


Numerical Approach Based on Solving 3D Navier–Stokes Equations for Simulation of the Marine Propeller Flow Problems

 ,
,  ,
,
Abstract
:1. Introduction
2. Description of the Method for Numerical Simulation of the Propeller Flow Problems
2.1. Governing Equations and Turbulence Modeling
2.2. Cavitating Flow Modeling
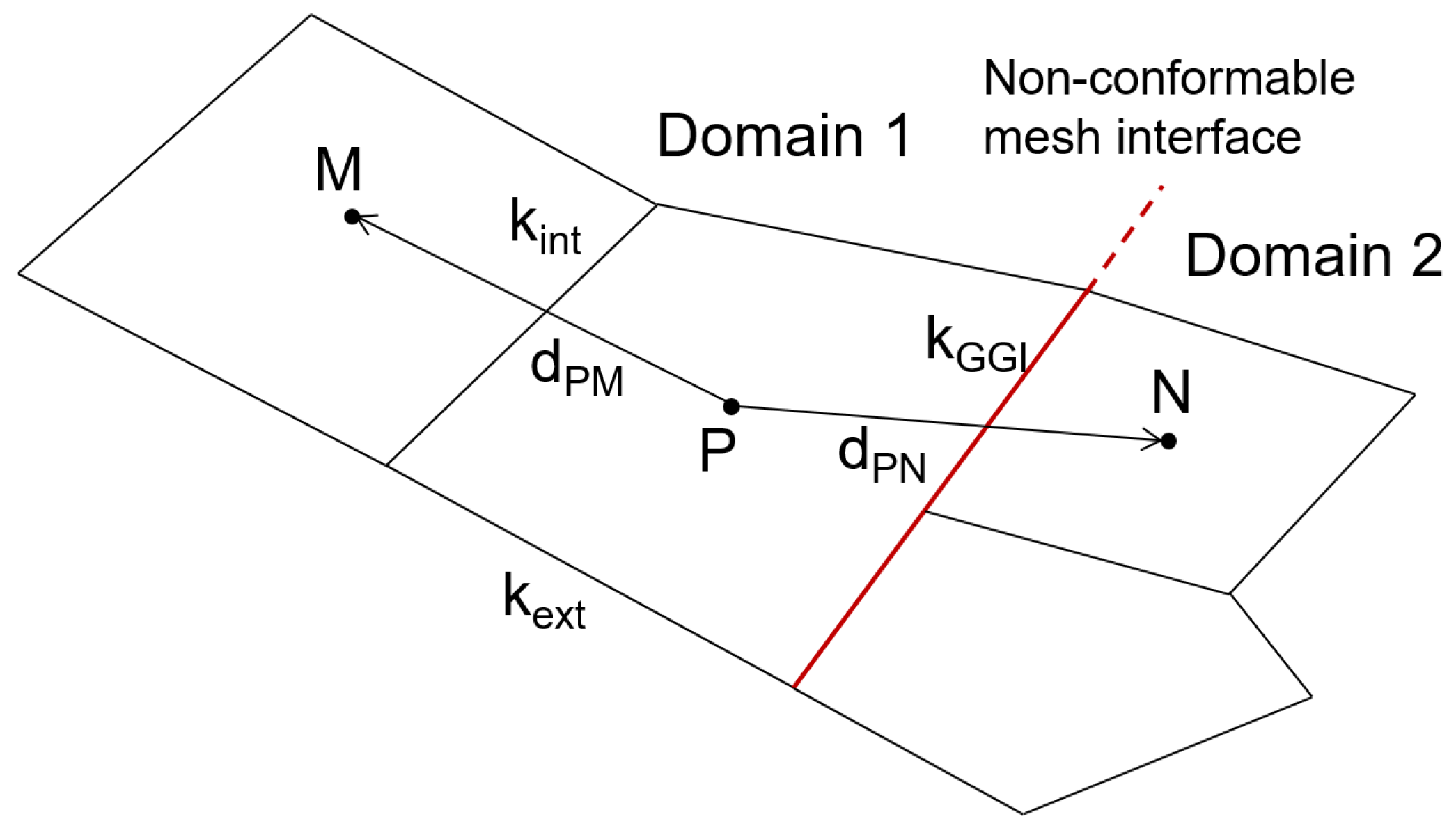
2.3. Rotation Modeling
2.4. Solution Algorithm
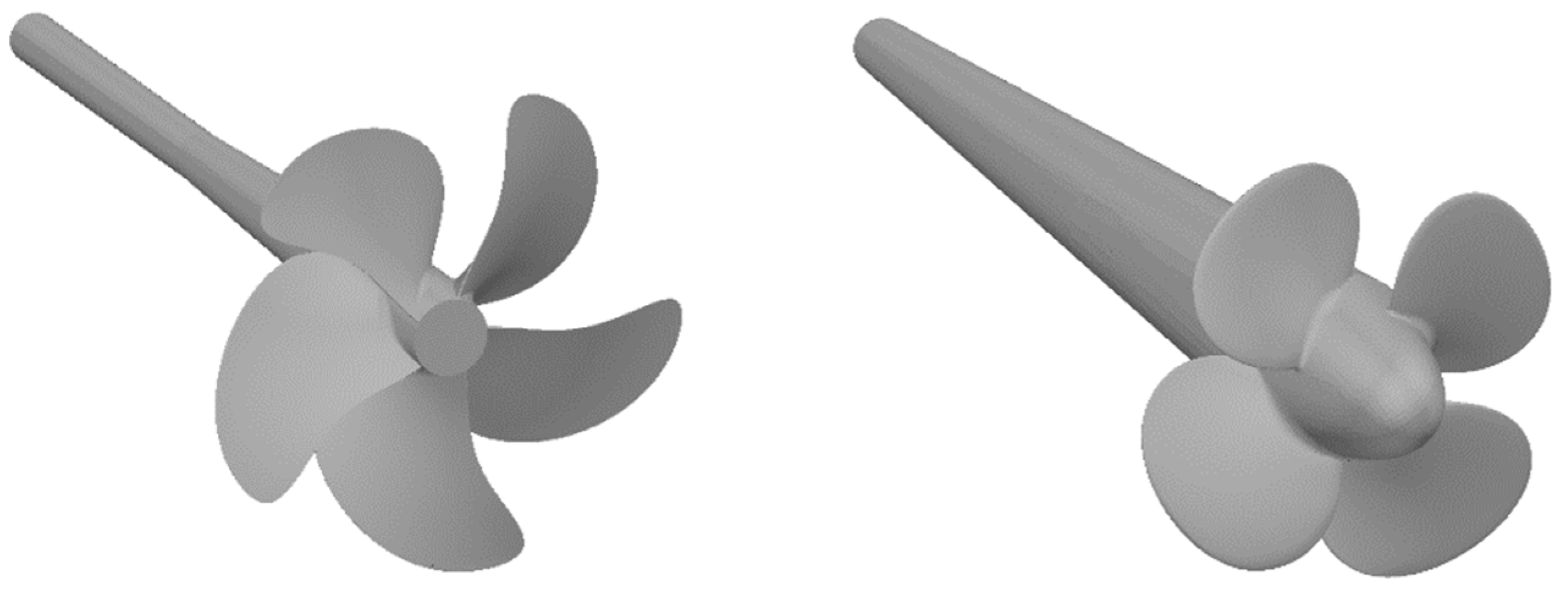
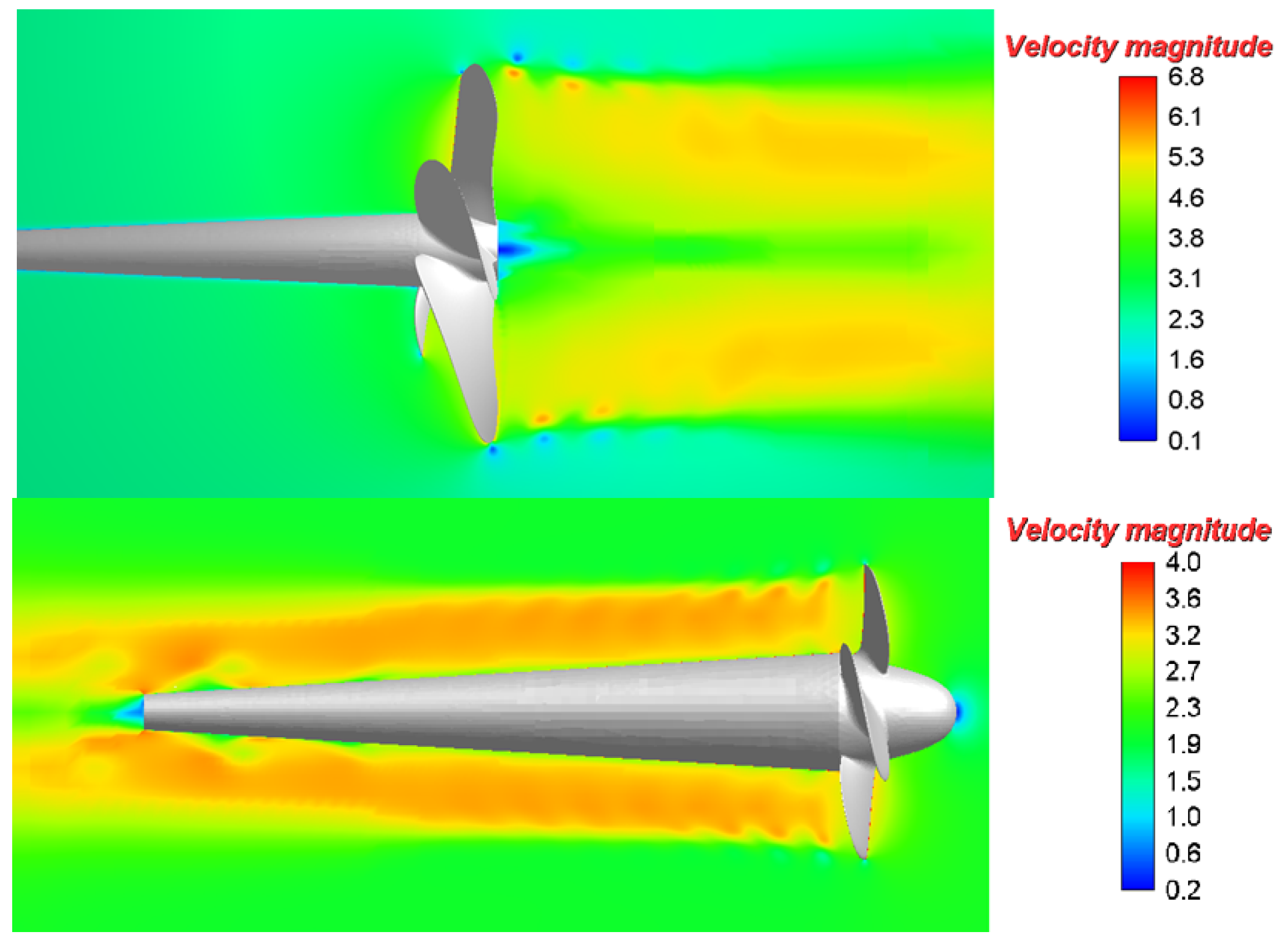
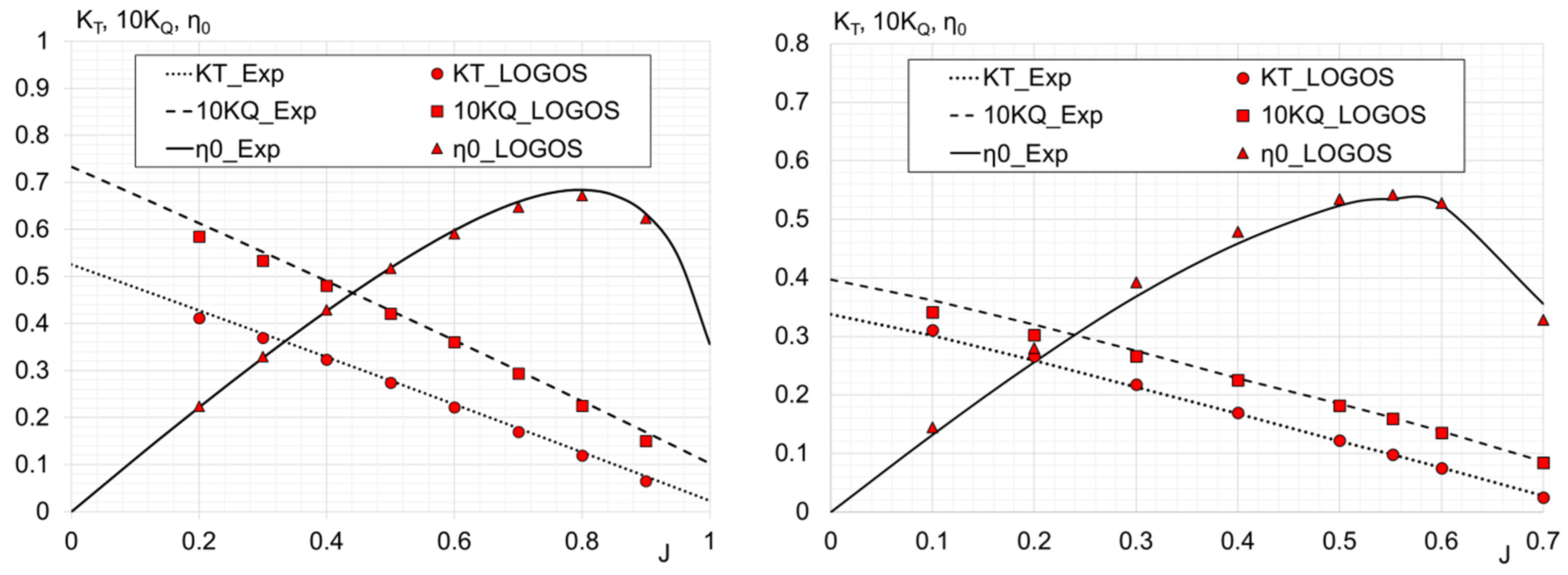
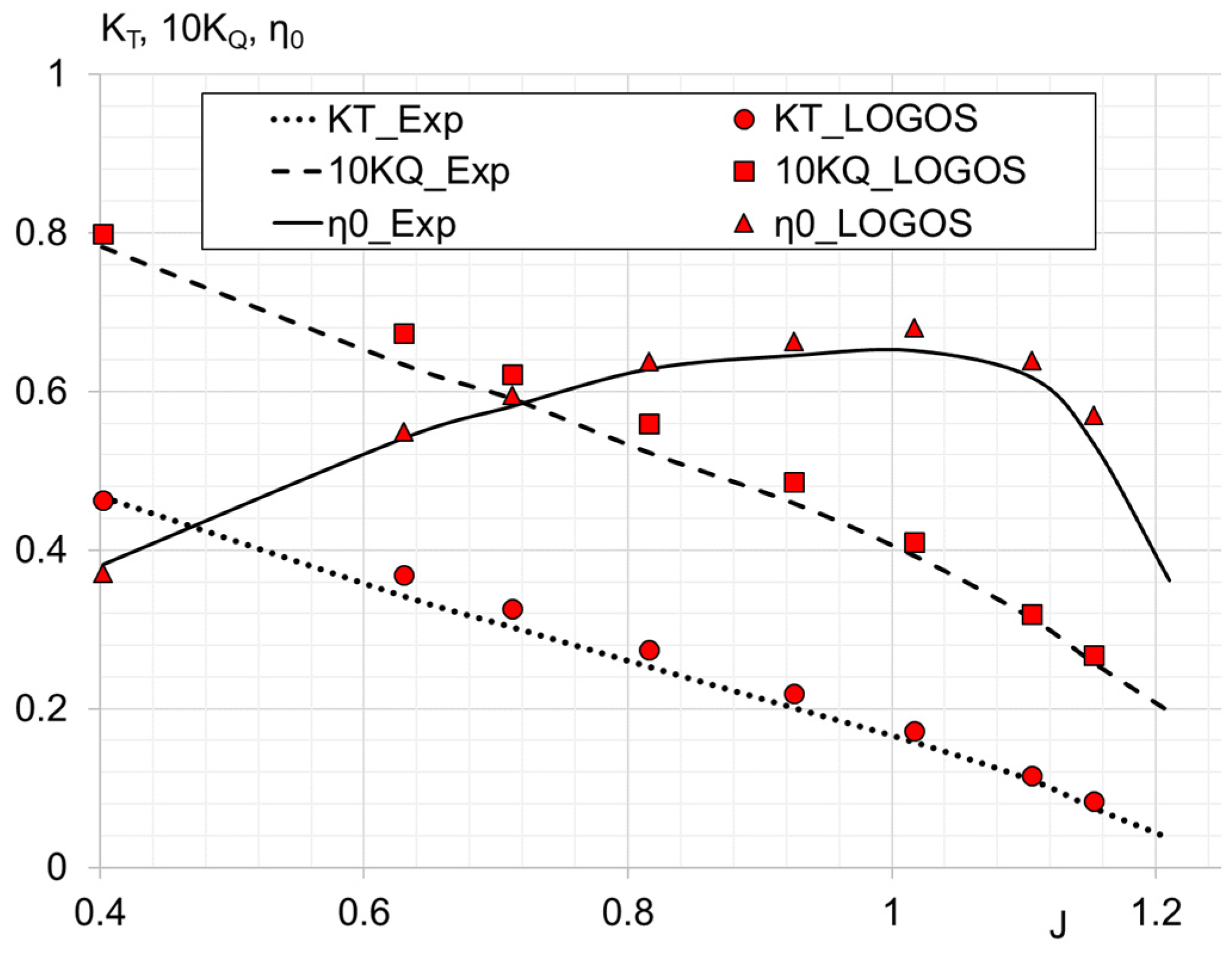
3. Numerical Calculation of the Propeller Performance in Open Water
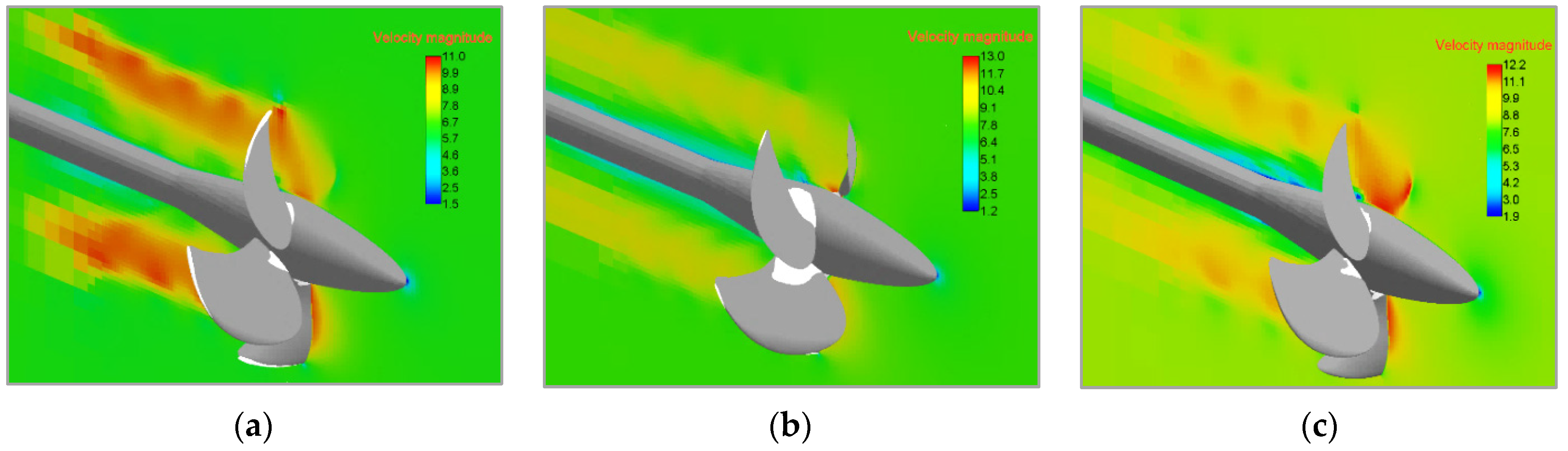
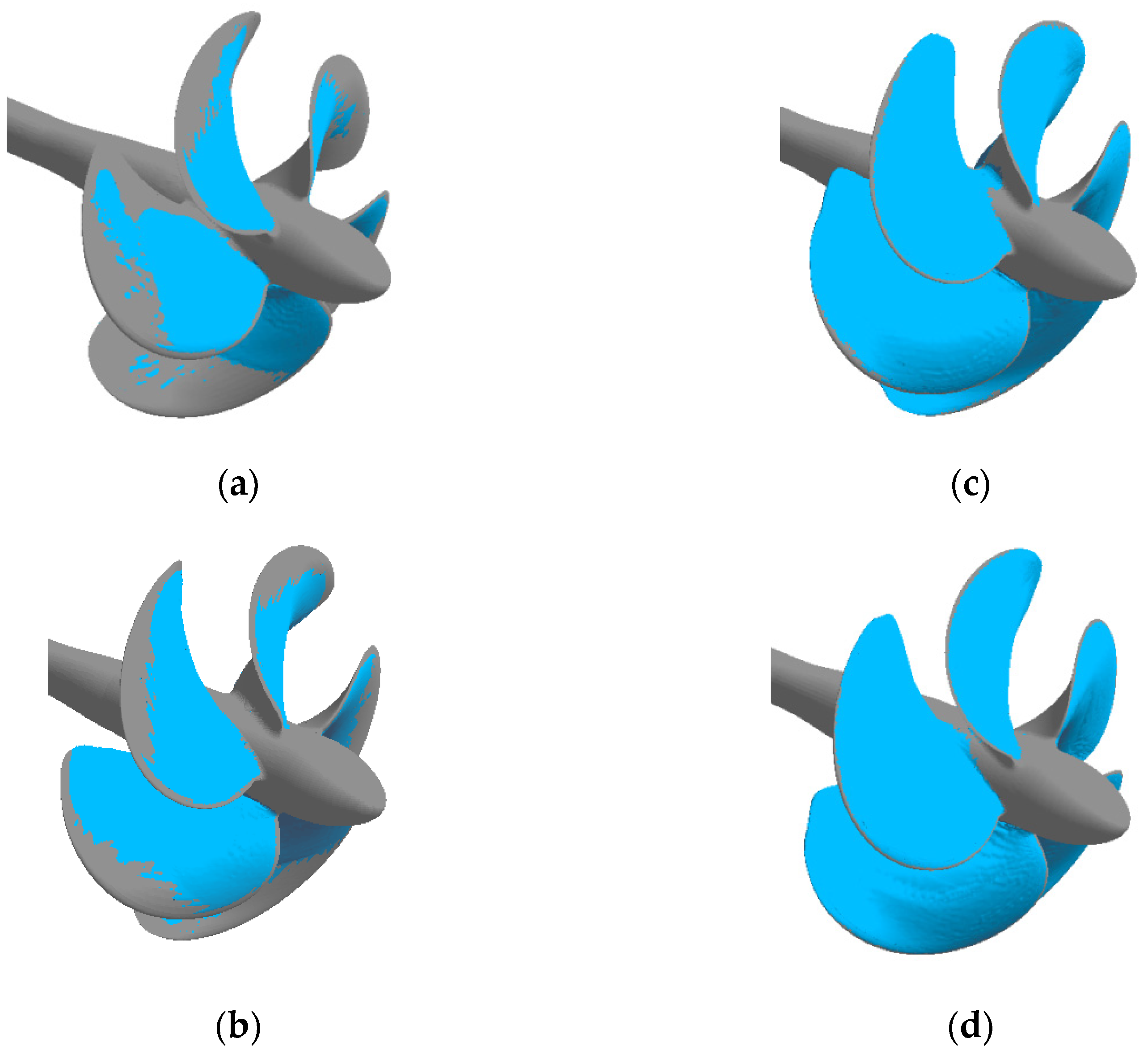
4. Numerical Calculation of the Propeller Performance under Cavitation Conditions
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ferziger, J.H.; Peric, M. Computational Method for Fluid Dynamics; Springer: New York, NY, USA, 2002. [Google Scholar]
- Spalart, P.R. Strategies for turbulence modelling and simulations. Int. J. Heat Fluid Flow. 2000, 21, 252–263. [Google Scholar] [CrossRef]
- Corson, D.; Jaiman, R.; Shakib, F. Industrial application of RANS modelling: Capabilities and needs. Int. J. Comput. Fluid Dyn. 2009, 23, 337–347. [Google Scholar] [CrossRef]
- Yusof, S.; Asako, Y.; Sidik, N.; Mohamed, S.; Japar, W. A Short Review on RANS Turbulence Models. CFD Lett. 2020, 11, 83–96. [Google Scholar]
- Launder, B.E.; Spalding, D.B. Lectures in Mathematical Models of Turbulence; Academic Press: London, UK, 1972. [Google Scholar]
- Sagaut, P. Large Eddy Simulation for Incompressible Flows: An Introduction; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Zhiyin, Y. Large-eddy simulation: Past, present and the future. Chin. J. Aeronaut. 2015, 28, 11–24. [Google Scholar] [CrossRef]
- Da-Qing, L. Validation of RANS predictions of open water performance of a highly skewed propeller with experiments. J. Hydrodyn. 2006, 18, 520–528. [Google Scholar]
- Guo, C.Y.; Zhao, D.G.; Sun, Y. Numerical simulation and experimental research on hydrodynamic performance of propeller with varying shaft depths. China Ocean Eng. 2014, 28, 271–282. [Google Scholar] [CrossRef]
- Morgut, M.; Nobile, E. Influence of grid type and turbulence model on the numerical prediction of the flow around marine propellers working in uniform inflow. Ocean Eng. 2012, 42, 26–34. [Google Scholar] [CrossRef]
- Bennaya, M.; Gong, J.; Hegaze, M.; Zhang, W. Numerical simulation of marine propeller hydrodynamic performance in uniform inflow with different turbulence models. Appl. Mech. Mater. 2013, 389, 1019–1025. [Google Scholar] [CrossRef]
- Baltazar, J.; Rijpkema, D.; de Campos, J.F. On the use of the Γ−ReΘt transition model for the prediction of the propellerperformance at model-scale. Ocean Eng. 2018, 170, 6–19. [Google Scholar] [CrossRef]
- Ahmed, S.; Croaker, P.; Doolan, C. Instability identification within ship propeller wakes. In Proceedings of the Sixth International Symposium on Marine Propulsors—SMP’19, Rome, Italy, 26–30 May 2019. [Google Scholar]
- Asnaghi, A.; Feymark, A.; Bensow, R.E. Computational Analysis of Cavitating Marine Propeller Performance using OpenFOAM. In Proceedings of the Fourth International Symposium on Marine Propulsors—SMP’15, Austin, TX, USA, 4 June 2015. [Google Scholar]
- Martin, V.; Krishnan, M. Large eddy simulation of crashback in marine propellers. In Proceedings of the 44th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 9–12 January 2006. [Google Scholar]
- Kumar, P.; Mahesh, K. Large eddy simulation of propeller wake instabilities. J. Fluid Mech. 2017, 814, 361–396. [Google Scholar] [CrossRef]
- Posa, A.; Broglia, R.; Felli, M.; Cianferra, M.; Armenio, V. Hydroacoustic analysis of a marine propeller using large-eddy simulation and acoustic analogy. J. Fluid Mech. 2022, 947, A46. [Google Scholar] [CrossRef]
- Franc, J.P.; Michel, J.M. Fundamentals of Cavitation. In Fluid Mechanics and Its Applications; Springer: Berlin/Heidelberg, Germany, 2004. [Google Scholar]
- Hirt, C.W.; Nichols, B.D. Volume of fluid (VOF) method for the dynamics of free boundaries. J. Comput. Phys. 1981, 39, 201–225. [Google Scholar] [CrossRef]
- Efremov, V.R.; Kozelkov, A.S.; Kornev, A.V.; Kurkin, A.A.; Kurulin, V.V.; Strelets, D.Y.; Tarasova, N.V. Method for taking into account gravity in free-surface flow simulation. Comput. Math. Math. Phys. 2017, 57, 1720–1733. [Google Scholar] [CrossRef]
- Schnerr, G.H.; Sauer, J. Physical and numerical modeling of unsteady cavitation dynamics. In Proceedings of the Fourth International Conference on Multiphase Flow, New Orleans, LA, USA, 27 May–1 June 2001. [Google Scholar]
- Zwart, P.J.; Gerber, A.G.; Belamri, T. A Two-phase flow model for predicting cavitation dynamics. In Proceedings of the Fifth International Conference on Multiphase Flow, Yokohama, Japan, 30 May–3 June 2004. [Google Scholar]
- Kunz, R.F.; Boger, D.A.; Stinebring, D.R. A preconditioned Navier-Stokes method for two-phase flows with application to cavitation prediction. Comput. Fluids 2000, 29, 849–875. [Google Scholar] [CrossRef]
- Singhal, K.; Athavale, M.M.; Li, H.; Jiang, Y. Mathematical Basis and Validation of the Full Cavitation Model. J. Fluids Eng. 2002, 124, 617–624. [Google Scholar] [CrossRef]
- Ji, B.; Luo, X.; Peng, X.; Wu, Y.; Xu, H. Numerical analysis of cavitation evolution and excited pressure fluctuation around a propeller in non-uniform wake. Int. J. Multiph. Flow 2012, 43, 13–21. [Google Scholar] [CrossRef]
- Paik, K.J.; Park, H.; Seo, J. URANS Simulations of Cavitation and Hull Pressure Fluctuation for Marine Propeller with Hull Interaction. In Proceedings of the Third International Symposium on Marine Propulsors—SMP’13, Launceston, Australia, 5–8 May 2013. [Google Scholar]
- Kozelkov, A.; Kurkin, A.; Kurulin, V.; Plygunova, K.; Krutyakova, O. Validation of the LOGOS Software Package Methods for the Numerical Simulation of Cavitational Flows. Fluids 2023, 8, 104. [Google Scholar] [CrossRef]
- Roohi, E.; Zahiri, A.P.; Passandideh-Fard, M. Numerical simulation of cavitation around a two-dimensional hydrofoil using VOF method and LES turbulence model. J. Appl. Math. Model. 2013, 37, 6469–6488. [Google Scholar] [CrossRef]
- Wang, Z.; Li, L.; Cheng, H.; Ji, B. Numerical investigation of unsteady cloud cavitating flow around the Clark-Y hydrofoil with adaptive mesh refinement using OpenFOAM. J. Ocean Eng. 2020, 206, 107349. [Google Scholar] [CrossRef]
- Zheng, C.; Liu, D.; Huang, H. The Numerical Prediction and Analysis of Propeller Cavitation Benchmark Tests of YUPENG Ship Model. J. Mar. Sci. Eng. 2019, 7, 387. [Google Scholar] [CrossRef]
- Li, L.; Sherwin, S.J.; Bearman, P.W. A moving frame of reference algorithm for fluid/structure interaction of rotating and translating bodies. Int. J. Numer. Meth. Fluids 2002, 38, 187–206. [Google Scholar] [CrossRef]
- Menter, F.R.; Kuntz, M.; Langtry, R. Ten Years of Industrial Experience with the SST Turbulence Model. Turbul. Heat Mass Transf. 2003, 4, 625–632. [Google Scholar]
- Menter, F.R.; Langtry, R.B.; Likki, S.R.; Suzen, Y.B.; Huang, P.G.; Völker, S.A. Correlation-based Transition Model using Local Variables. Part 1: Model Formulation. J. Turbomach. 2006, 128, 413–422. [Google Scholar] [CrossRef]
- Tyatyushkina, E.S.; Kozelkov, A.S.; Kurkin, A.A.; Pelinovsky, E.N.; Kurulin, V.V.; Plygunova, K.S.; Utkin, D.A. Verification of the LOGOS Software Package for Tsunami Simulations. Geosciences 2020, 10, 385. [Google Scholar] [CrossRef]
- Fletcher, C. Computational Techniques for Fluid Dynamics in Two Books; Mir: Moscow, Russia, 1991. [Google Scholar]
- Volkov, K.N.; Emelyanov, V.N. Large Eddy Simulations in Calculations of Turbulent Flows; Fizmatlit: Moscow, Russia, 2008. [Google Scholar]
- Spalart, P.R.; Deck, S.; Shur, M.L.; Squires, K.D.; Strelets, M.K.; Travin, A. A new version of detached-eddy simulation, resistant to ambiguous grid densities. Theor. Comput. Fluid Dyn. 2006, 20, 181–195. [Google Scholar] [CrossRef]
- Hasse, C.; Sohm, V.; Wetzel, M.; Durst, B. Hybrid URANS/LES Turbulence Simulation of Vortex Shedding Behind a Triangular Flameholder. Flow Turbul. Combust. 2009, 83, 1–20. [Google Scholar] [CrossRef]
- Landau, L.D.; Lifshitz, E.M. Fluid Mechanics; Elsevier: Amsterdam, The Netherlands, 2013; Volume 6. [Google Scholar]
- Khrabry, A.I.; Smirnov, E.M.; Zaytsev, D.K. Solving the Convective Transport Equation with Several High-Resolution Finite Volume Schemes: Test Computations. In Computational Fluid Dynamics 2010; Kuzmin, A., Ed.; Springer: Berlin/Heidelberg, Germany, 2011; pp. 535–540. [Google Scholar]
- Efremov, V.; Kozelkov, A.; Dmitriev, S.; Kurkin, A.; Kurulin, V.; Utkin, D. Technology of 3D Simulation of High-Speed Damping Processes in the Hydraulic Brake Device. In Modeling and Simulation in Engineering; Volkov, K., Ed.; Kingston University: London, UK, 2018. [Google Scholar]
- Muzaferija, S.; Peric, M.; Sames, P.; Schelin, T. A two-fluid Navier-Stokes solver to simulate water entry. In Proceedings of the 22nd Symposium of Naval Hydrodynamics, Washington, DC, USA, 9–14 August 1998. [Google Scholar]
- Loytsyanskiy, L.G. Fluid and Gas Mechanics; State Publishing House of Technical and Theoretical Literature: Moscow, Russia, 1950. [Google Scholar]
- Beaudoin, M.; Jasak, H. Development of a generalized grid interface for turbomachinery simulations with OpenFOAM. In Proceedings of the Open Source CFD International Conference, Berlin, Germany, 4–5 December 2008. [Google Scholar]
- Roache, P. Computational Fluid Dynamics; Mir: Moscow, Russia, 1980. [Google Scholar]
- Kozelkov, A.; Strelets, D.; Efremov, V.; Nechepurenko, Y.; Kurulin, V.; Tyatyushkina, E.; Kornev, A. Investigation of the properties of discretization schemes for the volume fraction transfer equation in the calculation of multiphase flows by the VOF method. Proc. Mosc. Inst. Phys. Technol. 2017, 9, 71–89. [Google Scholar]
- Jasak, H. Error Analysis and Estimation for the Finite Volume Method with Applications to Fluid Flow; Department of Mechanical Engineering, Imperial College of Science: London, UK, 1996. [Google Scholar]
- Patankar, S.V. Numerical Heat Transfer and Fluid Flow; Series in Computational Methods in Mechanics and Thermal Sciences; Taylor & Francis: Abingdon, UK, 1980. [Google Scholar]
- Mencinger, J. An alternative finite volume discretization of body force field on collocated grid. In Finite Volume Method—Powerful Means of Engineering Design; IntechOpen: London, UK, 2012. [Google Scholar]
- Kozelkov, A.S.; Kurulin, V.V.; Lashkin, S.V.; Shagaliev, R.M.; Yalozo, A.V. Investigation of Supercomputer Capabilities for the Scalable Numerical Simulation of Computational Fluid Dynamics Problems in Industrial Applications. Comput. Math. Math. Phys. 2016, 56, 1506–1516. [Google Scholar] [CrossRef]
- Taranov, A. Mesh convergence in calculations of flow around ice breaker propeller model. Trans. Krylov State Res. Cent. 2015, 90, 55–62. [Google Scholar]
- Paik, K.J. Numerical study on the hydrodynamic characteristics of a propeller operating beneath a free surface. Int. J. Nav. Archit. Ocean Eng. 2017, 9, 655–667. [Google Scholar] [CrossRef]
- Heinke, H.-J. Potsdam Propeller Test Case (PPTC) Cavitation Tests with the Model Propeller VP1304; SVA-Report 3753; Schiffbau-Versuchsanstalt Potsdam: Potsdam, Germany, 2011. [Google Scholar]
- Bagaev, D.; Yegorov, S.; Lobachev, M.; Rudnichenko, A.; Taranov, A. Validation of numerical simulation technology for cavitating flows. Trans. Krylov State Res. Cent. 2017, 4, 46–56. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mode | 1 | 2 | 3 |
|---|---|---|---|
| Pressure in tube, Pa | 43,071 | 31,353 | 42,603 |
| Advance ratio | 1.09 | 1.269 | 1.408 |
| Cavitation number | 2.024 | 1.424 | 2.0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kozelkov, A.; Kurulin, V.; Kurkin, A.; Taranov, A.; Plygunova, K.; Krutyakova, O.; Korotkov, A. Numerical Approach Based on Solving 3D Navier–Stokes Equations for Simulation of the Marine Propeller Flow Problems. Fluids 2023, 8, 293. https://doi.org/10.3390/fluids8110293
Kozelkov A, Kurulin V, Kurkin A, Taranov A, Plygunova K, Krutyakova O, Korotkov A. Numerical Approach Based on Solving 3D Navier–Stokes Equations for Simulation of the Marine Propeller Flow Problems. Fluids. 2023; 8(11):293. https://doi.org/10.3390/fluids8110293
Chicago/Turabian StyleKozelkov, Andrey, Vadim Kurulin, Andrey Kurkin, Andrey Taranov, Kseniya Plygunova, Olga Krutyakova, and Aleksey Korotkov. 2023. "Numerical Approach Based on Solving 3D Navier–Stokes Equations for Simulation of the Marine Propeller Flow Problems" Fluids 8, no. 11: 293. https://doi.org/10.3390/fluids8110293
APA StyleKozelkov, A., Kurulin, V., Kurkin, A., Taranov, A., Plygunova, K., Krutyakova, O., & Korotkov, A. (2023). Numerical Approach Based on Solving 3D Navier–Stokes Equations for Simulation of the Marine Propeller Flow Problems. Fluids, 8(11), 293. https://doi.org/10.3390/fluids8110293