
Evaluation of Multiresolution Digital Elevation Model (DEM) from Real-Time Kinematic GPS and Ancillary Data for Reservoir Storage Capacity Estimation

Abstract
:1. Introduction
2. Brief Review on Reservoir Storage Capacity Estimation
3. Study Area: Kesses Reservoir in Uasin Gishu County in Kenya
4. Real-Time Kinematic GPS Technique and DTM Generation Principle
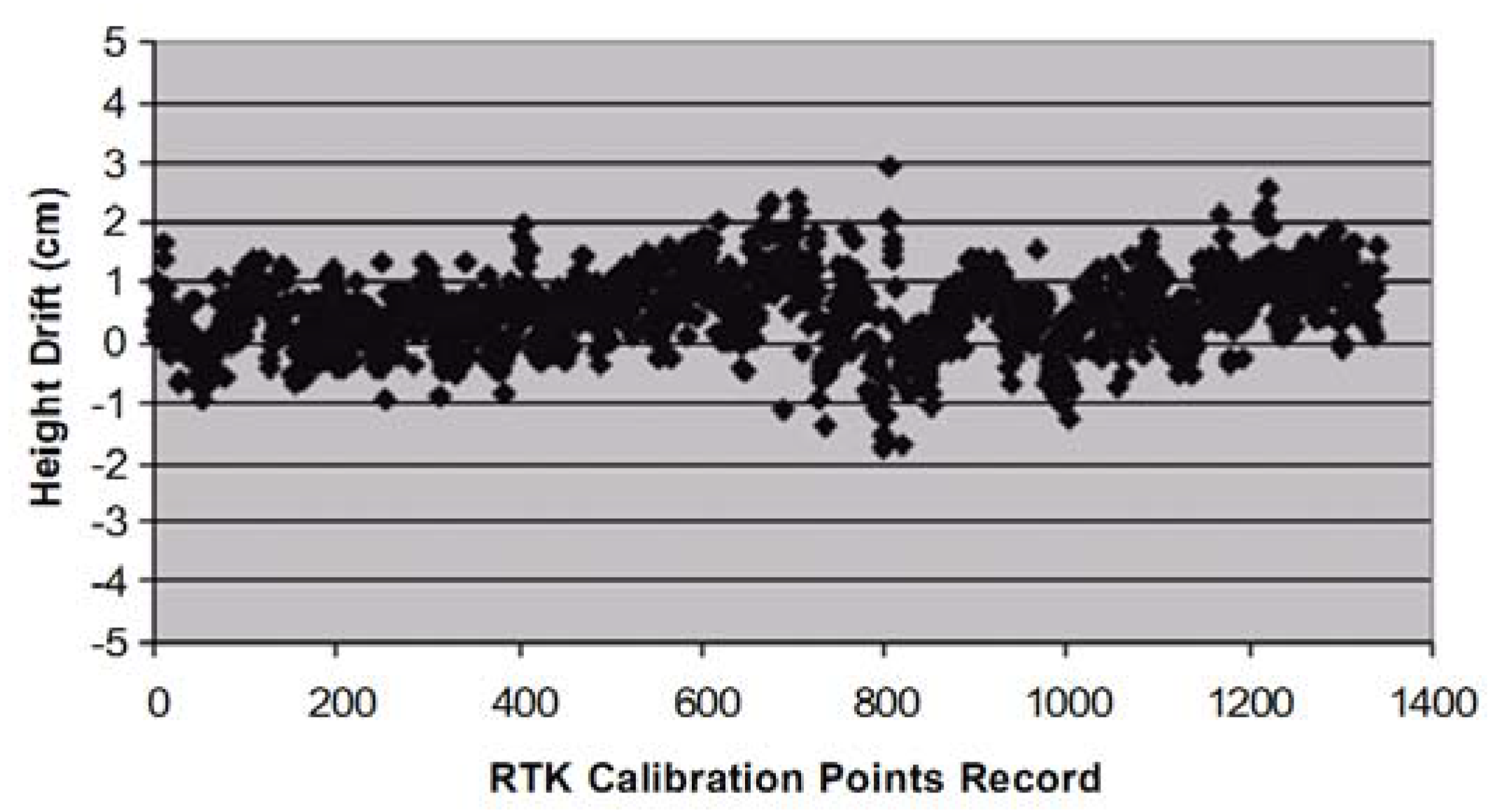
4.1. Testing of RTK-GPS Field Measurements
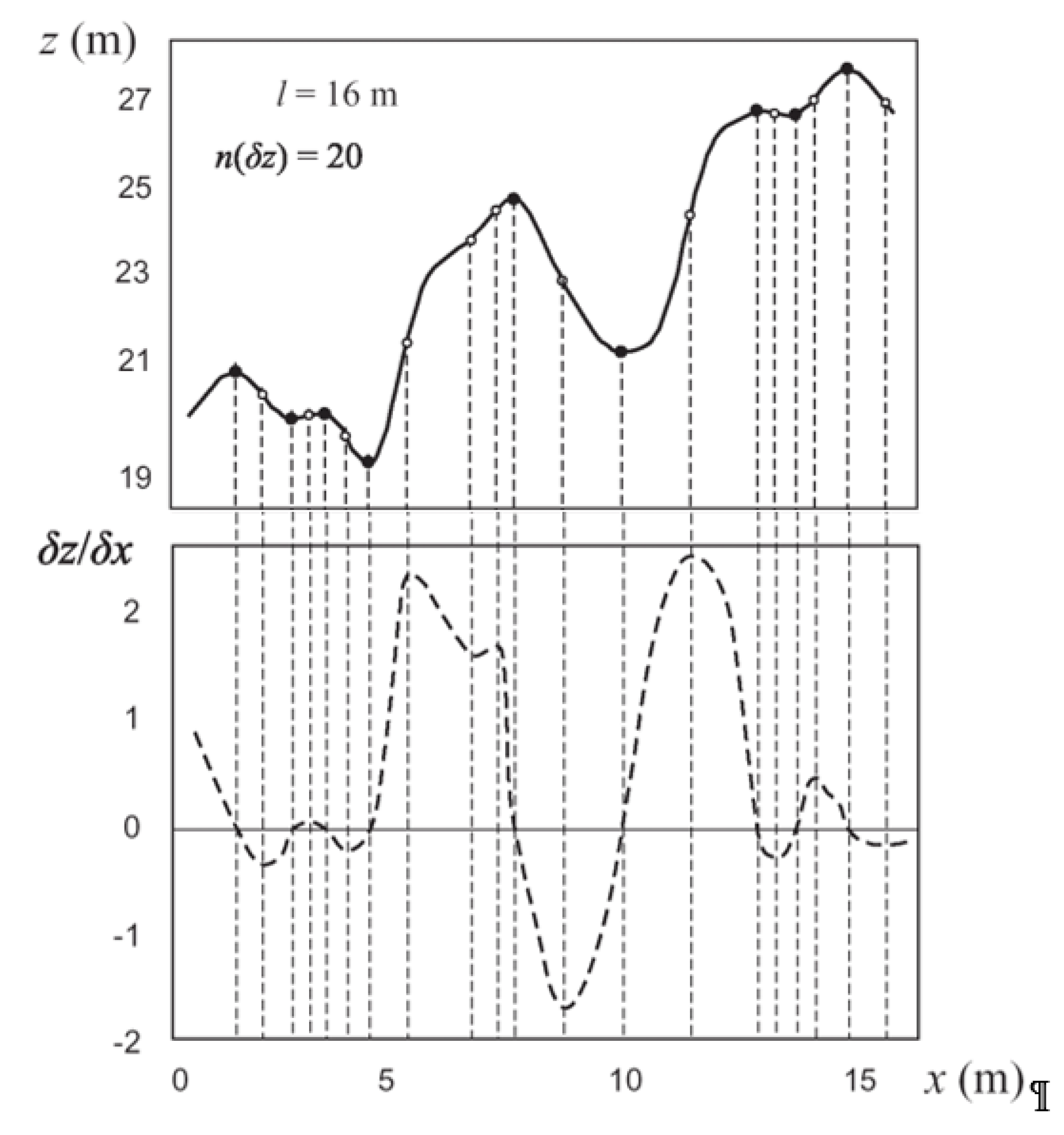
4.2. Selecting Suitable Grid-Size for DEM Generation Using RTK-GPS Surveys
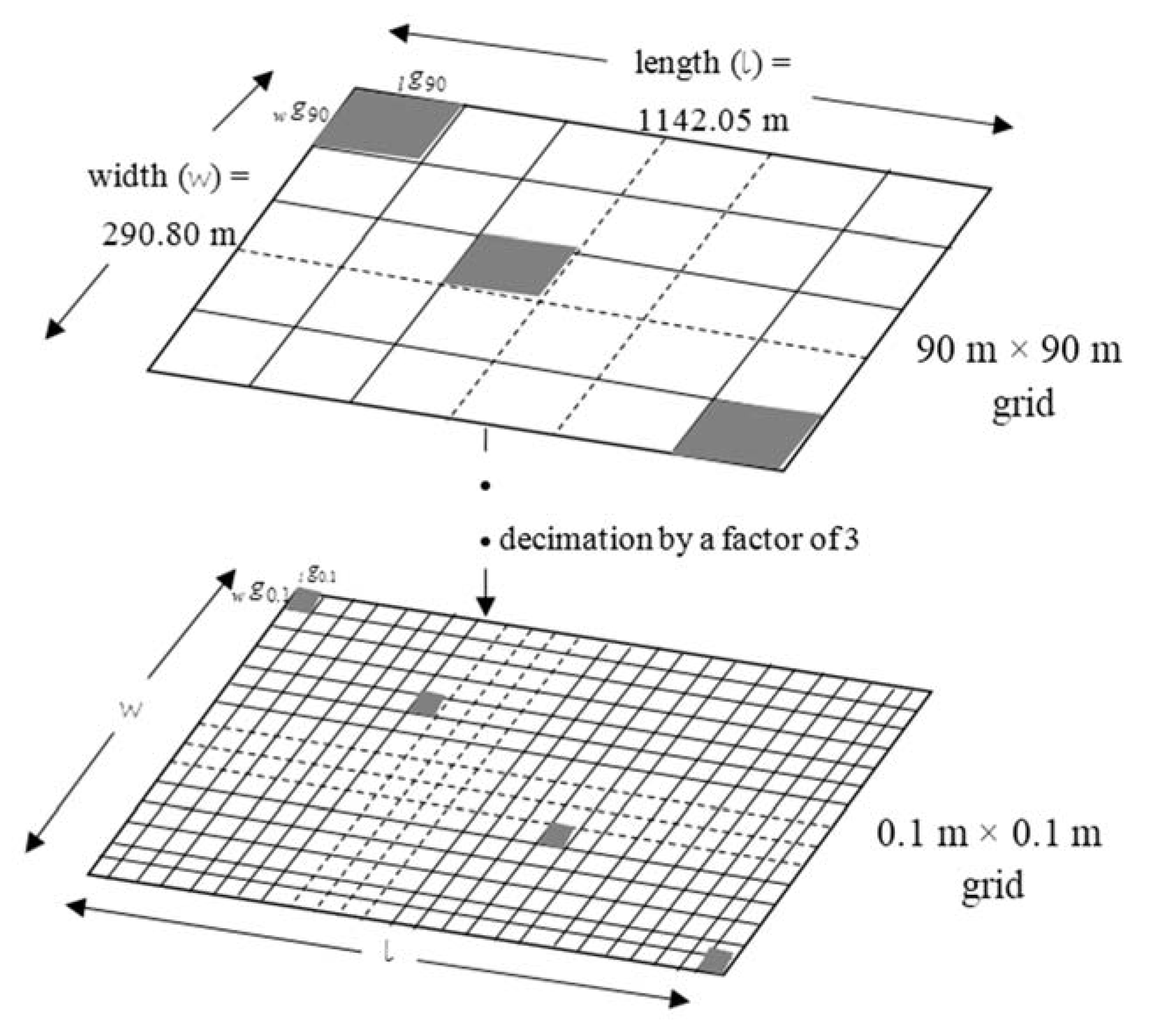
4.3. Uncertainty and Error Analysis for Optimal RTK-GPS Point Density
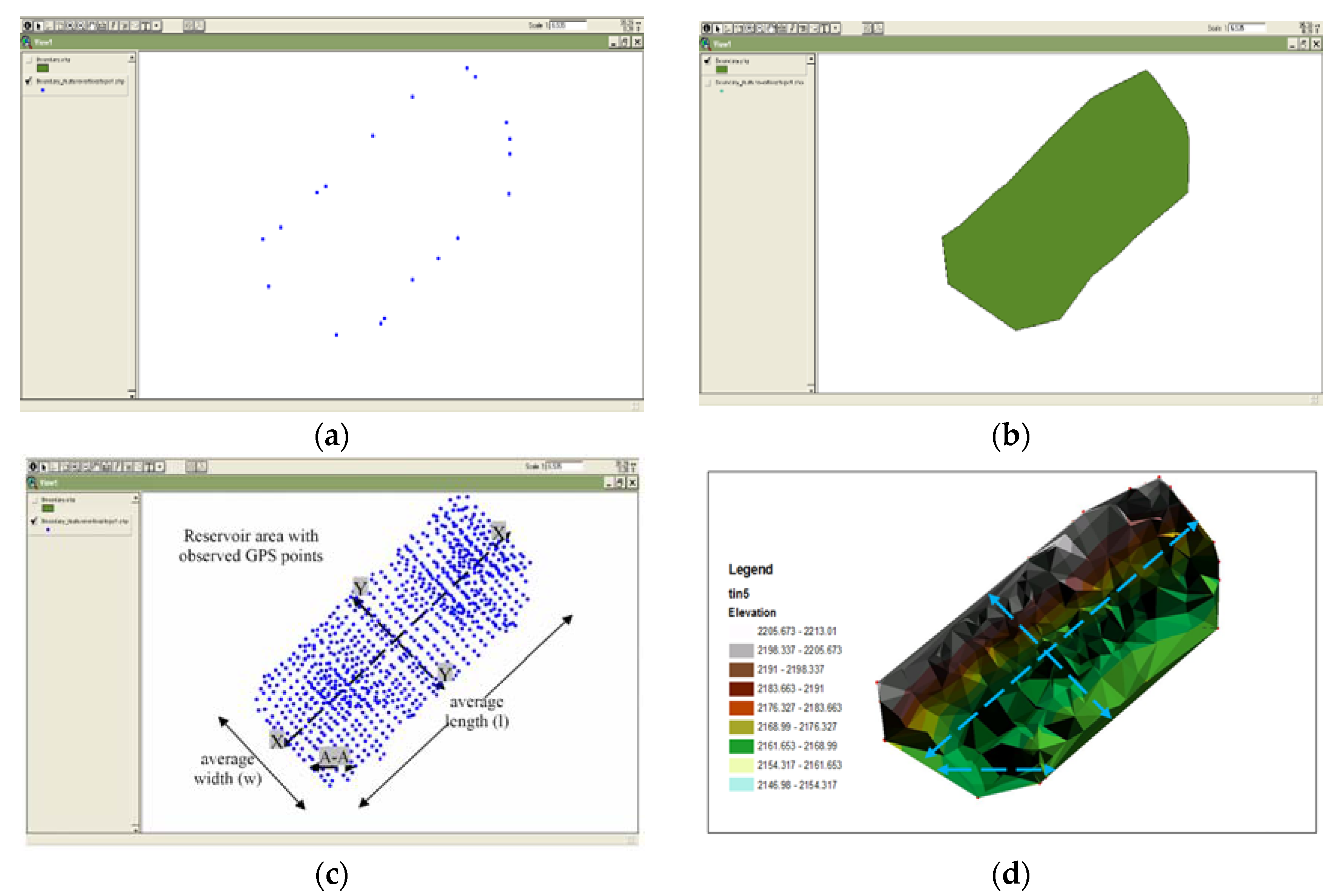
4.4. Procedure for Generation of the Proposed Reservoir Elevation Points
4.5. DEM Uncertainty and Error Analysis
5. Estimation of Proposed Reservoir Surface Geometric Parameters from RTK-GPS Observations
5.1. Reservoir Slope Derivation from DEM
5.2. Reservoir Surface Area Computation Using Surface to Horizontal Area Ratio (SHAR) Based on Terrain Slope
5.3. Reservoir Cross-Sections and Long-Sections
6. Comparative Evaluation of Reservoir Storage Curve Determination
6.1. On the Influence of Sampling Point Density on Reservoir Storage Volumetric Computations
6.2. Reservoir Volume-Depth Estimation
6.3. Storage Capacity-Area Power Relationship
6.4. Reservoir 3D Storage Capacity Simulation
6.5. Validation of the Proposed Model with in Situ Data
7. Results and Discussion
- (a)
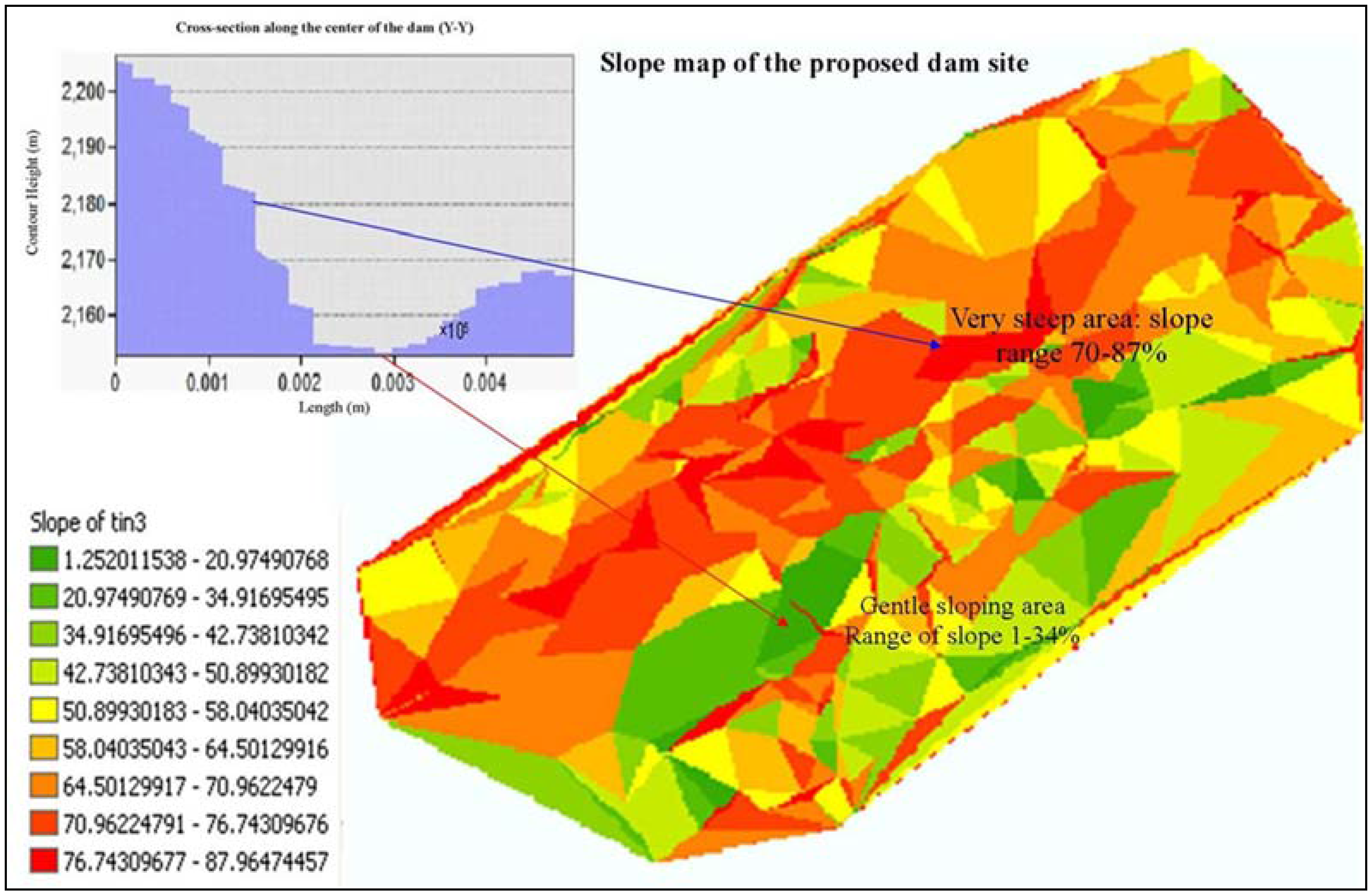
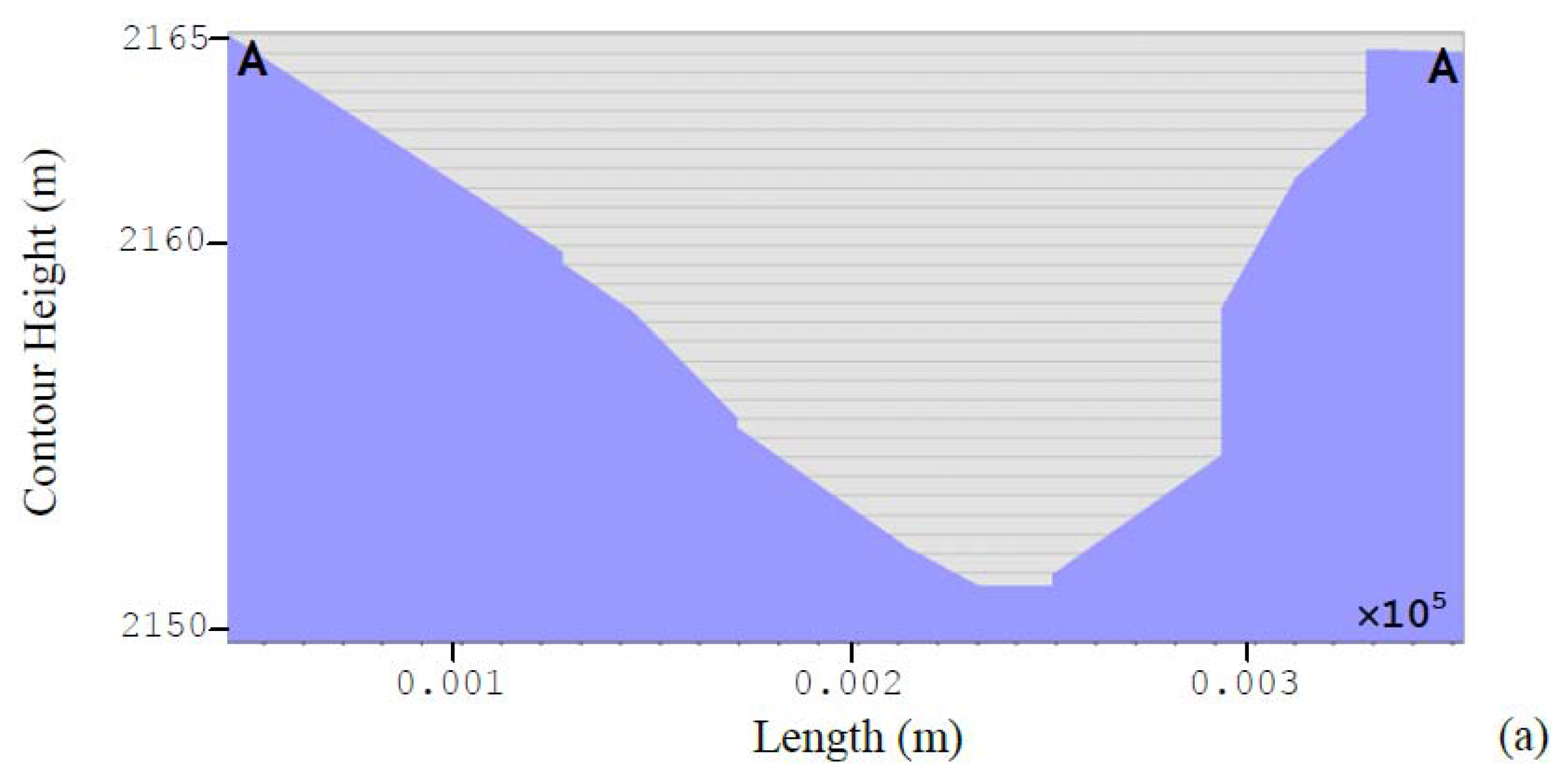
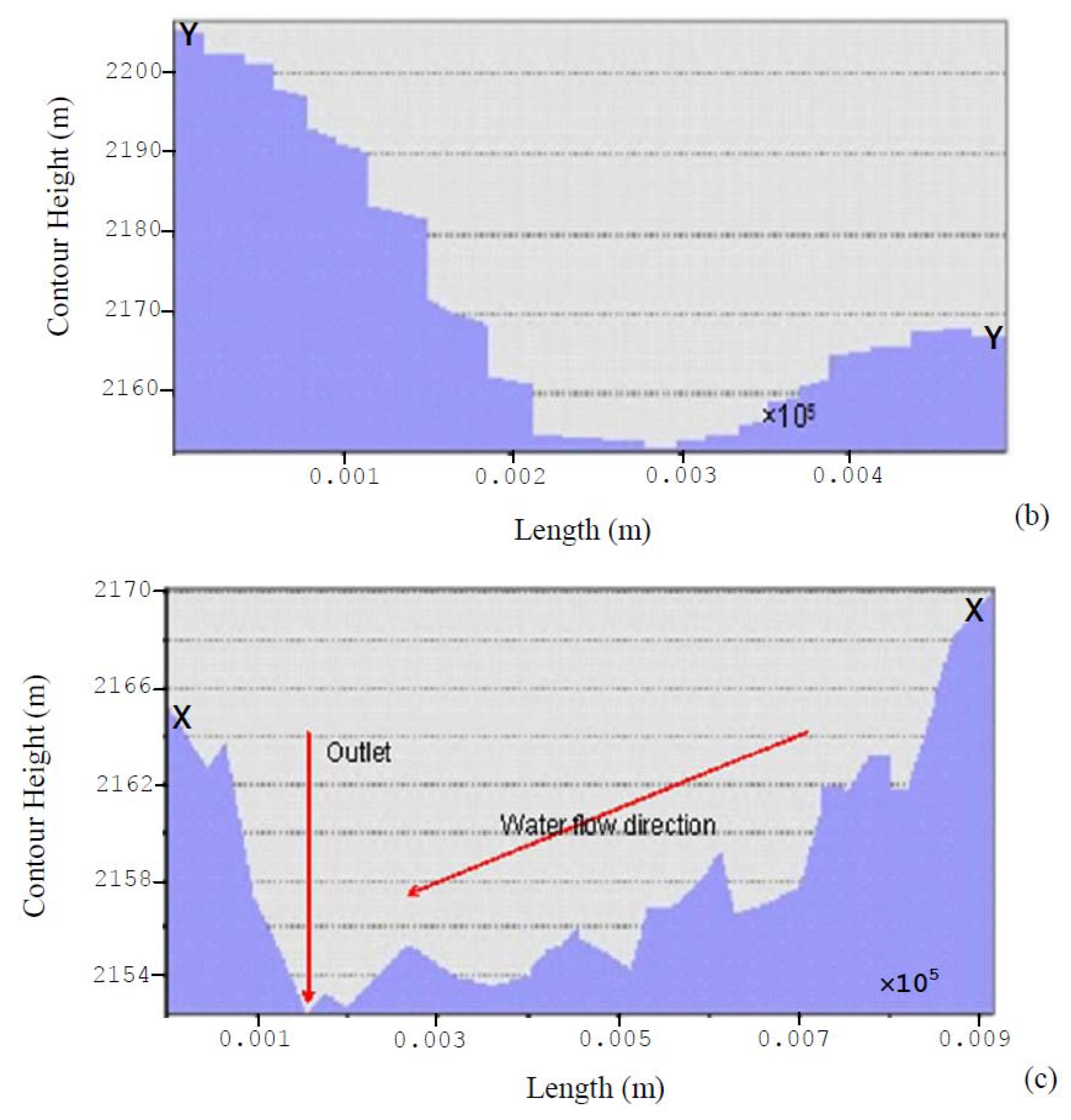
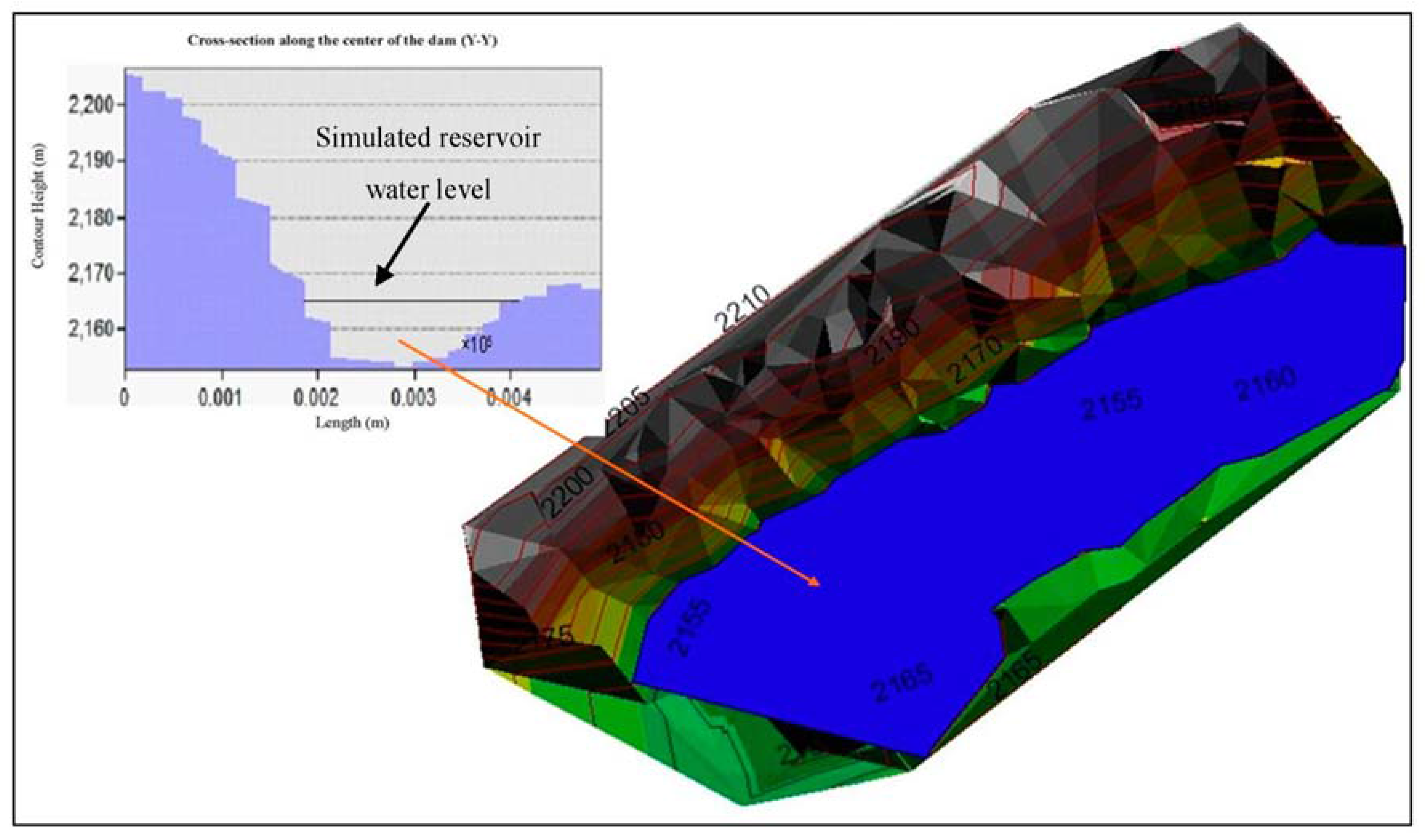
- Reservoir topography and dam site selection: The slope results show that the proposed reservoir site has a uniform steep-slope, which is suitable in supporting the reservoir embankments. Under ideal conditions, the dam should be located in the narrow sections of the river, just downstream of relatively wide stretch, and with minimal slope angles. This condition requires narrow valley stretches with relatively steep sides up to the required water level, above which one of the embankments flattens considerably. With this consideration, the cross-section along the reservoir axis A-A (Figure 11a), and as depicted in the inset in Figure 15, was suggested as the suitable dam site for the proposed reservoir.Further, the inclinations of the surfaces from the terrain aspect, shows that there are three major slope directions in this area. These directions form a V-shaped configuration which represents the suitability of the proposed site as being a basin, enabling the retention of water over longer temporal intervals and provides the catchment outlet in a narrow valley that is suitable for locating the dam axis.
- (b)
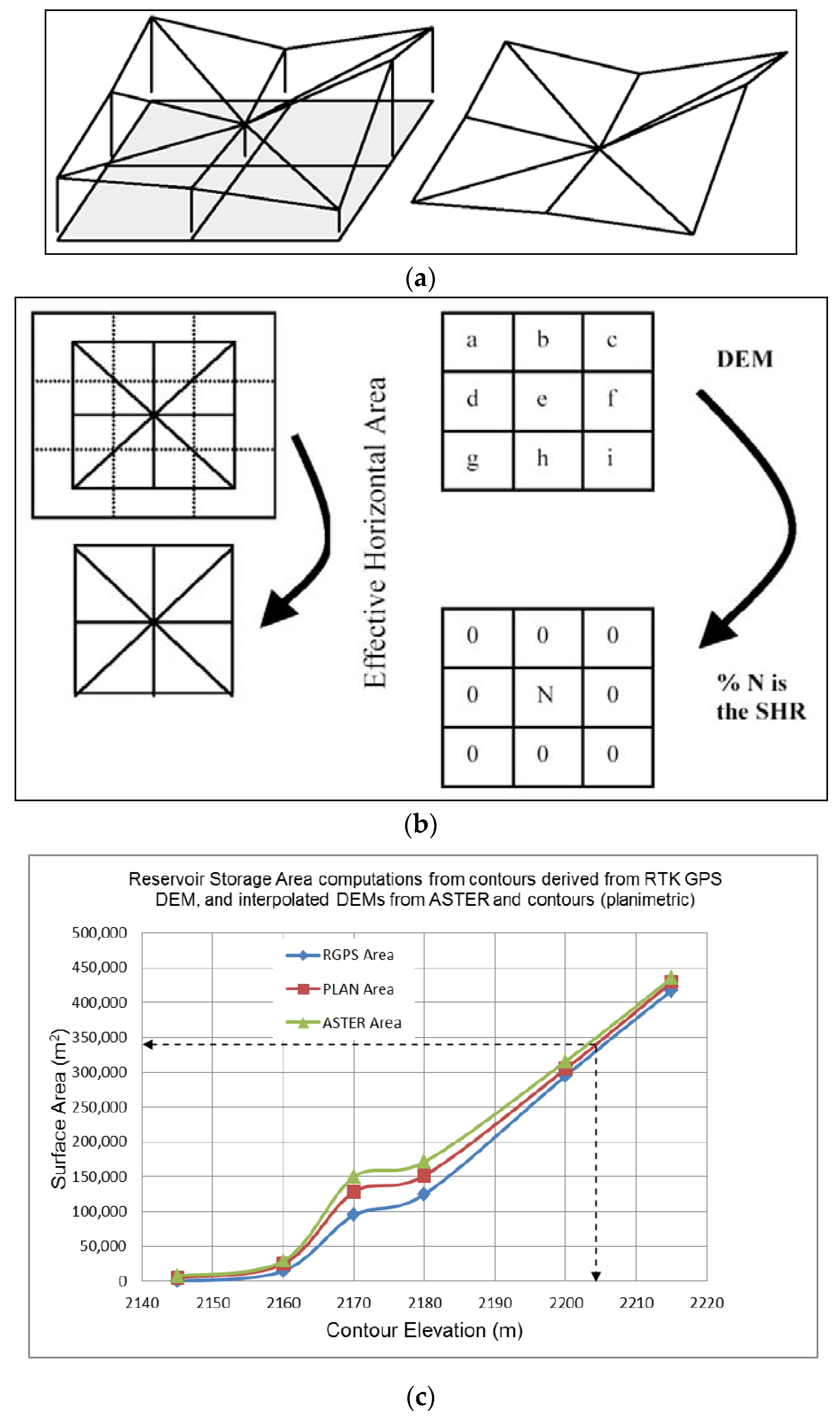
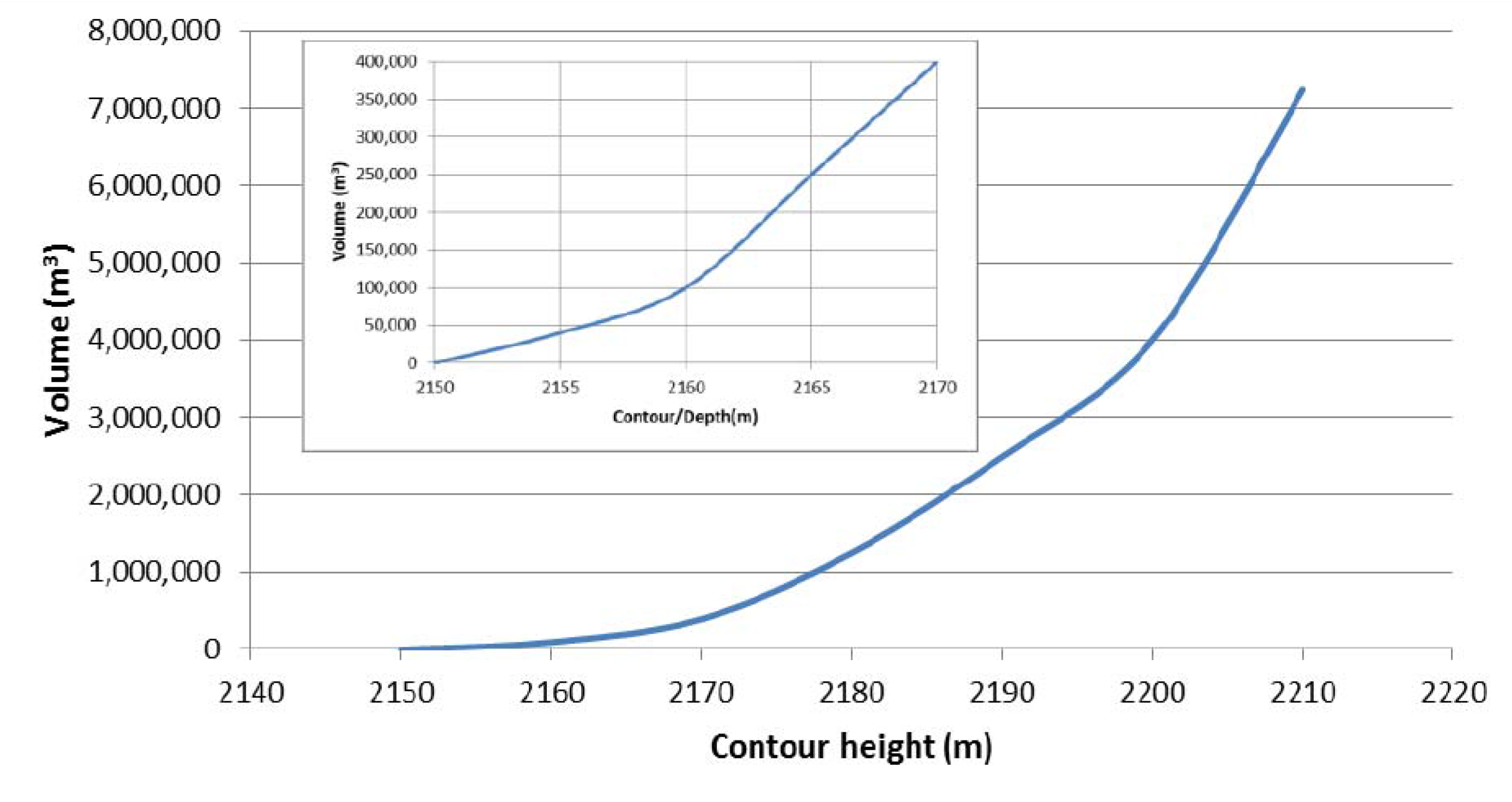
- Size of the catchment area and area of proposed reservoir: For sustainable water supply, it is required that the catchment or watershed area should be large enough to ensure replenishment of the reservoir even in moderately dry seasons. Considering the entire catchment area, the reservoir will receive most of its waters from the existing Kesses reservoir I.The study results show that the surface areas increase with increase in contour height. This is expected to be so because the land does not slant vertically, but is gradually inclined with a mean slope angle of 41.5°. Based on the results, if the maximum contour depth difference is set to be 20 m, then the corresponding water surface area and capacity can be monitored from the resulting V-A and V-D plots.
- (c)
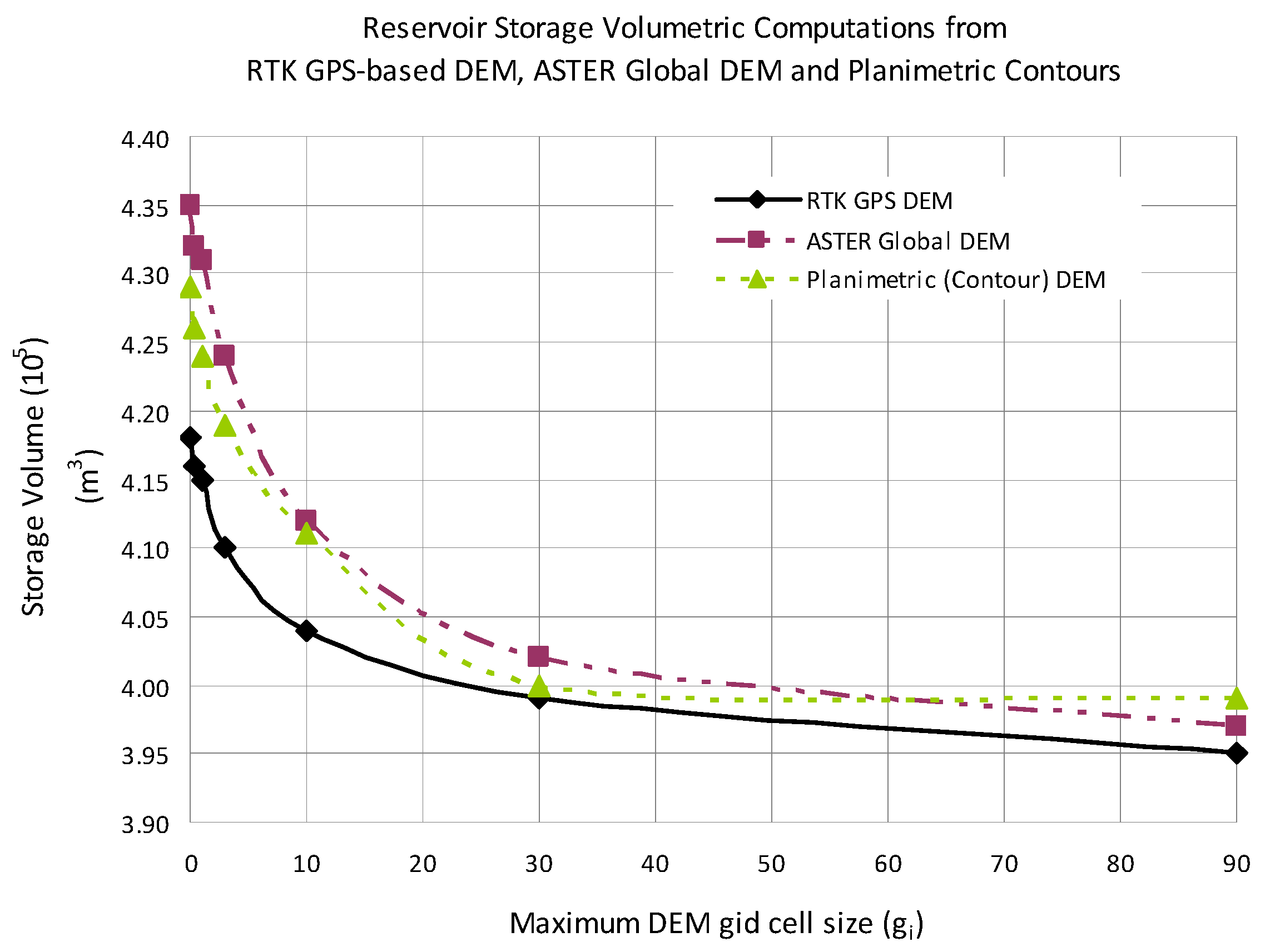
- Quality of DEM generation: The results and discussions in (a) and (b) above are based on the RTK-GPS generated DEM. These results shows that the quality of a DEM is dependent on a number of interrelated factors, such as the methods of data acquisition, the nature of the input data, and the methods employed in generating the DEMs [38]. Notably, the higher values of the storage volumes determined from the ASTER DEM and planimetric contour interpolation, as compared to the RTK-GPS observations could be attributed to the fact that the interpolation procedures for DEM generation in the former data sets are generally not accurate.Based on the results from this study, the DEM data spatial resolution and point distribution is the most critical factor as depicted in Figure 17. Figure 17 illustrates the significances of different spatial resolutions on detail representation (Figure 17a–d), and the corresponding 3D terrain geometric computations, e.g., slope (Figure 17e). In Figure 17f, the 10 m DEM (i) depict slopes from 10° to areas of greater than 50°. The 30 m DEM (ii) represents highest slope, in this example, greater than 30°, while the 90 m DEM (iii) shows only slopes of no more than 20°. These disparities in slope calculations clearly imply that the spatial resolution of a DEM is critical in capturing the terrain derivatives. The observation in Figure 17 confirms the proposed mathematical correlation between the storage volume and the smallest size of pixel representing the DEM terrain as expressed in the proposed model in Equation (10).
- (d)
- Correlation between DEM uncertainty, accuracy and GPS point density: Uncertainty and error analysis using root-mean-square-error showed that the inherent errors in DEM were mainly due to the data acquisition process, source and the interpolation process. The results showed that high uncertainty and therefore DEM error tended to concentrate in rugged terrain areas, especially when the densities were high (corresponding to high grid cell sizes). On the variability of the topography and DEM resolution, it is noted that even in naturally varying topography, it may not be accurate to generalize that the lower the grid size, the more accurate the results will be. Rather, this should be dependent on a specific scene and also on the morphologic features of interest.
- (e)
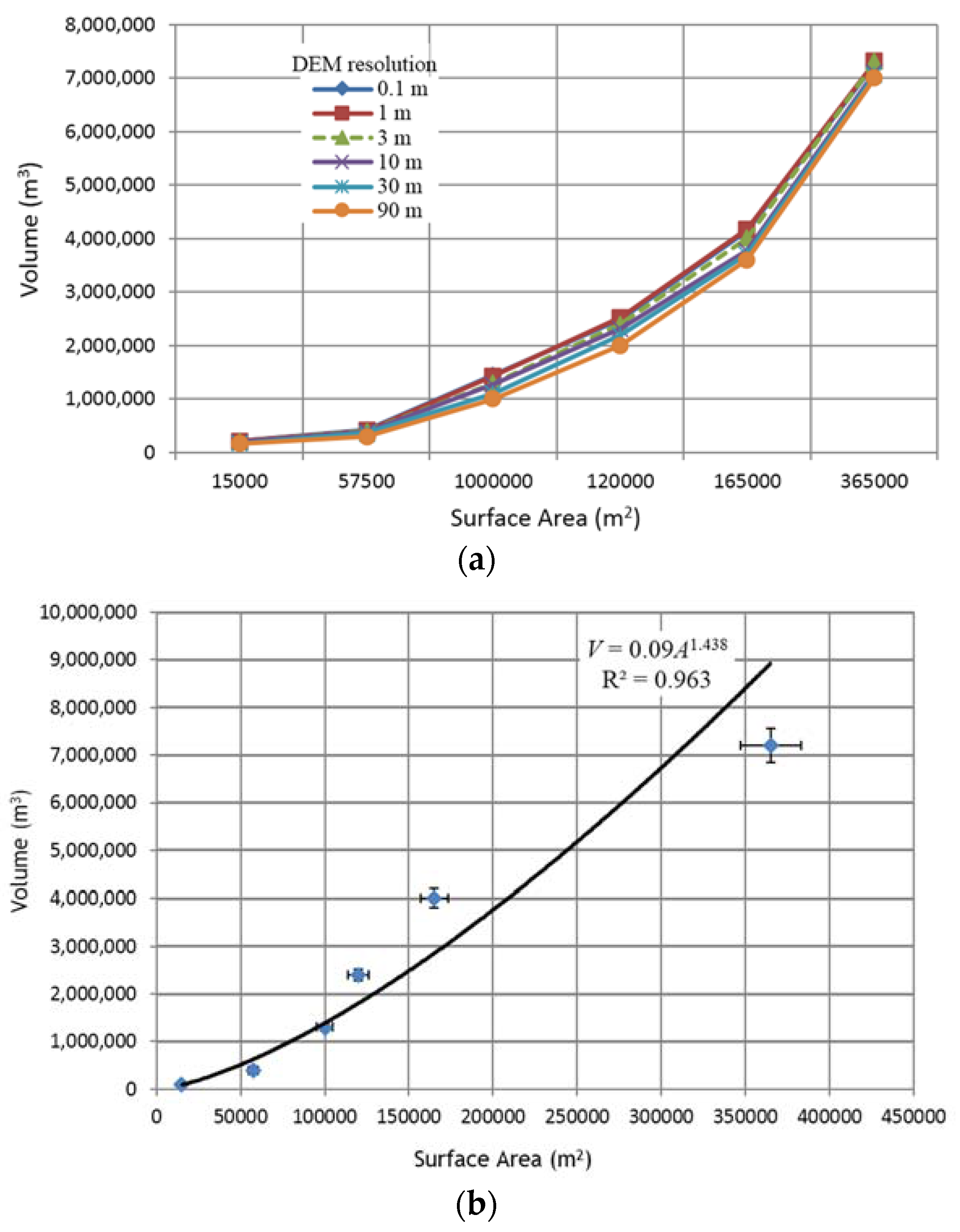
- On the relationship between elevation and GPS point density for optimal DEM determination: From the results in Figure 10, it is observed that the surface area computation results for the three DEM data sources do not deviate so much from each other, with RTK-GPS results consistently giving a lower bound estimate of the reservoir surface area. The same consistency is observed in Figure 12, with saturation in the reservoir volume being observed at 30 m × 30 m grid resolution. In Figure 12, a higher storage capacity is observed between 0.1 m and 3 m. The results in Table 4 confirm that 0.1 m to 1 m grid sizes may overestimate the proposed reservoir storage capacity and this is also observed the in the RMSE results in Table 2. The results in Figure 10 imply that for more accurate surface area determination, the higher grid density is more suitable in nearly smooth and natural terrain. This is because DEM grid sizes and the corresponding reservoir surface areas tend to reach a peak beyond which further potential reservoir storage information may not be feasible. The implication is that there is a corresponding linear relationship between the surface area-elevation (Figure 10) and the volume-GPS DEM point density (Figure 12), which are important in the derivation of the V-D power curve as systematically derived in Section 6.1 above.
8. Summary and Conclusions
Acknowledgments
Conflicts of Interest
References
- Guo, S.L.; Zhang, H.G.; Chen, H.; Peng, D.Z.; Liu, P.; Pang, B. A reservoir flood forecasting and control system for China. Hydrol. Sci. J. 2004, 49, 959–972. [Google Scholar] [CrossRef]
- Keller, A.A.; Sakthivadivel, R.; Seckler, D. Water Scarcity and the Role of Storage in Development; IWMI Research Report 039; International Water Management Institute: Colombo, Sri Lanka, 2000. [Google Scholar]
- Van der Zaag, P.; Gupta, J. Scale issues in the governance of water storage projects. Water Resour. Res. 2008, 44. [Google Scholar] [CrossRef]
- Hayashi, M.; van der Kamp, G. Simple equations to represent the volume–area–depth relations of shallow wetlands in small topographic depressions. J. Hydrol. 2000, 237, 74–85. [Google Scholar] [CrossRef]
- Mongus, D.; Zalik, B. Parameter-free ground filtering of LiDAR data for automatic DTM generation. ISPRS J. Photogramm. Remote Sens. 2012, 67, 1–12. [Google Scholar] [CrossRef]
- Wang, L.; Yu, J. Modeling detention basins measured from high resolution LiDAR data. Hydrol. Process. 2012, 26, 2973–2984. [Google Scholar] [CrossRef]
- Magome, J.; Ishidaira, H.; Takeuchi, K. Method for satellite monitoring of water storage in reservoirs for efficient regional water management. In Water Resources System—Hydrological Risk, Management and Development; Bloschl, G., Franks, S., Kumagai, M., Musiake, K., Rosbjerg, D., Eds.; IAHS Publ.: Sapporo, Japan, 2003; pp. 303–310. [Google Scholar]
- Nico, G.; Leva, D.; Fortuny, J.; Antonello, G.; Tarchi, D. Generating digital terrain models by a ground-based synthetic aperture radar interferometer. IEEE Trans. Geosci. Remote Sens. 2005, 43, 45–49. [Google Scholar] [CrossRef]
- Ferrari, R.L. Lake Arrowhead 2008 Reservoir Survey; Technical Report No. SRH-2009-9; U.S. Department of the Interior: Washington, DC, USA, 2009.
- Wilson, G.L.; Richards, J.M. Procedural Documentation and Accuracy Assessment of Bathymetric Maps and Area/Capacity Tables for Small Reservoirs; U.S. Geological Survey Scientific Investigations Report 2006-5208; USGS: Reston, VA, USA, 2006.
- Magome, J.; Takeuchi, K.; Ishidaira, H. Estimating water storage in reservoirs by satellite observations and digital elevation model: A case study of the Yagisawa Reservoir. J. Hydrosci. Hydraul. Eng. 2002, 20, 49–57. [Google Scholar]
- Peng, D.; Guo, S.; Liu, P.; Liu, T. Reservoir storage curve estimation based on remote sensing data. J. Hydrol. Eng. 2006, 11, 165–172. [Google Scholar] [CrossRef]
- Stephens, T. Handbook on Small Earth Dams and Weirs; Cranfield Press: Bedford, UK, 1991. [Google Scholar]
- Nelson, K.D. Design and Construction of Small Earth Dams; Inkata: Melbourne, Australia, 1985. [Google Scholar]
- Liebe, J.; van de Giesen, N.; Andreini, M. Estimation of small reservoir storage capacities in a semi-arid environment: A case study in the Upper East Region of Ghana. Phys. Chem. Earth 2005, 30, 448–454. [Google Scholar] [CrossRef]
- Ludwig, R.; Scheider, P. Validation of digital elevation models from SRTM X-SAR for applications in hydrologic modeling. ISPRS J. Photogramm. Remote Sens. 2006, 60, 339–358. [Google Scholar] [CrossRef]
- Bayazit, M.; Önöz, B. Conditional distributions of ideal reservoir storage variables. J. Hydrol. Eng. 2000, 5, 52–58. [Google Scholar] [CrossRef]
- Zhang, J.; Chu, X. Impact of DEM resolution on puddle characterization: Comparison of different surfaces and methods. Water 2015, 7, 2293–2313. [Google Scholar] [CrossRef]
- Vaze, J.; Teng, J.; Spencer, G. Impact of DEM accuracy and resolution on topographic indices. Environ. Model. Softw. 2010, 25, 1086–1098. [Google Scholar] [CrossRef]
- Venkatesan, V.; Balamurugan, R.; Krishnaveni, M. Establishing water surface area-storage capacity relationship of small tanks using SRTM and GPS. Energy Procedia 2012, 16, 1167–1173. [Google Scholar] [CrossRef]
- Lee, K. Estimation of reservoir storage capacity using terrestrial LiDAR and multibeam sonar, Randy Poynter Lake, Rockdale County, Georgia. In Proceedings of the 2013 Georgia Water Resources Conference, Athens, Georgia, 10–11 April 2013.
- Mowafy, A. Performance analysis of the RTK technique in an urban environment. Aust. Surv. 2000, 45, 47–54. [Google Scholar] [CrossRef]
- Riley, S.; Talbot, N.; Kirk, G. A new system for RTK performance evaluation. In Proceedings of the 2000 IEEE Position Location and Navigation Symposium, San Diego, CA, USA, 13–16 March 2000; pp. 231–236.
- Shearer, J.W. The accuracy of digital elevation models. In Terrain Modeling in Surveying and Engineering; Patrie, G., Kennie, T.J.M., Eds.; Whittles Publishing Services: Caithness, UK, 1990; pp. 315–336. [Google Scholar]
- Petrie, G.; Kennie, T.J.M. Terrain modeling in surveying and civil engineering. Comput. Aided Des. 1987, 19, 171–187. [Google Scholar] [CrossRef]
- Hunter, G.J.; Caetano, M.; Goodchild, M.F. A methodology for reporting uncertainty in spatial database products. J. Urban Reg. Inf. Syst. Assoc. 1995, 7, 11–21. [Google Scholar]
- Gonga-Saholiariliva, N.; Gunnell, Y.; Petit, C.; Mering, C. Techniques for quantifying the accuracy of gridded elevation models and for mapping uncertainty in digital terrain analysis. Prog. Phys. Geogr. 2011, 35, 739–764. [Google Scholar] [CrossRef]
- Hall, M.; Tragheim, D.G. The Accuracy of ASTER digital elevation models, a comparison to NEXTMap Britain. Available online: http://sp.lyellcollection.org/content/345/1/43.abstract (accessed on 20 April 2016).
- Weng, Q. Quantifying uncertainty of digital elevation models derived from topographic maps. In Symposium on Geospatial Theory, Processing and Applications; ISPRS: Ottawa, ON, Canada, 2002; p. 16. [Google Scholar]
- Ackermann, F. Techniques and strategies for DEM generation. In Digital Photogrammetry: An Addendum to the Manual of Photogrammetry; Greve, C., Ed.; American Society of Photogrametry and Remote Sensing: Falls Church, VA, USA, 1996; pp. 135–141. [Google Scholar]
- Onorati, G.; Poscolieri, M.; Ventura, R.; Chiarini, V.; Crucilla, U. The digital elevation model of Italy for geomorphology and structural geology. Catena 1992, 19, 147–178. [Google Scholar] [CrossRef]
- Skidmore, A.K. Comparison of techniques for calculating gradient and slope from a gridded digital elevation model. Int. J. GIS 1989, 3, 323–334. [Google Scholar]
- Kundu, S.N.; Pradhan, B. Surface Area Processing in GIS. In Proceedings of the Map Asia 2003, PWTC, Kuala Lumpur, Malaysia, 13–15 October 2003; pp. 1–6.
- Takeuchi, K. On the scale diseconomy of large reservoirs inland occupation. Available online: https://www.google.com/url?sa=t&rct=j&q=&esrc=s&source=web&cd=1&ved=0ahUKEwjipsi70aHMAhWH2CwKHS3ID74QFggcMAA&url=http%3a%2f%2fhydrologie.org%2fredbooks%2fa240%2fiahs_240_0519.pdf&usg=AFQjCNFviMORvAqqLF4zYmekzOIEu5ktAg&sig2=PLHjUx9t6RtdX965Kryzrg&cad=rja (accessed on 20 April 2016).
- Zsuffa, I.; Galai, A. Reservoir Sizing by Transition Probabilities: Theory, Methodology, Application; Water Resources Publication: Littleton, CO, USA, 1987; p. 186. [Google Scholar]
- Yang, P.; Ames, D.P.; Fonseca, A.; Anderson, D.; Shrestha, R.; Glenn, N.F.; Cao, Y. What is the effect of LiDAR-derived DEM resolution on large-scale watershed model results? Environ. Model. Softw. 2014, 58, 48–57. [Google Scholar] [CrossRef]
- Nash, J.E.; Sutcliffe, J.V. River flow forecasting through conceptual models part I—A discussion of principles. J. Hydrol. 1970, 10, 282–290. [Google Scholar] [CrossRef]
- Jarihani, A.; Callow, J.; McVicar, T.; Van Niel, T.; Larsen, J. Satellite-derived Digital Elevation Model (DEM) selection, preparation and correction for hydrodynamic modelling in large, low-gradient and data-sparse catchments. J. Hydrol. 2015, 524, 489–506. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Study/Reference | Data Used/Data Compared | Location/Number of Test Sites | Reservoir Parameters Derived from DEM | Study Approach, Result(s) and Recommendations |
|---|---|---|---|---|
| Magome et al. [7,11] | LandSat data DEM from GTOPO30 Lake water levels from altimetry data | Yagisawa Reservoir in Japan (2002) and Akosombo dam in Ghana (2003) | Area-Volume (A–V) curve, Height or Depth-Volume (H–V) and Height-Area (H–A) relationships | Multiemporal monitoring of seasonal and interannual variation of water storage of the reservoirs Estimated the reservoir storage capacity using remote sensing data and DEM for ungauged basins Resolution of DEM influences the accuracy of storage power curves, and recommended higher spatial resolution DEM |
| Peng et al. [12] | LandSat data Topographic maps Hydrographic surveys | Fengman reservoir basin in China | No application of DEM | Use of LandSat data in reservoir surface area determination yielded similar results to the traditional approach Used 4th order polynomial to determine a new storage curve for the reservoir |
| Vaze et al. [19] | LiDAR and contour map used to derived DEM with a resolution of 25 m | NSW Australia in the Koondrook–Perricoota forest area | Multigrid DEM of 1 m, 2 m, 5 m, 10 m and 25 m resolutions | DEM accuracy and resolution impacts on the quality of topographic indices The quality of DEM-derived hydrological features is sensitive to both DEM accuracy and DEM grid size (resolution) |
| Venkatesan et al. [20] | Topographical maps 90 m DEM from SRTM Differential GPS | 14 small tanks (reservoirs) in the Sindapalli Uppodai sub-basin, Tamil Nadu, India | 90 m SRTM DEM used to derive the reservoir capacity | Reservoir surface area determination using DGPS Water surface area-storage capacity relationship using log capacity-area approach |
| Lee [21] | LiDAR Multibeam echo sounders KTK-GPS | Randy Poynter Lake in Rockdale County, Georgia | Multisource and multiresolution DEM combined for 3D reservoir model generation | The datasets combined to create a 3D model of the reservoir for the generation of a stage-storage curve. Accurate 3D model of the lake provides the storage capacity used to establish a baseline for monitoring future sedimentation |
| Zhang and Chu [18] | Physical and simulated watershed surface | Simulated DEM and case study of smooth and mountainous areas | Multiple DEM grid spacing (20 m–500 m) and effect on surface topographic detail representation and volume computation | DEMs and their accuracy depend on their resolutions or grid sizes, the acquisition technologies, sources of the original data and interpolation/aggregation methods). Recommended use of LiDAR for high-accuracy and high-resolution DEMs |
| Current study | DEM from RTK-GPS ASTER Global DEM Topographic map contours | Kesses reservoir in Kenya | Multi-grid DEM analysis at 0.1 m, 1 m, 3 m, 10 m, 30 m, 90 m resolutions Elevation, slope and surface area | From the above literature surveys, there is demand for higher resolution and more accurate DEM. The following are the contributions of the current study: Method for estimating potential reservoir storage capacity based on higher resolution and accurate DEM using RTK-GPS. Only two studies [20,21] respectively used DGPS and RTK-GPS A derivation of the relationship between the reservoir storage elements (volume-area-depth (V-A-D))for the proposed reservoir Useful in normal terrain in areas with scarce gauge data The quality of DEM-derived hydrologic features is sensitive to both DEM accuracy and DEM grid size, and a relationship between capacity and grid density is established for the case study |
| Positional Drift | Minimum (cm) | Maximum (cm) | Average (cm) | Root Mean Square Error (RMSE) (cm) |
|---|---|---|---|---|
| Easting (x) | 0.11 | 2.11 | 1.17 | 0.021 |
| Northing (y) | 0.10 | 0.84 | 0.48 | 0.026 |
| Height (z) | 0.15 | 2.92 | 1.21 | 0.017 |
| Terrain Grid Size (gi) | Grid Points along the Length (gli) | Grid Points along the Width (gwi) | Maximum Number of Grids (ni) for a Grid (gi) | Maximum Point Density (di = Area/ni) (m2/point) |
|---|---|---|---|---|
| 90 m × 90 m | 13 | 3 | 39 | 6390 |
| 30 m × 30 m | 38 | 10 | 380 | 874 |
| 10 m × 10 m | 115 | 29 | 3335 | 100 |
| 3 m × 3 m | 381 | 97 | 36,957 | 9 |
| 1 m × 1 m | 1142 | 291 | 332,322 | 1 |
| 0.3 m × 0.3 m | 3 807 | 970 | 3,692,970 | 0.09 |
| 0.1 m × 0.1 m | 11,421 | 2908 | 33,212,268 | 0.01 |
| Grid Cell Size and DEM Data Source | (Meters) | |
|---|---|---|
| 0.1 m × 0.1 m | RTK-GPS | 0.182 |
| ASTER | 0.194 | |
| Contour (planimetric) | 0.198 | |
| 1 m × 1 m | RTK-GPS | 0.212 |
| ASTER | 0.241 | |
| Contour (planimetric) | 0.202 | |
| 3 m × 3 m | RTK-GPS | 0.051 |
| ASTER | 0.287 | |
| Contour (planimetric) | 0.293 | |
| 10 m × 10 m | RTK-GPS | 0.467 |
| ASTER | 0.501 | |
| Contour (planimetric) | 0.525 | |
| 30 m × 30 m | RTK-GPS | 0.815 |
| ASTER 30 m Global DEM | 0.866 | |
| Contour (planimetric) | 0.889 | |
| 90 m × 90 m | RTK-GPS | 0.922 |
| ASTER 90 m Global DEM | 0.971 | |
| Contour (planimetric) | 0.986 | |
© 2016 by the author; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ouma, Y.O. Evaluation of Multiresolution Digital Elevation Model (DEM) from Real-Time Kinematic GPS and Ancillary Data for Reservoir Storage Capacity Estimation. Hydrology 2016, 3, 16. https://doi.org/10.3390/hydrology3020016
Ouma YO. Evaluation of Multiresolution Digital Elevation Model (DEM) from Real-Time Kinematic GPS and Ancillary Data for Reservoir Storage Capacity Estimation. Hydrology. 2016; 3(2):16. https://doi.org/10.3390/hydrology3020016
Chicago/Turabian StyleOuma, Yashon O. 2016. "Evaluation of Multiresolution Digital Elevation Model (DEM) from Real-Time Kinematic GPS and Ancillary Data for Reservoir Storage Capacity Estimation" Hydrology 3, no. 2: 16. https://doi.org/10.3390/hydrology3020016