
Multi-View Gait Analysis by Temporal Geometric Features of Human Body Parts

 , ,
, ,
Abstract
:
1. Introduction
1.1. Gait Analysis
1.2. Gait Recognition
1.3. Vision-Based Human Pose Estimation
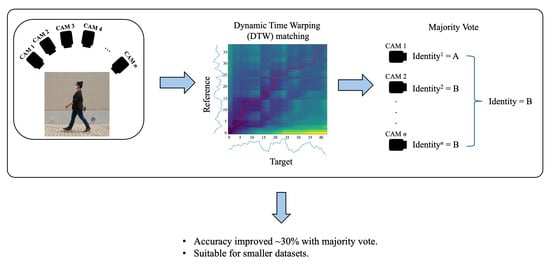
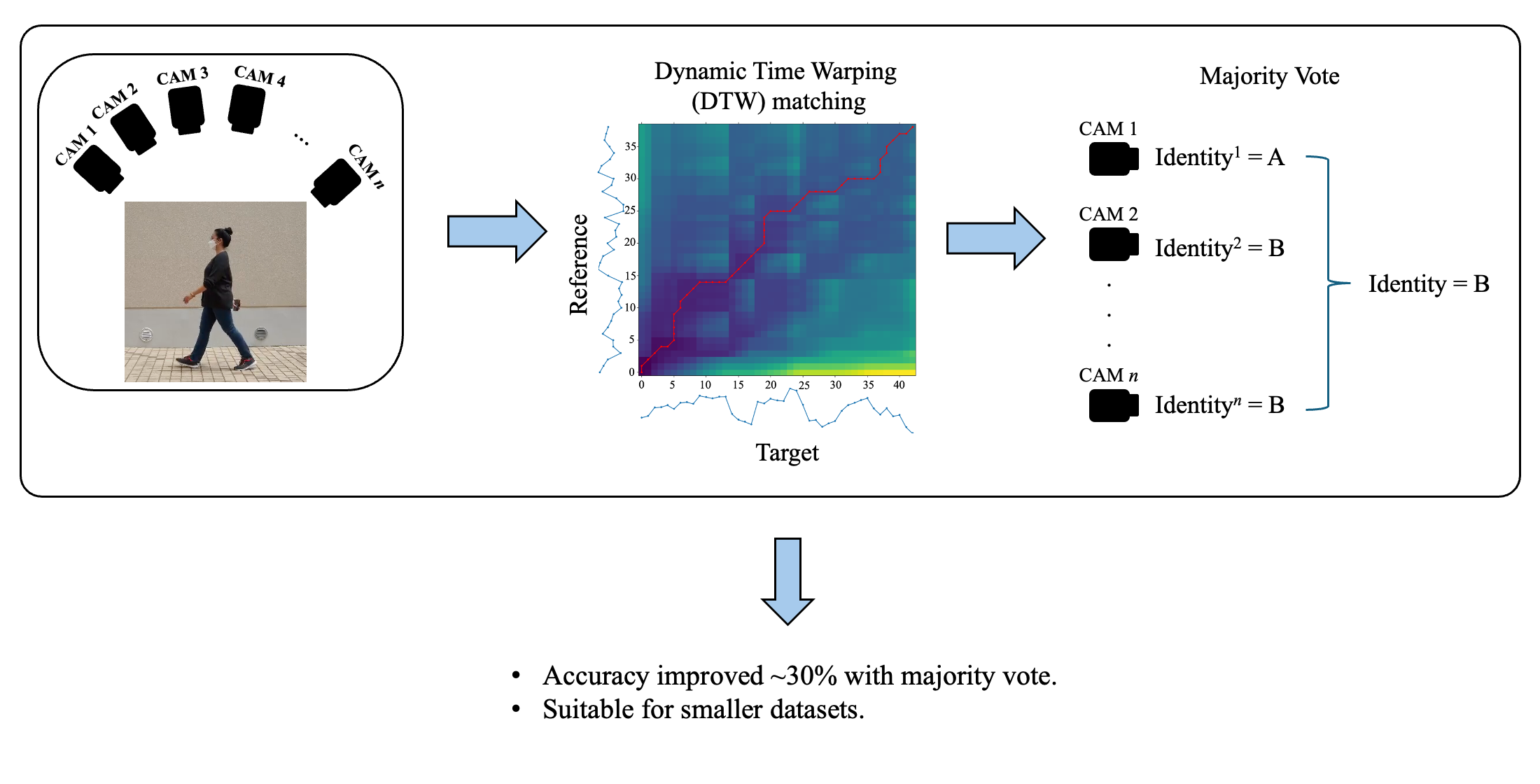
- We implement Dynamic Time Warping (DTW) to match the walking patterns.
- We deploy the joint angles and the rank correlation between each angle in parallel as features for measuring the DTW distance.
- A majority vote is applied to increase the matching performance over multiple cameras.
- Small datasets can be employed by the proposed method, which is a non-training-based approach.
- Detailed analyses are possible due to the availability of data visualization.
- The proposed method is implemented on the CPU, which has advantages in terms of time and cost savings.
2. Materials and Methods
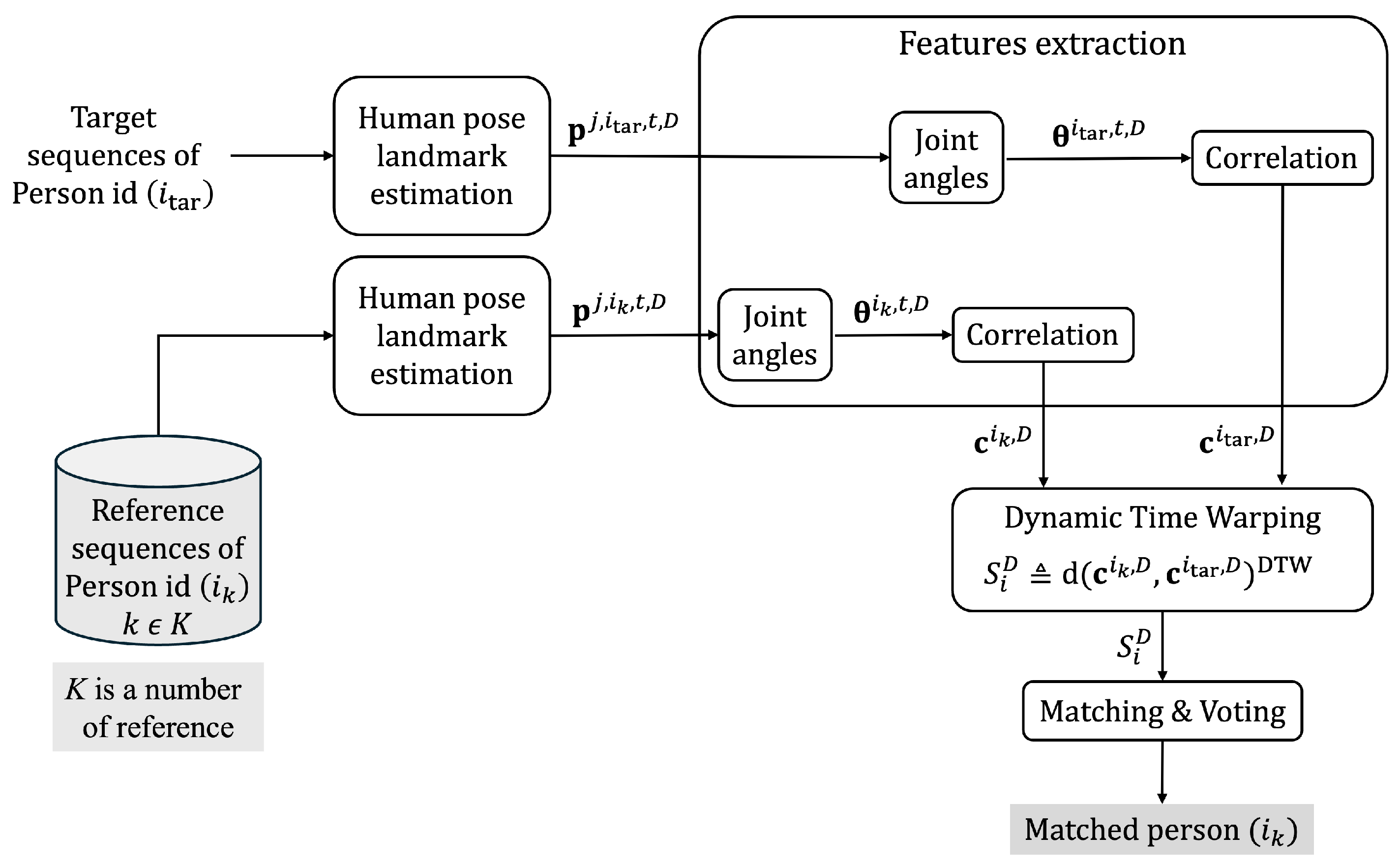
2.1. Methodology
2.2. Joint Angles Calculation
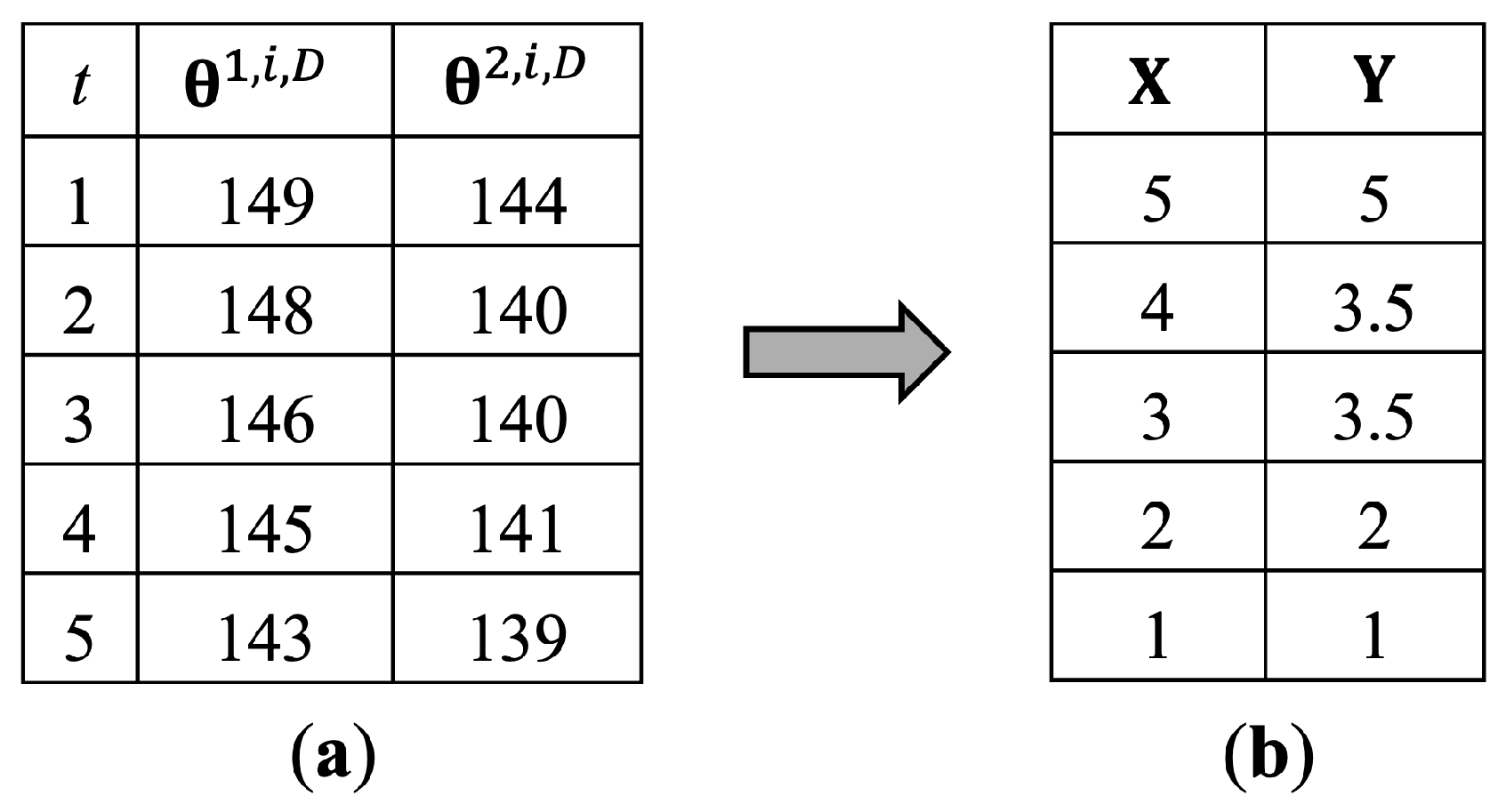
2.3. Correlation Calculation
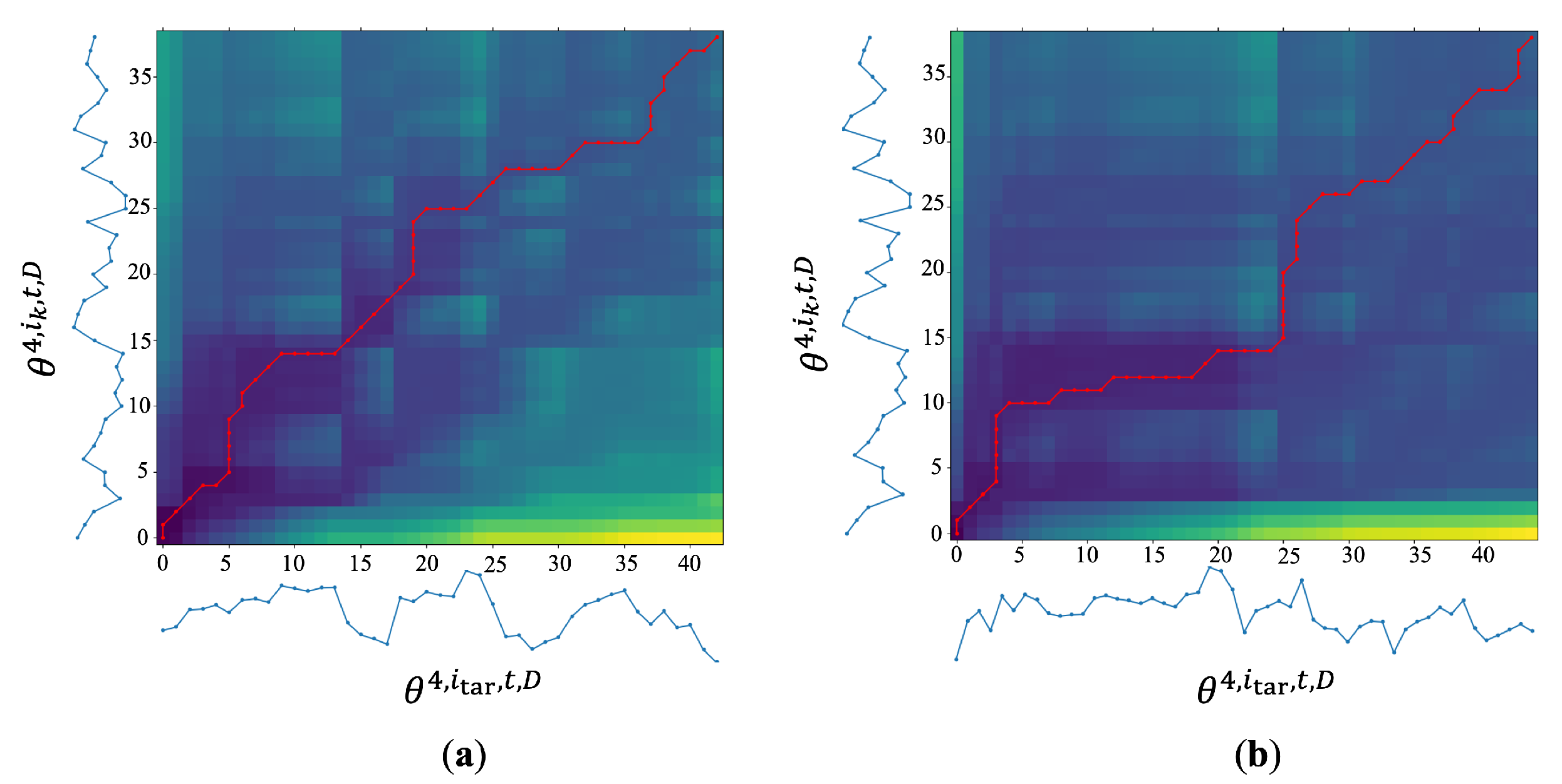
2.4. Distance Measurement
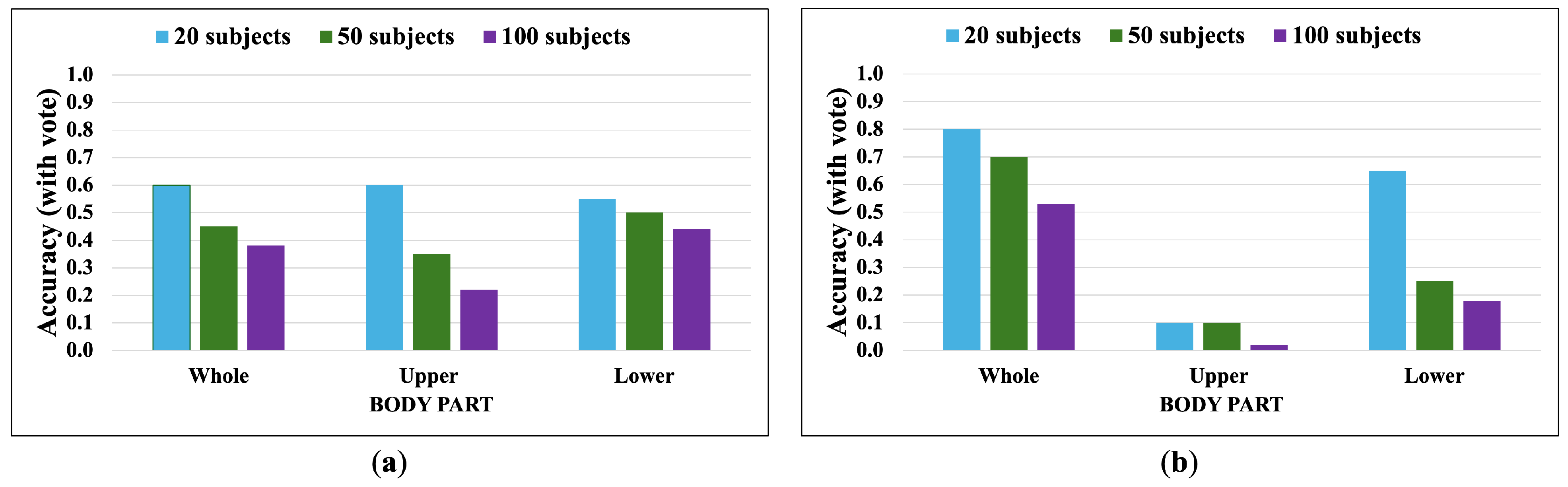
2.5. Matching Algorithm and Voting
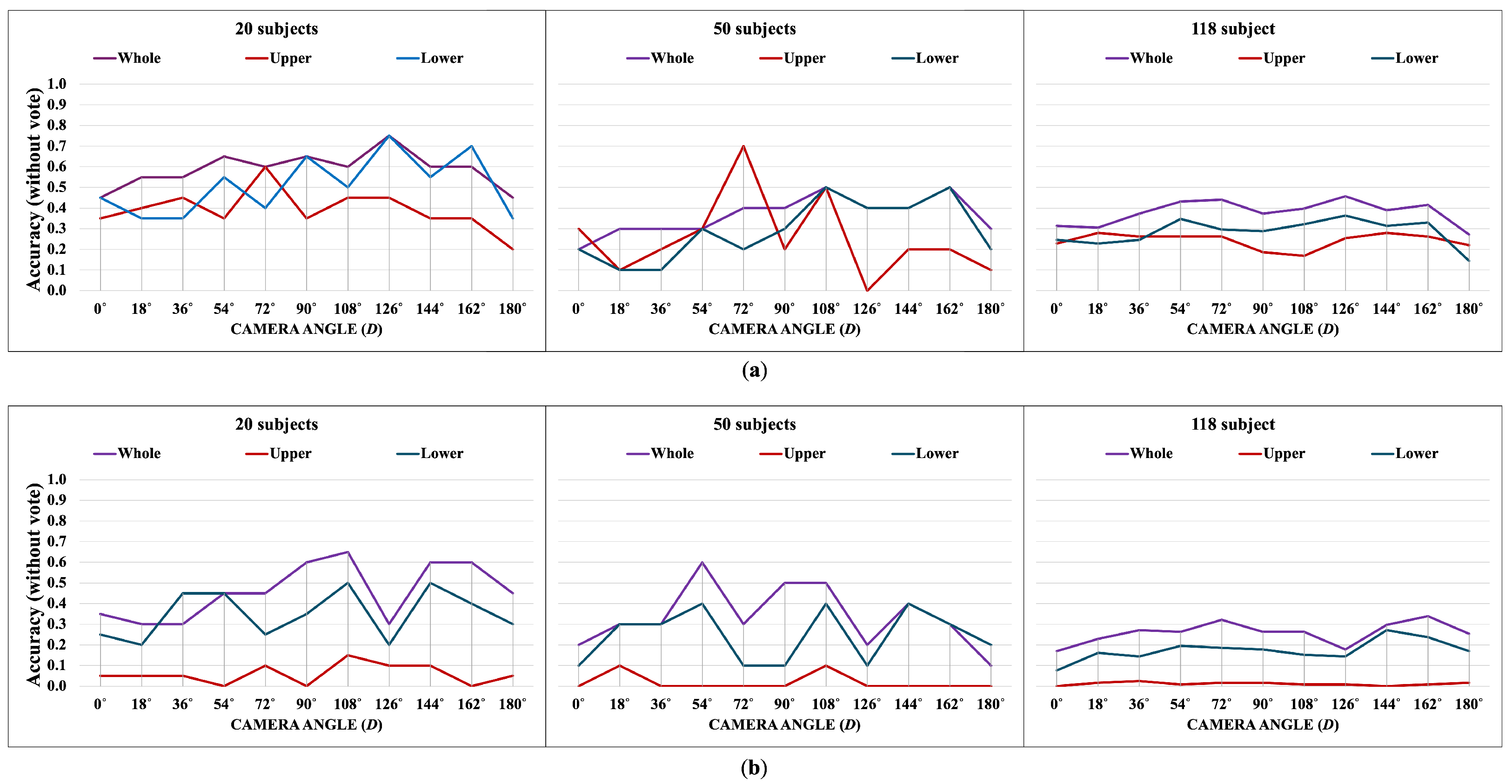
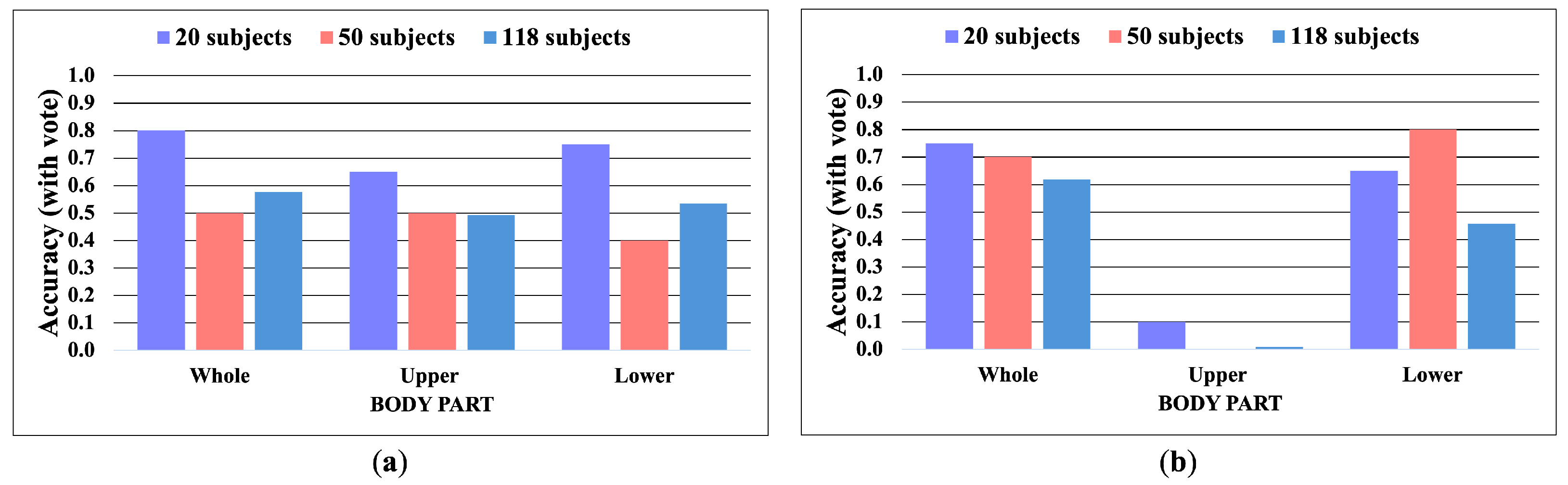
3. Results
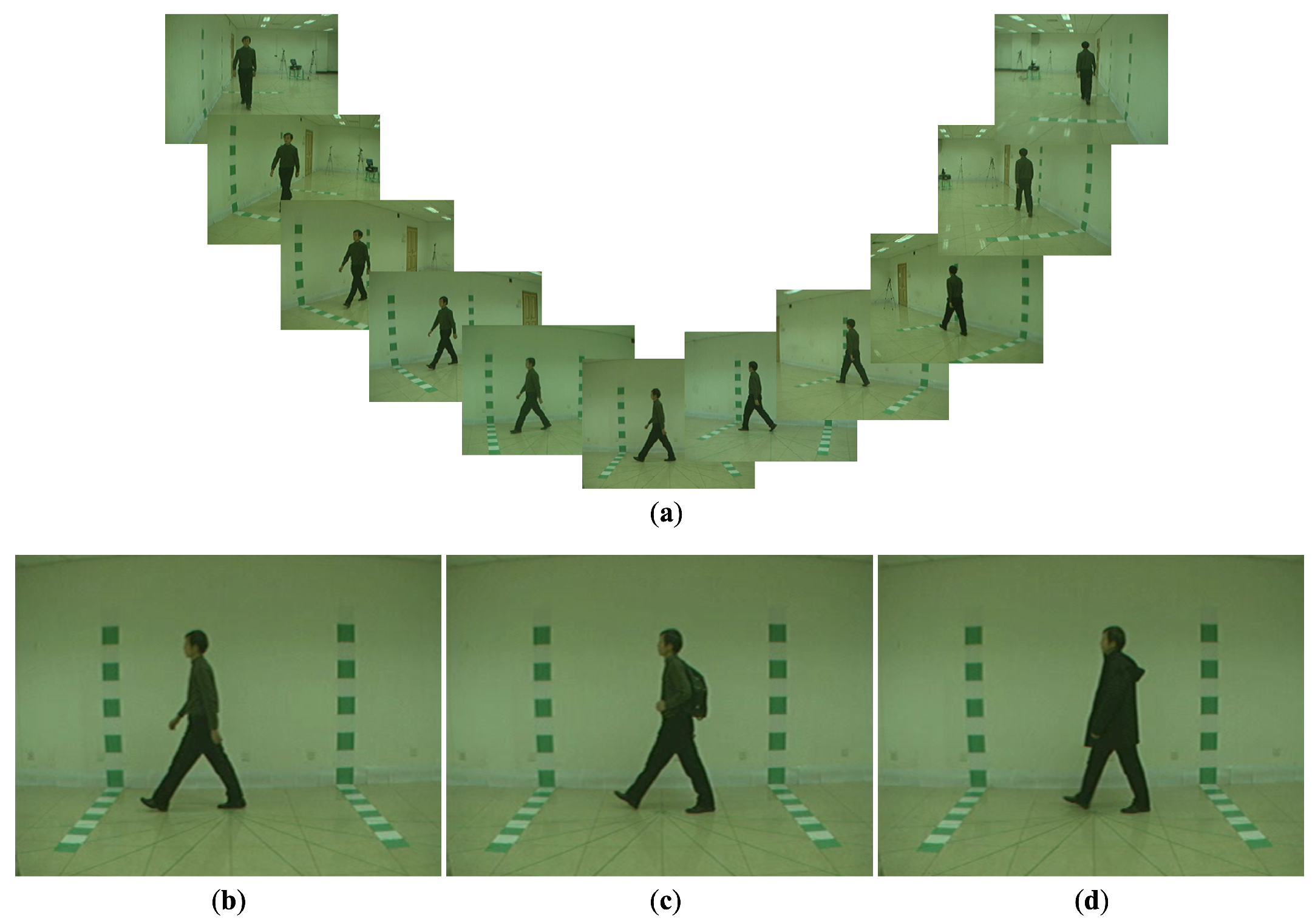
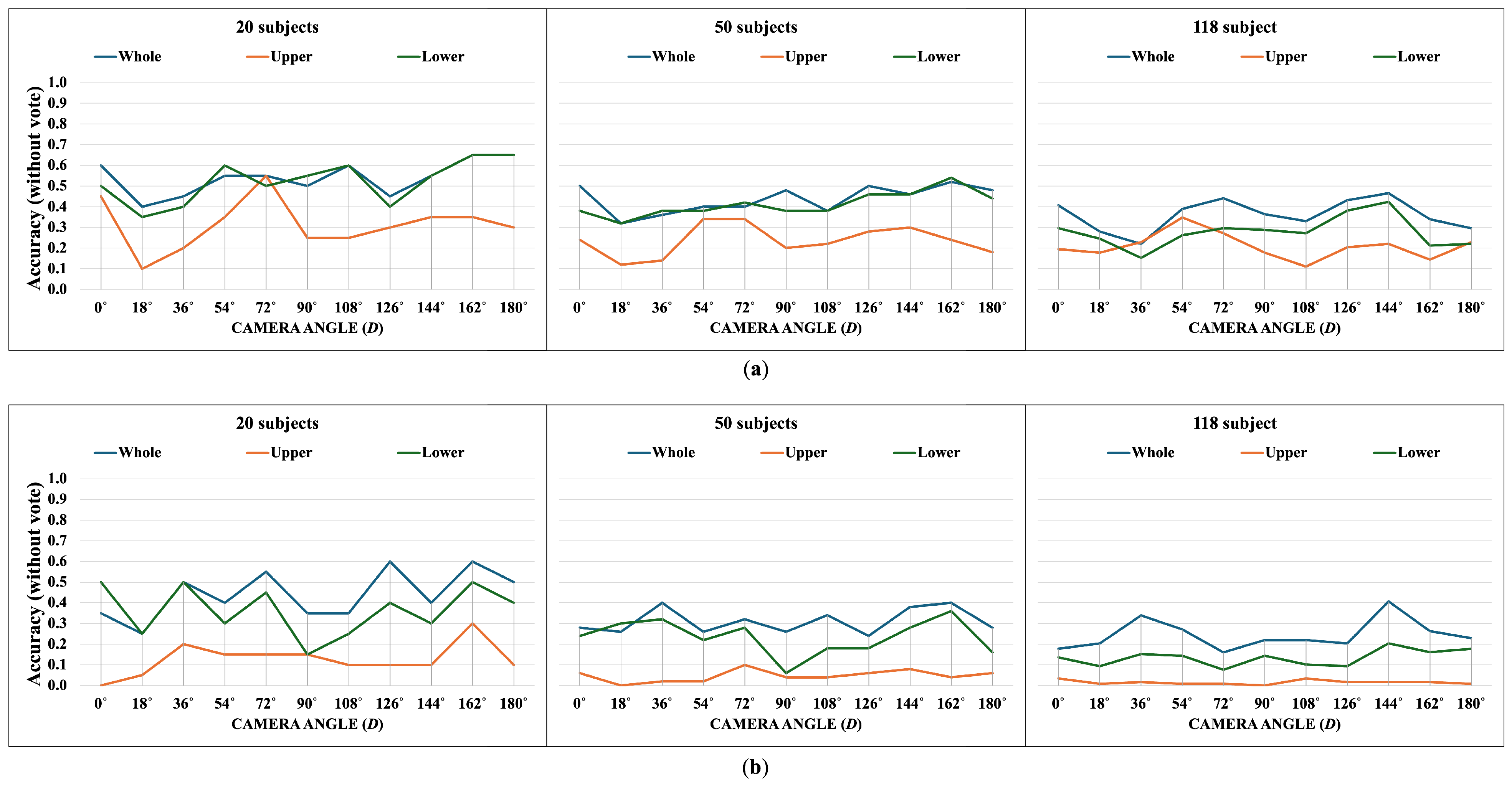
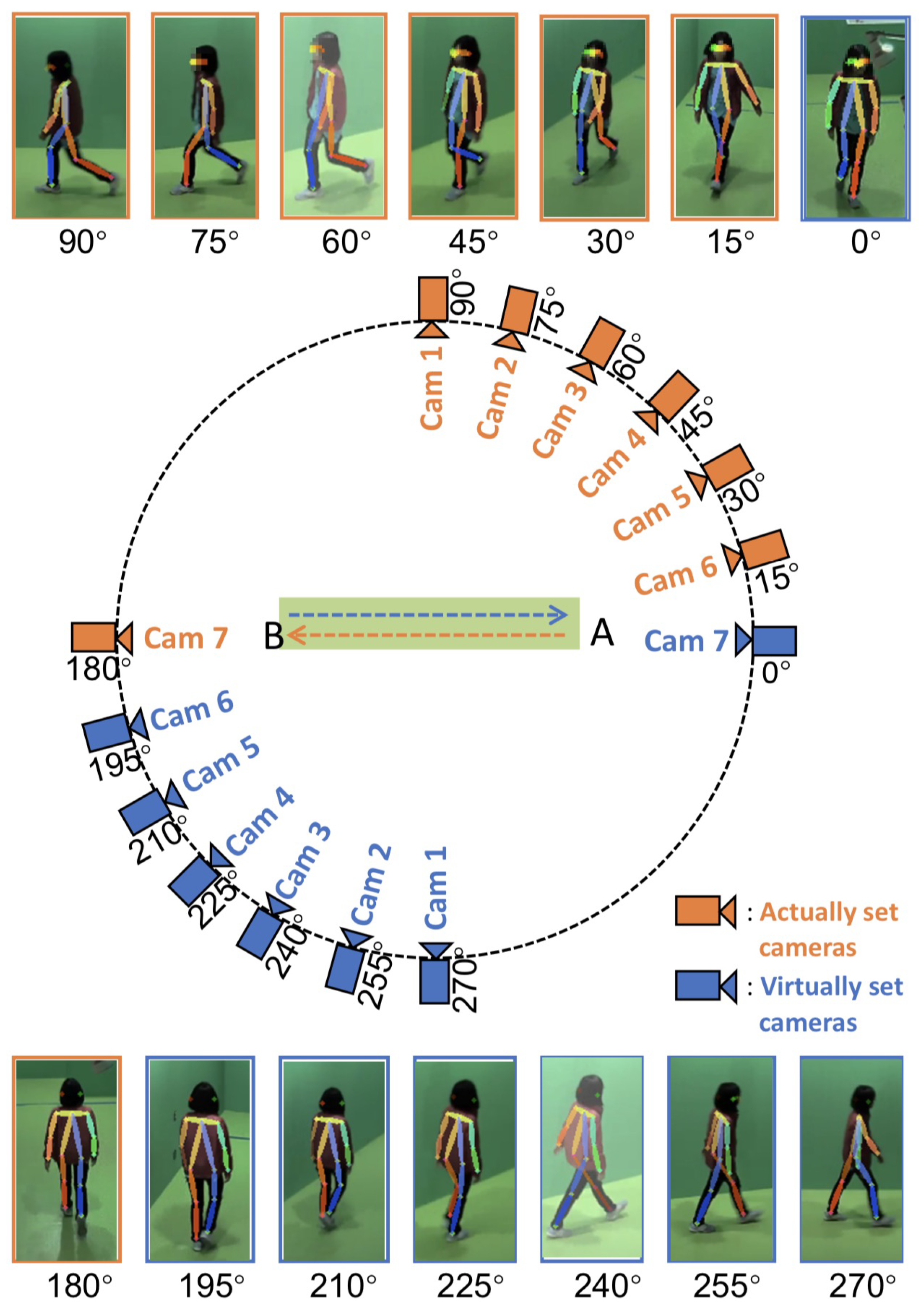
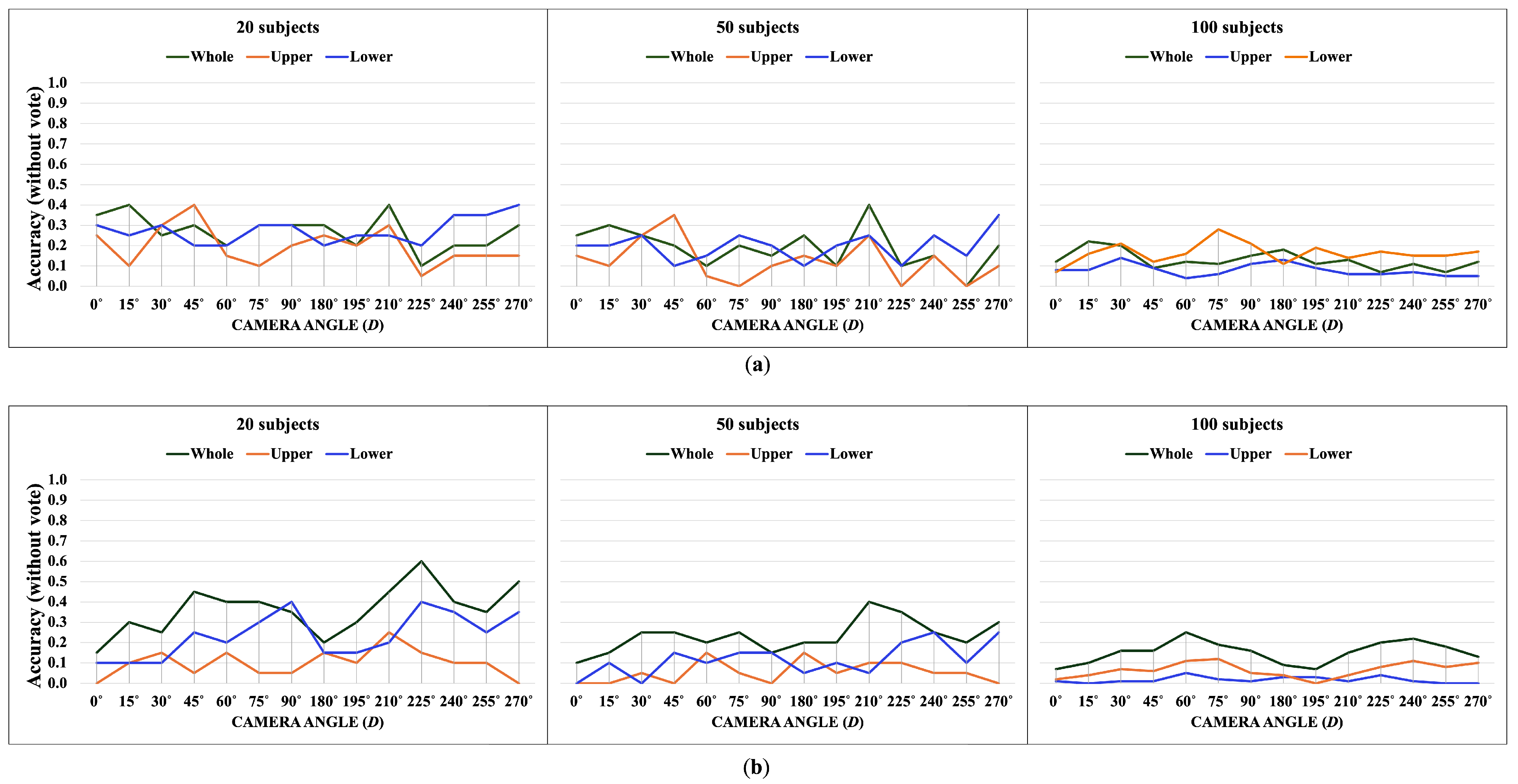
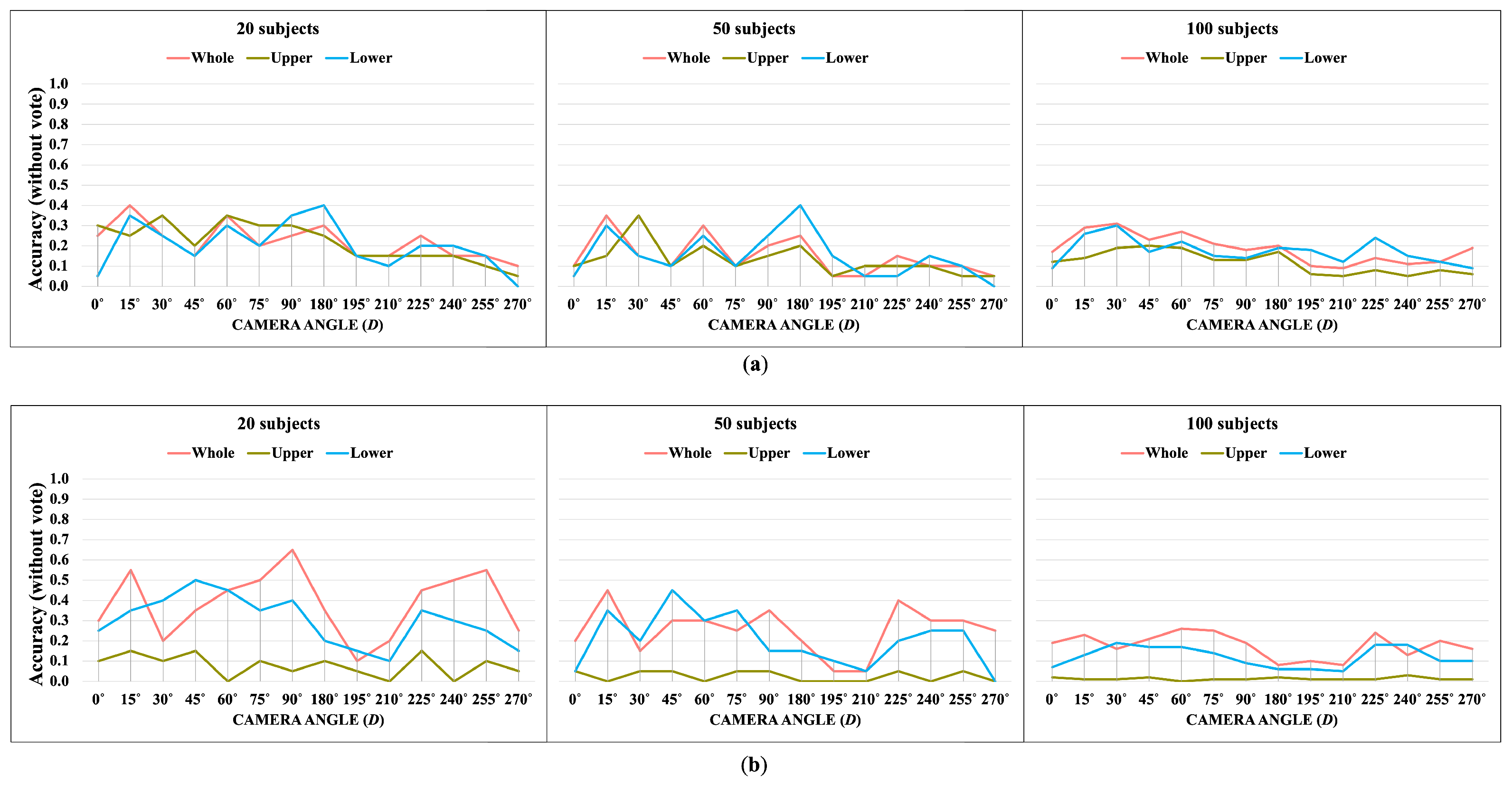
3.1. CASIA-B Datset
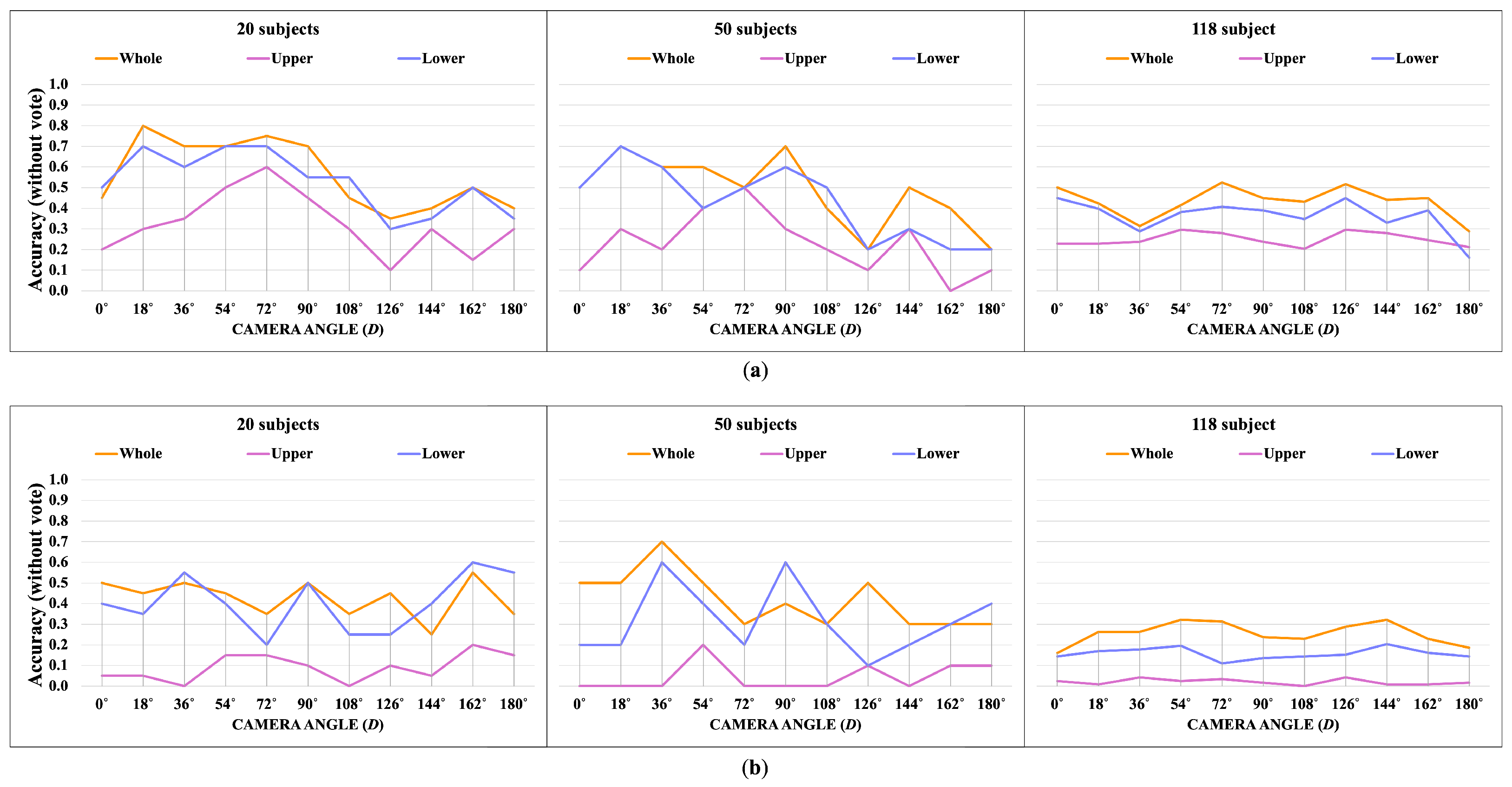
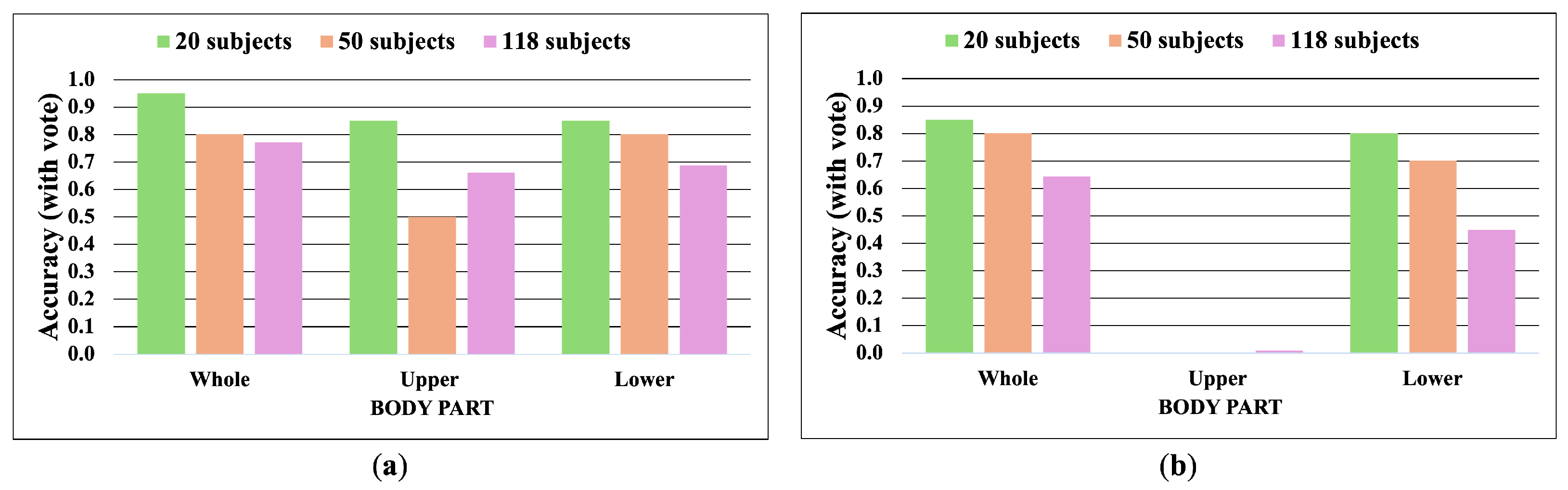
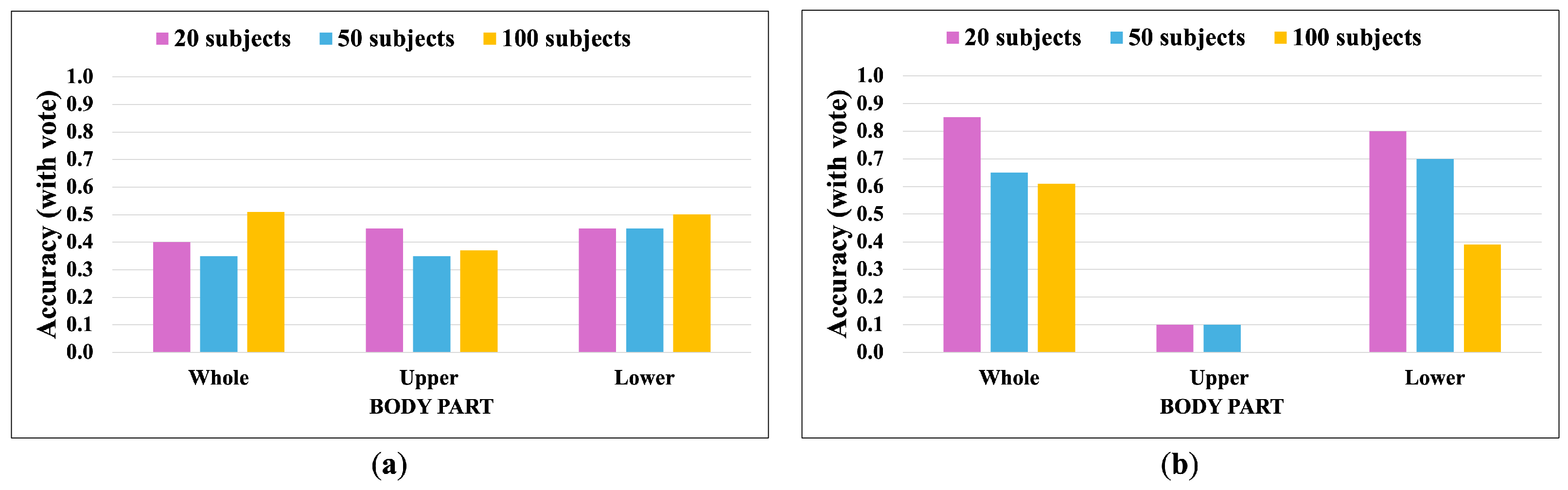
3.2. OUMVLP-Pose Dataset
3.3. Execution Time
3.4. Comparative Results with Previous Studies
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Multi-Scale Features | Rank-1 Accuracy | ||
|---|---|---|---|
| Frame-Level | Short-Term | Long-Term | NM |
| √ | 96.9 | ||
| √ | 97.2 | ||
| √ | 95.9 | ||
| √ | √ | 97.0 | |
| √ | √ | 97.4 | |
| √ | √ | 97.4 | |
| √ | √ | √ | 97.8 |
| Features | Recognition Rates |
|---|---|
| 60.92 | |
| 46.97 | |
| 42.40 | |
| 48.95 | |
| 63.78 |
References
- Bazarevsky, V.; Grishchenko, I.; Raveendran, K.; Zhu, T.; Zhang, F.; Grundmann, M. Blazepose: On-device real-time body pose tracking. arXiv 2020, arXiv:2006.10204. [Google Scholar]
- Singh, J.P.; Jain, S.; Arora, S.; Singh, U.P. Vision-based gait recognition: A survey. IEEE Access 2018, 6, 70497–70527. [Google Scholar] [CrossRef]
- Hundza, S.R.; Hook, W.R.; Harris, C.R.; Mahajan, S.V.; Leslie, P.A.; Spani, C.A.; Spalteholz, L.G.; Birch, B.J.; Commandeur, D.T.; Livingston, N.J. Accurate and Reliable Gait Cycle Detection in Parkinson’s Disease. IEEE Trans. Neural Syst. Rehabil. Eng. 2014, 22, 127–137. [Google Scholar] [CrossRef]
- Rocha, A.P.; Choupina, H.; Fernandes, J.M.; Rosas, M.J.; Vaz, R.; Cunha, J.P.S. Parkinson’s disease assessment based on gait analysis using an innovative RGB-D camera system. In Proceedings of the 2014 36th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Chicago, IL, USA, 26–30 August 2014; pp. 3126–3129. [Google Scholar] [CrossRef]
- Sun, G.; Wang, Z. Fall detection algorithm for the elderly based on human posture estimation. In Proceedings of the 2020 Asia-Pacific Conference on Image Processing, Electronics and Computers (IPEC), Dalian, China, 14–16 April 2020; pp. 172–176. [Google Scholar] [CrossRef]
- Slijepcevic, D.; Zeppelzauer, M.; Unglaube, F.; Kranzl, A.; Breiteneder, C.; Horsak, B. Explainable Machine Learning in Human Gait Analysis: A Study on Children With Cerebral Palsy. IEEE Access 2023, 11, 65906–65923. [Google Scholar] [CrossRef]
- Xu, S.; Fang, J.; Hu, X.; Ngai, E.; Wang, W.; Guo, Y.; Leung, V.C.M. Emotion Recognition From Gait Analyses: Current Research and Future Directions. IEEE Trans. Comput. Soc. Syst. 2022, 11, 363–377. [Google Scholar] [CrossRef]
- Kang, G.E.; Mickey, B.; Krembs, B.; McInnis, M.; Gross, M. The Effect of Mood Phases on Balance Control in Bipolar Disorder. J. Biomech. 2018, 82, 266–270. [Google Scholar] [CrossRef]
- Jianwattanapaisarn, N.; Sumi, K.; Utsumi, A.; Khamsemanan, N.; Nattee, C. Emotional characteristic analysis of human gait while real-time movie viewing. Front. Artif. Intell. 2022, 5, 989860. [Google Scholar] [CrossRef]
- Hughes, R.; Muheidat, F.; Lee, M.; Tawalbeh, L.A. Floor Based Sensors Walk Identification System Using Dynamic Time Warping with Cloudlet Support. In Proceedings of the 2019 IEEE 13th International Conference on Semantic Computing (ICSC), Floor Based Sensors Walk Identification System Using Dynamic Time Warping with Cloudlet Support, Newport Beach, CA, USA, 30 January–1 February 2019; pp. 440–444. [Google Scholar] [CrossRef]
- Błażkiewicz, M.; Lann Vel Lace, K.; Hadamus, A. Gait Symmetry Analysis Based on Dynamic Time Warping. Symmetry 2021, 13, 836. [Google Scholar] [CrossRef]
- Ge, Y.; Li, W.; Farooq, M.; Qayyum, A.; Wang, J.; Chen, Z.; Cooper, J.; Imran, M.A.; Abbasi, Q.H. LoGait: LoRa Sensing System of Human Gait Recognition Using Dynamic Time Warping. IEEE Sens. J. 2023, 23, 21687–21697. [Google Scholar] [CrossRef]
- Avola, D.; Cinque, L.; De Marsico, M.; Fagioli, A.; Foresti, G.L.; Mancini, M.; Mecca, A. Signal enhancement and efficient DTW-based comparison for wearable gait recognition. Comput. Secur. 2024, 137, 103643. [Google Scholar] [CrossRef]
- Alotaibi, M.; Mahmood, A. Improved gait recognition based on specialized deep convolutional neural network. Comput. Vis. Image Underst. 2017, 164, 103–110. [Google Scholar] [CrossRef]
- Deng, M.; Wang, C. Gait recognition under different clothing conditions via deterministic learning. IEEE/CAA J. Autom. Sin.
- Hou, S.; Cao, C.; Liu, X.; Huang, Y. Gait lateral network: Learning discriminative and compact representations for gait recognition. In Proceedings of the European Conference on Computer Vision, Glasgow, UK, 23–28 August 2020; pp. 382–398. [Google Scholar]
- Fan, C.; Peng, Y.; Cao, C.; Liu, X.; Hou, S.; Chi, J.; Huang, Y.; Li, Q.; He, Z. GaitPart: Temporal Part-Based Model for Gait Recognition. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 14–19 June 2020; pp. 14213–14221. [Google Scholar] [CrossRef]
- Liang, J.; Fan, C.; Hou, S.; Shen, C.; Huang, Y.; Yu, S. GaitEdge: Beyond Plain End-to-End Gait Recognition for Better Practicality. In Proceedings of the Computer Vision—ECCV 2022, Tel Aviv, Israel, 23–27 October 2022. [Google Scholar]
- Liao, R.; Yu, S.; An, W.; Huang, Y. A model-based gait recognition method with body pose and human prior knowledge. Pattern Recognit. 2020, 98, 107069. [Google Scholar] [CrossRef]
- Liao, R.; Li, Z.; Bhattacharyya, S.S.; York, G. PoseMapGait: A model-based gait recognition method with pose estimation maps and graph convolutional networks. Neurocomputing 2022, 501, 514–528. [Google Scholar] [CrossRef]
- Li, X.; Makihara, Y.; Xu, C.; Yagi, Y. Multi-view large population gait database with human meshes and its performance evaluation. IEEE Trans. Biom. Behav. Identity Sci. 2022, 4, 234–248. [Google Scholar] [CrossRef]
- Xu, C.; Makihara, Y.; Li, X.; Yagi, Y. Occlusion-aware human mesh model-based gait recognition. IEEE Trans. Inf. Forensics Secur. 2023, 18, 1309–1321. [Google Scholar] [CrossRef]
- Han, K.; Li, X. Research Method of Discontinuous-Gait Image Recognition Based on Human Skeleton Keypoint Extraction. Sensors 2023, 23, 7274. [Google Scholar] [CrossRef] [PubMed]
- Cao, Z.; Hidalgo, G.; Simon, T.; Wei, S.-E.; Sheikh, Y. OpenPose: Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields. arXiv 2019, arXiv:1812.08008. [Google Scholar] [CrossRef] [PubMed]
- Fang, H.S.; Xie, S.; Tai, Y.W.; Lu, C. RMPE: Regional Multi-person Pose Estimation. In Proceedings of the ICCV, Venice, Italy, 22–29 October 2017. [Google Scholar]
- Li, X.; Zhang, M.; Gu, J.; Zhang, Z. Fitness Action Counting Based on MediaPipe. In Proceedings of the 2022 15th International Congress on Image and Signal Processing, BioMedical Engineering and Informatics (CISP-BMEI), Beijing, China, 5–7 November 2022; pp. 1–7. [Google Scholar] [CrossRef]
- Chen, K.Y.; Shin, J.; Hasan, M.A.M.; Liaw, J.J.; Yuichi, O.; Tomioka, Y. Fitness Movement Types and Completeness Detection Using a Transfer-Learning-Based Deep Neural Network. Sensors 2022, 22, 5700. [Google Scholar] [CrossRef] [PubMed]
- Spearman, C. The Proof and Measurement of Association between Two Things. Am. J. Psychol. 1987, 100, 441–471. [Google Scholar] [CrossRef]
- Myers, C.S.; Rabiner, L.R. A comparative study of several dynamic time-warping algorithms for connected-word recognition. Bell Syst. Tech. J. 1981, 60, 1389–1409. [Google Scholar] [CrossRef]
- Shokoohi-Yekta, M.; Hu, B.; Jin, H.; Wang, J.; Keogh, E. Generalizing DTW to the multi-dimensional case requires an adaptive approach. Data Min. Knowl. Discov. 2017, 31, 1–31. [Google Scholar] [CrossRef] [PubMed]
- Gujarati, D. Essentials of Econometrics; SAGE Publications: Thousand Oaks, CA, USA, 2021. [Google Scholar]
- Yu, S.; Tan, D.; Tan, T. A Framework for Evaluating the Effect of View Angle, Clothing and Carrying Condition on Gait Recognition. In Proceedings of the 18th International Conference on Pattern Recognition (ICPR’06), Hong Kong, China, 20–24 August 2006; Volume 4, pp. 441–444. [Google Scholar] [CrossRef]
- An, W.; Yu, S.; Makihara, Y.; Wu, X.; Xu, C.; Yu, Y.; Liao, R.; Yagi, Y. Performance Evaluation of Model-Based Gait on Multi-View Very Large Population Database With Pose Sequences. IEEE Trans. Biom. Behav. Identity Sci. 2020, 2, 421–430. [Google Scholar] [CrossRef]
- Huang, X.; Zhu, D.; Wang, H.; Wang, X.; Yang, B.; He, B.; Liu, W.; Feng, B. Context-Sensitive Temporal Feature Learning for Gait Recognition. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, BC, Canada, 11–17 October 2021; pp. 12909–12918. [Google Scholar]

















| LElbow | RElbow | LHip | RHip | LKnee | RKnee | LAnkle (Front) | RAnkle (Front) | LAnkle (Back) | RAnkle (Back) | |
|---|---|---|---|---|---|---|---|---|---|---|
| LElbow | 1.00 | 0.43 | −0.47 | −0.32 | −0.65 | −0.30 | −0.31 | −0.01 | 0.10 | 0.03 |
| RElbow | 0.43 | 1.00 | −0.37 | 0.06 | −0.19 | 0.17 | −0.34 | −0.46 | 0.24 | 0.54 |
| LHip | −0.47 | −0.37 | 1.00 | 0.06 | 0.58 | 0.28 | 0.07 | −0.08 | −0.23 | −0.30 |
| RHip | −0.32 | 0.06 | 0.06 | 1.00 | 0.33 | 0.86 | −0.33 | −0.54 | 0.04 | 0.45 |
| LKnee | −0.65 | −0.19 | 0.58 | 0.33 | 1.00 | 0.47 | 0.30 | −0.34 | −0.52 | 0.08 |
| RKnee | −0.30 | 0.17 | 0.28 | 0.86 | 0.47 | 1.00 | −0.43 | −0.61 | −0.13 | 0.41 |
| LAnkle (Front) | −0.31 | −0.34 | 0.07 | −0.33 | 0.30 | −0.43 | 1.00 | 0.23 | −0.31 | 0.00 |
| RAnkle (Front) | −0.01 | −0.46 | −0.08 | −0.54 | −0.34 | −0.61 | 0.23 | 1.00 | 0.13 | −0.57 |
| LAnkle (Back) | 0.10 | 0.24 | −0.23 | 0.04 | −0.52 | −0.13 | −0.31 | 0.13 | 1.00 | 0.17 |
| RAnkle (Back) | 0.03 | 0.54 | −0.30 | 0.45 | 0.08 | 0.41 | 0.00 | −0.57 | 0.17 | 1.00 |
| Joint Angles Calculation | DTW (Joint Angles) | DTW (Correaltion) |
|---|---|---|
| 3.22 ms | 182 ms | 102 ms |
| Accuracy with a Majority Vote (%) | ||||
|---|---|---|---|---|
| 20 Subjects | 50 Subjects | 118 Subjects | ||
| Joint angles | Whole | 80.00 | 80.00 | 68.64 |
| Upper | 55.00 | 52.00 | 50.00 | |
| Lower | 75.00 | 74.00 | 55.93 | |
| Correlation | Whole | 85.00 | 78.00 | 65.25 |
| Upper | 10.00 | 8.00 | 2.45 | |
| Lower | 80.00 | 62.00 | 39.83 | |
| 20 Subjects | |
|---|---|
| Include identical view | 62.83 |
| Exclude identical view | 59.14 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pattanapisont, T.; Kotani, K.; Siritanawan, P.; Kondo, T.; Karnjana, J. Multi-View Gait Analysis by Temporal Geometric Features of Human Body Parts. J. Imaging 2024, 10, 88. https://doi.org/10.3390/jimaging10040088
Pattanapisont T, Kotani K, Siritanawan P, Kondo T, Karnjana J. Multi-View Gait Analysis by Temporal Geometric Features of Human Body Parts. Journal of Imaging. 2024; 10(4):88. https://doi.org/10.3390/jimaging10040088
Chicago/Turabian StylePattanapisont, Thanyamon, Kazunori Kotani, Prarinya Siritanawan, Toshiaki Kondo, and Jessada Karnjana. 2024. "Multi-View Gait Analysis by Temporal Geometric Features of Human Body Parts" Journal of Imaging 10, no. 4: 88. https://doi.org/10.3390/jimaging10040088