2.1. Electrical Analysis of an SC Working in a Fast-Charging System
This section will briefly describe the topology and main values of the fast charger of the type described in [
32]. The capacitor bank is made of n
pc parallel branches or “strings”, some of which can be disconnected by means of switches or relays according to each moment’s needs, which will be determined by the initial voltage, U
02, that the electric vehicle has when it arrives at the charging station. The minimum number of parallel branches of the charger will be denoted by n
pcmin, and the maximum by n
pcmax. Each string of the charger is made up of n
sc cells connected in series, considered as conventional capacitors of constant capacitance C
cell and internal resistance R
cell. By the time the vehicle arrives at the charging station, the charger is considered to have an initial voltage, U
01. As soon as the charger transfers some of its energy over the vehicle, it must be recharged so that its cells reach that same voltage again and are ready for the arrival of the next vehicle.
Table 1 shows the values of the charger designed in [
32], which will be used, as an example, for the thermal analysis in
Section 3.
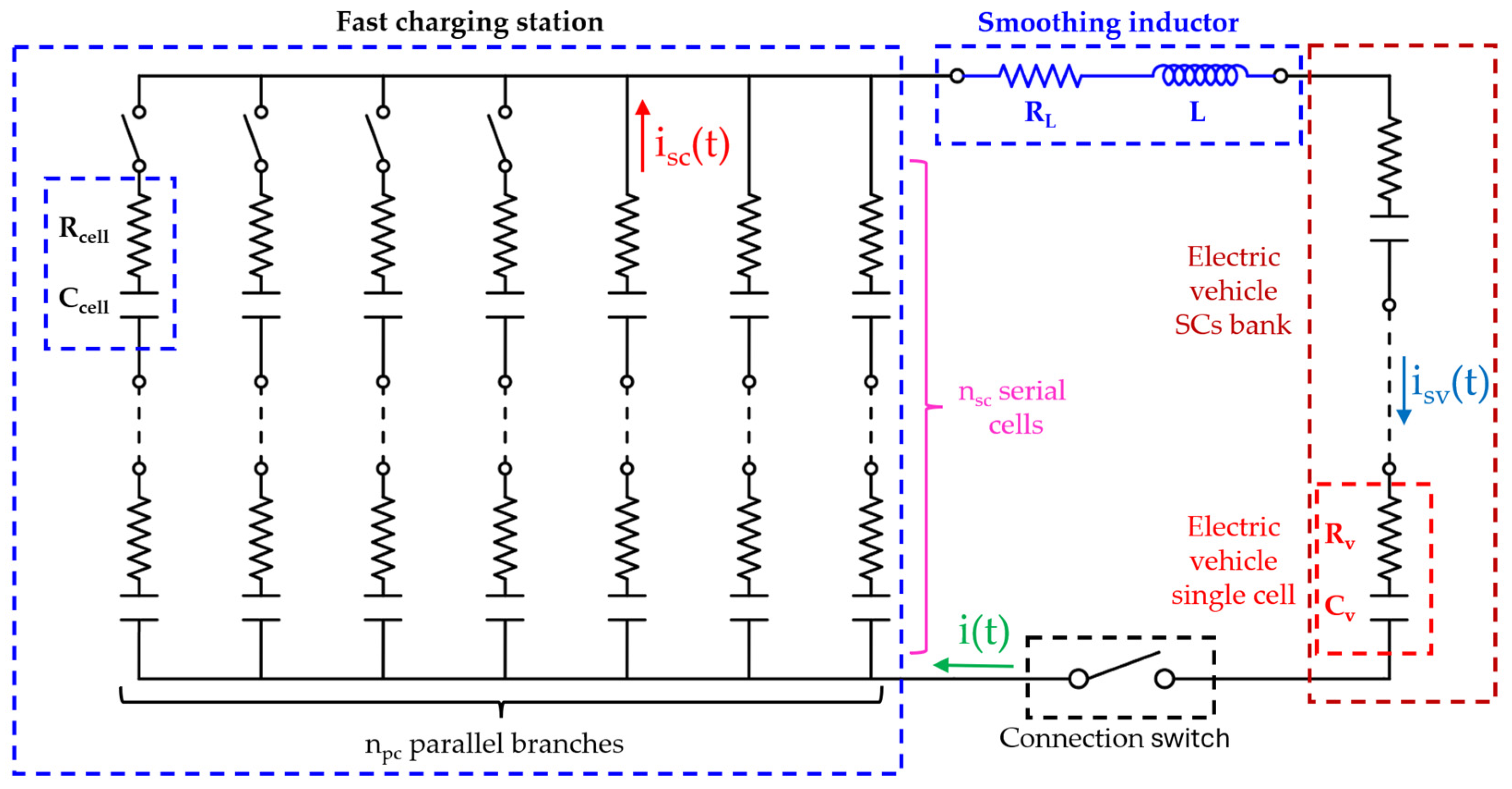
Between the charger and the electric vehicle, there will be a smoothing inductor to limit the peak current that occurs when connecting both circuits. This inductor is considered to have an inductance L = 2.71 mH and an internal resistance RL = 166.4 mΩ.
The capacitor bank that is mounted on the vehicle shall generally consist of n
pv branches in parallel, and each of them shall contain n
sv elements in series. Each individual cell will have C
v capacitance and R
v internal resistance. The rated voltage of this block is U
2N. It is assumed that the vehicle’s SC battery, on arrival at the charging station, has an initial voltage U
02, which will be between the following limits: 0.5∙U
2N ≥ U
02 ≥ 0.8∙U
2N. In the specific example studied in [
32], the data for the electric vehicle are as shown in
Table 2.
J. F. Pedrayes et al. [
32] detail the complete procedure for sizing the charger capacitor bank (n
pc, n
sc, R
cell, C
cell, and U
01) and smoothing inductor (R
L and L). To do this, it is necessary to know the maximum time allowed to charge the vehicle, t
charge; the maximum peak current allowed during charging, I
max; and the values of the capacitor bank of the electric vehicle (n
pv, n
sv, C
v, and R
v). The calculation of the latter will depend on the demanded power profile by the vehicle and the range to be given, for which the dimensioning method proposed in [
43] can be used. In the design of the charger and the smoothing inductor, the aging of the cells (both the charger and the electric vehicle) has been considered, as it will produce changes in the capacitance and internal resistance of both.
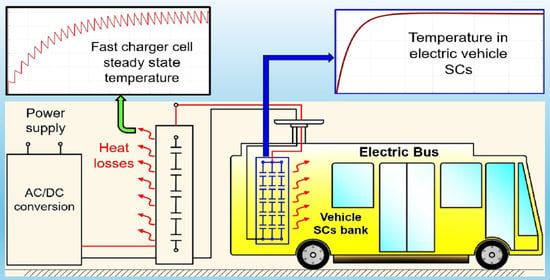
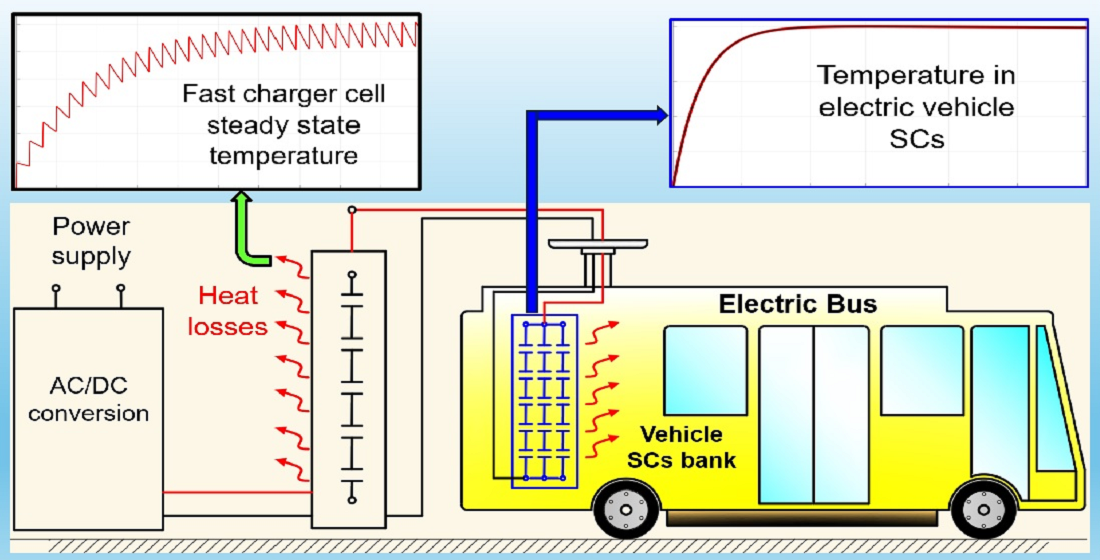
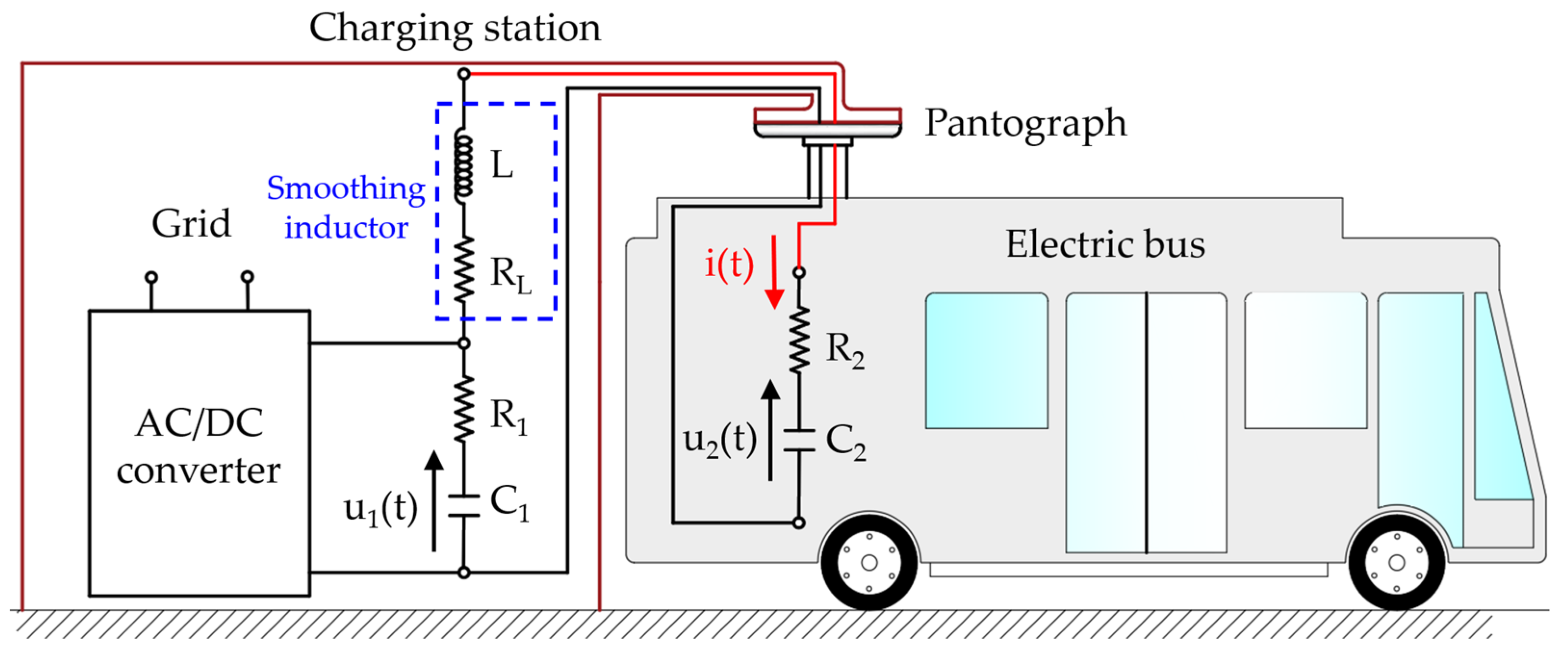
Figure 1 shows a complete schematic of the fast-charging station (charger-smoothing inductor-electric vehicle), with all branches in parallel.
Figure 2 shows a simplified schematic of the set. The AC/DC converter is responsible for raising the voltage of the charger cells to the U
01 voltage, once it has discharged part of its energy into the cells of the electric vehicle.
The equivalent resistance and capacitance of the charger (R
1 and C
1 respective) have the following values:
Once the fast charger is built, the number of serial elements of each string, n
sc, will be fixed. However, the number n
pc of parallel branches that the charger has will vary depending on the initial voltage of the vehicle’s SC bank at the time of connection of both blocks, u
2 (t = 0) = U
02. Therefore, the R
1 and C
1 values will be variable. However, in the SC bank of the electric vehicle, both the number of elements in series, n
sv, and branches in parallel, n
pv, will be constant, so that their equivalent resistance and capacitance, R
2 and C
2, are as follows:
For the thermal analysis, R
2 and C
2 will be considered constant and with the corresponding values at the beginning of their useful life (0% degree of aging) since this will be the most unfavorable case for the charger from the thermal point of view. However, in the design of the charger, the possible aging of the cells of the electric vehicle has already been taken into account. It is usually considered that, at the end of the useful life, the cells will have doubled the value of their internal resistance, compared with their initial value, while the capacity will have been reduced by 20%. These values may vary slightly depending on the manufacturer, but they are the most common, and these will be considered for charger cells. For the smoothing inductor, no variation in its parameters due to aging has been applied. Knowing that it has a known internal resistance of R
L value, the total resistance of the circuit, R
T, is as follows:
The equivalent capacitance of the set, C
eq, has the following value:
The total circuit has two energy storage elements: the equivalent capacitance, C
eq, and the smoothing inductor, L. When they are connected by means of the pantograph, a current i(t) will appear (
Figure 1), whose time evolution responds to the following second-order ordinary differential equation (ODE):
As indicated in [
32], the elements of the fast charger must be sized so that, during the transient state, the assembly behaves as an overdamped system, in order to avoid dangerous voltages, which could damage any of the cells of the assembly, and to minimize the charging time of the electric vehicle.
If the initial voltage of the charger, u
1 (t = 0) = U
01, and the initial voltage of the vehicle’s SC bank, u
2 (t = 0) = U
02, are known (U
01 > U
02), and defining the difference between both as ΔU = U
01 − U
02, the solution of the ODE given in (7) is as follows:
In expression (8), sinh () is the hyperbolic sine function. The α constant is the damping coefficient of the circuit, which is measured in (s
−1). Its value is given by the following:
The resonant pulsation of the circuit is ω
0 (s
−1), which depends only on the inductor and equivalent capacitance of the circuit, according to the following expression:
The coefficient β that appears in i(t) is defined as damped pulsation and has the same units as α and ω
0. Its value is as follows:
From the total current i(t), it is easy to deduce the value of the instantaneous current going through each branch of the charger, i
sc(t), and each branch of the vehicle’s SC bank, i
sv(t), as shown in
Figure 1, which are as follows:
The time it takes for the energy to be transferred from the charger to the electric vehicle, which will be denoted as t
dch, will be equal to the time it takes for both currents to be extinguished. Considering that exponential functions fall to zero after a time whose value is approximately equal to seven times the time constant of the circuit, this time can be calculated with the following expression:
After the t
dch time, the circuit will have reached the steady state. All charger values designed in [
32] have been chosen so that t
dch ≤ t
charge = 30 s, regardless of the initial value of the vehicle’s initial voltage U
02 or the degree of aging of any of the cells in the assembly. Other values can be chosen in the design of the fast charger, depending on the needs of the application.
The instantaneous voltages of the equivalent capacitance of the charger, C
1, and of the electric vehicle, C
2, u
1(t) and u
2(t), respectively, are obtained directly from the current given in (8) and using the relationship between it and these capacitances. The values of both voltages (
Figure 2) are given by the following functions:
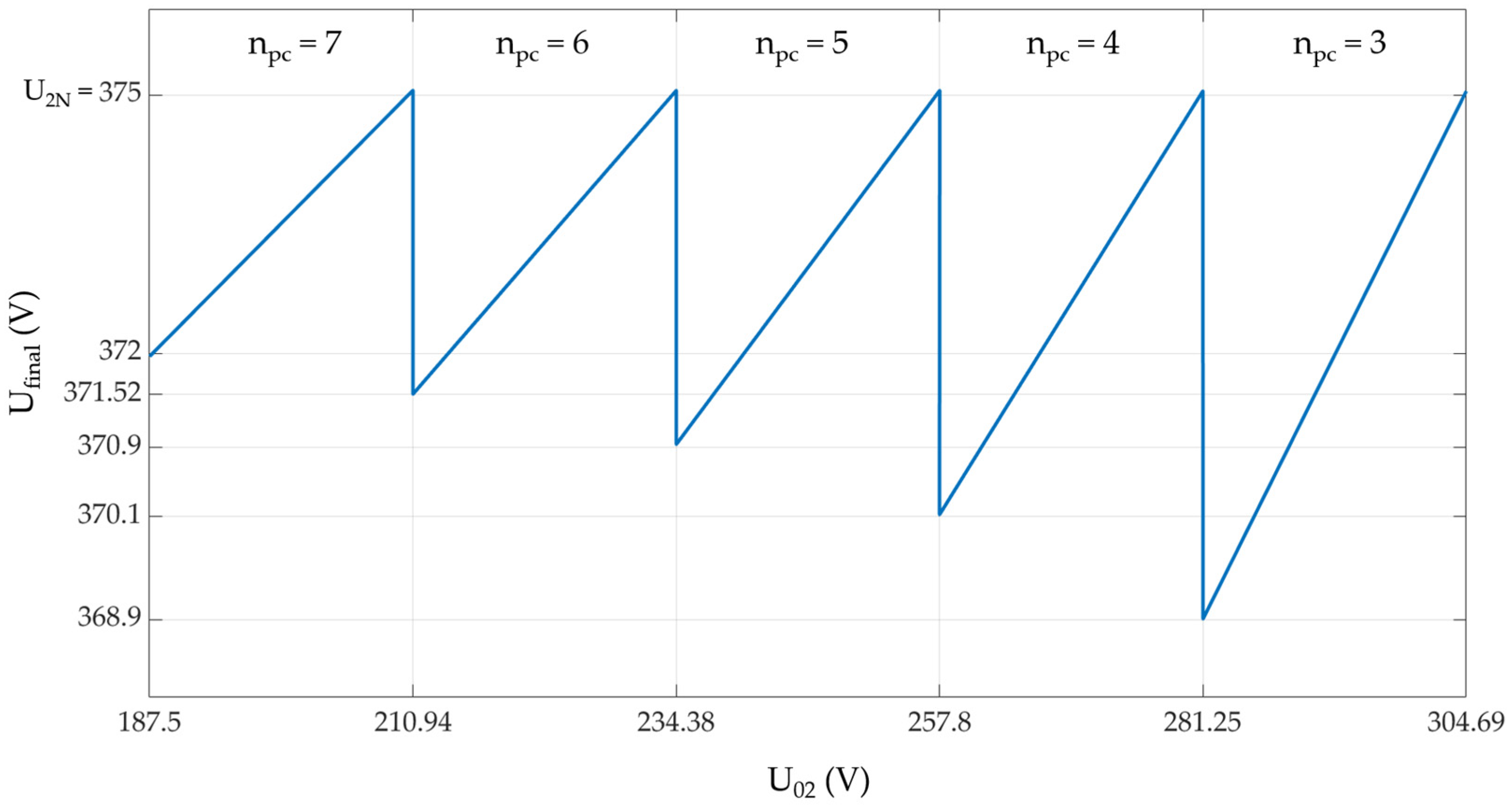
If the circuit is allowed to reach the steady state, the two capacitances will converge to the same voltage, the final value of which, U
final, will be the following:
As can be deduced from expression (17), the equivalent capacitance of the charger, C
1, must be variable, so that it adapts its value according to the voltage with which the vehicle arrives at the station, U
02, so that the final voltage of the assembly, U
final, is a value as close as possible to U
2N. That is the reason the charger designed in [
32] has seven branches connected in parallel, four of which can be disconnected by means of switches.
Figure 3 shows what the U
final value will be based on the initial voltage of the vehicle, U
02, and depending on the number of branches connected to the charger, n
pc.
2.2. Thermal Analysis of an SC, Working in a Fast-Charging System
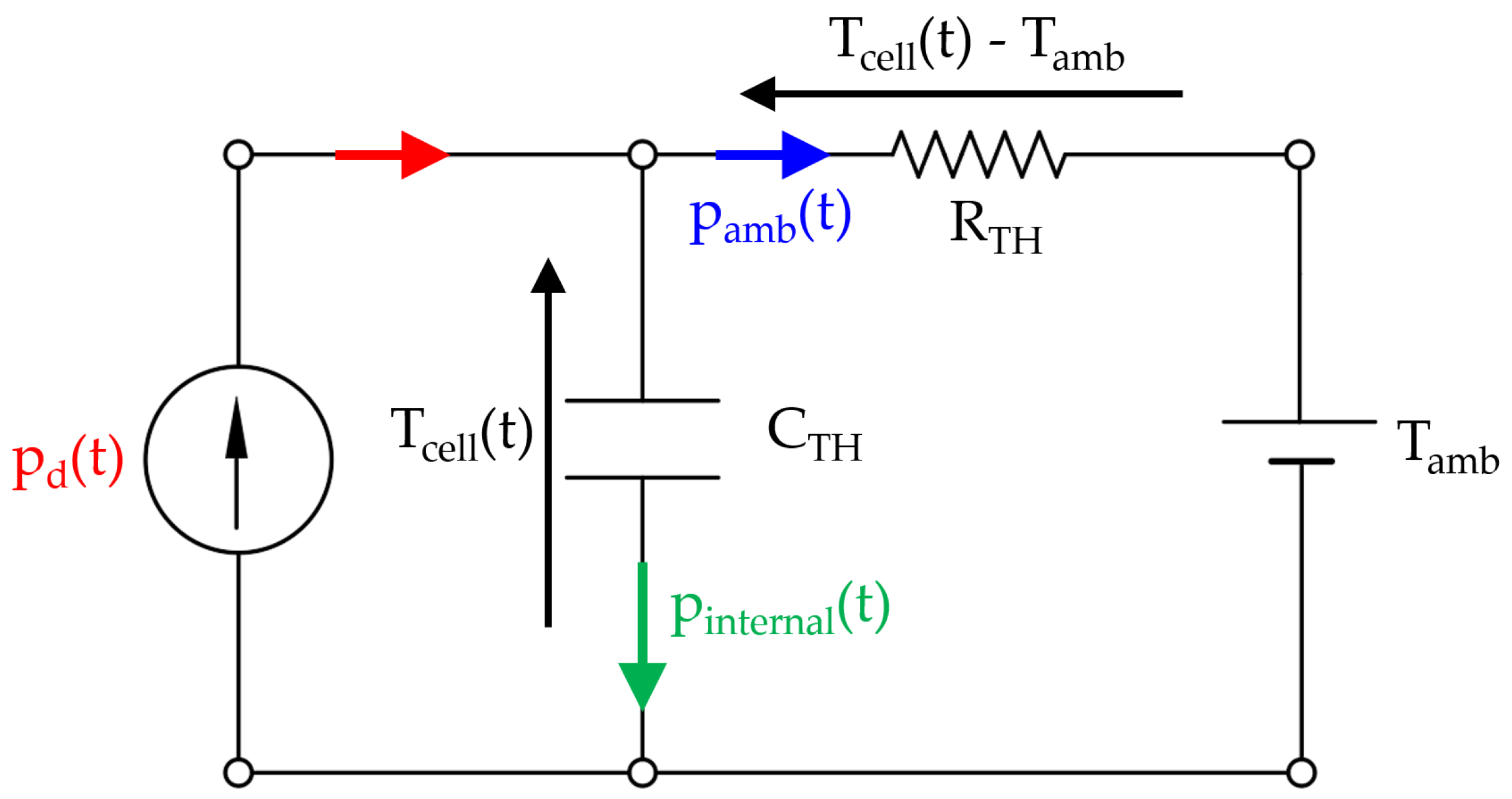
The most used heat transfer model is the equivalent circuit model, which is based on the analogy between a thermal circuit and an electrical circuit (
Figure 4). In this model, the dissipated power in the internal resistance of the SC, which is transformed into heat, p
d(t), is represented as a current source. The ambient temperature, T
amb, which will be considered constant, is modeled as a voltage source. The passive elements of the model are the thermal resistance, R
TH [°C/W], and the thermal capacitance, C
TH [J/°C], which appear in the datasheets provided by the manufacturers. In this model, p
amb(t) represents the heat dissipated to the environment and p
internal(t) represents the power that increases the internal energy of the cell, i.e., the power that causes an increase in temperature.
The differential equation that determines the thermal behavior of the cell is as follows:
In (18), θ(t) represents the thermal jump or temperature difference between the cell envelope and the environment temperature, the latter being considered constant.
If an SC of the charger, with internal resistance R
cell, is permanently charged and discharged with the same constant current, I
ch, it will dissipate a constant power, with the next value:
If p
d(t) is substituted in (18), the value of the thermal jump as a function of time, θ(t), can be obtained by simple integration, and it will have the following function:
The value θ
0 in (21) is the initial thermal jump, and τ
TH being the cells’ thermal time constant, measured in seconds, and equal to the product of the thermal resistance, R
TH, multiplied by the thermal capacity, C
TH. If the cell is charged and discharged with the same current, I
ch, after a long time (between five and seven times the value of τ
TH), the exponential function will have practically been extinguished, thus reaching a stabilized thermal jump, so that the final temperature of the cell will converge to the following value:
The value given in (22) appears in the datasheets of the commercial cells provided by manufacturers and is usually indicated for various values of the Ich current.
Since the energy transfer from the charger cells to the electric vehicle cells will take only a few seconds, the ambient temperature will be considered to remain constant in that short interval of time. For each individual cell from one of the n
pc parallel branches that the charger has, whose thermal parameters (thermal resistance and capacitance) are R
TH and C
TH, respectively, the following ordinary differential equation of constant coefficients can be established, from which the thermal jump, θ(t), can be obtained during the vehicle charging process:
Substituting the value of the current, i
sc(t), in (23), for its time expression given in (12), yields the following equation:
The ODE given in (24) can easily be transformed into an exact differential equation if it is multiplied by an integrating factor that depends only on time, whose value is as follows:
In this way, the general solution of the equation can be obtained, and the result of which is as follows:
In θ(t), C is the integration constant, which depends on the value of the initial thermal jump. Assuming that θ (t = 0) = θ
0, that constant has the next value:
In order to simplify the final expression of θ(t), the following constants can be defined:
The constant k has units [s
−1], the constant k
1 has units [°C∙s
2], and the constants k
θ1 and k
θ2 are both measured in [°C]. By means of these values, the thermal jump, θ(t), is expressed in a simplified way by the following time function:
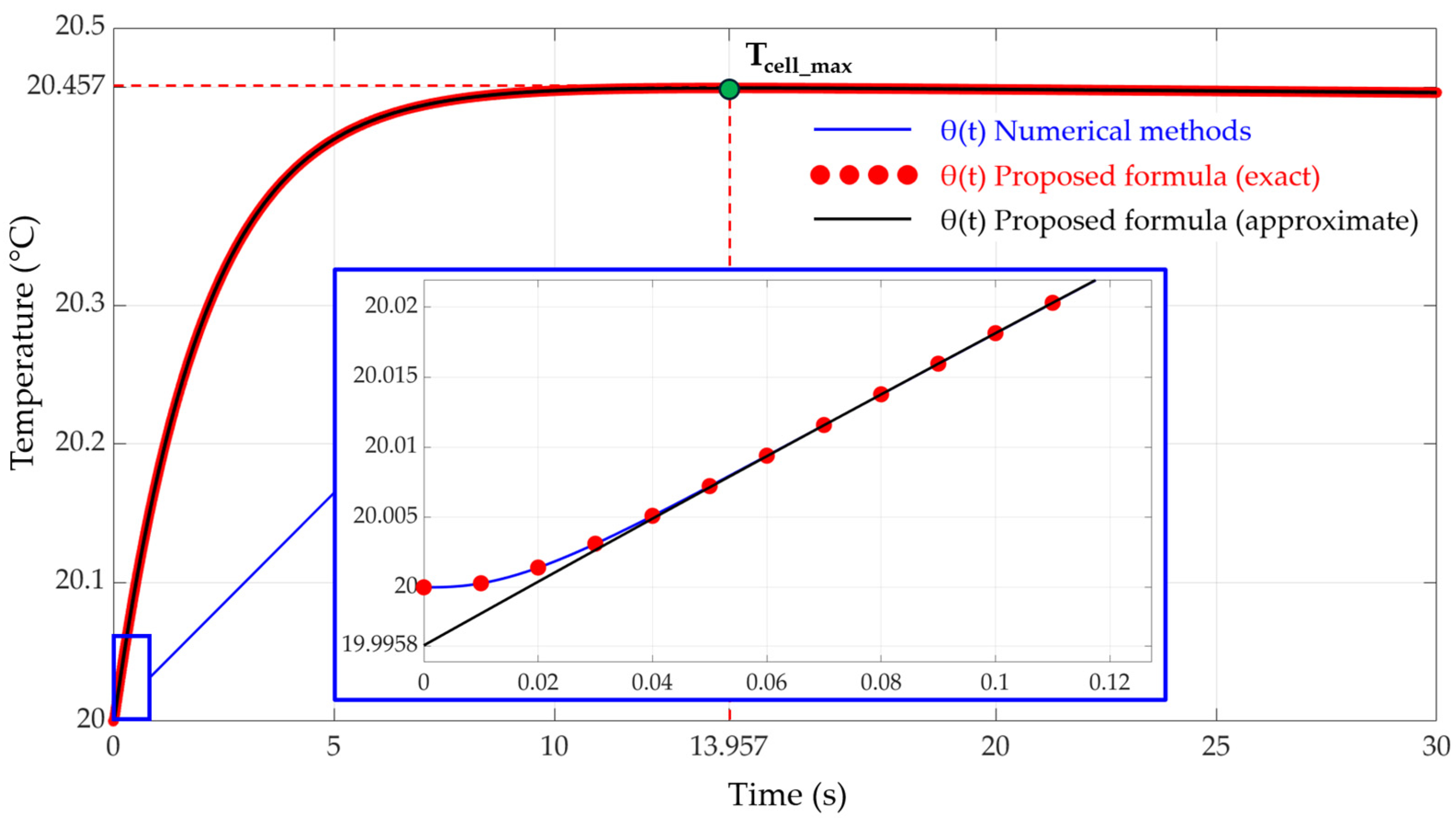
This solution gives the same results as if it were solved (24) by numerical methods, without making any approximation. In general, the values of α and β that appear in the function θ(t) have a high value. In addition, α is slightly higher than β. This means that the terms where the exponents of exponential functions are (
2∙(α + β)∙t) and (
2∙α∙t) decay to zero very quickly, even with very low time values, in the order of milliseconds. For times greater than 1 s, both exponential functions will have practically disappeared, so the thermal jump, θ(t), can be evaluated by the following approximate function:
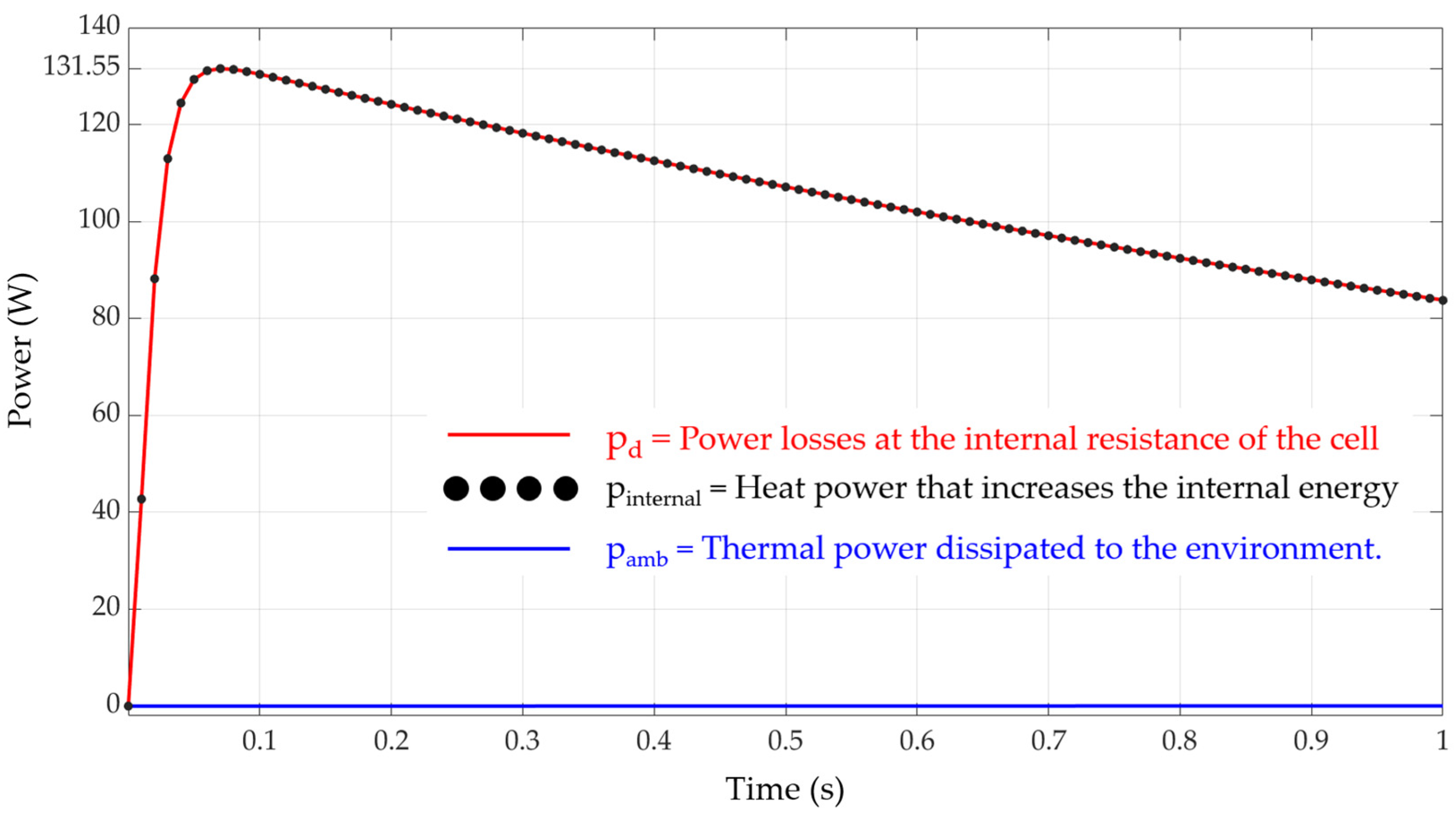
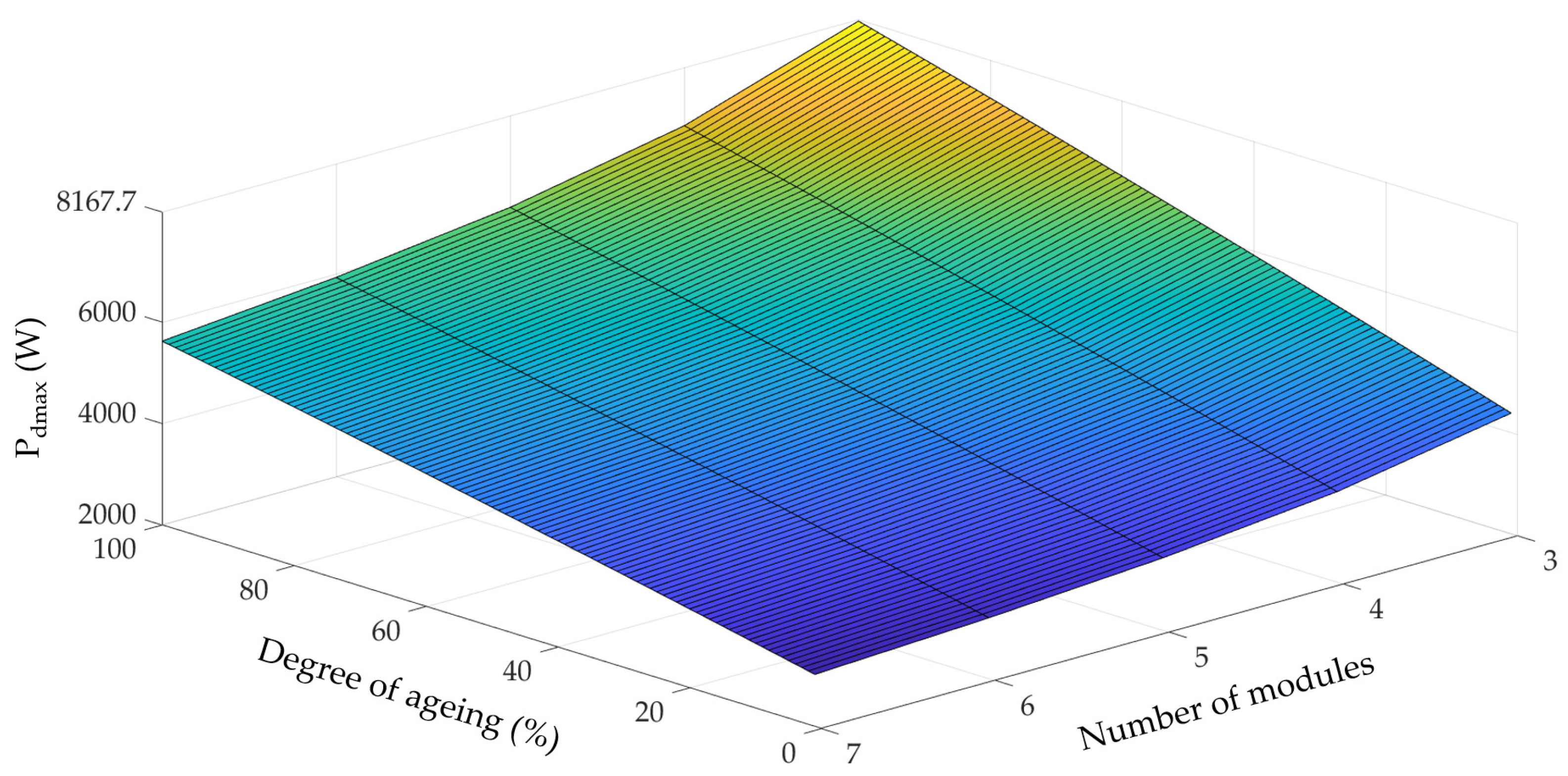
2.2.1. Internal Power and Power Dissipated to the Environment
The power that is dissipated to the environment expressed as a function of time is equal to the thermal jump divided by the thermal resistance of the cell, as follows:
The power used to raise the internal energy of the cell, i.e., to increase its temperature, is equal to the thermal capacitance multiplied by the derivative with respect to the time of the thermal jump.
In this application of fast chargers, it habitually happens that Pinternal (t) >> Pamb (t), because the discharge times are very short compared with the value of the thermal time constant of any cell in the set. This implies that almost all the power dissipated in the internal resistance of any cell, pd(t), will be used to raise its temperature and will hardly exchange thermal energy with the environment, so that the process can be considered practically adiabatic.
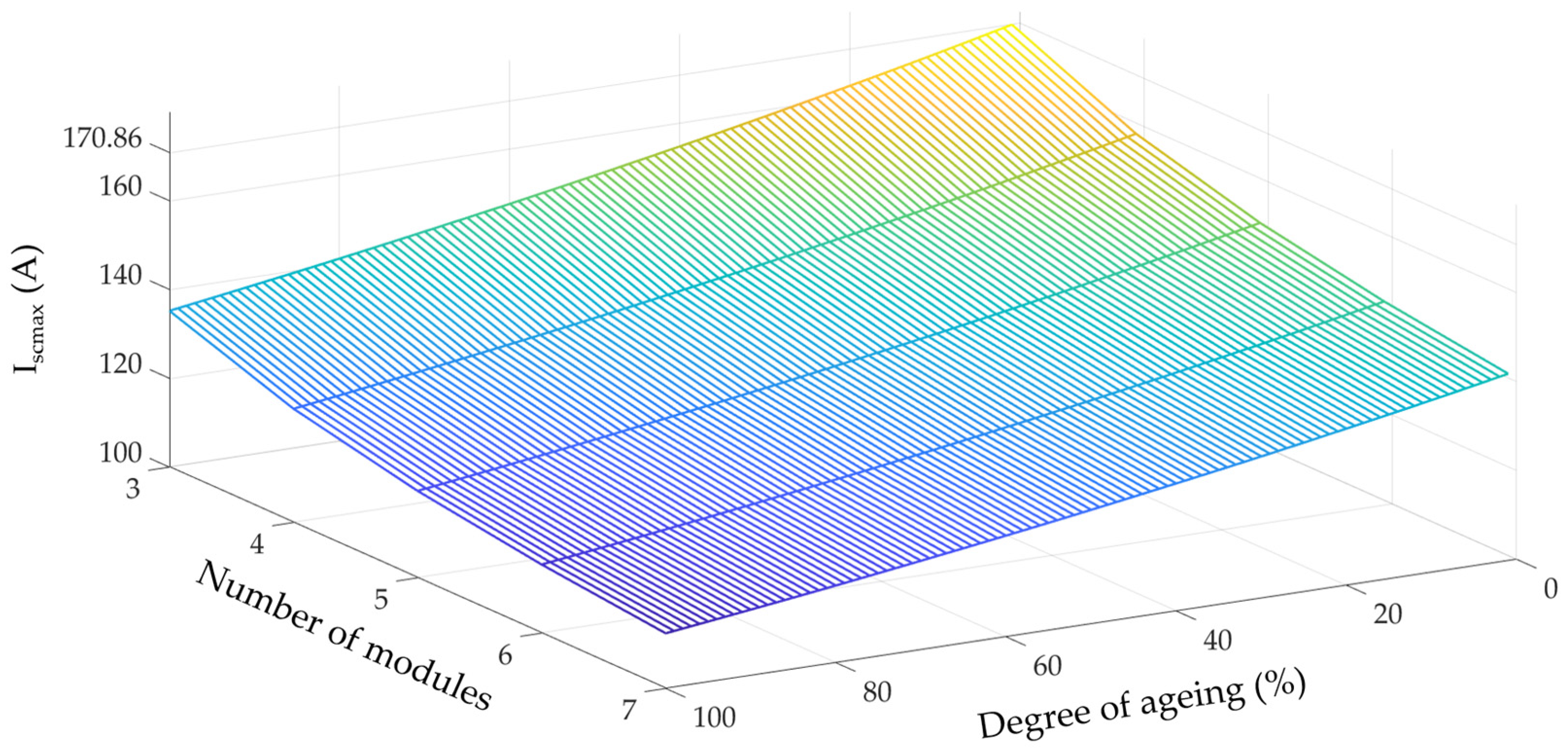
2.2.2. Maximum Temperature Reached during the Electrical Vehicle Charging Process
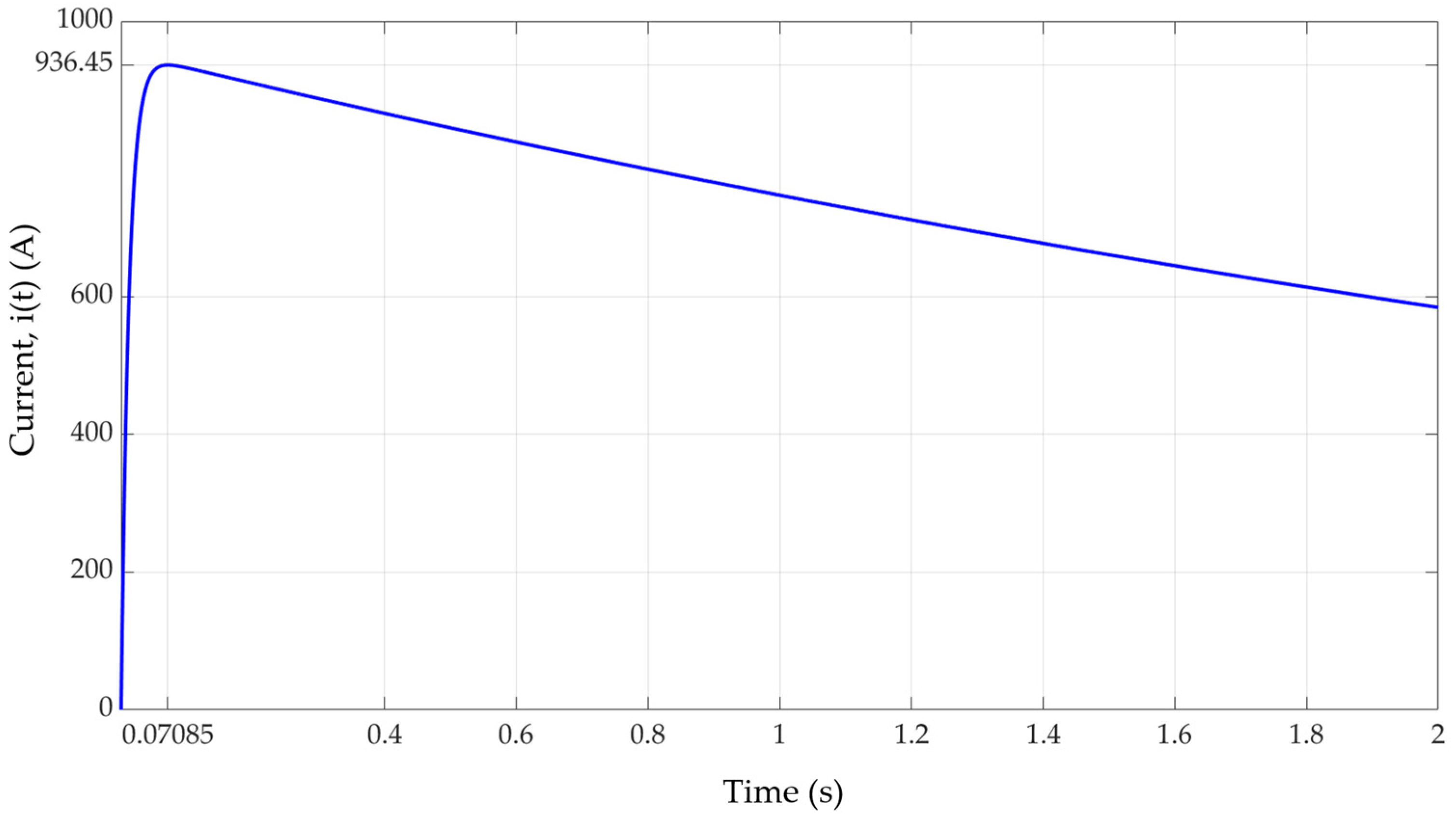
When the charger is connected to the electric vehicle, a sudden discharge occurs that results in a very high current peak (several hundred amps), which can cause the temperature of the cells, both the charger and the charge, to rise rapidly. It is important to know the maximum temperature that the SCs will reach, as this should not exceed, in most commercial cells, the value of 60 °C. Exceeding this limit would cause irreversible damage. The maximum temperature will take place at the same instant that the temperature jump is maximum. This instant will be denoted by t
θmax. Using the approximate expression given in (33), t
θmax can be obtained from the following equality:
Solving Equation (36) yields the value of time,
:
In expression (37), log(x) represents the natural logarithm of x. The maximum thermal jump is obtained by substituting the value of the given time in (37) into expression (33), after which the following result is obtained:
The constant δ in (38) is dimensionless and has the following value:
The maximum temperature reached by the cell will be equal to the ambient temperature plus this maximum thermal jump.
This formula can be applied to both charger and electric vehicle cells. If the maximum temperature of a charger cell is being evaluated, the calculation of the constant k1 given in (29) will put the number of parallel branches that the charger has at that time in the npc variable, since the total current passing through a branch of the charger will be equal to the total, i(t), divided by that number. If the temperature of an electric vehicle cell is being analyzed, for the same reason, in the calculation of k1, the npc value will be replaced by the npv value, which is the number of parallel branches of the vehicle’s SC bank. This calculation makes it possible to know if, during the discharge of energy from the charger to the vehicle, knowing the initial temperature of the cell analyzed and the ambient temperature, the cell could suffer an overheating that could be dangerous to its integrity.
2.2.3. Minimum, Average, and Maximum Temperature of Fast Charger Cells in TSS
As soon as the charger releases a part of its stored energy to the cells of the electric vehicle, after which it will have reached a final voltage, Ufinal, it must be recharged to recover the initial voltage, U01, and be ready to perform a new discharge on the next vehicle that arrives at the station. Therefore, the time available to the charger, which will be denoted by tch, to reach that U01 voltage again, starting from the Ufinal voltage, will be less than or equal to the time it takes for the next vehicle to arrive at the charging point. This time will be related to different mobility criteria and depends on many factors, such as the number of vehicles in the line, the average distance between one stop and the next, traffic conditions, the average arrival time that the transport company decides to set for a given stop, the estimated number of passengers to be transported on a route, or even the time of day. Knowing its value will require a complex study that is beyond the scope of this article; however, nowadays, in large cities, it is possible to establish direct communication between each vehicle and its next charging station. Depending on the circumstances at any given time, it is possible to estimate, in real time, how long it would take for a vehicle to reach its next stop. Since these times depend on many factors, this study will consider several values with which to draw conclusions.
Normally, the recharging of the fast charger will be carried out at a constant current, I
ch. If the time available for recharging is high, it can be done with a low current, which will improve performance. This will also make the average temperature of the charger’s SCs lower, which will extend its useful life. Therefore, in this application, it will be considered that the charger takes advantage of the maximum time it has, t
ch, to charge with the minimum possible current, since it is the best option, both from the thermal point of view and from the efficiency of the charging process. The value of the current I
ch needed to increase the voltage from U
final to U
01 at time t
ch is as follows:
In (41), it should be noted that the C1 value will depend on how many branches in parallel need to be recharged, since it is possible that not all of them would have been connected in the previous discharge to the electric vehicle, if the latter had arrived with a high initial voltage. The lower the Ufinal voltage and the shorter the available charging time, tch, the higher the Ich current.
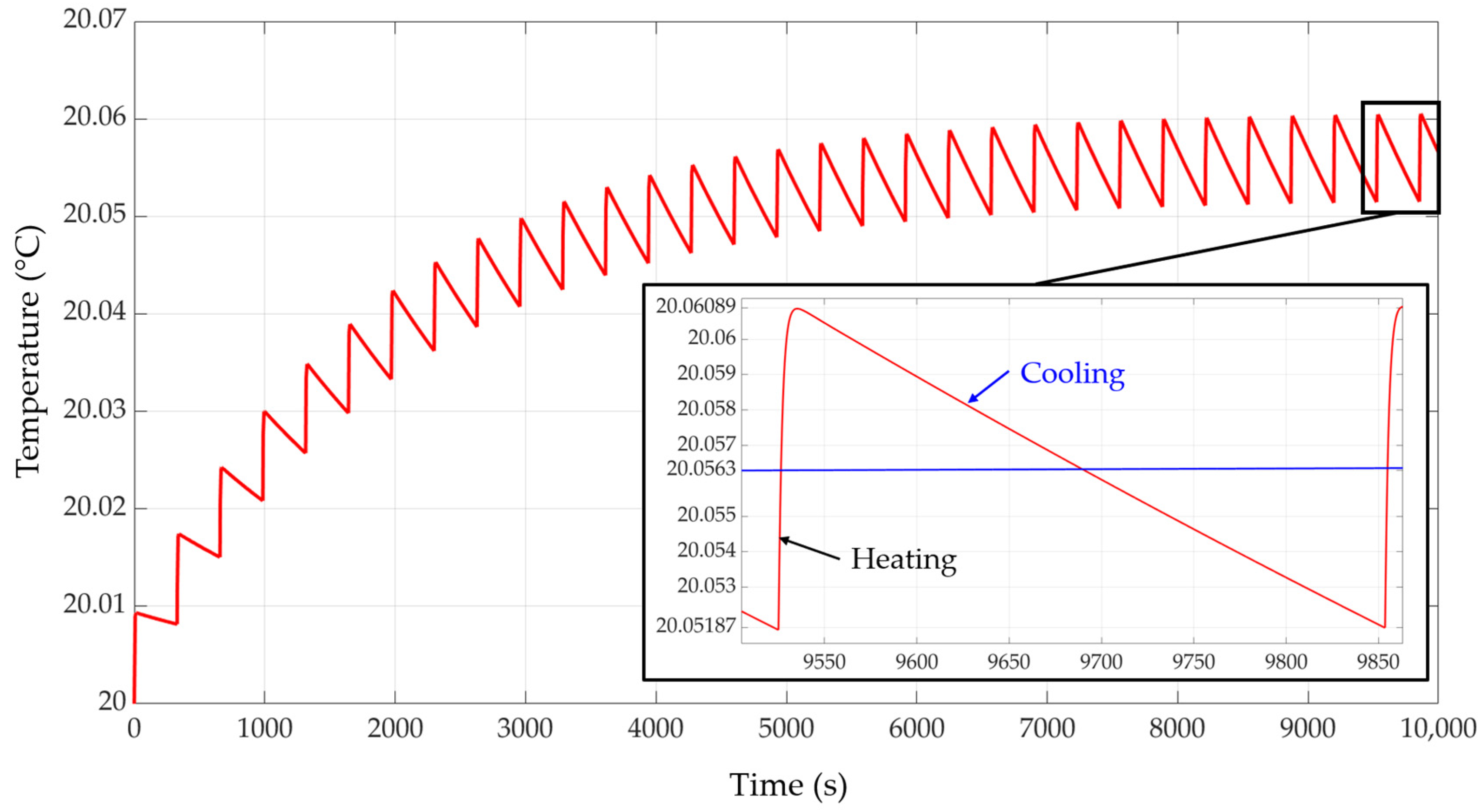
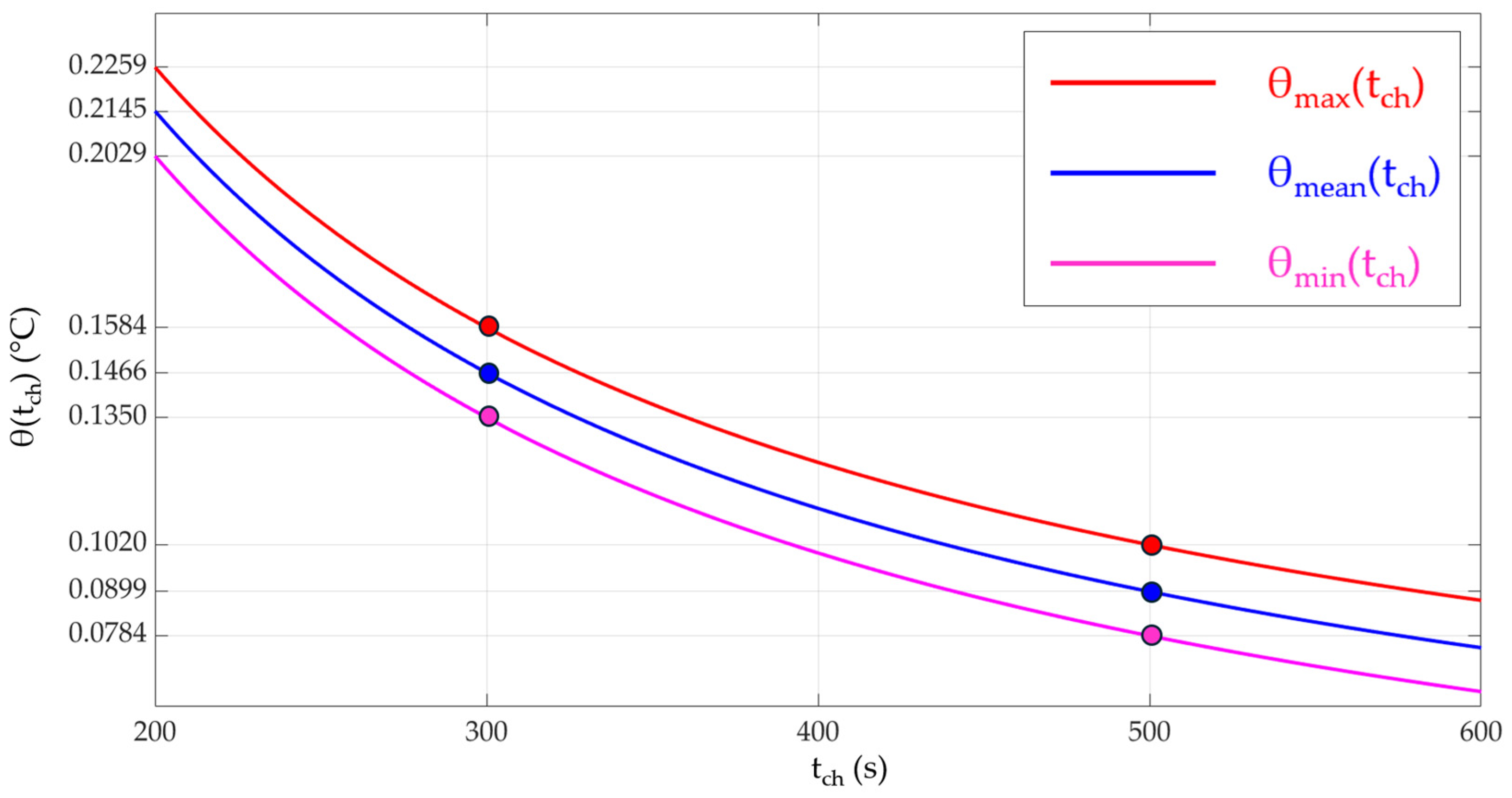
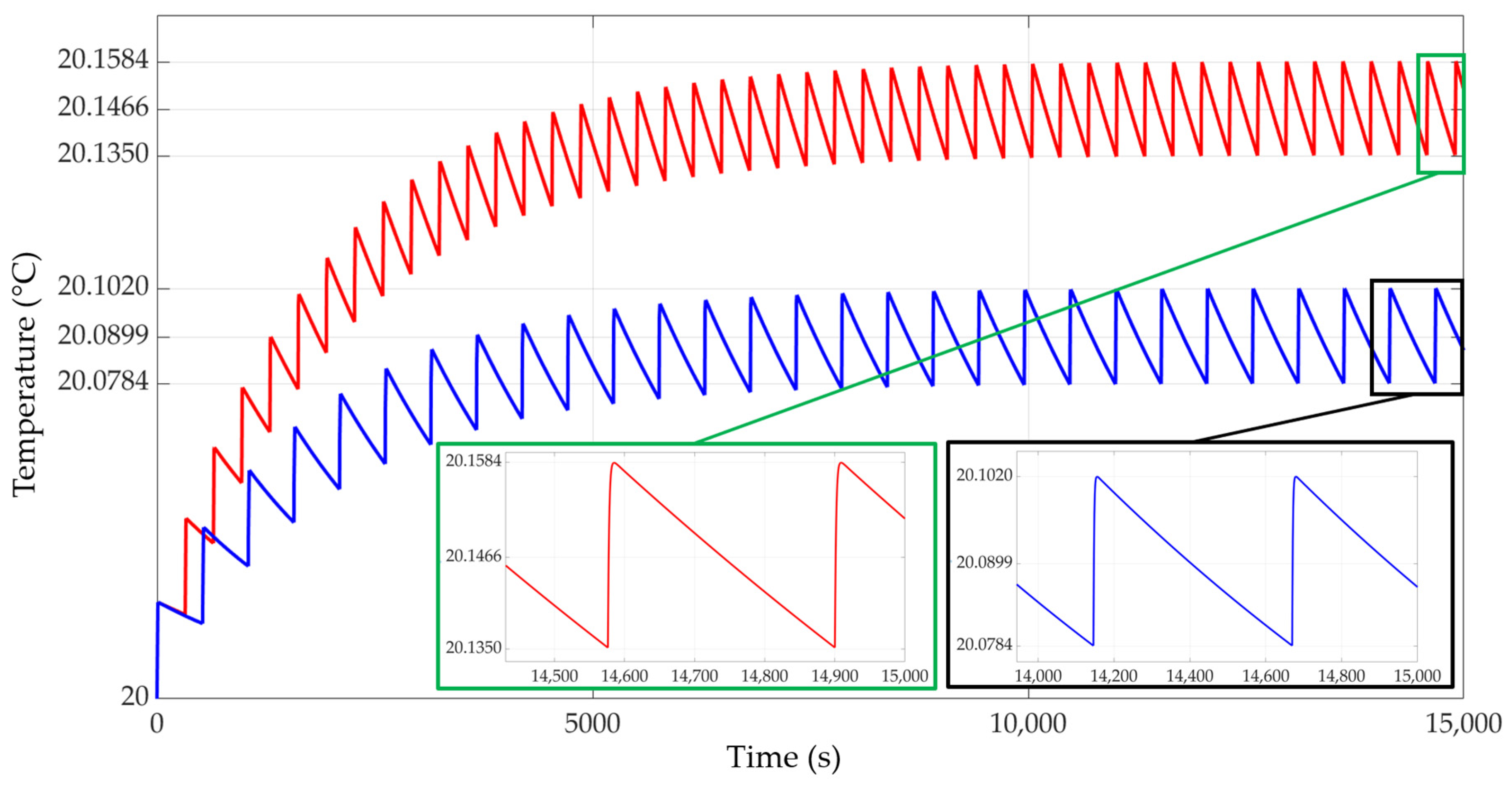
If the fast charger must supply energy to a fleet of vehicles that are constantly on the road, working 12 or more hours a day [
44], its cells will be cyclically subjected to constant charging currents and high discharge currents on the vehicles. If this is maintained over time, the TSS will be reached, in which the temperature of the charger cells will stabilize and oscillate around an average value, reaching a maximum at the end of the heating stage (during discharge to the electric vehicle) and a minimum at the end of charging from the grid at a constant current. The maximum, minimum, and average temperature values will depend on the time available to recharge from the main supply source, t
ch, and the ambient temperature, among other factors.
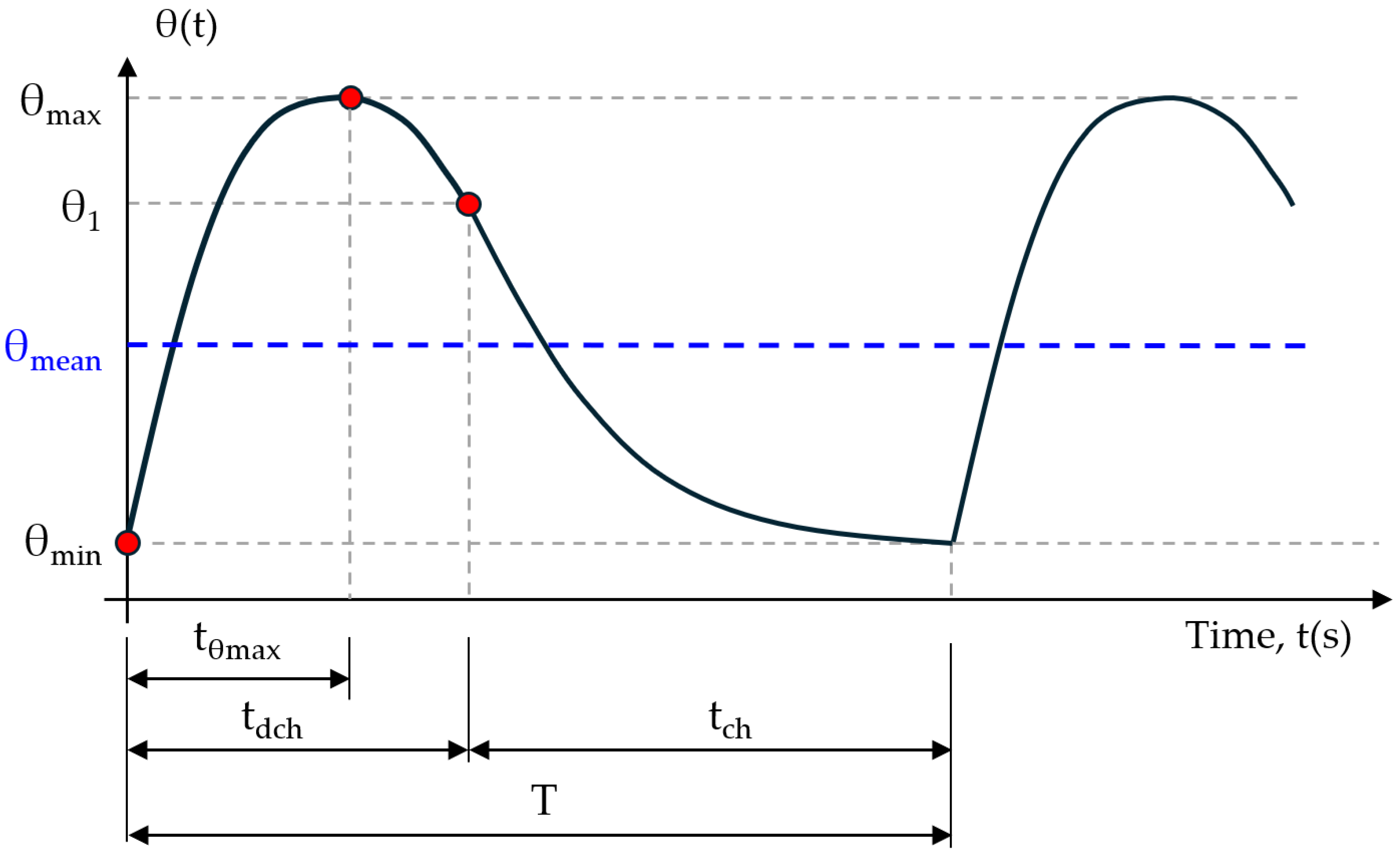
If the charger cells are in TSS with a minimum thermal jump θ
min, and at that moment they transfer back their energy on the vehicle cells, when the discharge time, t
dch, has elapsed, they will have reached a thermal jump θ
1, which, in general, will not be equal to the maximum value (this last one shall take place at the instant
< t
dch) (
Figure 5). Next, if the cells of the charger are recharged from the grid with a constant current of value I
ch, a current of value I
ch/n
pc will flow through each cell of a string, where n
pc is the number of parallel branches the charger has at that moment. Considering that, as soon as the charging process from the grid is finished, the energy is transferred back into a vehicle arriving at the station, without intermediate rest intervals, after the charging time, t
ch, the cells will have cooled down to the initial value, θ
min, and the process will be repeated cyclically. Under these circumstances, the current and temperature waves in a cell of the charger will be periodic functions of the period T = t
ch + t
dch.
Figure 5 shows the thermal jump evolution once the TSS is reached.
In order to obtain the value θ
min, it is necessary to solve the following system of equations:
The value θ
1 is not important, although this additional equation is necessary to determinate θ
min, which in turn will be needed to calculate the maximum thermal jump, θ
max, and the mean thermal jump, θ
mean, which are the ones that are important to know. In this case, the approximate function for the calculation of θ(t) has been used (33), in the vehicle discharging phase, since, at the instant t
dch, the difference between the value provided by this function and the one obtained with the exact formula (32) is practically zero. Solving the system given in (42) gives the following result for θ
1 and θ
min:
In both θ
1 and θ
min, the term of the exponential function whose exponent is negative and of a very high absolute value has been neglected since it is practically zero. To obtain the maximum thermal jump, θ
max, it must be taken into account that the function θ(t) during the heating phase can be expressed as follows:
The maximum value can be calculated from Formulae (38) and (39) by simply replacing the initial thermal jump, θ
0, by the minimum thermal jump, θ
min, given in (44). The mean thermal jump, θ
mean, that the cell will reach can be obtained by considering the function of power dissipated in the cell as a function of time. This function can be defined in sections as follows:
The mean dissipated power will then be given by the following integral:
Solving (47) and taking into account that, for the instant t
dch, the value of the function exp(−2∙α∙t
dch) can be considered practically zero, it is finally concluded that the mean value of the power dissipated is as follows:
The mean thermal jump will be equal to the product of the mean dissipated power and the thermal resistance. Substituting the values of α and β according to expressions (9) and (11), it finally follows that
The mean temperature of the analyzed cell will then be as follows:



 ,
, 
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}