Analysis of Coaxiality Error Induced by the Cube Corner Retro-Reflector Geometrical and Assembly Errors of an Acquisition, Pointing, and Tracking System

Abstract
:1. Introduction
2. Coaxiality Measurement Method
3. Error Modeling and Analysis
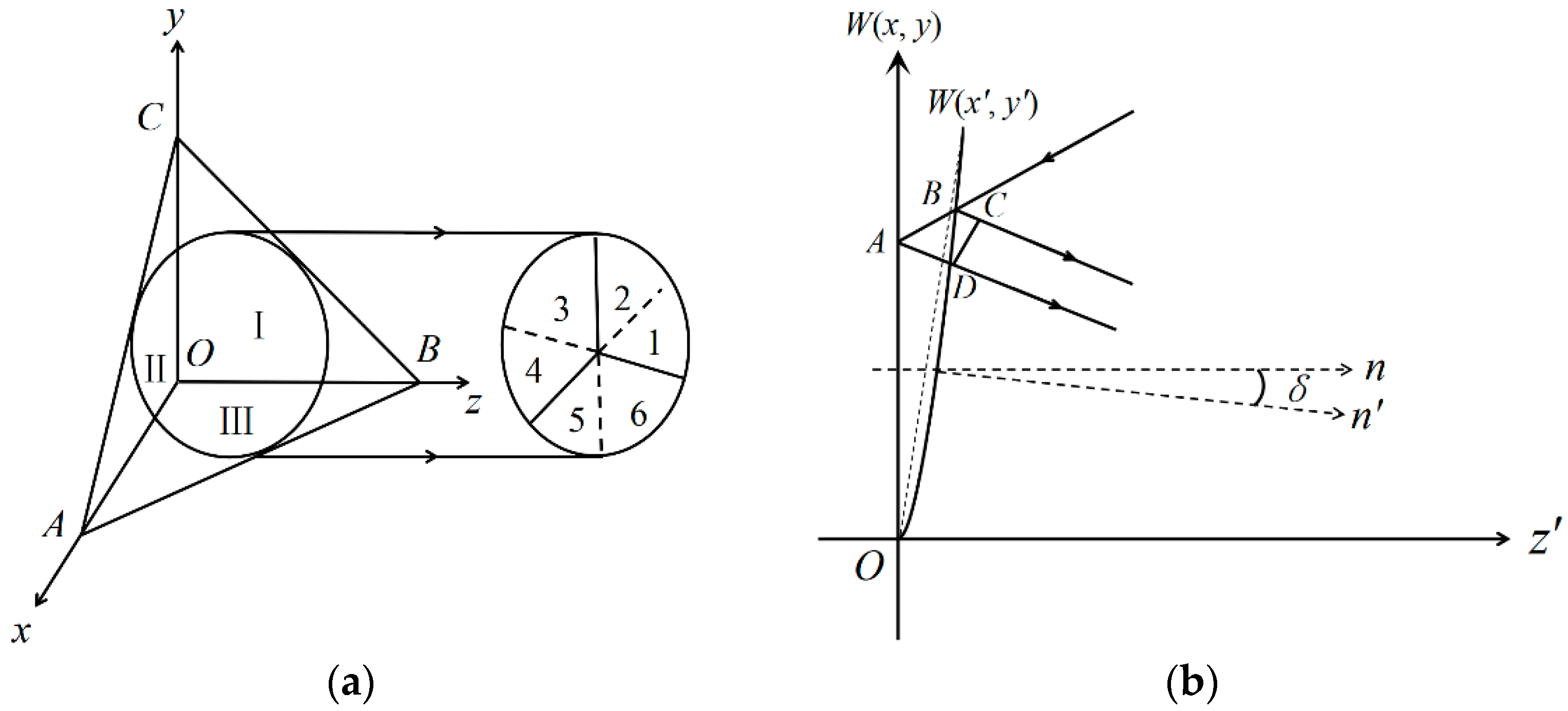
3.1. Geometrical Error of CCR
N2 = (sin(δ12), 0, cos(δ12)) × (0, sin(δ23), cos(δ23)).
N3 = (sin(δ31), cos(δ31), 0) × (0, cos(δ23), sin(δ23))
3.2. Influence of Assembly Error on Pointing Accuracy
4. Coaxiality Error Analysis
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Osborn, J.; Townson, M.J.; Farley, O.J.D.; Reeves, A.; Calvo, R.M. Adaptive Optics pre-compensated laser uplink to LEO and GEO. Opt. Express 2021, 29, 6113–6132. [Google Scholar] [CrossRef] [PubMed]
- Xie, X.; Zhou, Y.; Yu, S.; Zhao, S.; Ma, J. Received power attenuation due to the wave-front aberrations induced by the receiving optical antenna in an inter-satellite laser communication link. Opt. Commun. 2020, 463, 125371. [Google Scholar] [CrossRef]
- Griffiths, A.D.; Herrnsdorf, J.; Henderson, R.K.; Strain, M.J.; Dawson, M.D. High-Sensitivity Inter-Satellite Optical Communications using Chip-Scale LED and Single Photon Detector Hardware. Opt. Express 2021, 29, 10749–10768. [Google Scholar] [CrossRef] [PubMed]
- Calzolaio, D.; Curreli, F.; Duncan, J.; Moorhouse, A.; Perez, G.; Voegt, S. EDRS-C–The second node of the European Data Relay System is in orbit—ScienceDirect. Acta Astronaut. 2020, 177, 537–544. [Google Scholar] [CrossRef]
- Jiang, H.; Fu, Q.; Zhao, Y.W.; Liu, X. Development status and trend of space information network and laser communication. Chin. J. Internet Things 2019, 3, 1–8. [Google Scholar]
- Kaushal, H.; Kaddoum, G. Optical Communication in Space: Challenges and Mitigation Techniques. IEEE Commun. Surv. Tutor. 2017, 19, 57–96. [Google Scholar] [CrossRef]
- Xu, G.; Zhang, Q.; Song, Z.; Ai, B. Relay-Assisted Deep Space Optical Communication System over Coronal Fading Channels. IEEE Trans. Aerosp. Electron. Syst. 2023, 99, 1–16. [Google Scholar] [CrossRef]
- Teng, Y.; Zhang, M.; Tong, S. The Optimization Design of Sub-Regions Scanning and Vibration Analysis for Beaconless Spatial Acquisition in the Inter-Satellite Laser Communication System. IEEE Photonics J. 2018, 10, 1–11. [Google Scholar] [CrossRef]
- Ma, J.; Ma, J.; Tan, l.; Liu, J.; Han, Q.; Yu, S.; Yu, J.; Yang, Y. Coaxiality Measurement Method of Laser Transmitting Axis and Mechanical Datum Plane Based on Cube Corner Reflector. Patent CN101210804A, 2 July 2008. [Google Scholar]
- Wang, J.; Zhou, Y.; Bai, R.; Wang, G. Point-Ahead Angle and Coalignment Error Measurement Method for Free-Space Optical Communication Systems. J. Light. Technol. 2017, 35, 3886–3893. [Google Scholar] [CrossRef]
- Yu, S.; Wu, F.; Tan, L.; Ma, J. Static position errors correction on the satellite optical communication terminal. Opt. Eng. 2017, 56, 026112. [Google Scholar] [CrossRef]
- Wu, S.; Tan, L.; Yu, S.; Ma, J. Analysis and correction of axis error in periscope-type optical communication terminals. Opt. Laser Technol. 2013, 46, 127–133. [Google Scholar] [CrossRef]
- Weng, X.T. Planeness issues of reflecting surfaces on a cube corner retroreflector. Opt. Technol. 2002, 28, 71–73. [Google Scholar]
- Nie, H.; Weng, X.; Li, S. The Far-Field Diffractive Characteristics of Cube-Corner Prism. Acta Opt. Sin. 2003, 23, 1470–1474. [Google Scholar]
- Qian, F. Research on the High Precision APT System in Satellite-to-Earth Quantum Communication. Ph.D. Thesis, University of Chinese Academy of Sciences, Beijing, China, 2014; pp. 87–91. [Google Scholar]
- Minato, A.; Sugimoto, N.; Sasano, Y. Optical design of cube-corner retroreflectors having curved mirror surfaces. Appl. Opt. 1992, 31, 6015–6020. [Google Scholar] [CrossRef] [PubMed]
- Zhong, S.Y.; Xu, G.P.; Wu, J. Study of the Diffraction Light Intensity in the Far-field on the Satellite Laser Cube Corner Reflector. Laser Infrared 2009, 39, 128–132. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Abbreviation | Explanation | Symbol | Explanation |
|---|---|---|---|
| APT | Acquisition, pointing, and tracking | GEO | Geosynchronous Earth Orbit |
| CCR | Cube corner retro-reflector | OPD | Optical path difference |
| EDRS | Europe data relay system | δ | Dihedral angle error |
| CE | Coaxiality error | W (,) | Wavefront |
| PAA | Point-ahead angle | Δd | CCR Geometrical error |
| FSM | Fast-steering mirror | ds | OPD (dihedral angle error induced) |
| FM | Folding mirror | dt | OPD (planeness error induced) |
| Az | Azimuth | N1, N2... | Newton’s rings |
| El | Elevation | α | Angle rotated around the x-axis |
| PAM | Point-ahead mirror | β | Angle rotated around the y-axis |
| CCD | Charge coupled device | γ | Angle rotated around the z-axis |
| LEO | Low Earth Orbit | ε | Angle between vectors |
| MEO | Medium Earth Orbit |
| Assembly Error (°) | Assembly Elements | |||
|---|---|---|---|---|
| M1 | M2 | Az FM | El FM | |
| Coaxiality Error (Urad) | ||||
| 0.001 | 18 | 18 | 23 | 10 |
| 0.002 | 37 | 17 | 36 | 9 |
| 0.003 | 61 | 13 | 53 | 10 |
| 0.004 | 83 | 19 | 61 | 10 |
| 0.005 | 102 | 21 | 71 | 13 |
| Assembly Error (°) | Assembly Elements | |||
|---|---|---|---|---|
| M1 | M2 | Az FM | El FM | |
| Coaxiality Error (Urad) | ||||
| 0.001 | 39 | 29 | 38 | 19 |
| 0.002 | 73 | 31 | 40 | 31 |
| 0.003 | 77 | 29 | 61 | 33 |
| 0.004 | 107 | 30 | 75 | 43 |
| 0.005 | 133 | 25 | 86 | 34 |
| Assembly Error (°) | Assembly Elements | |||
|---|---|---|---|---|
| M1 | M2 | Az FM | El FM | |
| Coaxiality Error (Urad) | ||||
| 0.001 | 166 | 137 | 144 | 141 |
| 0.002 | 192 | 142 | 147 | 136 |
| 0.003 | 219 | 141 | 153 | 127 |
| 0.004 | 245 | 145 | 157 | 124 |
| 0.005 | 264 | 139 | 162 | 134 |
| Assembly Error (°) | Assembly Elements | |||
|---|---|---|---|---|
| M1 | M2 | Az FM | El FM | |
| Coaxiality Error (Urad) | ||||
| 0.001 | 112 | 86 | 91 | 79 |
| 0.002 | 138 | 85 | 98 | 81 |
| 0.003 | 165 | 90 | 112 | 79 |
| 0.004 | 192 | 84 | 111 | 83 |
| 0.005 | 232 | 88 | 130 | 82 |
| Assembly Error (°) | Assembly Elements | |||
|---|---|---|---|---|
| M1 | M2 | Az FM | El FM | |
| Coaxiality Error (Urad) | ||||
| 0.001 | 646 | 683 | 690 | 692 |
| 0.002 | 629 | 678 | 692 | 689 |
| 0.003 | 599 | 677 | 686 | 681 |
| 0.004 | 572 | 684 | 699 | 685 |
| 0.005 | 548 | 683 | 700 | 673 |
| Assembly Error (°) | Assembly Elements | |||
|---|---|---|---|---|
| M1 | M2 | Az FM | El FM | |
| Coaxiality Error (Urad) | ||||
| 0.001 | 300 | 329 | 322 | 327 |
| 0.002 | 274 | 325 | 333 | 329 |
| 0.003 | 243 | 324 | 335 | 330 |
| 0.004 | 216 | 325 | 335 | 325 |
| 0.005 | 192 | 328 | 344 | 334 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, D.; Mao, Z.; Sun, L.; Zhang, H.; Zhang, F. Analysis of Coaxiality Error Induced by the Cube Corner Retro-Reflector Geometrical and Assembly Errors of an Acquisition, Pointing, and Tracking System. Photonics 2023, 10, 1176. https://doi.org/10.3390/photonics10101176
Li D, Mao Z, Sun L, Zhang H, Zhang F. Analysis of Coaxiality Error Induced by the Cube Corner Retro-Reflector Geometrical and Assembly Errors of an Acquisition, Pointing, and Tracking System. Photonics. 2023; 10(10):1176. https://doi.org/10.3390/photonics10101176
Chicago/Turabian StyleLi, Daquan, Zhaoyong Mao, Lijuan Sun, Haifeng Zhang, and Furui Zhang. 2023. "Analysis of Coaxiality Error Induced by the Cube Corner Retro-Reflector Geometrical and Assembly Errors of an Acquisition, Pointing, and Tracking System" Photonics 10, no. 10: 1176. https://doi.org/10.3390/photonics10101176