Global Behavior of Solutions to a Higher-Dimensional System of Difference Equations with Lucas Numbers Coefficients


Abstract
:1. Introduction
2. Preliminaries
- 1.
- 2.
- 3.
- 4.
- 5.
- 6.
- 7.
- 8.
- 1.
- 2.
- 3.
3. Main Results
3.1. Solvability of System (8)
3.1.1. Case
- When j is odd, we have thatThis implies that for we get
- Similarly, for , we get
3.1.2. Case
- When j is even, we have This implies thatSimilarly,
- When j is odd, we have This implies thatandBy the same way, for j ∈ {1, 3, 5, ⋯, 2p − 1}, we haveThenNow, using the fact that
4. Global Stability of the Well-Defined Solutions of System (3)
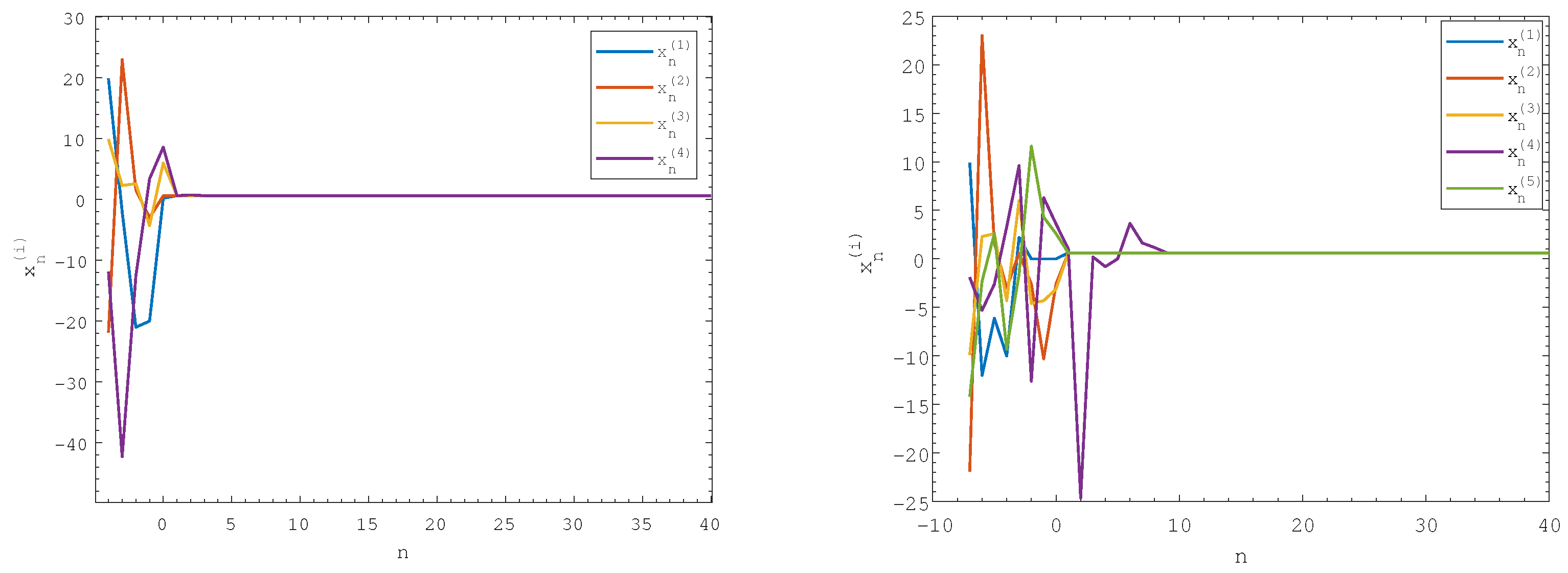
5. Numerical Examples
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. (Solvability of Equation (13))
Appendix B. (Locally Stability of System (3))
- 1.
- If all the eigenvalues of the Jacobian matrix A lie in the open unit disk , then the fixed point of the linearized system is locally asymptotically stable.
- 2.
- If at least one eigenvalue of the Jacobian matrix A have absolute value greater than one, then the fixed point of linearized system is unstable.
References
- Alzabut, J.; Selvam, A.G.M.; Dhakshinamoorthy, V.; Mohammadi, H.; Rezapour, S. On chaos of discrete time fractional order host-immune-tumor cells interaction model. J. Appl. Math. Comput. 2022, 68, 4795–4820. [Google Scholar] [CrossRef]
- Almatrafi, M.B.; Berkal, M. Bifurcation Analysis and Chaos Control for Prey-Predator Model with Allee Effect. Int. J. Anal. Appl. 2023, 21, 131. [Google Scholar] [CrossRef]
- Berkal, M.; Navarro, J.F.; Almatrafi, M.B. Qualitative Behavior for a Discretized Conformable Fractional-Order Lotka-Volterra Model with Harvesting Effects. Int. J. Anal. Appl. 2024, 22, 51. [Google Scholar] [CrossRef]
- Berkal, M.; Almatrafi, M.B. Bifurcation and Stability of Two-Dimensional Activator–Inhibitor Model with Fractional-Order Derivative. Fractal Fract. 2023, 7, 344. [Google Scholar] [CrossRef]
- Berkal, M.; Navarro, J.F. Qualitative behavior of a two-dimensional discrete-time prey–predator model. Comput. Math. Methods 2021, 3, e1193. [Google Scholar] [CrossRef]
- Koshy, T. Fibonacci and Lucas Numbers with Applications; Wiley: Hoboken, NJ, USA, 2001. [Google Scholar]
- Abo-Zeid, R. Forbidden sets and stability in some rational difference equations. J. Differ. Equ. Appl. 2018, 24, 220–239. [Google Scholar] [CrossRef]
- Abo-Zeid, R. Global behavior of two third order rational difference equations with quadratic terms. Math. Slovaca 2019, 69, 147–158. [Google Scholar] [CrossRef]
- Abo-Zeid, R. Global behavior of a fourth-order difference equation with quadratic term. Bol. Soc. Mat. Mex. 2019, 25, 187–194. [Google Scholar] [CrossRef]
- Abo-Zeid, R. Behavior of solutions of a rational third order difference equation. J. Appl. Math. Inform. 2020, 38, 1–12. [Google Scholar]
- Abo-Zeid, R. On the solutions of a higher order recursive sequence. Malaya J. Mat. 2020, 8, 695–701. [Google Scholar] [CrossRef]
- Atpinar, S.; Yazlik, Y. Qualitative behavior of exponential type of fuzzy difference equations system. J. Appl. Math. Comput. 2023, 69, 4135–4162. [Google Scholar] [CrossRef]
- Berkal, M.; Navarro, J.F. Qualitative study of a second order difference equation. Turk. J. Math. 2023, 47, 516–527. [Google Scholar] [CrossRef]
- Berkal, M.; Berehal, K.; Rezaiki, N. Representation of solutions of a system of five-order nonlinear difference equations. J. Appl. Math. Inform. 2022, 40, 409–431. [Google Scholar]
- Gümüş, M.; Abo-Zeid, R. An explicit formula and forbidden set for a higher order difference equation. J. Appl. Math. Comput. 2020, 63, 133–142. [Google Scholar] [CrossRef]
- Gümüş, M.; Abo-Zeid, R. Global behavior of a rational second order difference equation. J. Appl. Math. Comput. 2020, 62, 119–133. [Google Scholar] [CrossRef]
- Ghezal, A. Note on a rational system of (4k+1)-order difference equations: Periodic solution and convergence. J. Appl. Math. Comput. 2023, 69, 2207–2215. [Google Scholar] [CrossRef]
- Ghezal, A.; Balegh, M.; Zemmouri, I. Solutions and local stability of the Jacobsthal system of difference equations. AIMS Math. 2024, 9, 3576–3591. [Google Scholar] [CrossRef]
- Haddad, N.; Touafek, N.; Rabago, J.F.T. Well-defined solutions of a system of difference equations. J. Appl. Math. Comput. 2018, 56, 439–458. [Google Scholar] [CrossRef]
- Halim, Y.; Berkal, M.; Khelifa, A. On a three-dimensional solvable system of difference equations. Turk. J. Math. 2020, 44, 1263–1288. [Google Scholar] [CrossRef]
- Halim, Y.; Khelifa, A.; Berkal, M. Representation of solutions of a two-dimensional system of difference equations. Miskolc Math. Notes 2020, 21, 203–218. [Google Scholar] [CrossRef]
- Halim, Y.; Khelifa, A.; Berkal, M.; Bouchair, A. On a solvable system of p difference equations of higher order. Period. Math. Hung. 2022, 85, 109–127. [Google Scholar] [CrossRef]
- Hamioud, H.; Touafek, N.; Dekkar, I.; Yazlik, Y. On a three dimensional nonautonomous system of difference equations. J. Appl. Math. Comput. 2022, 68, 3901–3936. [Google Scholar] [CrossRef]
- Khelifa, A.; Halim, Y.; Berkal, M. Solutions of a system of two higher-order difference equations in terms of Lucas sequence. Univers. J. Math. Appl. 2019, 2, 202–211. [Google Scholar]
- Khelifa, A.; Halim, Y.; Bouchair, A.; Berkal, M. On a system of three difference equations of higher order solved in terms of Lucas and Fibonacci numbers. Math. Slovaca 2020, 70, 641–656. [Google Scholar] [CrossRef]
- Khelifa, A.; Halim, Y. General solutions to systems of difference equations and some of their representations. J. Appl. Math. Comput. 2021, 67, 439–453. [Google Scholar] [CrossRef]
- Khelifa, A.; Halim, Y.; Berkal, M. On the solutions of a system of (2p+1) difference equations of higher order. Miskolc Math. Notes 2021, 22, 331–350. [Google Scholar] [CrossRef]
- Kara, M. Investigation of the global dynamics of two exponential-form difference equations systems. Electron. Res. Arch. 2023, 31, 6697–6724. [Google Scholar] [CrossRef]
- Kara, M.; Yazlik, Y. Solvable three-dimensional system of higher-order nonlinear difference equations. Filomat 2022, 36, 3449–3469. [Google Scholar] [CrossRef]
- Stevic, S. Representation of solutions of bilinear difference equations in terms of generalized Fibonacci sequences. Electron. J. Qual. Theory Differ. Equ. 2014, 2014, 1–15. [Google Scholar] [CrossRef]
- Stević, S.; Iričanin, B.; Kosmala, W.; Šmarda, Z. Note on the bilinear difference equation with a delay. Math. Methods Appl. Sci. 2018, 41, 9349–9360. [Google Scholar] [CrossRef]
- Tollu, D.T.; Yazlik, Y.; Taskara, N. On the solutions of two special types of Riccati difference equation via Fibonacci numbers. Adv. Differ. Equ. 2013, 2013, 1–7. [Google Scholar] [CrossRef]
- Berkal, M.; Abo-Zeid, R. Solvability of a Second-Order Rational System of Difference Equations. Fundam. J. Math. Appl. 2023, 6, 232–242. [Google Scholar] [CrossRef]
- Kara, M.; Yazlik, Y. On eight solvable systems of difference equations in terms of generalized Padovan sequences. Miskolc Math. Notes 2021, 22, 695–708. [Google Scholar] [CrossRef]
- Kara, M.; Yazlik, Y. Representation of solutions of eight systems of difference equations via generalized Padovan sequences. Internat. J. Nonlinear Anal. Appl. 2021, 12, 447–471. [Google Scholar]
- Yazlik, Y.; Tollu, D.T.; Taskara, N. On the solutions of difference equation systems with Padovan numbers. Appl. Math. 2013, 4, 15. [Google Scholar] [CrossRef]
- Vajda, S. Fibonacci and Lucas Numbers, and the Golden Section: Theory and Applications; Courier Corporation: New York, NY, USA, 2008. [Google Scholar]

{kind=link}
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Berkal, M.; Navarro, J.F.; Abo-Zeid, R. Global Behavior of Solutions to a Higher-Dimensional System of Difference Equations with Lucas Numbers Coefficients. Math. Comput. Appl. 2024, 29, 28. https://doi.org/10.3390/mca29020028
Berkal M, Navarro JF, Abo-Zeid R. Global Behavior of Solutions to a Higher-Dimensional System of Difference Equations with Lucas Numbers Coefficients. Mathematical and Computational Applications. 2024; 29(2):28. https://doi.org/10.3390/mca29020028
Chicago/Turabian StyleBerkal, Messaoud, Juan Francisco Navarro, and Raafat Abo-Zeid. 2024. "Global Behavior of Solutions to a Higher-Dimensional System of Difference Equations with Lucas Numbers Coefficients" Mathematical and Computational Applications 29, no. 2: 28. https://doi.org/10.3390/mca29020028