

Detection of Coconut Clusters Based on Occlusion Condition Using Attention-Guided Faster R-CNN for Robotic Harvesting

 , , ,
, , ,  and
and
Abstract
:1. Introduction
2. Related Work
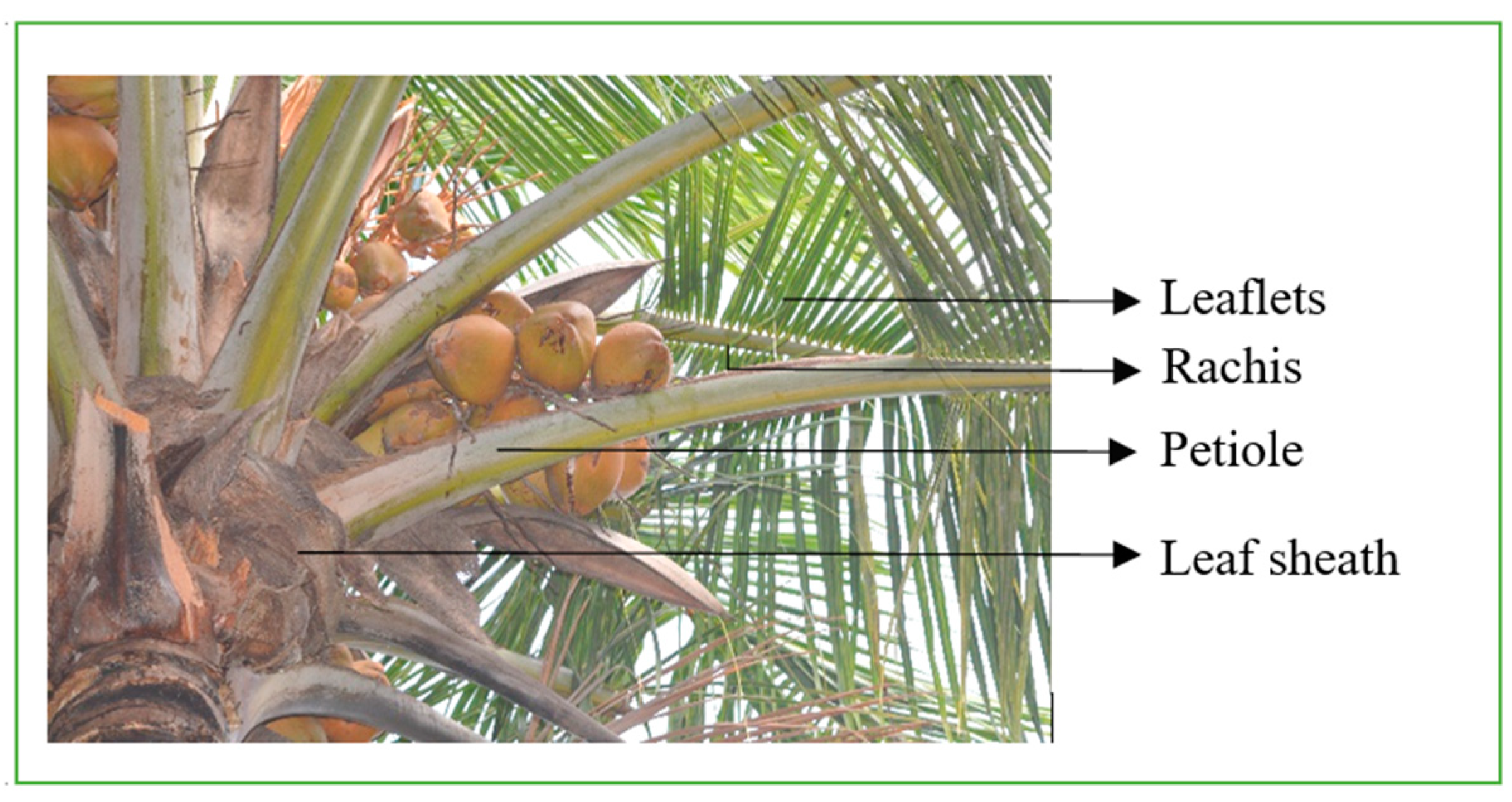
3. Materials and Methods
3.1. Dataset and Software
3.1.1. Image Acquisition
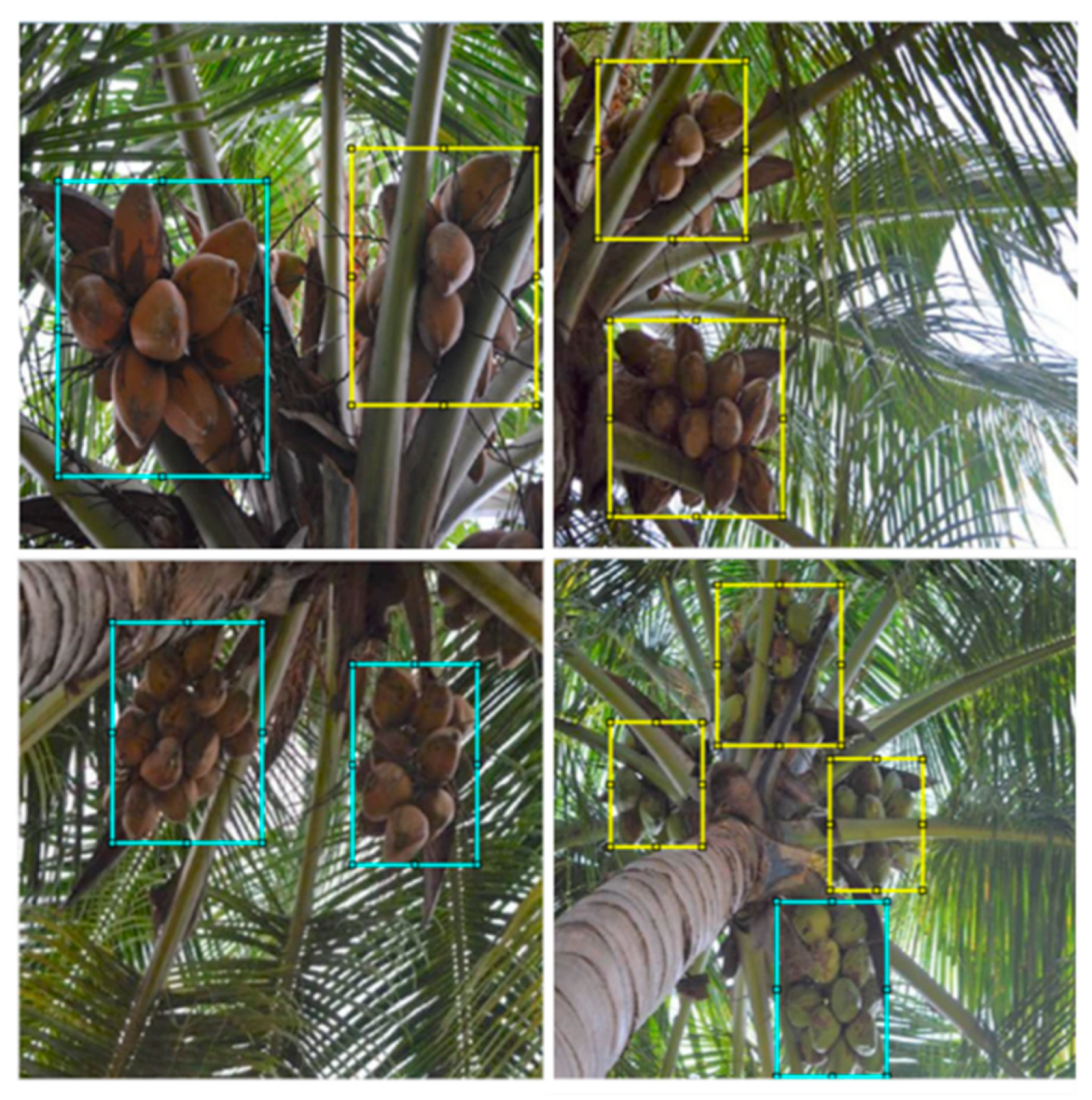
3.1.2. Coconut Classes and Ground Truth Preparation
3.1.3. Image Augmentation
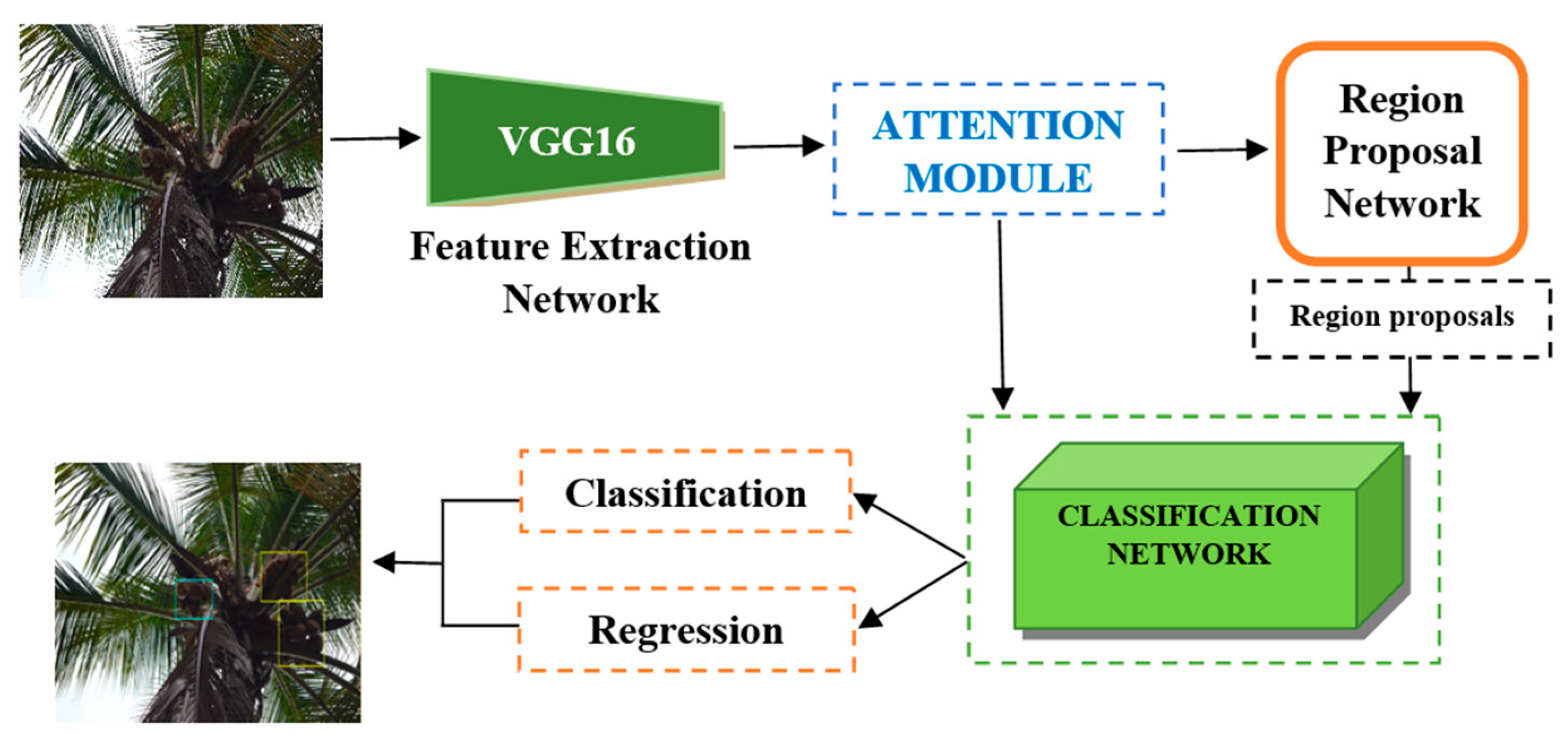
3.2. Deep Learning Network Architecture
3.2.1. Feature Extraction Network and Attention Module
3.2.2. Region Proposal Network and Classification Network
3.3. Network Training
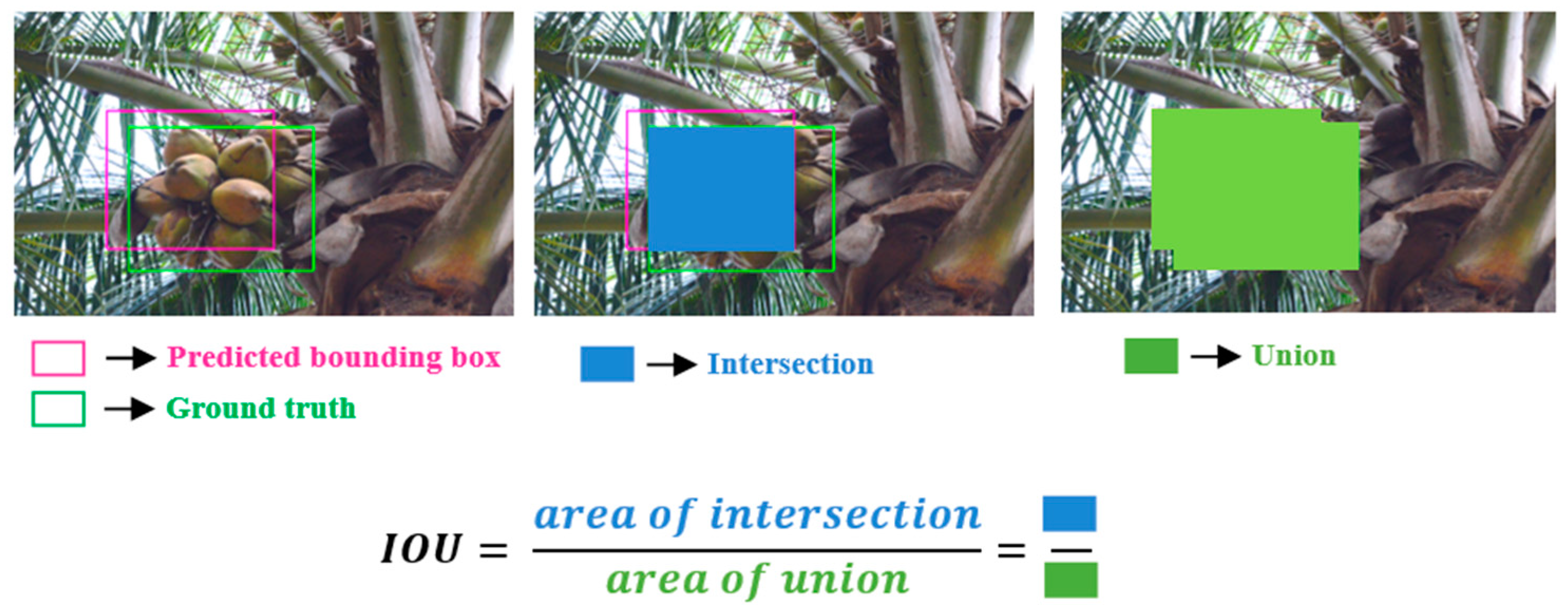
3.4. Performance Evaluation Metrics
3.4.1. Weighted Mean Intersection-over-Union
3.4.2. Mean Average Precision
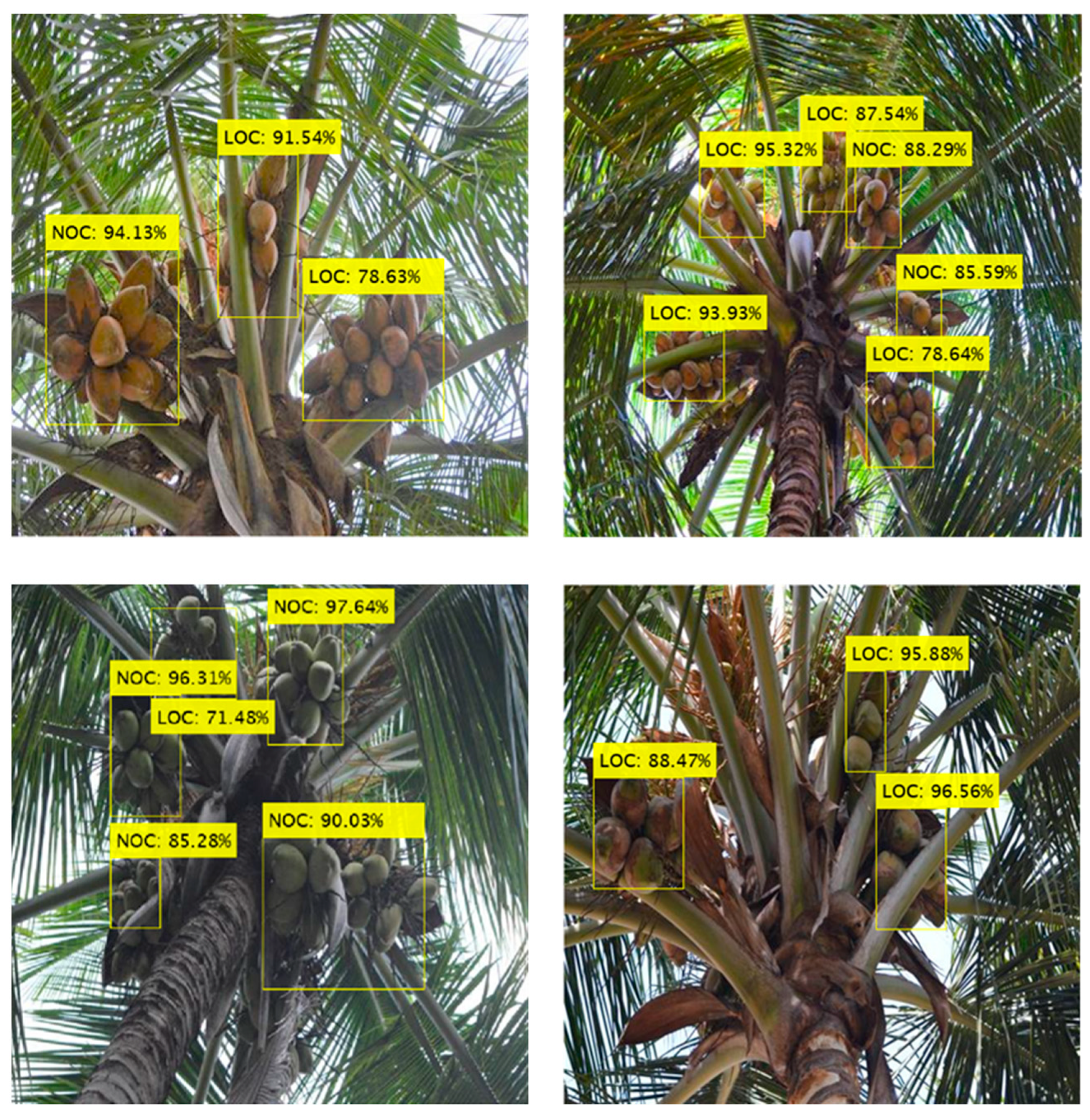
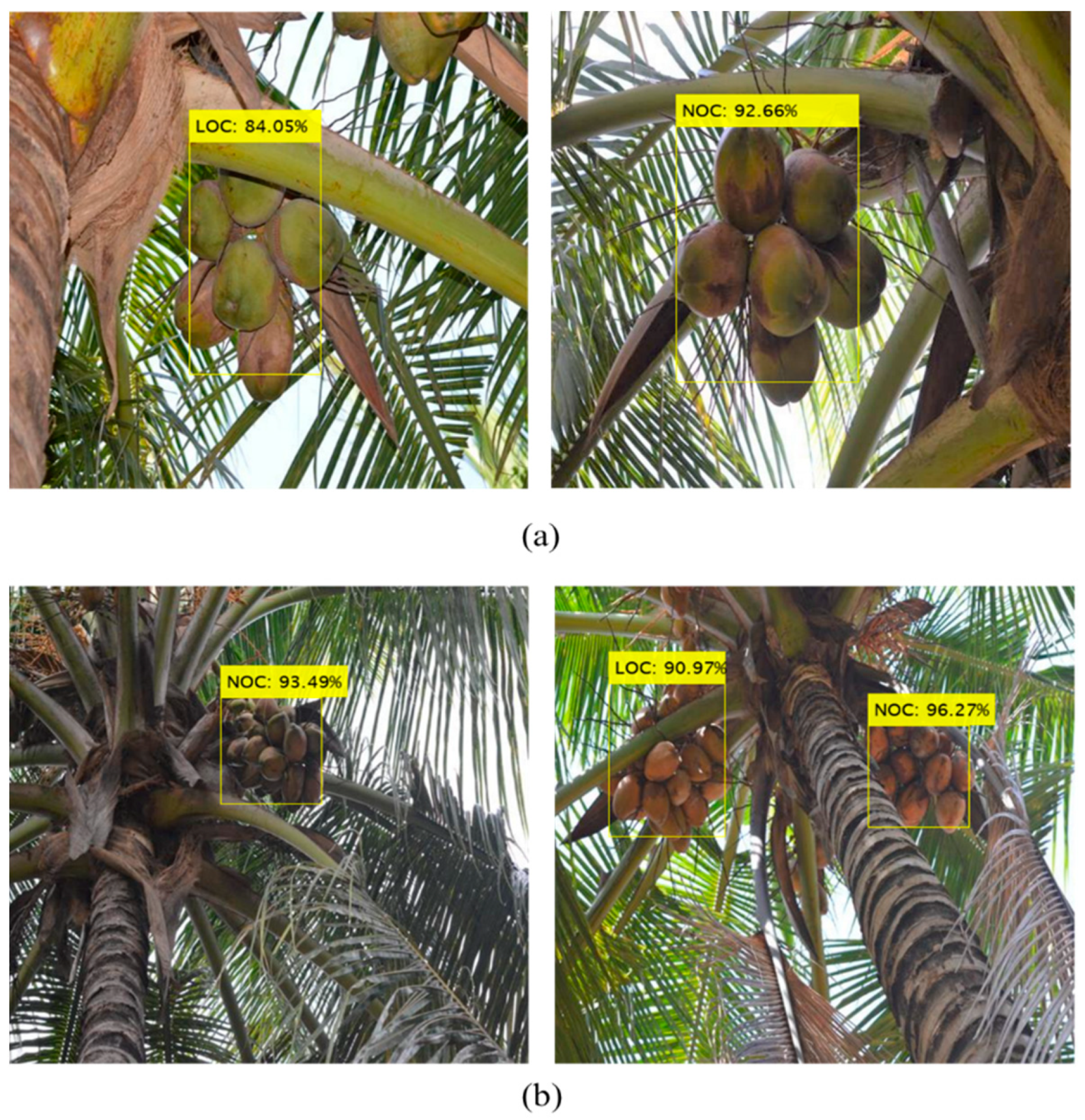
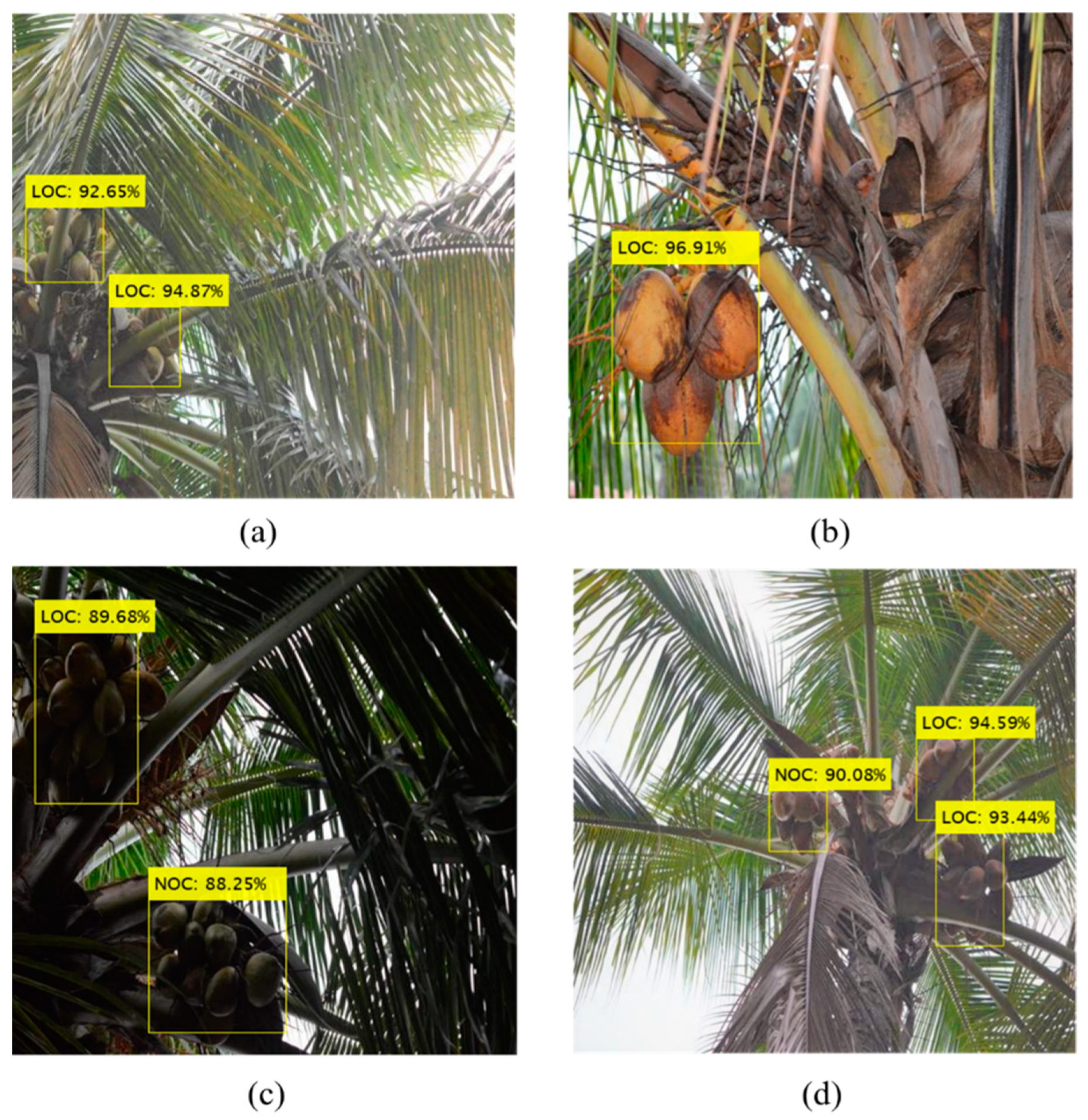
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ignacio, I.F.; Miguel, T.S. Research Opportunities on the Coconut (Cocos Nucifera L.) Using New Technologies. South Afr. J. Bot. 2021, 141, 414–420. [Google Scholar] [CrossRef]
- Kabir Ahmad, R.; Anwar Sulaiman, S.; Yusup, S.; Sham Dol, S.; Inayat, M.; Aminu Umar, H. Exploring the Potential of Coconut Shell Biomass for Charcoal Production. Ain Shams Eng. J. 2022, 13, 101499. [Google Scholar] [CrossRef]
- Maciej, S.; Becker, F.G.; Cleary, M.; Team, R.M.; Holtermann, H.; The, D.; Agenda, N.; Science, P.; Sk, S.K.; Hinnebusch, R.; et al. Health of Coconut Tree Climbers of Rural Southern India—Medical Emergencies, Body Mass Index and Occupational Marks: A Quantitative and Survey Study. J. Clin. Diagnostic Res. 2012, 6, 57–60. [Google Scholar] [CrossRef]
- Author, C.; Purushottamrao Kolhe, K.; Powar, A.G.; Dhakane, A.D.; Mankar, S.H. Stability and Ergonomic Design Features of Tractor Mounted Hydraulic Elevator for Coconut Harvesting. Am. J. Eng. Appl. Sci. 2011, 4, 380–389. [Google Scholar] [CrossRef]
- Lam, T.L.; Xu, Y. Climbing Strategy for a Flexible Tree Climbing Robot—Treebot. IEEE Trans. Robot. 2011, 27, 1107–1117. [Google Scholar] [CrossRef]
- Kuttankulangara Manoharan, S.; Megalingam, R.K. Coconut Tree Structure Analysis—Background Work for an Unmanned Coconut Harvesting Robot Design. Commun. Comput. Inf. Sci. 2019, 835, 207–222. [Google Scholar] [CrossRef]
- Megalingam, R.K.; Manoharan, S.K.; Mohandas, S.M.; Vadivel, S.R.R.; Gangireddy, R.; Ghanta, S.; Kumar, K.S.; Teja, P.S.; Sivanantham, V. Amaran:An Unmanned Robotic Coconut Tree Climber and Harvester. IEEE/ASME Trans. Mechatron. 2021, 26, 288–299. [Google Scholar] [CrossRef]
- Abraham, A.; Girish, M.; Vitala, H.R.; Praveen, M.P. Design of Harvesting Mechanism for Advanced Remote-Controlled Coconut Harvesting Robot (A.R.C.H-1). Indian J. Sci. Technol. 2014, 7, 1465–1470. [Google Scholar] [CrossRef]
- Dubey, A.P.; Pattnaik, S.M.; Banerjee, A.; Sarkar, R.; Kumar, S.R. Autonomous Control and Implementation of Coconut Tree Climbing and Harvesting Robot. Procedia Comput. Sci. 2016, 85, 755–766. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Y.; Gong, L.; Huang, Y.; Liu, C. A Review of Key Techniques of Vision-Based Control for Harvesting Robot. Comput. Electron. Agric. 2016, 127, 311–323. [Google Scholar] [CrossRef]
- Montoya-Cavero, L.E.; Díaz de León Torres, R.; Gómez-Espinosa, A.; Escobedo Cabello, J.A. Vision Systems for Harvesting Robots: Produce Detection and Localization. Comput. Electron. Agric. 2022, 192, 106562. [Google Scholar] [CrossRef]
- Vasconez, J.P.; Kantor, G.A.; Auat Cheein, F.A. Human–Robot Interaction in Agriculture: A Survey and Current Challenges. Biosyst. Eng. 2019, 179, 35–48. [Google Scholar] [CrossRef]
- Koirala, A.; Walsh, K.B.; Wang, Z.; McCarthy, C. Deep Learning—Method Overview and Review of Use for Fruit Detection and Yield Estimation. Comput. Electron. Agric. 2019, 162, 219–234. [Google Scholar] [CrossRef]
- Hasan, A.S.M.M.; Sohel, F.; Diepeveen, D.; Laga, H.; Jones, M.G.K. A Survey of Deep Learning Techniques for Weed Detection from Images. Comput. Electron. Agric. 2021, 184, 106067. [Google Scholar] [CrossRef]
- Osco, L.P.; Marcato Junior, J.; Marques Ramos, A.P.; de Castro Jorge, L.A.; Fatholahi, S.N.; de Andrade Silva, J.; Matsubara, E.T.; Pistori, H.; Gonçalves, W.N.; Li, J. A Review on Deep Learning in UAV Remote Sensing. Int. J. Appl. Earth Obs. Geoinf. 2021, 102, 102456. [Google Scholar] [CrossRef]
- Nguyen, T.T.; Vandevoorde, K.; Wouters, N.; Kayacan, E.; De Baerdemaeker, J.G.; Saeys, W. Detection of Red and Bicoloured Apples on Tree with an RGB-D Camera. Biosyst. Eng. 2016, 146, 33–44. [Google Scholar] [CrossRef]
- Liu, X.; Zhao, D.; Jia, W.; Ji, W.; Sun, Y. A Detection Method for Apple Fruits Based on Color and Shape Features. IEEE Access 2019, 7, 67923–67933. [Google Scholar] [CrossRef]
- Singh, N.; Tewari, V.K.; Biswas, P.K.; Pareek, C.M.; Dhruw, L.K. Image Processing Algorithms for In-Field Cotton Boll Detection in Natural Lighting Conditions. Artif. Intell. Agric. 2021, 5, 142–156. [Google Scholar] [CrossRef]
- Divyanth, L.G.; Ahmad, A.; Saraswat, D. A Two-Stage Deep-Learning Based Segmentation Model for Crop Disease Quantification Based on Corn Field Imagery. Smart Agric. Technol. 2022, 3, 100108. [Google Scholar] [CrossRef]
- Divyanth, L.G.; Marzougui, A.; González-Bernal, M.J.; McGee, R.J.; Rubiales, D.; Sankaran, S. Evaluation of Effective Class-Balancing Techniques for CNN-Based Assessment of Aphanomyces Root Rot Resistance in Pea (Pisum Sativum L.). Sensors 2022, 22, 7237. [Google Scholar] [CrossRef]
- Moazzam, S.I.; Khan, U.S.; Tiwana, M.I.; Iqbal, J.; Qureshi, W.S.; Shah, S.I. A Review of Application of Deep Learning for Weeds and Crops Classification in Agriculture. In Proceedings of the 2019 International Conference on Robotics and Automation in Industry (ICRAI), Rawalpindi, Pakistan, 21–22 October 2019. [Google Scholar] [CrossRef]
- Divyanth, L.G.; Chelladurai, V.; Loganathan, M.; Jayas, D.S.; Soni, P. Identification of Green Gram (Vigna Radiata) Grains Infested by Callosobruchus Maculatus Through X-ray Imaging and GAN-Based Image Augmentation. J. Biosyst. Eng. 2022, 47, 302–317. [Google Scholar] [CrossRef]
- Fu, L.; Majeed, Y.; Zhang, X.; Karkee, M.; Zhang, Q. Faster R–CNN–Based Apple Detection in Dense-Foliage Fruiting-Wall Trees Using RGB and Depth Features for Robotic Harvesting. Biosyst. Eng. 2020, 197, 245–256. [Google Scholar] [CrossRef]
- Gao, F.; Fu, L.; Zhang, X.; Majeed, Y.; Li, R.; Karkee, M.; Zhang, Q. Multi-Class Fruit-on-Plant Detection for Apple in SNAP System Using Faster R-CNN. Comput. Electron. Agric. 2020, 176, 105634. [Google Scholar] [CrossRef]
- Zhang, L.; Jia, J.; Gui, G.; Hao, X.; Gao, W.; Wang, M. Deep Learning Based Improved Classification System for Designing Tomato Harvesting Robot. IEEE Access 2018, 6, 67940–67950. [Google Scholar] [CrossRef]
- Lamb, N.; Chuah, M.C. A Strawberry Detection System Using Convolutional Neural Networks. In Proceedings of the 2018 IEEE International Conference on Big Data (Big Data), Seattle, WA, USA, 10–13 December 2019; pp. 2515–2520. [Google Scholar] [CrossRef]
- Ranjan, A.; Machavaram, R. Detection and Localisation of Farm Mangoes Using YOLOv5 Deep Learning Technique. In Proceedings of the 2022 IEEE 7th International Conference for Convergence in Technology (I2CT), Mumbai, India, 7–9 April 2022. [Google Scholar] [CrossRef]
- Fu, L.; Feng, Y.; Majeed, Y.; Zhang, X.; Zhang, J.; Karkee, M.; Zhang, Q. Kiwifruit Detection in Field Images Using Faster R-CNN with ZFNet. IFAC-PapersOnLine 2018, 51, 45–50. [Google Scholar] [CrossRef]
- Ni, X.; Li, C.; Jiang, H.; Takeda, F. Three-Dimensional Photogrammetry with Deep Learning Instance Segmentation to Extract Berry Fruit Harvestability Traits. ISPRS J. Photogramm. Remote Sens. 2021, 171, 297–309. [Google Scholar] [CrossRef]
- Zhao, C.; Lee, W.S.; He, D. Immature Green Citrus Detection Based on Colour Feature and Sum of Absolute Transformed Difference (SATD) Using Colour Images in the Citrus Grove. Comput. Electron. Agric. 2016, 124, 243–253. [Google Scholar] [CrossRef]
- Kapach, K.; Barnea, E.; Mairon, R.; Edan, Y.; Ben-Shahar, O. Computer Vision for Fruit Harvesting Robots—State of the Art and Challenges Ahead. Int. J. Comput. Vis. Robot. 2012, 3, 4–34. [Google Scholar] [CrossRef] [Green Version]
- Ukwuoma, C.C.; Zhiguang, Q.; Bin Heyat, M.B.; Ali, L.; Almaspoor, Z.; Monday, H.N. Recent Advancements in Fruit Detection and Classification Using Deep Learning Techniques. Math. Probl. Eng. 2022, 2022, 9210947. [Google Scholar] [CrossRef]
- Gongal, A.; Amatya, S.; Karkee, M.; Zhang, Q.; Lewis, K. Sensors and Systems for Fruit Detection and Localization: A Review. Comput. Electron. Agric. 2015, 116, 8–19. [Google Scholar] [CrossRef]
- Sa, I.; Ge, Z.; Dayoub, F.; Upcroft, B.; Perez, T.; McCool, C. DeepFruits: A Fruit Detection System Using Deep Neural Networks. Sensors 2016, 16, 1222. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gené-Mola, J.; Vilaplana, V.; Rosell-Polo, J.R.; Morros, J.R.; Ruiz-Hidalgo, J.; Gregorio, E. Multi-Modal Deep Learning for Fuji Apple Detection Using RGB-D Cameras and Their Radiometric Capabilities. Comput. Electron. Agric. 2019, 162, 689–698. [Google Scholar] [CrossRef]
- Wan, S.; Goudos, S. Faster R-CNN for Multi-Class Fruit Detection Using a Robotic Vision System. Comput. Networks 2020, 168, 107036. [Google Scholar] [CrossRef]
- Parvathi, S.; Tamil Selvi, S. Detection of Maturity Stages of Coconuts in Complex Background Using Faster R-CNN Model. Biosyst. Eng. 2021, 202, 119–132. [Google Scholar] [CrossRef]
- Bao, W.; Yang, X.; Liang, D.; Hu, G.; Yang, X. Lightweight Convolutional Neural Network Model for Field Wheat Ear Disease Identification. Comput. Electron. Agric. 2021, 189, 106367. [Google Scholar] [CrossRef]
- Kang, J.; Liu, L.; Zhang, F.; Shen, C.; Wang, N.; Shao, L. Semantic Segmentation Model of Cotton Roots In-Situ Image Based on Attention Mechanism. Comput. Electron. Agric. 2021, 189, 106370. [Google Scholar] [CrossRef]
- Dong, S.; Wang, R.; Liu, K.; Jiao, L.; Li, R.; Du, J.; Teng, Y.; Wang, F. CRA-Net: A Channel Recalibration Feature Pyramid Network for Detecting Small Pests. Comput. Electron. Agric. 2021, 191, 106518. [Google Scholar] [CrossRef]
- Li, X.; Pan, J.; Xie, F.; Zeng, J.; Li, Q.; Huang, X.; Liu, D.; Wang, X. Fast and Accurate Green Pepper Detection in Complex Backgrounds via an Improved Yolov4-Tiny Model. Comput. Electron. Agric. 2021, 191, 106503. [Google Scholar] [CrossRef]
- Wang, D.; He, D. Channel Pruned YOLO V5s-Based Deep Learning Approach for Rapid and Accurate Apple Fruitlet Detection before Fruit Thinning. Biosyst. Eng. 2021, 210, 271–281. [Google Scholar] [CrossRef]
- Zeng, W.; Li, M. Crop Leaf Disease Recognition Based on Self-Attention Convolutional Neural Network. Comput. Electron. Agric. 2020, 172, 105341. [Google Scholar] [CrossRef]
- Gao, R.; Wang, R.; Feng, L.; Li, Q.; Wu, H. Dual-Branch, Efficient, Channel Attention-Based Crop Disease Identification. Comput. Electron. Agric. 2021, 190, 106410. [Google Scholar] [CrossRef]
- Xia, X.; Chai, X.; Zhang, N.; Sun, T. Visual Classification of Apple Bud-Types via Attention-Guided Data Enrichment Network. Comput. Electron. Agric. 2021, 191, 106504. [Google Scholar] [CrossRef]
- Mu, Y.; Chen, T.S.; Ninomiya, S.; Guo, W. Intact Detection of Highly Occluded Immature Tomatoes on Plants Using Deep Learning Techniques. Sensors 2020, 20, 2984. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; Paliwal, J. Spectral Data Compression and Analyses Techniques to Discriminate Wheat Classes. Trans. ASABE 2006, 49, 1607–1612. [Google Scholar] [CrossRef]
- Mebatsion, H.K.; Paliwal, J. A Fourier Analysis Based Algorithm to Separate Touching Kernels in Digital Images. Biosyst. Eng. 2011, 108, 66–74. [Google Scholar] [CrossRef]
- Lu, J.; Sang, N. Detecting Citrus Fruits and Occlusion Recovery under Natural Illumination Conditions. Comput. Electron. Agric. 2015, 110, 121–130. [Google Scholar] [CrossRef]
- Natarajan, S.; Ponnusamy, V. Agri-Food Products Quality Assessment Methods. In Computer Vision and Machine Learning in Agriculture; Algorithms for Intelligent Systems; Uddin, M.S., Bansal, J.C., Eds.; Springer: Singapore, 2022; Volume 2. [Google Scholar] [CrossRef]
- Hosainpour, A.; Kheiralipour, K.; Nadimi, M.; Paliwal, J. Quality assessment of dried white mulberry (Morus alba L.) using machine vision. Horticulturae 2022, 8, 1011. [Google Scholar] [CrossRef]
- Li, X.; Guillermic, R.M.; Nadimi, M.; Paliwal, J.; Koksel, F. Physical and microstructural quality of extruded snacks made from blends of barley and green lentil flours. Cereal Chem. 2022, 99, 1112–1123. [Google Scholar] [CrossRef]
- Sivakumar, C.; Chaudhry, M.M.A.; Nadimi, M.; Paliwal, J.; Courcelles, J. Characterization of Roller and Ferkar-Milled Pulse Flours Using Laser Diffraction and Scanning Electron Microscopy. Powder Technol. 2022, 409, 117803. [Google Scholar] [CrossRef]
- Sabzi, S.; Abbaspour, Y.; Nadimi, M.; Paliwal, J. Non-destructive estimation of physicochemical properties and detection of ripeness level of apples using machine vision. Int. J. Fruit Sci. 2022, 22, 628–645. [Google Scholar] [CrossRef]
- Divyanth, L.G.; Guru, D.S.; Soni, P.; Machavaram, R.; Nadimi, M.; Paliwal, J. Image-to-Image Translation-Based Data Augmentation for Improving Crop/Weed Classification Models for Precision Agriculture Applications. Algorithms 2022, 15, 401. [Google Scholar] [CrossRef]
- Nadimi, M.; Loewen, G.; Paliwal, J. Assessment of Mechanical Damage to Flaxseeds Using Radiographic Imaging and To-mography. Smart Agric. Technol. 2022, 2, 100057. [Google Scholar] [CrossRef]
- Nadimi, M.; Divyanth, L.G.; Paliwal, J. Automated detection of mechanical damage in flaxseeds using radiographic imaging and machine learning. Foods Bioprocess Technol. 2022. [Google Scholar] [CrossRef]
- Kheiralipour, K.; Nadimi, M.; Paliwal, J. Development of an Intelligent Imaging System for Ripeness Determination of Wild Pistachios. Sensors 2022, 22, 7134. [Google Scholar] [CrossRef] [PubMed]
- Ouhami, M.; Hafiane, A.; Es-Saady, Y.; El Hajji, M.; Canals, R. Computer Vision, IoT and Data Fusion for Crop Disease Detection Using Machine Learning: A Survey and Ongoing Research. Remote Sens. 2021, 13, 2486. [Google Scholar] [CrossRef]
- Nadimi, M.; Brown, J.M.; Morrison, J.; Paliwal, J. Examination of wheat kernels for the presence of Fusarium damage and mycotoxins using near-infrared hyperspectral imaging. Meas. Food 2021, 4, 100011. [Google Scholar] [CrossRef]
- Erkinbaev, C.; Nadimi, M.; Paliwal, J. A Unified Heuristic Approach to Simultaneously Detect Fusarium and Ergot Damage in Wheat. Meas. Food 2022, 7, 100043. [Google Scholar] [CrossRef]
- Ruangurai, P.; Dailey, M.N.; Ekpanyapong, M.; Soni, P. Optimal Vision-Based Guidance Row Locating for Autonomous Agricultural Machines. Precis. Agric. 2022, 23, 1205–1225. [Google Scholar] [CrossRef]
- Sirikun, C.; Samseemoung, G.; Soni, P.; Langkapin, J.; Srinonchat, J. A Grain Yield Sensor for Yield Mapping with Local Rice Combine Harvester. Agric. 2021, 11, 897. [Google Scholar] [CrossRef]
- Nadimi, M.; Loewen, G.; Bhowmik, P.; Paliwal, J. Effect of laser biostimulation on germination of sub-optimally stored flaxseeds (Linum usitatissimum). Sustainability 2022, 14, 12183. [Google Scholar] [CrossRef]
- Nadimi, M.; Sun, D.W.; Paliwal, J. Effect of laser biostimulation on germination of wheat. ASABE Appl. Eng. Agric. 2022, 38, 77–84. [Google Scholar] [CrossRef]
- Nadimi, M.; Sun, D.W.; Paliwal, J. Recent applications of novel laser techniques for enhancing agricultural production. Laser Phys. 2021, 31, 053001. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Class | Number of Coconut Clusters | Total Number of Coconut Clusters in the Class (in Complete Dataset) | ||
|---|---|---|---|---|
| Training | Validation | Test | ||
| Non-occluded coconut clusters | 7674 | 2220 | 2310 | 12,204 |
| Leaf-occluded coconut clusters | 11,250 | 2856 | 2814 | 16,920 |
| Total | 18,924 | 5076 | 5124 | 29,124 |
| Hyperparameter | Value |
|---|---|
| Optimizer | Stochastic gradient descent with momentum (sgdm) |
| Initial learn rate | 0.001 |
| Maximum epochs | 1000 |
| Mini batch size | 32 |
| Learn rate drop factor | 0.0005 |
| Learn rate drop period | 10 |
| Momentum | 0.9 |
| mIoU | Average Precision (AP) | |||
|---|---|---|---|---|
| Validation | Test | Validation | Test | |
| Non-occluded coconuts | 0.906 | 0.895 | 0.924 | 0.912 |
| Leaf-occluded coconuts | 0.812 | 0.807 | 0.899 | 0.883 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Divyanth, L.G.; Soni, P.; Pareek, C.M.; Machavaram, R.; Nadimi, M.; Paliwal, J. Detection of Coconut Clusters Based on Occlusion Condition Using Attention-Guided Faster R-CNN for Robotic Harvesting. Foods 2022, 11, 3903. https://doi.org/10.3390/foods11233903
Divyanth LG, Soni P, Pareek CM, Machavaram R, Nadimi M, Paliwal J. Detection of Coconut Clusters Based on Occlusion Condition Using Attention-Guided Faster R-CNN for Robotic Harvesting. Foods. 2022; 11(23):3903. https://doi.org/10.3390/foods11233903
Chicago/Turabian StyleDivyanth, L. G., Peeyush Soni, Chaitanya Madhaw Pareek, Rajendra Machavaram, Mohammad Nadimi, and Jitendra Paliwal. 2022. "Detection of Coconut Clusters Based on Occlusion Condition Using Attention-Guided Faster R-CNN for Robotic Harvesting" Foods 11, no. 23: 3903. https://doi.org/10.3390/foods11233903