Passive Tracking of the Electrochemical Impedance of a Hybrid Electric Vehicle Battery and State of Charge Estimation through an Extended and Unscented Kalman Filter


Abstract
:1. Introduction
2. Impedance Estimation Method
2.1. Linear and Time-Invariant Hypothesis
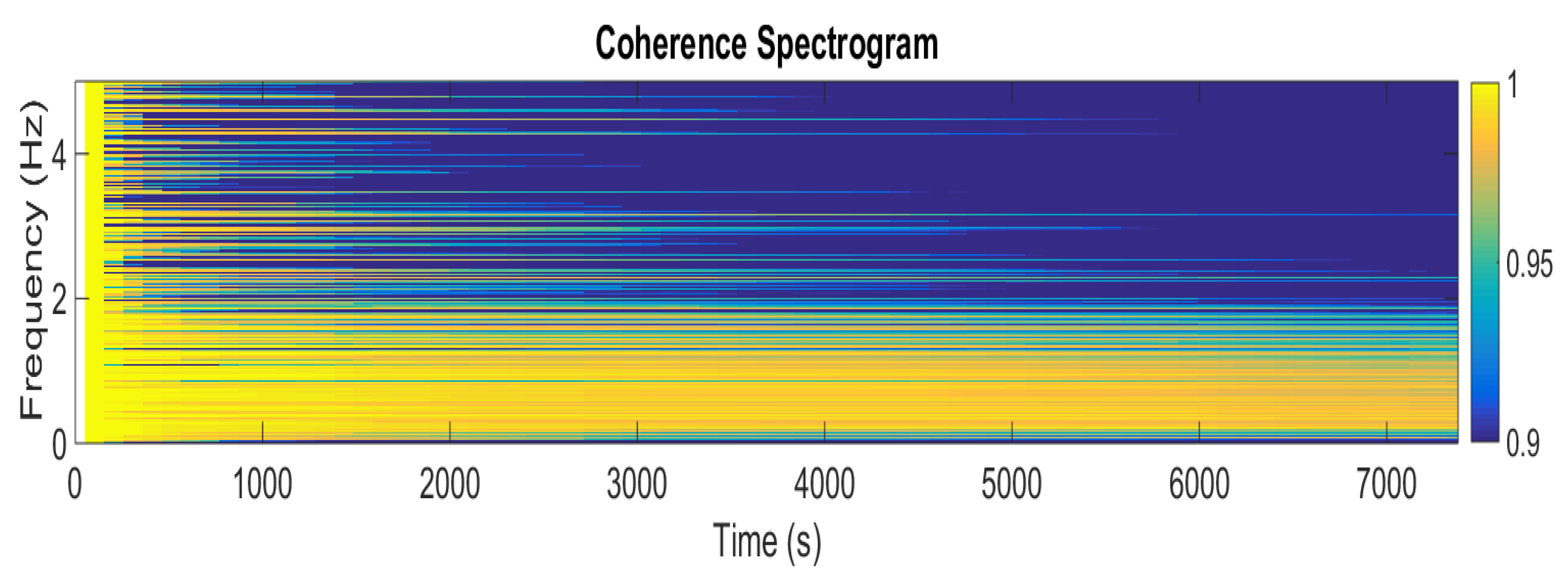
2.2. Coherence
2.3. Impedance Estimation in Frequency Domain
2.4. Impedance Estimation in Time Domain
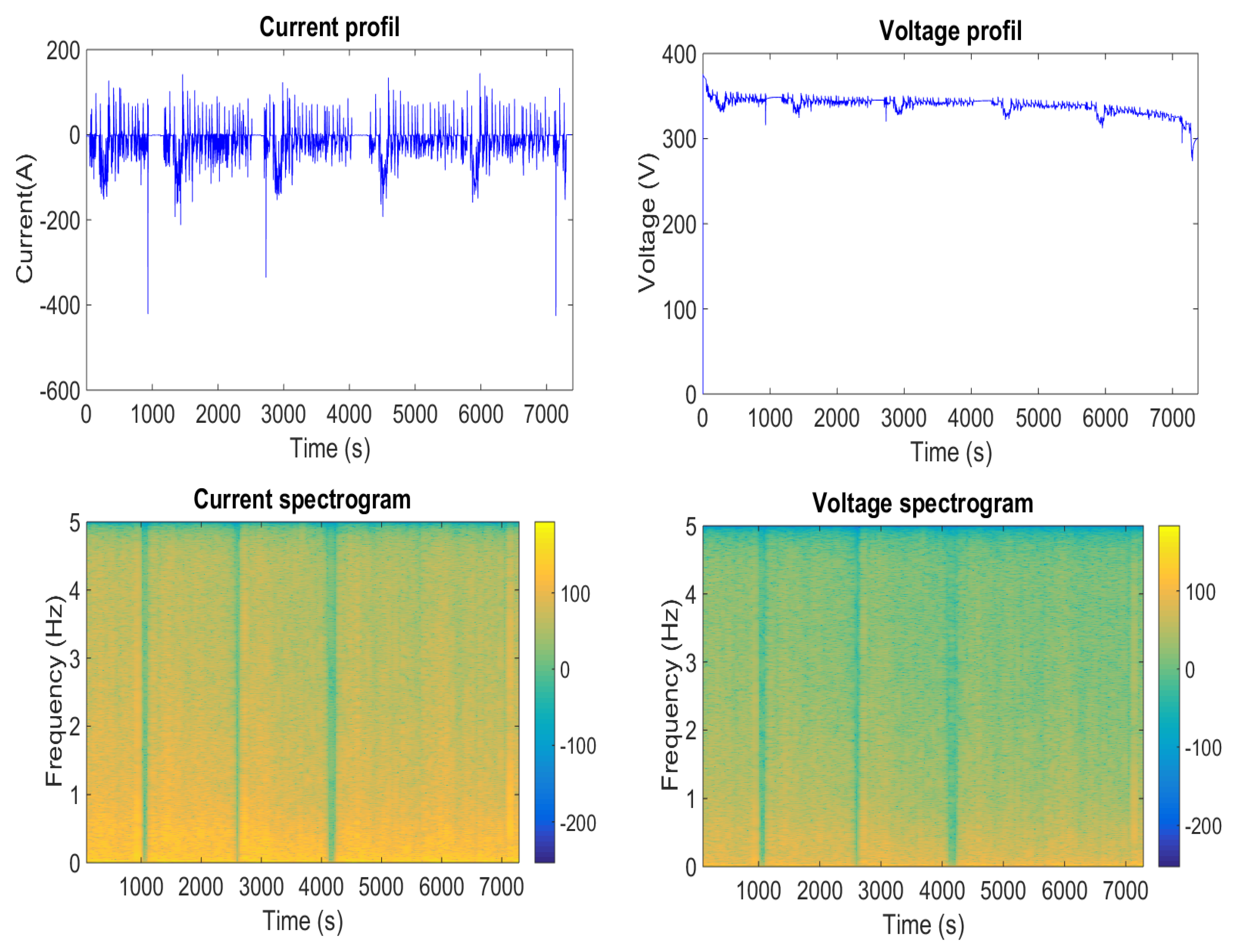
2.5. Experimental Protocol
2.6. Results and Discussion
3. SoC Estimation through EKF and UKF
3.1. Overview
3.2. EKF Algorithm
- (1)
- Initialize the original parameters
- (2)
- Estimate the predicted state
- (3)
- Update the estimated covariance
- (4)
- Compute the near-optimal Kalman gain
- (5)
- Update the estimated state
- (6)
- Predict the estimated covariance
- (7)
- Repeat the recursive filter calculation from step 2 to 6.
3.3. UKF Algorithm
- (1)
- Initialize the original parameters are the same as Equations (22) and (23).
- (2)
- For k calculate the sigma points for the state modelwhere L is the length of and is a scaling parameter that determines the spread of the sigma points around .
- (3)
- Propagate the sigma points through the state model
- (4)
- Calculate the propagated mean
- (5)
- Calculate the propagated covariance
- (6)
- For k calculate the sigma points for the measurement function
- (7)
- Propagate sigma points through the measurement function
- (8)
- Calculate the propagated mean
- (9)
- Calculate the estimated covariancewhere is used to incorporating prior knowledge of the distribution of x. For Gaussian distributions, is optimal.
- (10)
- Compute the Near-Optimal Kalman gain
- (11)
- Update the estimated state
- (12)
- Predict the estimated covariance
- (13)
- D the recursive filter calculation from step 2 to 12.
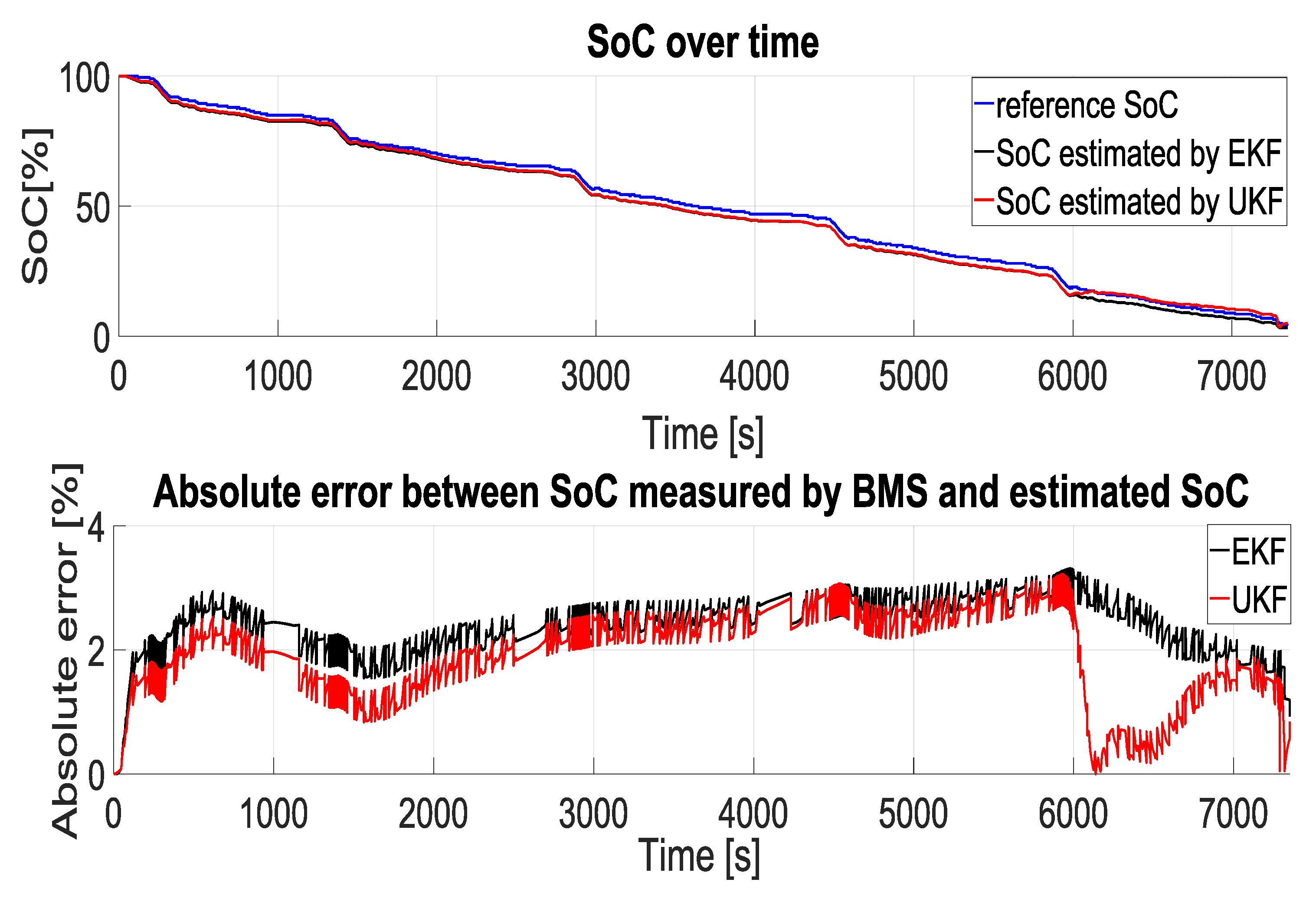
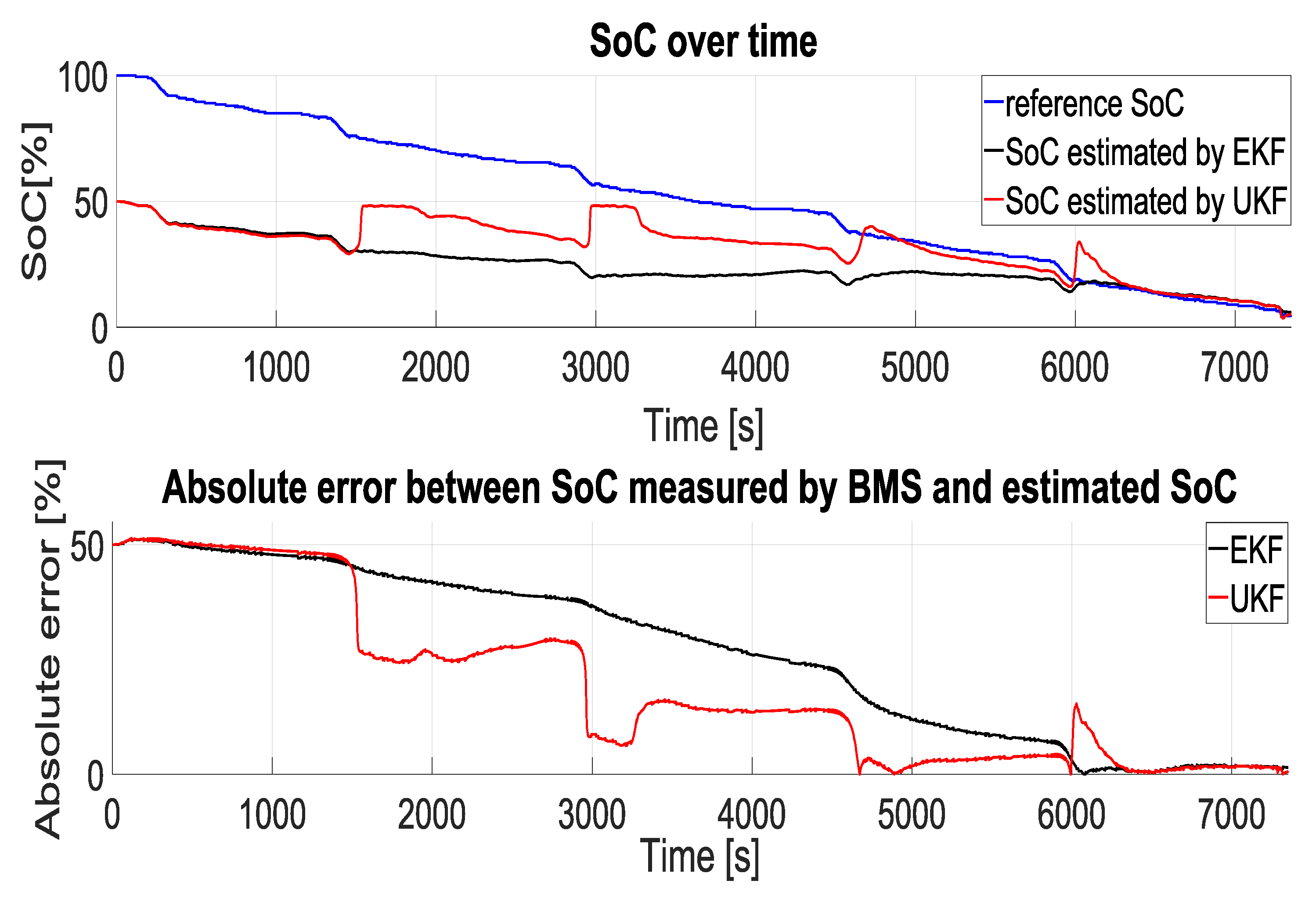
3.4. Results and Discussion
4. Conclusions
5. Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| Symbol | Name | Units |
| Frequency domain | - | |
| Laplace domain | - | |
| Continuous time domain | - | |
| k | Discrete-time domain | - |
| m | mth element of a vector | - |
| Order of the battery impedance model | - | |
| ns | Selected order of the battery impedance model | - |
| ^ | Estimate | - |
| * | Complex conjugate | - |
| Impedance estimation notation | Units | |
| Cross power spectral density | (W) | |
| Power spectral density of the current | (W) | |
| Power spectral density of the voltage | (W) | |
| Battery impedance | (Ω) | |
| Spectral coherence | - | |
| Battery voltage | (V) | |
| Voltage of the mth RC node of the battery model | (V) | |
| Battery current | (A) | |
| Cross periodogram between the current and voltage | - | |
| A | Normalization factor | - |
| Forgetting factor | - | |
| Numerator coefficient of the battery impedance | - | |
| Denominator coefficient of the battery impedance | - | |
| Residues of the partial fraction expansion | - | |
| Poles of the partial fraction expansion | - | |
| Direct term of the partial fraction expansion | - | |
| Series resistance of the battery impedance model | (Ω) | |
| mth resistance of the battery impedance model | (Ω) | |
| mth capacity of the battery impedance model | (F) | |
| Dimension of the estimated impedance | - | |
| Phase root mean square error | (°) | |
| Modulus root mean square error | (Ω) | |
| Sampling time | (s) | |
| Kalman filter notation | ||
| State variable | ||
| Measured variable | ||
| Input variable | ||
| State function | ||
| Measurement function | ||
| System noise | ||
| Measurement noise | ||
| System noise covariance matrix | ||
| Measurement noise covariance matrix | ||
| State estimation error covariance matrix | ||
| State function matrix | ||
| Jacobian matrix | ||
| Kalman gain matrix | ||
| Sigma points vector | ||
| Dimension of x | ||
| Scaling parameter | ||
| Mean sigma points weights | ||
| Covariance sigma points weights | ||
| β | Scaling parameter | |
| Scaling parameter determining the spread of sigma points | ||
References
- Wakihara, M.; Yamamoto, O. Lithium Ion Batteries: Fundamentals and Performance; Wiley-VCH: New York, NY, USA, 1998. [Google Scholar]
- Matsuki, K.; Ozawa, K. General Concepts. In Lithium Ion Rechargeable Batteries: Materials, Technology, and New Applications; Ozawa, K., Ed.; Wiley-VCH: Weinheim, Germany, 2010. [Google Scholar]
- Andrea, D. Battery Management Systems for Large Lithium-Ion Battery Packs; Artech House: Boston, MA, USA, 2010. [Google Scholar]
- Panchal, S.; Khasow, R.; Dincer, I.; Agelin-Chaab, M.; Fraser, R.; Fowler, M. Numerical modeling and experimental investigation of a prismatic battery subjected to water cooling. Numer. Heat Transf. Appl. 2017, 71, 626–637. [Google Scholar] [CrossRef]
- Panchal, S. Impact of Vehicle Charge and Discharge Cycles on the Thermal Characteristics of Lithium-Ion Batteries. Master’s Thesis, University of Waterloo, Waterloo, ON, Canada, 2014. [Google Scholar]
- Coleman, M.; Lee, C.K.; Zhu, C.; Hurley, W. State of charge determination from EMF voltage estimation: Using impedance, terminal voltage, and current for lead-acid and lithium-ion batterie. IEEE Trans. Ind. Electron. 2007, 54, 2550–2557. [Google Scholar] [CrossRef]
- Howey, D.; Yufit, V.; Mitcheson, G.; Offer, G.; Brandon, N. Impedance measurement for advanced battery management system. In Proceedings of the EVS International Battery, Hybrid and Fuel Cell Vehicle Symposium, Barcelona, Spain, 17–20 November 2013; pp. 1–7. [Google Scholar]
- Zhu, J.; Sun, Z.; Wei, X.; Dai, H. A new lithium battery internal temperature in-line estimate based on electrochemical impedance spectroscopy measurement. J. Power Sources 2015, 274, 990–1004. [Google Scholar] [CrossRef]
- Richardson, R.; Ireland, P.; Howey, D. Battery internal temperature estimation by combined impedance and surface temperature measurement. J. Power Sources 2014, 265, 254–261. [Google Scholar] [CrossRef]
- Schmidt, J.-P.; Arnold, S.; Loges, A.; Werner, D.; Wetzel, T.; Ivers-Tiffe, E. Measurement of the internal temperature via impedance: Evaluation and application of a new method. J. Power Sources 2013, 243, 110–117. [Google Scholar] [CrossRef]
- Bundy, K.; Karlsson, M.; Lindbergh, G.; Lundqviste, A. An electrochemical impedance spectroscopy method for prediction of the state of charge of a nickel metal hybride battery at open circuit and during discharge. J. Power Sources 1998, 72, 118–125. [Google Scholar] [CrossRef]
- Rodrigues, S.; Munichandraiah, N.; Shukla, A. A review of state of charge indication of batteries by means of a.c. impedance measurements. J. Power Sources 2000, 87, 12–20. [Google Scholar] [CrossRef]
- Blankem, H.; Bohlen, O.; Buller, S.; Doncker, R.; Fricke, B.; Hammounche, A.; Linzen, D.; Thele, M.; Sauer, D. Impedance measurements on lead acid batteries for state of charge and state of health and cranking capability prognosis in electric and hybrid electrical vehicles. J. Power Sources 2005, 144, 418–425. [Google Scholar] [CrossRef]
- Troltzsch, U.; Kanoun, O.; Trankler, H. Characterizing aging effects of lithium batteries by impedance spectroscopy. Electrochim. Acta 2006, 51, 1664–1672. [Google Scholar] [CrossRef]
- Barsoukov, E.; Macdonald, J.R. Impedance Spectroscopy: Theory, Experiment, and Applications; Wiley: Hoboken, NJ, USA, 2005. [Google Scholar]
- Orazem, M.; Tribolle, B. Electrochemical Impedance Spectroscopy; Prentice Hall: Upper Saddle River, NJ, USA, 2011. [Google Scholar]
- Ljung, L. System Identification: Theory for the User; Prentice Hall: Upper Saddle River, NJ, USA, 1999. [Google Scholar]
- Jiangwei, L.; Mazzola, M.S. Accurate battery pack modeling for automotive applications. J. Power Sources 2013, 237, 215–228. [Google Scholar]
- Hélène, P.; Granjon, P.; Guillet, N.; Cattin, V. Tracking of electrochemical impedance of batteries. J. Power Sources 2016, 312, 60–69. [Google Scholar]
- Piret, H.; Sockeel, N.; Heiries, V.; Michel, P.H.; Ranieri, M.; Cattin, V.; Guillet, N.; Granjon, P. Passive and active tracking of electrochemical impedance of a drone battery. In Proceedings of the EEVC European Battery, Hybrid and Fuel Cell Electric Vehicle Congress, Brussels, Belgium, 1–4 December 2015. [Google Scholar]
- Sockeel, N.; Ball, J.; Shahverdi, M.; Mazzola, M. Passive tracking of the electrochemical impedance of a hybrid electric vehicle battery and state of charge estimation through an extended Kalman filter. In Proceedings of the IEEE Transportation Electrification Conference and Expo (ITEC), Chicago, IL, USA, 22–24 June 2017. [Google Scholar]
- Eberke, U.; Helmolt, R.V. Sustainable transportation based on electric vehicle concepts: A brief overview. Energy Environ. Sci. 2010, 3, 689–699. [Google Scholar] [CrossRef]
- Acello, R. Getting into gear with the vehicle of the future. San Diego Bus. J. 1997, 18, 15. [Google Scholar]
- Mitsubishi Motors. Specifications. Available online: https://www.mitsubishi-motors.com/en/showroom/i-miev/specifications (accessed on 6 October 2018).
- Tesla. Tesla Model S. Available online: https://www.tesla.com/models (accessed on 6 October 2018).
- Xiong, R.; Cao, J.; Yu, Q.; He, H.; Sun, F. Critical Review on the Battery State of Charge Estimation Methods for Electric Vehicles. IEEE Battery Enrgy Storage Manag. Syst. 2017, 6, 1832–1843. [Google Scholar] [CrossRef]
- Ng, K.S.; Moo, C.S.; Chen, Y.P.; Hsieh, Y.C. Enhanced coulomb counting method for estimating state-of-charge and state-of-health of lithium-ion batteries. Appl. Energy 2009, 86, 1506–1511. [Google Scholar] [CrossRef]
- Yan, J.; Xu, G.; Qian, H.; Xu, Y. Robust state of charge estimation for hybrid electric vehicles: Framework and algorithms. Energies 2010, 3, 1654–1672. [Google Scholar] [CrossRef]
- Pop, V.; Bergveld, H.J.; Notten, P.H.L.; Regtien, P.P.L. State of the art of battery state of charge determination. Meas. Sci. Technol. 2005, 16, 93–110. [Google Scholar] [CrossRef]
- Kozlowski, J.D. Electrochemical cell prognostics using online impedance measurements and model-based data fusion techniques. In Proceedings of the IEEE Aerospace Conference, Proceeding, Big Sky, MT, USA, 8–15 March 2003. [Google Scholar]
- Shen, W.X.; Chan, C.C.; Lo, E.W.C.; Chau, K.T. A new battery available capacity indicator for electric vehicles using neural network. Energy Convers. Manag. 2002, 43, 817–826. [Google Scholar] [CrossRef]
- Li, I.H.; Wei-Yen, W.; Shin-Feng, S.; Yuang-Shung, L. A merged fuzzy neural network and its applications in battery state of charge estimation. IEEE Trans. Energy Convers. 2007, 22, 697–708. [Google Scholar] [CrossRef]
- Lee, Y.S.; Wang, W.Y.; Kuo, T.Y. Soft computing for battery state of charge (BSOC) estimation in battery string systems. IEEE Trans. Ind. Electr. 2008, 55, 229–239. [Google Scholar] [CrossRef]
- Cheng, B.; Bai, Z.; Cao, B. State of charge estimation based on evolutionary neural network. Energy Convers. Manag. 2008, 49, 2788–2794. [Google Scholar]
- Weigert, T.; Tian, Q.; Lian, K. State of charge prediction of batteries and battery-supercapacitor hybrids using artificial neural networks. J. Power Sources 2011, 196, 4061–4066. [Google Scholar] [CrossRef]
- Hansen, T.; Wang, C.J. Support vector based battery state of charge estimator. J. Power Sources 2005, 141, 351–358. [Google Scholar] [CrossRef]
- Shi, Q.; Zhang, C.; Cui, N. Estimation of battery state of charge using v-support vector regression algorithm. Int. J. Autom. Technol. 2008, 9, 759–764. [Google Scholar] [CrossRef]
- Pattipati, B.; Sankavaram, C.; Pattipati, K.R. System identification and estimation framework for pivotal automotive battery management system characteristics. IEEE Trans. Syst. Man Cybern. C Appl. Rev. 2011, 41, 869–884. [Google Scholar] [CrossRef]
- Lotfi, N.; Landers, R.G.; Li, J.; Park, J. Reduced-order electrochemical model-based SoC observer with output model uncertainty estimation. IEEE Transm. Control Syst. Technol. 2017, 25, 1217–1230. [Google Scholar] [CrossRef]
- Satadru, D.; Ayalew, B.; Pisu, P. Nonlinear robust observers for state-of-charge estimation of lithium-ion cells based on a reduced electrochemical model. IEEE Trans. Control Syst. Technol. 2015, 23, 1935–1942. [Google Scholar]
- Fang, H.; Wang, Y.; Sahinoglu, Z.; Wada, T.; Hara, S. State of charge estimation for lithium-ion batteries: An adaptive approach. Control Eng. Pract. 2014, 25, 45–54. [Google Scholar] [CrossRef]
- Plett, G.L. Extended Kalman filtering for battery management systems of lipb-based hev battery packs: Part 1. Background. J. Power Sources 2004, 134, 252–261. [Google Scholar] [CrossRef]
- Plett, G.L. Extended Kalman filtering for battery management systems of lipb-based hev battery packs: Part 2. Modeling and identification. J. Power Sources 2004, 134, 262–276. [Google Scholar] [CrossRef]
- Plett, G.L. Extended Kalman filtering for battery management systems of lipb-based hev battery packs: Part 3. State and parameter estimation. J. Power Sources 2004, 134, 277–292. [Google Scholar] [CrossRef]
- Lee, J.; Nam, O.; Cho, B.H. li-ion battery SOC estimation method based on the reduced order extended Kalman filtering. J. Power Sources 2007, 174, 9–15. [Google Scholar] [CrossRef]
- Hu, C.; Youn, B.D.; Chung, J. A multiscale framework with extended Kalman filter for lithium-ion battery SOC and capacity estimation. Appl. Energy 2012, 92, 694–704. [Google Scholar] [CrossRef]
- He, H.; Xiong, R.; Zhang, X.; Sun, F.; Fan, J. State of charge estimation of the lithium-ion battery using an adaptive extended kalman filter based on an improved thevenin model. IEEE Trans. Veh. Technol. 2011, 60, 1461–1469. [Google Scholar]
- Chen, C.; Zhang, B.; Vachtsevanos, G.; Orchard, M.M. Machine condition prediction based on adaptive neuro-fuzzy and high-order particle filtering. IEEE Trans. Ind. Electr. 2011, 58, 4353–4364. [Google Scholar] [CrossRef]
- Chen, C.; Vachtsevanos, G.; Orchard, M. Machine remaining useful life prediction based on adaptive neuro-fuzzy and high-order particle filter. In Proceedings of the PHM Society Annual Conference of the Prognostics and Health Management Society, Portland, OR, USA, 10–16 October 2010. [Google Scholar]
- He, W.; Williard, N.; Osterman, M.; Pecht, M. Prognostics of lithium-ion batteries based on Dempster-Shafer theory and the Bayesian Monte Carlo method. J. Power Sources 2011, 196, 10314–10321. [Google Scholar] [CrossRef]
- Wan, E.A.; van der Merwe, R. The unscented Kalman filter for nonlinear estimation. In Proceedings of the IEEE Adaptive Systems for Signal Processing Communications, and Control Symposium (AS-SPCC), Lake Louise, AB, Canada, 1–4 October 2000. [Google Scholar]
- Julier, S.J.; Uhlmann, J.K.; Durrant-Whyte, H.F. A new approach for filtering nonlinear systems. In Proceedings of the IEEE American Control Conference (ACC), Seattle, WA, USA, 21–23 June 1995; Volume 3, pp. 1628–1632. [Google Scholar]
- Julier, S.J.; Uhlmann, J.K. New extension of the kalman filter to nonlinear systems. In Proceedings of the SPIE Signal Processing, Sensor Fusion, and Target Recognition VI, Orlando, FL, USA, 21–24 April 1997; Volume 3068. [Google Scholar]
- Pintelon, R.; Schoukens, J. System Identification: A Frequency Domain Approach; Wiley: Hoboken, NJ, USA, 2012. [Google Scholar]
- Shin, K.; Hammond, J. Fundamentals of Signal Processing for Sound and Vibration Engineers; Wiley: Hoboken, NJ, USA, 2008. [Google Scholar]
- Bendat, J.S.; Piersol, A.G. Random Data Analysis and Measurement Procedures, 4th ed.; Wiley: Hoboken, NJ, USA, 2010. [Google Scholar]
- Mazzola, M.S.; Shahverdi, M. Li-Ion Battery Pack and Applications. In Rechargeable Batteries; Zhang, Z., Zhang, S.S., Eds.; Springer International Publishing: New York City, NY, USA, 2015; pp. 455–476. [Google Scholar]
- Einhorn, M.; Conte, F.V.; Kral, C.; Fleig, J. Comparison, Selection, and Parametrization of Electrical Battery Models for Automotive Applications. IEEE Trans. Power Electr. 2013, 28, 1429–1437. [Google Scholar] [CrossRef]
- He, H.; Xiong, R.; Fan, J. Evaluation of Lithium-Ion Battery Equivalent Circuit Model for State of Charge Estimation by an Experimental Approach. Energies 2011, 4, 582–598. [Google Scholar] [CrossRef]
- MathWorks. Invfreqs. 2017. Available online: https://www.mathworks.com/help/signal/ref/invfreqs.html?searchHighlight=invfreqs&s_tid=doc_srchtitle (accessed on 12 October 2017).
- MathWorks. Residue. 2017. Available online: https://www.mathworks.com/help/matlab/ref/residue.html?searchHighlight=residue&s_tid=doc_srchtitle (accessed on 12 October 2017).
- Sockeel, N.; Shahverdi, M.; Mazzola, M.; Meadows, W. High-Fidelity Battery Model for Model Predictive Control Implemented into a Plug-In Hybrid Electric Vehicle. Batteries 2017, 3, 13. [Google Scholar] [CrossRef]
- Sockeel, N.; Shi, J.; Shahverdi, M.; Mazzola, M. Sensitivity analysis of the battery model for model predictive control implemented into a plug-in hybrid electric vehicle. In Proceedings of the IEEE Transportation Electrification Conference and Expo (ITEC), Chicago, IL, USA, 22–24 June 2017. [Google Scholar]
- Sockeel, N.; Shi, J.; Shahverdi, M.; Mazzola, M. Pareto front analysis of the objective function in model predictive based power management system of a plug-in hybrid electric vehicle. In Proceedings of the IEEE Transportation Electrification Conference and Expo (ITEC), Long Beach, CA, USA, 13–15 June 2018. [Google Scholar]
- Sockeel, N.; Shi, J.; Shahverdi, M.; Mazzola, M. Sensitivity analysis of the vehicle model mass for model predictive based power management system of a plug-in hybrid electric vehicle. In Proceedings of the IEEE Transportation Electrification Conference and Expo (ITEC), Long Beach, CA, USA, 13–15 June 2018. [Google Scholar]
- Shahverdi, M.; Mazzola, M.S.; Grice, Q.; Doude, M. Pareto Front of Energy Storage Size and Series HEV Fuel Economy Using Bandwidth-Based Control Strategy. IEEE Trans. Transp. Electrif. 2016, 2, 36–51. [Google Scholar] [CrossRef]
- Shahverdi, M.; Mazzola, M.; Sockeel, N.; Gafford, J. High bandwidth energy storage devices for HEV/EV energy storage system. In Proceedings of the IEEE Transportation Electrification Conference and Expo (ITEC), Dearborn, MI, USA, 15–18 June 2014. [Google Scholar]
- Shahverdi, M.; Mazzola, M.S.; Grice, Q.; Doude, M. Bandwidth-Based Control Strategy for a Series HEV with Light Energy Storage System. IEEE Trans. Veh. Technol. 2017, 66, 1040–1052. [Google Scholar] [CrossRef]
- Zheng, Z.; Sun, J.; Liu, D. Online State of Charge EKF Estimation for LiFePO4 Battery Management Systems. In Proceedings of the IEEE International Symposium on Intelligent Signal Processing and Communication Systems (ISPACS), Tamsui, New Tapei City, Taiwan, 4–7 November 2012. [Google Scholar]
- He, Z.; Gao, M.; Wang, C.; Wang, L.; Liu, Y. Adaptative State of Charge Estimation for Li-Ion Batteries Based on an Unscented Kalman Filter with an Enhanced Battery Model. Energies 2013, 6, 4134–4151. [Google Scholar] [CrossRef]
- He, W.; Williard, N.; Chen, C.; Pecht, M. State of charge estimation for electric vehicles batteries using unscented kalman filtering. Microeletr. Reliab. 2013, 53, 840–847. [Google Scholar] [CrossRef]
- Sun, F.; Hu, X.; Zou, Y.; Li, S. Adaptive unscented Kalman filtering for state of charge estimation of a lithium-ion battery for electric vehicles. Energy 2011, 36, 3531–3540. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Power-Train Components | Name | Characteristics |
|---|---|---|
| Energy Storage System (ESS) | Lithium iron phosphate (LFP) prismatic cells from A123 | Capacity = 39.2 Ah; nominal voltage = 340 V; nominal energy = 13.3 kWh; configuration: 7 × 15s2p. |
| Internal Combustion Engine (ICE) | Model MPE850 from Weber | 41 kW, 2 cylinders, 850 cc. |
| Electric Generator | Model YASA-400 | 93 kW, axial flux permanent magnet. |
| Electric Motors Unit | Model GVK210-100L6 from Linamar | 2 × 80 kW, unit ratio = 8.49. |
| Vehicle dynamics | 2015 Subaru BRZ Limited | Drag coefficient = 0.28; frontal area = 1.9695 m2; PHEV mass = 1300 kg; wheel radius = 0.3 m. |
| Parameter | UDDS | HWFET |
|---|---|---|
| 0.0873 Ω | 0.0865 Ω | |
| 0.0014 Ω | 0.0026 Ω | |
| 0.4187 kF | 0.2467 kF | |
| 0.2743 Ω | 0.2621 Ω | |
| 0.410 kF | 2.065 kF |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sockeel, N.; Ball, J.; Shahverdi, M.; Mazzola, M. Passive Tracking of the Electrochemical Impedance of a Hybrid Electric Vehicle Battery and State of Charge Estimation through an Extended and Unscented Kalman Filter. Batteries 2018, 4, 52. https://doi.org/10.3390/batteries4040052
Sockeel N, Ball J, Shahverdi M, Mazzola M. Passive Tracking of the Electrochemical Impedance of a Hybrid Electric Vehicle Battery and State of Charge Estimation through an Extended and Unscented Kalman Filter. Batteries. 2018; 4(4):52. https://doi.org/10.3390/batteries4040052
Chicago/Turabian StyleSockeel, Nicolas, John Ball, Masood Shahverdi, and Michael Mazzola. 2018. "Passive Tracking of the Electrochemical Impedance of a Hybrid Electric Vehicle Battery and State of Charge Estimation through an Extended and Unscented Kalman Filter" Batteries 4, no. 4: 52. https://doi.org/10.3390/batteries4040052