
Explicit Integrating Factor Runge–Kutta Method for the Extended Fisher–Kolmogorov Equation
Fujian Province University Key Laboratory of Computation Science, School of Mathematical Sciences, Huaqiao University, Quanzhou 362021, China
*
Author to whom correspondence should be addressed.
Math. Comput. Appl. 2023, 28(6), 110; https://doi.org/10.3390/mca28060110
Submission received: 8 October 2023
/
Revised: 20 November 2023
/
Accepted: 20 November 2023
/
Published: 22 November 2023
(This article belongs to the Special Issue Recent Advances and New Challenges in Coupled Systems and Networks: Theory, Modelling, and Applications)
Abstract
:The extended Fisher–Kolmogorov (EFK) equation is an important model for phase transitions and bistable phenomena. This paper presents some fast explicit numerical schemes based on the integrating factor Runge–Kutta method and the Fourier spectral method to solve the EFK equation. The discrete global convergence of these new schemes is analyzed rigorously. Three numerical examples are presented to verify the theoretical analysis and the efficiency of the proposed schemes.
1. Introduction
The Fisher–Kolmogorov (FK) equation was first proposed by Fisher [1] and Kolmogorov [2] in 1937 to describe the interaction between the spread and adaptation of biological populations. By adding a stabilizing fourth-order derivative term to the FK equation, Collent [3] and Saarloos [4] proposed the extended FK (EFK) equation, which is a very important mathematical and physical model and has been widely used in many physics and engineering applications. In this paper, we consider the following EFK model with periodic boundary conditions:
where is a bounded area and is a positive constant. The function and is a double-well potential. When in (1), the EFK model reduces to the classical FK model. We assume that the function exhibits Lipschitz continuity with respect to , where the Lipschitz constant L is defined as follows
The EFK model (1) can be viewed as an gradient flow associated with the following energy
which is diminishing in time, i.e., .
All the above properties are determined by the inherent nature of the physical model. Thus, in order to avoid non-physical effects in the simulations over a long period of time, it is highly desirable to design a structure-preserving numerical scheme. There have been some excellent results in numerical research on the EFK model, such as the spline configuration method [5], nonlinear/linear finite difference schemes [6], and the local boundary integral method [7]. However, these works do not consider the physical properties of the EFK model. Recently, Sun et al. [8,9] proposed two convex splitting variable step BDF2/BDF3 schemes for the EFK model, and the proposed schemes preserve the modified discrete energy dissipation law.
The development of high-precision numerical schemes for PDEs of gradient-flow-type has attracted much attention. In this direction, it is worth mentioning the integrating factor Runge–Kutta (IFRK) method [10]. The IFRK method has demonstrated remarkable advantages for equations with stiff linear terms. The exponential function in this method provides the exact solution of the linear part, so the stiffness does not restrict the step size and the solution to the nonlinear part may be approximated explicitly. As a result, the IFRK method is often explicit [11,12]. In recent years, the IFRK method has attracted widespread attention for solving partial differential equations. Ju et al. [13] proposed the MBP-preserving IFRK method for semilinear parabolic equations. Li et al. [14] proposed a class of unconditional MBP-preserving IFRK schemes for the conservative Allen–Cahn equation. Zhang et al. [15,16] developed a class of high-order structure-preserving IFRK methods for the Allen–Cahn equation. Then, they further [17] proposed and analyzed a series of temporal up to fourth-order unconditionally structure-preserving single-step methods to solve the Allen–Cahn equation, and introduced parametric IFRK (pIFRK) schemes which can be used to construct higher-order parametric single-step methods. To the authors’ best knowledge, there are very few works in the literature on high-precision numerical methods for the EFK model. The objective of this paper is to develop a class of efficient, high-order-accurate schemes for the EFK model based on the explicit IFRK method coupled with non-decreasing abscissas (eIFRK+) [13,18].
The rest of the article is arranged as follows: In Section 2, a class of eIFRK+ schemes is proposed for solving the EFK model, and the corresponding theoretical analysis is given in Section 3. Numerical experiments are presented to test the performance of the proposed numerical schemes in Section 4, and some concluding remarks are given in Section 5.
2. eIFRK+ Fourier-Spectral Schemes for EFK Model
Define a periodic spatial grid with (N is even). All of the 2D periodic grid functions defined on are denoted by .
The discrete Fourier transform and the corresponding inverse transform are defined by [19]
respectively. We further define the operators and on as
and then, the Laplace operator can be approximated by
Next, we give some fully discrete eIFRK+ schemes for solving the EFK equation. Let and define the time node as (). According to the definitions of discrete spatial operators presented in Section 2, the EFK model (1) is reduced to the following nonlinear ordinary differential equations (ODEs) in time
where and . Let , then Equation (4) can be transformed into
which can be solved by the following s-stage classical RK scheme [18]
where , is the abscissa at each j-th layer. and , is a real constant.
Since , then (6) becomes
where , and . By a simple derivation, the above scheme can be rewritten in the following equivalent form [13]:
where , .
Some specific cases of system (7) are presented, which are denoted by eIFRK+, where q denotes the time accuracy:
3. Discrete Error Estimate
In this section, the discrete error estimation of the scheme (8) is discussed. We first give one lemma that helps to prove the discrete error estimation for the scheme.
Lemma 1
([20]). If a matrix A is negative semi-definite, then we have for , where denotes the standard vector or matrix -norm.
Theorem 1.
(Error estimate.) Assume that = with and the solution to the EFK model belongs to . Under the conditions of Lemma 1, then the numerical solutions generated by the eIFRK+ schemes (8) with satisfy the following error estimate
where is a positive constant depending on τ and h. : is a sample operator as .
Proof.
Let with ; the difference between Equations (1) and (4) leads to
where the truncated error satisfies .
Multiplying both sides of (14) by , then we have
Using the eIFRK+ scheme (8), we have the following fully discrete scheme for the above equation
where , , is the truncation error satisfying .
By the Lipschitz condition for , we have
Combination of the above estimates leads to
By using the Gronwall’s inequality, we further have
Similar to the estimation of , we have
Summing the above inequality from to m and using Gronwall’s inequality, we obtain the desired result
□
4. Numerical Experiments
We examine the accuracy and efficiency of the proposed method through three numerical experiments, including convergence and diminishing energy.
Example 1.
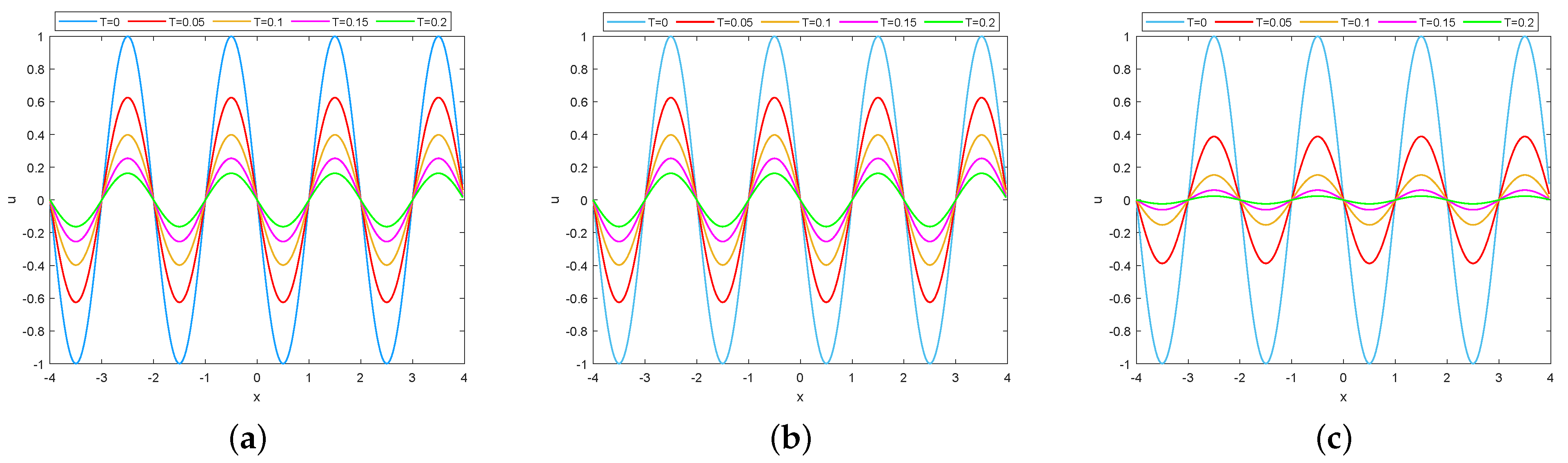
The purpose of the first numerical experiment is to verify the role of parameter κ. Consider the 1D EFK model in with the initial condition
We choose and . Figure 1 shows the numerical results using scheme eIFRK+(4,4) at different times . It is observed that the dynamic evolution of is almost identical to that of . However, when , the solution rapidly evolves from the initial state to zeros, which illustrates that the coefficient κ in the EFK model is a stable parameter.
Example 2.
To show the temporal accuracy and convergence of the proposed schemes, we consider the 2D EFK model in with and the initial condition
We adopt the uniform spatial mesh, which is sufficiently fine so that the errors caused by the spatial approximation can be ignored. The error between two different time steps τ and is calculated. The computational results are presented in Table 1. One may see that the numerical orders of time accuracy are close to the optimal order.
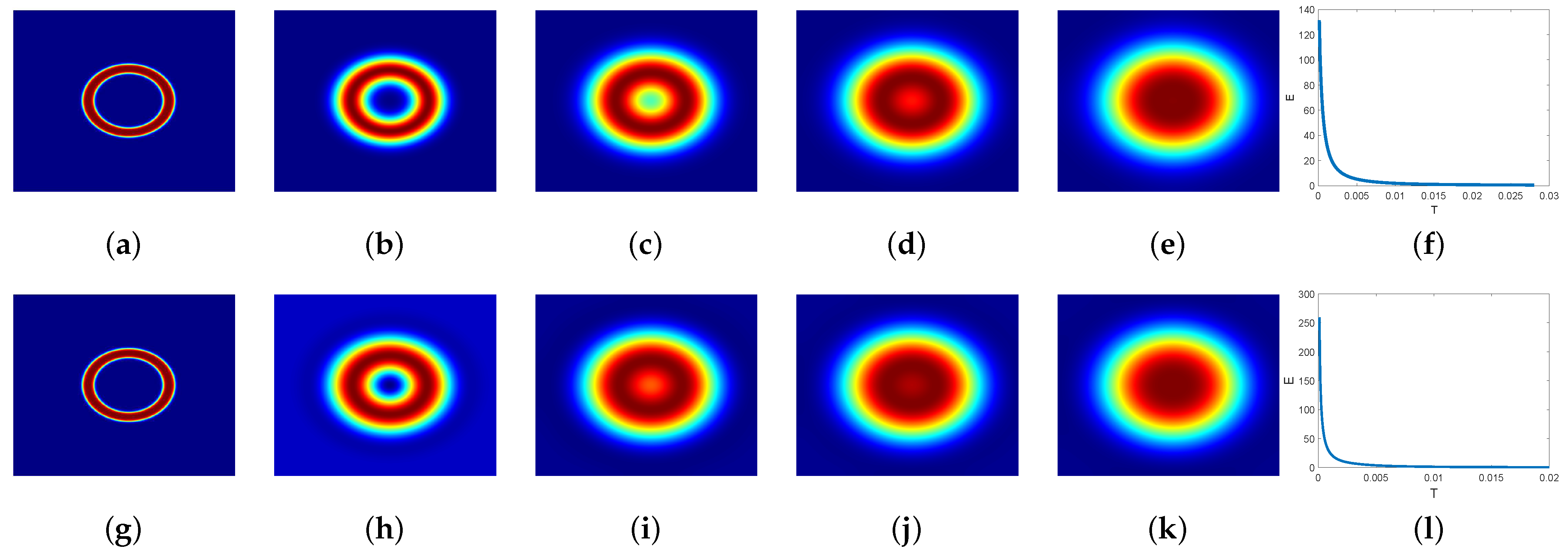
Example 3.
Consider the EFK model in with the initial condition
We choose , , and different κ, Figure 2 shows the evolutions of the snapshots and the energies of the numerical solutions obtained by the eIFRK+(4,4) scheme. It can be seen that the evolution speed of the numerical solution is largely clipped with the increase in κ, and the energy obtained from the energy image gradually reaches a steady state with decreasing time.
5. Conclusions
Based on the explicit IFRK method coupled with nondecreasing abscissas, we have obtained a class of fast and effective numerical schemes for the EFK model. The optimal error estimates of the fully discrete schemes have been analyzed. Three numerical experiments were carried out to test the accuracy and applicability of the proposed schemes.
Author Contributions
Y.W.: Conceptualization, Methodology, Software, Writing—original draft. S.Z.: Methodology, Writing—review & editing. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
Data will be made available on reasonable request.
Acknowledgments
The authors would like to thank the editor and referees for their valuable comments and suggestions which helped us to improve the results of this paper.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Fisher, R.A. The wave of advance of advantageous genes. Ann. Eugen. 1937, 7, 355–369. [Google Scholar] [CrossRef]
- Kolmogorov, A.N.; Petrovskii, I.G.; Piskunov, N.S. A study of the diffusion equation with increase in the quantity of matter, and its application to a biological problem. Mosc. Univ. Math. Bull. 1937, 1, 1–25. [Google Scholar]
- Coullet, P.; Elphick, C.; Repaux, D. Nature of spatial chaos. Phys. Rev. Lett. 1987, 58, 431. [Google Scholar] [CrossRef]
- Saarloos, W.V. Dynamical velocity selection: Marginal stability. Phys. Rev. Lett. 1987, 58, 2571. [Google Scholar] [CrossRef]
- Danumjaya, P.; Pani, A.K. Orthogonal cubic spline collocation method for the extended Fisher–Kolmogorov equation. J. Comput. Appl. Math. 2005, 174, 101–117. [Google Scholar] [CrossRef]
- Li, S.G.; Xu, D.; Zhang, J.; Sun, C.J. A new three-level fourth-order compact finite difference scheme for the extended Fisher–Kolmogorov equation. Appl. Numer. Math. 2022, 178, 41–51. [Google Scholar] [CrossRef]
- Ilati, M.; Dehghan, M. Direct local boundary integral equation method for numerical solution of extended Fisher–Kolmogorov equation. Eng. Comput. 2018, 34, 203–213. [Google Scholar] [CrossRef]
- Sun, Q.H.; Ji, B.Q.; Zhang, L. A convex splitting BDF2 method with variable time-steps for the extended Fisher–Kolmogorov equation. Comput. Math. Appl. 2022, 114, 73–82. [Google Scholar] [CrossRef]
- Sun, Q.H.; Wang, J.D.; Zhang, L.M. A new third-order energy stable technique and error estimate for the extended Fisher–Kolmogorov equation. Comput. Math. Appl. 2023, 142, 198–207. [Google Scholar] [CrossRef]
- Isherwood, L.; Grant, Z.J.; Gottlieb, S. Strong stability preserving integrating factor Runge–Kutta methods. SIAM J. Numer. Anal. 2018, 58, 3276–3307. [Google Scholar] [CrossRef]
- Zhai, S.Y.; Weng, Z.F.; Yang, Y.F. A high order operator splitting method based on spectral deferred correction for the nonlocal viscous Cahn–Hilliard equation. J. Comput. Phys. 2021, 446, 110632. [Google Scholar] [CrossRef]
- Zhai, S.Y.; Weng, Z.F.; Feng, X.L.; He, Y.N. Stability and error estimate of the operator splitting method for the phase field crystal equation. J. Sci. Comput. 2021, 86, 8. [Google Scholar] [CrossRef]
- Ju, L.L.; Li, X.; Qiao, Z.H.; Yang, J. Maximum bound principle preserving integrating factor Runge–Kutta methods for semilinear parabolic equations. J. Comput. Phys. 2021, 439, 110405. [Google Scholar] [CrossRef]
- Li, J.W.; Li, X.; Ju, L.L.; Feng, X.L. Stabilized integrating factor Runge–Kutta method and unconditional preservation of maximum bound principle. SIAM J. Sci. Comput. 2021, 43, A1780–A1802. [Google Scholar] [CrossRef]
- Zhang, H.; Yan, J.Y.; Qian, X.; Chen, X.W.; Song, S.H. Explicit third-order unconditionally structure-preserving schemes for conservative Allen–Cahn equations. J. Sci. Comput. 2022, 90, 1–29. [Google Scholar] [CrossRef]
- Zhang, H.; Yan, J.Y.; Qian, X.; Song, S.H. Numerical analysis and applications of explicit high order maximum principle preserving integrating factor Runge–Kutta schemes for Allen–Cahn equation. Appl. Numer. Math. 2021, 161, 372–390. [Google Scholar] [CrossRef]
- Zhang, H.; Yan, J.Y.; Qian, X.; Song, S.H. Up to fourth-order unconditionally structure-preserving parametric single-step methods for semilinear parabolic equations. Comput. Methods Appl. Mech. Eng. 2022, 393, 114817. [Google Scholar] [CrossRef]
- Shu, C.W.; Osher, S. Efficient implementation of essentially non-oscillatory shock-capturing schemes. J. Comput. Phys. 1988, 77, 439–471. [Google Scholar] [CrossRef]
- Shen, J.; Tang, T.; Wang, L.L. Spectral Methods: Algorithms, Analysis and Applications; Springer Science: London, UK; New York, NY, USA, 2011; Volume 41, pp. 1–45. [Google Scholar]
- Nan, C.X.; Song, H.L. The high-order maximum-principle-preserving integrating factor Runge–Kutta methods for nonlocal Allen–Cahn equation. J. Comput. Phys. 2022, 456, 111028. [Google Scholar] [CrossRef]
Figure 1.
Numerical solutions with different values for Example 1. (a) ; (b) ; (c) .

Figure 2.
The numerical solution u at different times for Example 3. Top: . Bottom: . (a) ; (b) ; (c) ; (d) ; (e) ; (f) ; (g) ; (h) ; (i) ; (j) ; (k) ; (l) .
Figure 2.
The numerical solution u at different times for Example 3. Top: . Bottom: . (a) ; (b) ; (c) ; (d) ; (e) ; (f) ; (g) ; (h) ; (i) ; (j) ; (k) ; (l) .


{kind=link}
{kind=link}
Table 1.
Temporal errors and convergence orders at with and for Example 2.
| eIFRK+ | M | Errmax | Rate | Err | Rate |
|---|---|---|---|---|---|
| 16 | - | 1.9491 | - | ||
| 32 | 0.9728 | 9.8542 | 0.9840 | ||
| 64 | 0.9862 | 4.9540 | 0.9921 | ||
| 128 | 0.9931 | 0.9961 | |||
| 16 | - | - | |||
| 32 | 1.9630 | 1.9622 | |||
| 64 | 1.9816 | 1.9812 | |||
| 128 | 1.9908 | 1.9906 | |||
| 16 | - | - | |||
| 32 | 2.9631 | 2.9583 | |||
| 64 | 2.9815 | 2.9791 | |||
| 128 | 2.9907 | 2.9896 | |||
| 16 | - | - | |||
| 32 | 3.9824 | 3.9830 | |||
| 64 | 3.9901 | 3.9915 | |||
| 128 | 3.9939 | 3.9958 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Wang, Y.; Zhai, S. Explicit Integrating Factor Runge–Kutta Method for the Extended Fisher–Kolmogorov Equation. Math. Comput. Appl. 2023, 28, 110. https://doi.org/10.3390/mca28060110
AMA Style
Wang Y, Zhai S. Explicit Integrating Factor Runge–Kutta Method for the Extended Fisher–Kolmogorov Equation. Mathematical and Computational Applications. 2023; 28(6):110. https://doi.org/10.3390/mca28060110
Chicago/Turabian StyleWang, Yanan, and Shuying Zhai. 2023. "Explicit Integrating Factor Runge–Kutta Method for the Extended Fisher–Kolmogorov Equation" Mathematical and Computational Applications 28, no. 6: 110. https://doi.org/10.3390/mca28060110