

Bioinspired and Multifunctional Tribological Materials for Sliding, Erosive, Machining, and Energy-Absorbing Conditions: A Review

 ,
,  ,
,  , ,
, ,  and
and
Abstract
:
1. Introduction
2. Design and Fabrication Strategies for Bioinspired Tribological Surfaces
3. Bioinspired Surfaces for Sliding Contacts
4. Bioinspired Surface Texturing of Biomaterials
5. Bioinspired Surfaces for Erosive Wear Resistance
6. Bioinspired Structures for Impact or Energy Absorption
7. Bioinspired Design of Tools for Cutting or Machining
8. Other Tribological Applications
8.1. Biomedical
8.2. Soft Robotics
8.3. Space
8.4. Renewable Energy

8.5. Bioinspired Metamaterials
9. Challenges and Future Prospects in Bioinspired Tribology
10. Summary
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Tzanakis, I.; Hadfield, M.; Thomas, B.; Noya, S.; Henshaw, I.; Austen, S. Future perspectives on sustainable tribology. Renew. Sustain. Energy Rev. 2012, 16, 4126–4140. [Google Scholar] [CrossRef]
- Woydt, M. The importance of tribology for reducing CO2 emissions and for sustainability. Wear 2021, 474–475, 203768. [Google Scholar] [CrossRef]
- Holmberg, K.; Erdemir, A. Influence of tribology on global energy consumption, costs and emissions. Friction 2017, 5, 263–284. [Google Scholar] [CrossRef]
- Meng, Y.; Xu, J.; Jin, Z.; Prakash, B.; Hu, Y. A review of recent advances in tribology. Friction 2020, 8, 221–300. [Google Scholar] [CrossRef]
- Kumar, R.; Kariminejad, A.; Antonov, M.; Goljandin, D.; Klimczyk, P.; Hussainova, I. Progress in Sustainable Recycling and Circular Economy of Tungsten Carbide Hard Metal Scraps for Industry 5.0 and Onwards. Sustainability 2023, 15, 12249. [Google Scholar] [CrossRef]
- Allibone, T.E.; Meek, J.M. Relation between friction and adhesion. Proc. R. Soc. London Ser. A Math. Phys. Sci. 1950, 202, 244–253. [Google Scholar] [CrossRef]
- Kumar, R.; Liu, L.; Antonov, M.; Ivanov, R.; Hussainova, I. Hot Sliding Wear of 88 wt.% TiB–Ti Composite from SHS Produced Powders. Materials 2021, 14, 1242. [Google Scholar] [CrossRef] [PubMed]
- Kumar, R.; Hussainova, I.; Rahmani, R.; Antonov, M. Solid Lubrication at High-Temperatures—A Review. Materials 2022, 15, 1695. [Google Scholar] [CrossRef] [PubMed]
- Kumar, R.; Antonov, M.; Klimczyk, P.; Mikli, V.; Gomon, D. Effect of cBN content and additives on sliding and surface fatigue wear of spark plasma sintered Al2O3-cBN composites. Wear 2022, 494–495, 204250. [Google Scholar] [CrossRef]
- Wood, R.J.K. Multifunctional Materials for Tribological Applications. p. 379. Available online: https://books.google.com/books/about/Multifunctional_Materials_for_Tribologic.html?id=qZm9BwAAQBAJ (accessed on 30 September 2023).
- Ibrahim, M.Z.; Sarhan, A.A.; Yusuf, F.; Hamdi, M. Biomedical materials and techniques to improve the tribological, mechanical and biomedical properties of orthopedic implants—A review article. J. Alloys Compd. 2017, 714, 636–667. [Google Scholar] [CrossRef]
- Xu, Y.; Liu, W.; Zhang, G.; Li, Z.; Hu, H.; Wang, C.; Zeng, X.; Zhao, S.; Zhang, Y.; Ren, T. Friction stability and cellular behaviors on laser textured Ti–6Al–4V alloy implants with bioinspired micro-overlapping structures. J. Mech. Behav. Biomed. Mater. 2020, 109, 103823. [Google Scholar] [CrossRef] [PubMed]
- Rezapourian, M.; Kamboj, N.; Jasiuk, I.; Hussainova, I. Biomimetic design of implants for long bone critical-sized defects. J. Mech. Behav. Biomed. Mater. 2022, 134, 105370. [Google Scholar] [CrossRef] [PubMed]
- Kamboj, N.; Kazantseva, J.; Rahmani, R.; Rodríguez, M.A.; Hussainova, I. Selective laser sintered bio-inspired silicon-wollastonite scaffolds for bone tissue engineering. Mater. Sci. Eng. C 2020, 116, 111223. [Google Scholar] [CrossRef]
- Zambrano-Mera, D.F.; Espinoza-González, R.; Rosenkranz, A.; Harvey, T.J.; Polcar, T.; Valenzuela, P.; Gacitúa, W. Enhanced erosion resistance of anti-reflective TiO2/SiO2 coatings induced by Zr-oxide doping. Sol. Energy Mater. Sol. Cells 2023, 250, 112079. [Google Scholar] [CrossRef]
- Wiesinger, F.; Sutter, F.; Fernández-García, A.; Reinhold, J.; Pitz-Paal, R. Sand erosion on solar reflectors: Accelerated simulation and comparison with field data. Sol. Energy Mater. Sol. Cells 2016, 145, 303–313. [Google Scholar] [CrossRef]
- Wang, X.; Xu, Q.; Wang, B.; Zhang, L.; Yang, H.; Peng, Z. Effect of surface waviness on the static performance of aerostatic journal bearings. Tribol. Int. 2016, 103, 394–405. [Google Scholar] [CrossRef]
- Chen, S. Hydrodynamic Behaviour of Gliding Hydrofoil Crafts. Ph.D. Thesis, University of London, London, UK, 2013. [Google Scholar]
- Li, M.S.; Melville, D.; Chung, E.; Stuart, H.S. Milliscale features increase friction of soft skin in lubricated contact. IEEE Robot. Autom. Lett. 2020, 5, 4781–4787. [Google Scholar] [CrossRef]
- Majidi, C.; Shepherd, R.F.; Kramer, R.K.; Whitesides, G.M.; Wood, R.J. Influence of surface traction on soft robot undulation. Int. J. Robot. Res. 2013, 32, 1577–1584. [Google Scholar] [CrossRef]
- Ben-Larbi, M.K.; Hensel, R.; Atzeni, G.; Arzt, E.; Stoll, E. Orbital debris removal using micropatterned dry adhesives: Review and recent advances. Prog. Aerosp. Sci. 2022, 134, 100850. [Google Scholar] [CrossRef]
- Williamsen, J.E. Vulnerability of Manned Spacecraft to Crew Loss from Orbital Debris Penetration; NASA Marshall Space Flight Center: Huntsville, AL, USA, 1994. [Google Scholar]
- Aïssa, B.; Tagziria, K.; Haddad, E.; Jamroz, W.; Loiseau, J.; Higgins, A.; Asgar-Khan, M.; Hoa, S.V.; Merle, P.G.; Therriault, D.; et al. The Self-Healing Capability of Carbon Fibre Composite Structures Subjected to Hypervelocity Impacts Simulating Orbital Space Debris. ISRN Nanomater. 2012, 2012, 16. [Google Scholar] [CrossRef]
- Kumar, R.; Antonov, M.; Holovenko, Y.; Surzenkov, A. Erosive Wear Resistance of Nature-inspired Flexible Materials. Tribol. Lett. 2020, 68, 1–8. [Google Scholar] [CrossRef]
- Koch, K.; Bhushan, B.; Barthlott, W. Multifunctional surface structures of plants: An inspiration for biomimetics. Prog. Mater. Sci. 2009, 54, 137–178. [Google Scholar] [CrossRef]
- Bhushan, B. Lessons from nature for green science and technology: An overview and bioinspired superliquiphobic/philic surfaces. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2019, 377, 20180274. [Google Scholar] [CrossRef] [PubMed]
- Nosonovsky, M.; Bhushan, B. Biologically Inspired Surfaces: Broadening the Scope of Roughness**. Adv. Funct. Mater. 2008, 18, 843–855. [Google Scholar] [CrossRef]
- Ibrahim, M.; Jiang, J.; Wen, Z.; Sun, X. Surface Engineering for Enhanced Triboelectric Nanogenerator. Nanoenergy Adv. 2021, 1, 58–80. [Google Scholar] [CrossRef]
- Liang, L.; Qing, Y. (Eds.) Advanced Coating Materials; Wiley: New York, NY, USA, 2018. [Google Scholar] [CrossRef]
- Ma, S.; Scaraggi, M.; Yan, C.; Wang, X.; Gorb, S.N.; Dini, D.; Zhou, F. Bioinspired 3D Printed Locomotion Devices Based on Anisotropic Friction. Small 2019, 15, e1802931. [Google Scholar] [CrossRef]
- Wu, Z.; Chen, Y.; Mukasa, D.; Pak, O.S.; Gao, W. Medical micro/nanorobots in complex media. Chem. Soc. Rev. 2020, 49, 8088–8112. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Zhang, Y.; Han, Y.; Gong, X. Micro/Nanorobots for Medical Diagnosis and Disease Treatment. Micromachines 2022, 13, 648. [Google Scholar] [CrossRef]
- Fukuda, T.; Kajima, H.; Hasegawa, Y. Intelligent robots as artificial living creatures. Artif. Life Robot. 2004, 8, 101–110. [Google Scholar] [CrossRef]
- Ge, J.Z.; Calderón, A.A.; Chang, L.; Pérez-Arancibia, N.O. An earthworm-inspired friction-controlled soft robot capable of bidirectional locomotion. Bioinspir. Biomim. 2019, 14, 036004. [Google Scholar] [CrossRef]
- Zhang, Z.; Wang, X.; Tong, J.; Stephen, C. Innovative Design and Performance Evaluation of Bionic Imprinting Toothed Wheel. Appl. Bionics Biomech. 2018, 2018, 9806287. [Google Scholar] [CrossRef] [PubMed]
- Tong, J.; Ji, W.; Jia, H.; Chen, D.; Yang, X. Design and tests of biomimetic blades for soil-rototilling and stubble-breaking. J. Bionic Eng. 2015, 12, 495–503. [Google Scholar] [CrossRef]
- Zhu, D.; Zhang, X.; Ding, H. Tool wear characteristics in machining of nickel-based superalloys. Int. J. Mach. Tools Manuf. 2013, 64, 60–77. [Google Scholar] [CrossRef]
- Mishnaevsky, L.; Hasager, C.B.; Bak, C.; Tilg, A.-M.; Bech, J.I.; Rad, S.D.; Fæster, S. Leading edge erosion of wind turbine blades: Understanding, prevention and protection. Renew. Energy 2021, 169, 953–969. [Google Scholar] [CrossRef]
- Vadivel, H.S.; Somberg, J.; Kalin, M.; Emami, N. Tribological performance of aUHMWPE-based multiscale composite under different lubrication and loads. Lubr. Sci. 2022, 34, 480–492. [Google Scholar] [CrossRef]
- Viswanathan, R.; Bakker, W. Materials for ultrasupercritical coal power plants—Turbine materials: Part II. J. Mater. Eng. Perform. 2001, 10, 96–101. [Google Scholar] [CrossRef]
- Yang, X.; Xia, R.; Zhou, H.; Guo, L.; Zhang, L. Bionic surface design of cemented carbide drill bit. Sci. China Technol. Sci. 2016, 59, 175–182. [Google Scholar] [CrossRef]
- Lu, J.; Wang, X.; Huang, Y.; Zhou, C.; Xu, B.; Fu, Q. Fabrication and cutting performance of bionic micro-serrated scalpels based on the miscanthus leaves. Tribol. Int. 2020, 145, 106162. [Google Scholar] [CrossRef]
- Dutour, M.; Sikiri, S.; Antoniac, I.V.; Arango-Santander, S. Bioinspired Topographic Surface Modification of Biomaterials. Materials 2022, 15, 2383. [Google Scholar] [CrossRef]
- Jiang, W. Bio-inspired self-sharpening cutting tool surface for finish hard turning of steel. CIRP Ann. 2014, 63, 517–520. [Google Scholar] [CrossRef]
- Lv, J.; Song, Y.; Jiang, L.; Wang, J. Bio-inspired strategies for anti-icing. ACS Nano 2014, 8, 3152–3169. [Google Scholar] [CrossRef] [PubMed]
- Fu, Y.F.; Yuan, C.Q.; Bai, X.Q. Marine drag reduction of shark skin inspired riblet surfaces. Biosurf. Biotribol. 2017, 3, 11–24. [Google Scholar] [CrossRef]
- El-Atab, N.; Babatain, W.; Bahabry, R.; Alshanbari, R.; Shamsuddin, R.; Hussain, M.M. Ultraflexible Corrugated Monocrystalline Silicon Solar Cells with High Efficiency (19%), Improved Thermal Performance, and Reliability Using Low-Cost Laser Patterning. ACS Appl. Mater. Interfaces 2020, 12, 2269–2275. [Google Scholar] [CrossRef] [PubMed]
- Luo, Y.; Yuan, L.; Li, J.; Wang, J. Boundary layer drag reduction research hypotheses derived from bio-inspired surface and recent advanced applications. Micron 2015, 79, 59–73. [Google Scholar] [CrossRef] [PubMed]
- Zhang, D.; Guo, D.; Wang, F.; Dong, H.; Wang, Z. Low-velocity impact response of a novel bionic turtle shell back armor sandwich structure. J. Mater. Res. Technol. 2024, 29, 910–923. [Google Scholar] [CrossRef]
- San Ha, N.; Lu, G. A review of recent research on bio-inspired structures and materials for energy absorption applications. Compos. Part B Eng. 2020, 181, 107496. [Google Scholar] [CrossRef]
- Tilly, G.; Sage, W. The interaction of particle and material behaviour in erosion processes. Wear 1970, 16, 447–465. [Google Scholar] [CrossRef]
- Zhou, L.; Zhang, H.; Ju, G.; Su, C.; Shen, H.; Zhao, X. Bio-inspired “rigid and flexible” structure design for robust superhydrophobic composite and its application. Compos. Sci. Technol. 2023, 243, 110244. [Google Scholar] [CrossRef]
- Rahmani, R.; Karimi, J.; Kamboj, N.; Kumar, R.; Brojan, M.; Tchórz, A.; Skrabalak, G.; Lopes, S.I. Fabrication of localized diamond-filled copper structures via selective laser melting and spark plasma sintering. Diam. Relat. Mater. 2023, 136, 109916. [Google Scholar] [CrossRef]
- Rahmani, R.; Kamboj, N.; Brojan, M.; Antonov, M.; Prashanth, K.G. Hybrid metal-ceramic biomaterials fabricated through powder bed fusion and powder metallurgy for improved impact resistance of craniofacial implants. Materialia 2022, 24, 101465. [Google Scholar] [CrossRef]
- Han, Z.; Yin, W.; Zhang, J.; Jiang, J.; Niu, S.; Ren, L. Erosion-Resistant Surfaces Inspired by Tamarisk. J. Bionic Eng. 2013, 10, 479–487. [Google Scholar] [CrossRef]
- Zidane, I.F.; Saqr, K.M.; Swadener, G.; Ma, X.; Shehadeh, M.F. On the role of surface roughness in the aerodynamic performance and energy conversion of horizontal wind turbine blades: A review. Int. J. Energy Res. 2016, 40, 2054–2077. [Google Scholar] [CrossRef]
- Li, Y.; Yang, Y.; Li, R.; Tang, X.; Guo, D.; Qing, Y.; Qin, Y. Enhanced antibacterial properties of orthopedic implants by titanium nanotube surface modification: A review of current techniques. Int. J. Nanomed. 2019, 14, 7217–7236. [Google Scholar] [CrossRef] [PubMed]
- Guo, Z.; Xie, X.; Yuan, C.; Bai, X. Study on influence of micro convex textures on tribological performances of UHMWPE material under the water-lubricated conditions. Wear 2019, 426–427, 1327–1335. [Google Scholar] [CrossRef]
- Li, A.; Su, F.; Chu, P.K.; Sun, J. Articular cartilage inspired bilayer coating on Ti6Al4V alloy with low friction and high load-bearing properties. Appl. Surf. Sci. 2020, 515, 146065. [Google Scholar] [CrossRef]
- Liu, G.; Zhang, P.; Liu, Y.; Zhang, D.; Chen, H. Self-Lubricanting Slippery Surface with Wettability Gradients for Anti-Sticking of Electrosurgical Scalpel. Micromachines 2018, 9, 591. [Google Scholar] [CrossRef] [PubMed]
- Kumar, R.; Torres, H.; Aydinyan, S.; Antonov, M.; Varga, M.; Hussainova, I.; Ripoll, M.R. Tribological behavior of Ni-based self-lubricating claddings containing sulfide of nickel, copper, or bismuth at temperatures up to 600 °C. Surf. Coat. Technol. 2023, 456, 129270. [Google Scholar] [CrossRef]
- Bhushan, B. Biomimetics: Lessons from nature—An overview. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2009, 367, 1445–1486. [Google Scholar] [CrossRef]
- Katiyar, N.K.; Goel, G.; Hawi, S.; Goel, S. Nature-inspired materials: Emerging trends and prospects. NPG Asia Mater. 2021, 13, 56. [Google Scholar] [CrossRef]
- Stute, F.; Mici, J.; Chamberlain, L.; Lipson, H. Digital Wood: 3D Internal Color Texture Mapping. 3D Print. Addit. Manuf. 2018, 5, 285–291. [Google Scholar] [CrossRef]
- Gibson, L.; Ashby, M.; Harley, B. Cellular Materials in Nature and Medicine; Cambridge University Press: Cambridge, UK, 2010. [Google Scholar]
- Murphy, C.M.; Haugh, M.G.; O’Brien, F.J. The effect of mean pore size on cell attachment, proliferation and migration in collagen–glycosaminoglycan scaffolds for bone tissue engineering. Biomaterials 2010, 31, 461–466. [Google Scholar] [CrossRef] [PubMed]
- Park, J.; Lee, Y.; Ha, M.; Cho, S.; Ko, H. Micro/nanostructured surfaces for self-powered and multifunctional electronic skins. J. Mater. Chem. B 2016, 4, 2999–3018. [Google Scholar] [CrossRef]
- Wilson, D.J.; Lin, Z.; Bower, D.Q.; Deravi, L.F. Engineering color, pattern, and texture: From nature to materials. Matter 2021, 4, 2163–2171. [Google Scholar] [CrossRef]
- Zhu, B.; Noack, M.; Merindol, R.; Barner-Kowollik, C.; Walther, A. Light-Adaptive Supramolecular Nacre-Mimetic Nanocomposites. Nano Lett. 2016, 16, 5176–5182. [Google Scholar] [CrossRef] [PubMed]
- Pang, C.; Kwak, M.K.; Lee, C.; Jeong, H.E.; Bae, W.-G.; Suh, K.Y. Nano meets beetles from wing to tiptoe: Versatile tools for smart and reversible adhesions. Nano Today 2012, 7, 496–513. [Google Scholar] [CrossRef]
- Mayer, G. Rigid biological systems as models for synthetic composites. Science 2005, 310, 1144–1147. [Google Scholar] [CrossRef] [PubMed]
- Qu, J.; Teeple, C.B.; Oldham, K.R. Modeling Legged Microrobot Locomotion Based on Contact Dynamics and Vibration in Multiple Modes and Axes. J. Vib. Acoust. 2017, 139, 031013. [Google Scholar] [CrossRef]
- Li, Z.; Guo, Z. Bioinspired surfaces with wettability for antifouling application. Nanoscale 2019, 11, 22636–22663. [Google Scholar] [CrossRef] [PubMed]
- Jin, H.; Tian, L.; Bing, W.; Zhao, J.; Ren, L. Bioinspired marine antifouling coatings: Status, prospects, and future. Prog. Mater. Sci. 2022, 124, 100889. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, Y.; Zhou, S.; Wang, Y.; Wang, C.; Guo, W.; Lu, X.; Wang, L. Tailoring self-lubricating, wear-resistance, anticorrosion and antifouling properties of Ti/(Cu, MoS2)-DLC coating in marine environment by controlling the content of Cu dopant. Tribol. Int. 2020, 143, 106029. [Google Scholar] [CrossRef]
- Kumar, R.; Torres, H.; Aydinyan, S.; Antonov, M.; Varga, M.; Ripoll, M.R.; Hussainova, I. Microstructure and high temperature tribological behaviour of self-lubricating Ti-TiBx composite doped with Ni Bi. Surf. Coat. Technol. 2022, 447, 128827. [Google Scholar] [CrossRef]
- Li, S.; An, Y.; Zhao, X.; Zhou, H.; Chen, J.; Hou, G. Bioinspired Smart Coating with Superior Tribological Performance. ACS Appl. Mater. Interfaces 2017, 9, 16745–16749. [Google Scholar] [CrossRef] [PubMed]
- Fu, X.; Tian, L.; Fan, Y.; Ye, W.; Qiao, Z.-A.; Zhao, J.; Ren, L.; Ming, W. Stimuli-responsive self-healing anticorrosion coatings: From single triggering behavior to synergetic multiple protections. Mater. Today Chem. 2021, 22, 100575. [Google Scholar] [CrossRef]
- Chopra, D.; Gulati, K.; Ivanovski, S. Bed of nails: Bioinspired nano-texturing towards antibacterial and bioactivity functions. Mater. Today Adv. 2021, 12, 100176. [Google Scholar] [CrossRef]
- Parodi, A.; Molinaro, R.; Sushnitha, M.; Evangelopoulos, M.; Martinez, J.O.; Arrighetti, N.; Corbo, C.; Tasciotti, E. Bio-inspired engineering of cell- and virus-like nanoparticles for drug delivery. Biomaterials 2017, 147, 155–168. [Google Scholar] [CrossRef]
- Martinez, J.O.; Brown, B.S.; Quattrocchi, N.; Evangelopoulos, M.; Ferrari, M.; Tasciotti, E. Multifunctional to multistage delivery systems: The evolution of nanoparticles for biomedical applications. Chin. Sci. Bull. 2012, 57, 3961–3971. [Google Scholar] [CrossRef]
- Yoo, J.-W.; Irvine, D.J.; Discher, D.E.; Mitragotri, S. Bio-inspired, bioengineered and biomimetic drug delivery carriers. Nat. Rev. Drug Discov. 2011, 10, 521–535. [Google Scholar] [CrossRef] [PubMed]
- Kim, H.N.; Jiao, A.; Hwang, N.S.; Kim, M.S.; Kang, D.H.; Kim, D.-H.; Suh, K.-Y. Nanotopography-guided tissue engineering and regenerative medicine. Adv. Drug Deliv. Rev. 2013, 65, 536–558. [Google Scholar] [CrossRef]
- Walsh, L.A.; Allen, J.L.; Desai, T.A. Nanotopography applications in drug delivery. Expert Opin. Drug Deliv. 2015, 12, 1823–1827. [Google Scholar] [CrossRef]
- Finbloom, J.A.; Huynh, C.; Huang, X.; Desai, T.A. Bioinspired nanotopographical design of drug delivery systems. Nat. Rev. Bioeng. 2023, 1, 139–152. [Google Scholar] [CrossRef]
- Alvarez-Lorenzo, C.; Concheiro, A. Bioinspired drug delivery systems. Curr. Opin. Biotechnol. 2013, 24, 1167–1173. [Google Scholar] [CrossRef] [PubMed]
- Yang, X.; Zhang, W.; Qin, X.; Cui, M.; Guo, Y.; Wang, T.; Wang, K.; Shi, Z.; Zhang, C.; Li, W.; et al. Recent Progress on Bioinspired Antibacterial Surfaces for Biomedical Application. Biomimetics 2022, 7, 88. [Google Scholar] [CrossRef] [PubMed]
- Glinel, K.; Thebault, P.; Humblot, V.; Pradier, C.; Jouenne, T. Antibacterial surfaces developed from bio-inspired approaches. Acta Biomater. 2012, 8, 1670–1684. [Google Scholar] [CrossRef] [PubMed]
- Han, Z.; Wang, Z.; Feng, X.; Li, B.; Mu, Z.; Zhang, J.; Niu, S.; Ren, L. Antireflective surface inspired from biology: A review. Biosurf. Biotribol. 2016, 2, 137–150. [Google Scholar] [CrossRef]
- Borodich, F.M.; Savencu, O. Hierarchical Models of Engineering Rough Surfaces and Bio-Inspired Adhesives. In Bio-Inspired Structured Adhesives; Springer: Cham, Switzerland, 2017; pp. 179–219. [Google Scholar] [CrossRef]
- The Biomimicry Institute—Nature-Inspired Innovation. Available online: https://biomimicry.org/ (accessed on 14 February 2024).
- Hofmann, D.C.; Kolodziejska, J.; Roberts, S.; Otis, R.; Dillon, R.P.; Suh, J.-O.; Liu, Z.-K.; Borgonia, J.-P. Compositionally graded metals: A new frontier of additive manufacturing. J. Mater. Res. 2014, 29, 1899–1910. [Google Scholar] [CrossRef]
- Dimas, L.S.; Bratzel, G.H.; Eylon, I.; Buehler, M.J. Tough Composites Inspired by Mineralized Natural Materials: Computation, 3D printing, and Testing. Adv. Funct. Mater. 2013, 23, 4629–4638. [Google Scholar] [CrossRef]
- Yang, Y.; Song, X.; Li, X.; Chen, Z.; Zhou, C.; Zhou, Q.; Chen, Y. Recent Progress in Biomimetic Additive Manufacturing Technology: From Materials to Functional Structures. Adv. Mater. 2018, 30, e1706539. [Google Scholar] [CrossRef]
- Bandyopadhyay, A.; Traxel, K.D.; Bose, S. Nature-inspired materials and structures using 3D Printing. Mater. Sci. Eng. R Rep. 2021, 145, 100609. [Google Scholar] [CrossRef] [PubMed]
- Greco, L.; Buccino, F.; Xu, Z.; Vergani, L.; Berto, F.; Guagliano, M.; Razavi, N.; Bagherifard, S. Design and analysis of energy absorbent bioinspired lattice structures. J. Bionic Eng. 2023, 20, 1670–1686. [Google Scholar] [CrossRef]
- Yang, J.; Gu, D.; Lin, K.; Zhang, Y.; Guo, M.; Yuan, L.; Zhang, H.; Zhang, H. Laser Additive Manufacturing of Bio-inspired Metallic Structures. Chin. J. Mech. Eng. Addit. Manuf. Front. 2022, 1, 100013. [Google Scholar] [CrossRef]
- Velasco-Hogan, A.; Xu, J.; Meyers, M.A.; Velasco-Hogan, A.; Meyers, M.A.; Xu, J. Additive Manufacturing as a Method to Design and Optimize Bioinspired Structures. Adv. Mater. 2018, 30, 1800940. [Google Scholar] [CrossRef] [PubMed]
- Kumar, R.; Antonov, M.; Beste, U.; Goljandin, D. Assessment of 3D printed steels and composites intended for wear applications in abrasive, dry or slurry erosive conditions. Int. J. Refract. Met. Hard Mater. 2020, 86, 105126. [Google Scholar] [CrossRef]
- Li, P.; Dou, X.; Feng, C.; Schönherr, H. Enhanced cell adhesion on a bio-inspired hierarchically structured polyester modified with gelatin-methacrylate. Biomater. Sci. 2018, 6, 785–792. [Google Scholar] [CrossRef] [PubMed]
- Yoon, E.-S.; Singh, R.; Kong, H.; Kim, B.; Kim, D.-H.; Jeong, H.; Suh, K. Tribological properties of bio-mimetic nano-patterned polymeric surfaces on silicon wafer. Tribol. Lett. 2006, 21, 31–37. [Google Scholar] [CrossRef]
- Wang, C.; Shao, R.; Wang, G.; Sun, S. Hierarchical hydrophobic surfaces with controlled dual transition between rose petal effect and lotus effect via structure tailoring or chemical modification. Colloids Surf. A Physicochem. Eng. Asp. 2021, 622, 126661. [Google Scholar] [CrossRef]
- Maurya, H.; Kollo, L.; Juhani, K.; Sergejev, F.; Prashanth, K. Effect of preheating and cooling of the powder bed by laser pulse shaping on the microstructure of the TiC based cermets. Ceram. Int. 2022, 48, 20612–20618. [Google Scholar] [CrossRef]
- Li, W.; Yu, Y.; Huang, R.; Wang, X.; Lai, P.; Chen, K.; Shang, L.; Zhao, Y. Multi-Bioinspired Functional Conductive Hydrogel Patches for Wound Healing Management. Adv. Sci. 2023, 10, e2301479. [Google Scholar] [CrossRef]
- Han, Z.; Fu, J.; Feng, X.; Niu, S.; Zhang, J.; Ren, L. Bionic anti-adhesive electrode coupled with maize leaf microstructures and TiO2 coating. RSC Adv. 2017, 7, 45287–45293. [Google Scholar] [CrossRef]
- Zhang, P.; Liu, G.; Zhang, D.; Chen, H. Liquid-Infused Surfaces on Electrosurgical Instruments with Exceptional Antiadhesion and Low-Damage Performances. ACS Appl. Mater. Interfaces 2018, 10, 33713–33720. [Google Scholar] [CrossRef]
- Ashammakhi, N.; Ahadian, S.; Zengjie, F.; Suthiwanich, K.; Lorestani, F.; Orive, G.; Ostrovidov, S.; Khademhosseini, A. Advances and Future Perspectives in 4D Bioprinting. Biotechnol. J. 2018, 13, e1800148. [Google Scholar] [CrossRef]
- YWang, Y.; Zheng, G.; Jiang, N.; Ying, G.; Li, Y.; Cai, X.; Meng, J.; Mai, L.; Guo, M.; Zhang, Y.S.; et al. Nature-inspired micropatterns. Nat. Rev. Methods Prim. 2023, 3, 68. [Google Scholar] [CrossRef]
- Hazell, G.; Fisher, L.E.; Murray, W.A.; Nobbs, A.H.; Su, B. Bioinspired bactericidal surfaces with polymer nanocone arrays. J. Colloid Interface Sci. 2018, 528, 389–399. [Google Scholar] [CrossRef] [PubMed]
- Sánchez, J.; Toro, A.; Estupiñán, H.; Leighton, G.; Endrino, J. Fabrication of bio-inspired deterministic surfaces by photochemical machining for tribological applications. Tribol. Int. 2020, 150, 106341. [Google Scholar] [CrossRef]
- Skorb, E.V.; Möhwald, H. Ultrasonic approach for surface nanostructuring. Ultrason. Sonochem. 2016, 29, 589–603. [Google Scholar] [CrossRef] [PubMed]
- Ren, L.; Zhou, X.; Liu, Q.; Liang, Y.; Song, Z.; Zhang, B.; Li, B. 3D magnetic printing of bio-inspired composites with tunable mechanical properties. J. Mater. Sci. 2018, 53, 14274–14286. [Google Scholar] [CrossRef]
- May, R.M.; Hoffman, M.G.; Sogo, M.J.; Parker, A.E.; O’toole, G.A.; Brennan, A.B.; Reddy, S.T. Micro-patterned surfaces reduce bacterial colonization and biofilm formation in vitro: Potential for enhancing endotracheal tube designs. Clin. Transl. Med. 2014, 3, 8. [Google Scholar] [CrossRef] [PubMed]
- Agarwal, K.; Sahay, R.; Baji, A.; Budiman, A.S. Impact-Resistant and Tough Helicoidally Aligned Ribbon Reinforced Composites with Tunable Mechanical Properties via Integrated Additive Manufacturing Methodologies. ACS Appl. Polym. Mater. 2020, 2, 3491–3504. [Google Scholar] [CrossRef]
- Min, L.; Pan, H.; Chen, S.; Wang, C.; Wang, N.; Zhang, J.; Cao, Y.; Chen, X.; Hou, X. Recent progress in bio-inspired electrospun materials. Compos. Commun. 2019, 11, 12–20. [Google Scholar] [CrossRef]
- del Campo, A.; Greiner, C.; Arzt, E. Contact Shape Controls Adhesion of Bioinspired Fibrillar Surfaces. Langmuir 2007, 23, 10235–10243. [Google Scholar] [CrossRef] [PubMed]
- Kraus, T.; Brodoceanu, D.; Pazos-Perez, N.; Fery, A. Colloidal Surface Assemblies: Nanotechnology Meets Bioinspiration. Adv. Funct. Mater. 2013, 23, 4529–4541. [Google Scholar] [CrossRef]
- Kandemir, S.; Yöyler, S.; Kumar, R.; Antonov, M.; Dieringa, H. Effect of Graphene Nanoplatelet Content on Mechanical and Elevated-Temperature Tribological Performance of Self-Lubricating ZE10 Magnesium Alloy Nanocomposites. Lubricants 2024, 12, 52. [Google Scholar] [CrossRef]
- Rosenkranz, A.; Costa, H.L.; Baykara, M.Z.; Martini, A. Synergetic effects of surface texturing and solid lubricants to tailor friction and wear—A review. Tribol. Int. 2021, 155, 106792. [Google Scholar] [CrossRef]
- Kumar, R.; Antonov, M.; Liu, L.; Hussainova, I. Sliding wear performance of in-situ spark plasma sintered Ti-TiBw composite at temperatures up to 900 °C. Wear 2021, 476, 203663. [Google Scholar] [CrossRef]
- Abdel-Aal, H.A.; El Mansori, M.; Mezghani, S. Multi-scale investigation of surface topography of ball python (python regius) shed skin in comparison to human skin. Tribol. Lett. 2010, 37, 517–527. [Google Scholar] [CrossRef]
- Filippov, A.E.; Gorb, S.N. Modelling of the frictional behaviour of the snake skin covered by anisotropic surface nanostructures. Sci. Rep. 2016, 6, 23539. [Google Scholar] [CrossRef] [PubMed]
- Bapat, S.; Tiner, C.; Rajurkar, K.; Nath, S.; Atre, S.; Malshe, A. Understanding biologicalisation of the snake-skin inspired textures through additive manufacturing for mechanical traction. CIRP Ann. 2020, 69, 201–204. [Google Scholar] [CrossRef]
- Schneider, J.; Djamiykov, V.; Greiner, C. Friction reduction through biologically inspired scale-like laser surface textures. Beilstein J. Nanotechnol. 2018, 9, 2561–2572. [Google Scholar] [CrossRef] [PubMed]
- Sánchez, J.C.; Estupiñan, H.A.; Toro, A. Friction response of bioinspired AISI 52100 steel surfaces texturized by photochemical machining. Surf. Topogr. Metrol. Prop. 2021, 9, 014001. [Google Scholar] [CrossRef]
- Greiner, C.; Schäfer, M. Bio-inspired scale-like surface textures and their tribological properties. Bioinspir. Biomim. 2015, 10, 044001. [Google Scholar] [CrossRef]
- Mühlberger, M.; Rohn, M.; Danzberger, J.; Sonntag, E.; Rank, A.; Schumm, L.; Kirchner, R.; Forsich, C.; Gorb, S.; Einwögerer, B.; et al. UV-NIL fabricated bio-inspired inlays for injection molding to influence the friction behavior of ceramic surfaces. Microelectron. Eng. 2015, 141, 140–144. [Google Scholar] [CrossRef]
- Kumar, M.; Ranjan, V.; Tyagi, R. Effect of Shape, Density, and an Array of Dimples on the Friction and Wear Performance of Laser Textured Bearing Steel under Dry Sliding. J. Mater. Eng. Perform. 2020, 29, 2827–2838. [Google Scholar] [CrossRef]
- Khan, M.A.; Gupta, K. A study on machinability of nickel based superalloy using micro-textured tungsten carbide cutting tools. Mater. Res. Express 2020, 7, 016537. [Google Scholar] [CrossRef]
- Thirunavukkarasu, N.; Peng, S.; Gunasekaran, H.B.; Yang, Z.; Wu, L.; Weng, Z. Responsive friction modulation of 3D printed elastomeric bioinspired structures. Tribol. Int. 2022, 175, 107823. [Google Scholar] [CrossRef]
- Erdemir, A. Review of engineered tribological interfaces for improved boundary lubrication. Tribol. Int. 2005, 38, 249–256. [Google Scholar] [CrossRef]
- Huang, W.; Wang, X. Biomimetic design of elastomer surface pattern for friction control under wet conditions. Bioinspir. Biomim. 2013, 8, 046001. [Google Scholar] [CrossRef] [PubMed]
- Wu, J.; Yu, A.; Chen, Q.; Wu, M.; Sun, L.; Yuan, J. Tribological properties of bronze surface with dimple textures fabricated by the indentation method. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2020, 234, 1680–1694. [Google Scholar] [CrossRef]
- Mzali, S.; Elwasli, F.; Mezlini, S.; Hajlaoui, K.; Alrasheedi, N.H. Tribological behavior of 3D printed biomimetic surfaces. Tribol. Int. 2024, 193, 109352. [Google Scholar] [CrossRef]
- Wang, B.; Yang, W.; Sherman, V.R.; Meyers, M.A. Pangolin armor: Overlapping, structure, and mechanical properties of the keratinous scales. Acta Biomater. 2016, 41, 60–74. [Google Scholar] [CrossRef] [PubMed]
- Tramsen, H.T.; Gorb, S.N.; Zhang, H.; Manoonpong, P.; Dai, Z.; Heepe, L. Inversion of friction anisotropy in a bio-inspired asymmetrically structured surface. J. R. Soc. Interface 2018, 15, 20170629. [Google Scholar] [CrossRef]
- Huang, Q.; Shi, X.; Xue, Y.; Zhang, K.; Wu, C. Wear-triggered self-repairing behavior of bionic textured AISI 4140 steel filled with multi-solid lubricants. Wear 2022, 504–505, 204416. [Google Scholar] [CrossRef]
- Huang, Q.; Shi, X.; Xue, Y.; Zhang, K.; Wu, C. Optimization of bionic textured parameter to improve the tribological performance of AISI 4140 self-lubricating composite through response surface methodology. Tribol. Int. 2021, 161, 107104. [Google Scholar] [CrossRef]
- Varenberg, M.; Gorb, S.N. Hexagonal Surface Micropattern for Dry and Wet Friction. Adv. Mater. 2009, 21, 483–486. [Google Scholar] [CrossRef]
- Drotlef, D.; Stepien, L.; Kappl, M.; Barnes, W.J.P.; Butt, H.; del Campo, A. Insights into the Adhesive Mechanisms of Tree Frogs using Artificial Mimics. Adv. Funct. Mater. 2013, 23, 1137–1146. [Google Scholar] [CrossRef]
- Federle, W.; Barnes, W.; Baumgartner, W.; Drechsler, P.; Smith, J. Wet but not slippery: Boundary friction in tree frog adhesive toe pads. J. R. Soc. Interface 2006, 3, 689–697. [Google Scholar] [CrossRef] [PubMed]
- Lu, G.; Lu, W.; Shi, X.; Zhai, W.; Zhang, J.; Yang, Z.; Chen, W. Tribological properties and self-compensating lubrication mechanisms of Ni3Al matrix bio-inspired shell-like composite structure. Appl. Surf. Sci. 2022, 573, 151462. [Google Scholar] [CrossRef]
- Wang, H.; Qiu, H.; Liu, W.; Tian, L.; Zheng, J.; Zhang, Z.; Zhou, Z. Anti-wear properties of multi-bioinspired textures with hierarchical and superhydrophobic structures under water lubrication. Wear 2023, 532, 205124. [Google Scholar] [CrossRef]
- Kumar, R.; Antonov, M.; Varga, M.; Hussainova, I.; Ripoll, M.R. Synergistic effect of Ag and MoS2 on high-temperature tribology of self-lubricating NiCrBSi composite coatings by laser metal deposition. Wear 2023, 532–533, 205114. [Google Scholar] [CrossRef]
- Kumar, R.; Aydinyan, S.; Ivanov, R.; Liu, L.; Antonov, M.; Hussainova, I. High-Temperature Wear Performance of hBN-Added Ni-W Composites Produced from Combustion-Synthesized Powders. Materials 2022, 15, 1252. [Google Scholar] [CrossRef]
- He, Y.; Zhang, Z.; Wang, Y.; Liu, M.; Yuan, J.; Li, P.; Yang, M.; Liu, W. Inspired with fish scale to manufacture biomimetic MXene derivative for the reinforcement on tribological and mechanical properties of PPS fabric/phenolic composites. Tribol. Int. 2023, 179, 108136. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, H.; Dai, S.; Dong, G. Designing a bioinspired scaly textured surface for improving the tribological behaviors of starved lubrication. Tribol. Int. 2022, 173, 107594. [Google Scholar] [CrossRef]
- Hoskins, J.K.; Zou, M. Designing a Bioinspired Surface for Improved Wear Resistance and Friction Reduction. J. Tribol. 2021, 143, 051107. [Google Scholar] [CrossRef]
- Tong, J.; Ma, Y.-H.; Ren, L.-Q.; Li, J.-Q. Tribological characteristics of pangolin scales in dry sliding. J. Mater. Sci. Lett. 2000, 19, 569–572. [Google Scholar] [CrossRef]
- Singh, R.A.; Pham, D.-C.; Kim, J.; Yang, S.; Yoon, E.-S. Bio-inspired dual surface modification to improve tribological properties at small-scale. Appl. Surf. Sci. 2009, 255, 4821–4828. [Google Scholar] [CrossRef]
- TNarayana, T.; Saleem, S.S. Enhancing fretting wear behavior of Ti64 alloy: The impact of surface textures and CrN-MoS2-Ag composite coating. Tribol. Int. 2024, 193, 109346. [Google Scholar] [CrossRef]
- Jiao, Y.; Liu, S.; Sun, Y.; Yue, W.; Zhang, H. Bioinspired Surface Functionalization of Nanodiamonds for Enhanced Lubrication. Langmuir 2018, 34, 12436–12444. [Google Scholar] [CrossRef]
- Liu, Y.; Wu, G.; de Groot, K. Biomimetic coatings for bone tissue engineering of critical-sized defects. J. R. Soc. Interface 2010, 7, S631–S647. [Google Scholar] [CrossRef]
- Bandyopadhyay, A.; Dittrick, S.; Gualtieri, T.; Wu, J.; Bose, S. Calcium phosphate–titanium composites for articulating surfaces of load-bearing implants. J. Mech. Behav. Biomed. Mater. 2016, 57, 280–288. [Google Scholar] [CrossRef] [PubMed]
- Li, W.; Thian, E.S.; Wang, M.; Wang, Z.; Ren, L. Surface Design for Antibacterial Materials: From Fundamentals to Advanced Strategies. Adv. Sci. 2021, 8, 2100368. [Google Scholar] [CrossRef]
- Nodoushan, E.J.; Ebrahimi, N.G.; Ayazi, M. An anti-bacterial approach to nanoscale roughening of biomimetic rice-like pattern PP by thermal annealing. Appl. Surf. Sci. 2017, 423, 1054–1061. [Google Scholar] [CrossRef]
- Liu, M.; Li, M.-T.; Xu, S.; Yang, H.; Sun, H.-B. Bioinspired Superhydrophobic Surfaces via Laser-Structuring. Front. Chem. 2020, 8, 835. [Google Scholar] [CrossRef]
- Jia, Z.; Xiu, P.; Li, M.; Xu, X.; Shi, Y.; Cheng, Y.; Wei, S.; Zheng, Y.; Xi, T.; Cai, H.; et al. Bioinspired anchoring AgNPs onto micro-nanoporous TiO2 orthopedic coatings: Trap-killing of bacteria, surface-regulated osteoblast functions and host responses. Biomaterials 2016, 75, 203–222. [Google Scholar] [CrossRef]
- Yan, H.; Wu, Q.; Yu, C.; Zhao, T.; Liu, M. Recent Progress of Biomimetic Antifouling Surfaces in Marine. Adv. Mater. Interfaces 2020, 7, 2000966. [Google Scholar] [CrossRef]
- Liu, Q.; Meng, F.; Wang, X.; Yang, B.; Tan, D.; Li, Q.; Shi, Z.; Shi, K.; Chen, W.; Liu, S.; et al. Tree Frog-Inspired Micropillar Arrays with Nanopits on the Surface for Enhanced Adhesion under Wet Conditions. ACS Appl. Mater. Interfaces 2020, 12, 19116–19122. [Google Scholar] [CrossRef]
- Watson, G.S.; Green, D.W.; Schwarzkopf, L.; Li, X.; Cribb, B.W.; Myhra, S.; Watson, J.A. A gecko skin micro/nano structure—A low adhesion, superhydrophobic, anti-wetting, self-cleaning, biocompatible, antibacterial surface. Acta Biomater. 2015, 21, 109–122. [Google Scholar] [CrossRef]
- Ibrahim, U.H.; Devnarain, N.; Govender, T. Biomimetic strategies for enhancing synthesis and delivery of antibacterial nanosystems. Int. J. Pharm. 2021, 596, 120276. [Google Scholar] [CrossRef]
- Bandara, C.D.; Singh, S.; Afara, I.O.; Wolff, A.; Tesfamichael, T.; Ostrikov, K.; Oloyede, A. Bactericidal Effects of Natural Nanotopography of Dragonfly Wing on Escherichia coli. ACS Appl. Mater. Interfaces 2017, 9, 6746–6760. [Google Scholar] [CrossRef] [PubMed]
- Bhushan, B.; Nosonovsky, M. The rose petal effect and the modes of superhydrophobicity. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2010, 368, 4713–4728. [Google Scholar] [CrossRef] [PubMed]
- Pu, X.; Li, G.; Huang, H. Preparation, anti-biofouling and drag-reduction properties of a biomimetic shark skin surface. Biol. Open 2016, 5, 389–396. [Google Scholar] [CrossRef]
- Lang, A.W.; Bradshaw, M.T.; Smith, J.A.; Wheelus, J.N.; Motta, P.J.; Habegger, M.L.; Hueter, R.E. Movable shark scales act as a passive dynamic micro-roughness to control flow separation. Bioinspir. Biomim. 2014, 9, 036017. [Google Scholar] [CrossRef]
- Negrini, N.C.; Toffoletto, N.; Farè, S.; Altomare, L. Plant Tissues as 3D Natural Scaffolds for Adipose, Bone and Tendon Tissue Regeneration. Front. Bioeng. Biotechnol. 2020, 8, 723. [Google Scholar] [CrossRef]
- Anselme, K.; Ploux, L.; Ponche, A. Cell/Material Interfaces: Influence of Surface Chemistry and Surface Topography on Cell Adhesion. J. Adhes. Sci. Technol. 2010, 24, 831–852. [Google Scholar] [CrossRef]
- Asha, A.B.; Chen, Y.; Zhang, H.; Ghaemi, S.; Ishihara, K.; Liu, Y.; Narain, R. Rapid Mussel-Inspired Surface Zwitteration for Enhanced Antifouling and Antibacterial Properties. Langmuir 2019, 35, 1621–1630. [Google Scholar] [CrossRef] [PubMed]
- Rasmussen, M.H.; Holler, K.R.; Baio, J.E.; Jaye, C.; Fischer, D.A.; Gorb, S.N.; Weidner, T. Evidence that gecko setae are coated with an ordered nanometre-thin lipid film. Biol. Lett. 2022, 18, 20220093. [Google Scholar] [CrossRef] [PubMed]
- Román-Kustas, J.; Hoffman, J.B.; Alonso, D.; Reed, J.H.; Gonsalves, A.E.; Oh, J.; Hong, S.; Jo, K.D.; Dana, C.E.; Alleyne, M.; et al. Analysis of cicada wing surface constituents by comprehensive multidimensional gas chromatography for species differentiation. Microchem. J. 2020, 158, 105089. [Google Scholar] [CrossRef]
- Guo, Z.; Liu, W.; Su, B.-L. Superhydrophobic surfaces: From natural to biomimetic to functional. J. Colloid Interface Sci. 2011, 353, 335–355. [Google Scholar] [CrossRef]
- Shahali, H.; Hasan, J.; Mathews, A.; Wang, H.; Yan, C.; Tesfamichael, T.; Yarlagadda, P.K.D.V. Multi-biofunctional properties of three species of cicada wings and biomimetic fabrication of nanopatterned titanium pillars. J. Mater. Chem. B 2019, 7, 1300–1310. [Google Scholar] [CrossRef] [PubMed]
- Kelleher, S.M.; Habimana, O.; Lawler, J.; O’reilly, B.; Daniels, S.; Casey, E.; Cowley, A. Cicada Wing Surface Topography: An Investigation into the Bactericidal Properties of Nanostructural Features. ACS Appl. Mater. Interfaces 2016, 8, 14966–14974. [Google Scholar] [CrossRef] [PubMed]
- Gao, A.; Yan, Y.; Li, T.; Liu, F. Biomimetic urchin-like surface based on poly (lactic acid) membrane for robust anti-wetting and anti-bacteria properties. Mater. Lett. 2019, 237, 240–244. [Google Scholar] [CrossRef]
- Li, W.; Zheng, Y.; Pang, W.; Lai, P. Bio-inspired adhesive hydrogel for wound healing. Biomed. Technol. 2023, 1, 65–72. [Google Scholar] [CrossRef]
- Shi, T.; Hou, X.; Guo, S.; Zhang, L.; Wei, C.; Peng, T.; Hu, X. Nanohole-boosted electron transport between nanomaterials and bacteria as a concept for nano–bio interactions. Nat. Commun. 2021, 12, 493. [Google Scholar] [CrossRef]
- Gao, Q.; Feng, T.; Huang, D.; Liu, P.; Lin, P.; Wu, Y.; Ye, Z.; Ji, J.; Huang, W. Antibacterial and hydroxyapatite-forming coating for biomedical implants based on polypeptide-functionalized titania nanospikes. Biomater. Sci. 2019, 8, 278–289. [Google Scholar] [CrossRef] [PubMed]
- Dou, X.Q.; Zhang, D.; Feng, C.; Jiang, L. Bioinspired Hierarchical Surface Structures with Tunable Wettability for Regulating Bacteria Adhesion. ACS Nano 2015, 9, 10664–10672. [Google Scholar] [CrossRef] [PubMed]
- Lin, W.; Klein, J. Recent Progress in Cartilage Lubrication. Adv. Mater. 2021, 33, 2005513. [Google Scholar] [CrossRef] [PubMed]
- Lin, P.; Zhang, R.; Wang, X.; Cai, M.; Yang, J.; Yu, B.; Zhou, F. Articular Cartilage Inspired Bilayer Tough Hydrogel Prepared by Interfacial Modulated Polymerization Showing Excellent Combination of High Load-Bearing and Low Friction Performance. ACS Macro Lett. 2016, 5, 1191–1195. [Google Scholar] [CrossRef] [PubMed]
- Lin, P.; Fu, D.; Zhang, T.; Ma, S.; Zhou, F. Microgel-Modified Bilayered Hydrogels Dramatically Boosting Load-Bearing and Lubrication. ACS Macro Lett. 2023, 12, 1450–1456. [Google Scholar] [CrossRef] [PubMed]
- Maksimkin, A.; Chukov, D.; Senatov, F.; Salimon, A. Comparative analysis of the tribological characteristics of canine joint cartilage and UHMWPE-based biomimetic materials. Mater. Lett. 2017, 191, 105–107. [Google Scholar] [CrossRef]
- Sun, J.; Li, A.; Su, F. Excellent Lubricating Ability of Functionalization Graphene Dispersed in Perfluoropolyether for Titanium Alloy. ACS Appl. Nano Mater. 2019, 2, 1391–1401. [Google Scholar] [CrossRef]
- Zhiwu, H.; Junqiu, Z.; Chao, G.; Li, W.; Ren, L. Erosion Resistance of Bionic Functional Surfaces Inspired from Desert Scorpions. Langmuir 2012, 28, 2914–2921. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Chen, W.; Yang, M.; Chen, S.; Zhu, B.; Niu, S.; Han, Z.; Wang, H. The Ingenious Structure of Scorpion Armor Inspires Sand-Resistant Surfaces. Tribol. Lett. 2017, 65, 110. [Google Scholar] [CrossRef]
- Harrington, E. Bumps and Grooves Protect Surface: Sahara Scorpion—Asknature. Asknature. Available online: https://asknature.org/strategy/bumps-and-grooves-protect-surface/ (accessed on 13 February 2024).
- Han, Z.; Zhu, B.; Yang, M.; Niu, S.; Song, H.; Zhang, J. The effect of the micro-structures on the scorpion surface for improving the anti-erosion performance. Surf. Coat. Technol. 2017, 313, 143–150. [Google Scholar] [CrossRef]
- Han, Z.; Feng, H.; Yin, W.; Niu, S.; Zhang, J.; Chen, D. An Efficient Bionic Anti-Erosion Functional Surface Inspired by Desert Scorpion Carapace. Tribol. Trans. 2015, 58, 357–364. [Google Scholar] [CrossRef]
- Han, Z.W.; Yang, M.K.; Yin, W.; Zhang, J.Q. Biomimetic Design and Manufacturing of Anti-Erosion Functional Surfaces Inspired from Desert Scorpion. Adv. Sci. Technol. 2017, 100, 187–196. [Google Scholar] [CrossRef]
- Wang, Z.; Zhang, Z.; Sun, Y.; Gao, K.; Liang, Y.; Li, X.; Ren, L. Wear behavior of bionic impregnated diamond bits. Tribol. Int. 2016, 94, 217–222. [Google Scholar] [CrossRef]
- Han, Z.; Yin, W.; Zhang, J.; Niu, S.; Ren, L. Active Anti-erosion Protection Strategy in Tamarisk (Tamarix aphylla). Sci. Rep. 2013, 3, 3429. [Google Scholar] [CrossRef] [PubMed]
- Zhang, S.; Zhang, J.; Yu, H.; Niu, S.; Lian, Z.; Xu, J.; Han, Z.; Ren, L. Large-area preparation strategy and anti-erosion mechanism for morphology-material coupled biomimetic anti-erosion functional surface. Wear 2023, 530, 205008. [Google Scholar] [CrossRef]
- Jung, S.; Yang, E.; Jung, W.; Kim, H.-Y. Anti-erosive mechanism of a grooved surface against impact of particle-laden flow. Wear 2018, 406–407, 166–172. [Google Scholar] [CrossRef]
- Paswan, S.K.; Singh, A.K. Analysis of surface finishing mechanism in a newly developed rotational magnetorheological honing process for its productivity improvement. Wear 2019, 426–427, 68–82. [Google Scholar] [CrossRef]
- Scarabaeus-Wikipedia. Available online: https://en.wikipedia.org/wiki/Scarabaeus (accessed on 13 February 2024).
- Fan, S.; Han, X.; Tang, Y.; Wang, Y.; Kong, X. Shark Skin—An Inspiration for the Development of a Novel and Simple Biomimetic Turbulent Drag Reduction Topology. Sustainability 2022, 14, 16662. [Google Scholar] [CrossRef]
- Martin, S.; Bhushan, B. Modeling and optimization of shark-inspired riblet geometries for low drag applications. J. Colloid Interface Sci. 2016, 474, 206–215. [Google Scholar] [CrossRef]
- Xiao, G.; He, Y.; Huang, Y.; Li, Q. Shark-Skin-Inspired Micro-Riblets Forming Mechanism of TC17 Titanium Alloy with Belt Grinding. IEEE Access 2019, 7, 107635–107647. [Google Scholar] [CrossRef]
- CBüttner, C.C.; Schulz, U. Shark skin inspired riblet structures as aerodynamically optimized high temperature coatings for blades of aeroengines. Smart Mater. Struct. 2011, 20, 094016. [Google Scholar] [CrossRef]
- Bechert, D.W.; Bruse, M.; Hage, W.; VAN DER Hoeven, J.G.T.; Hoppe, G. Experiments on drag-reducing surfaces and their optimization with an adjustable geometry. J. Fluid Mech. 1997, 338, 59–87. [Google Scholar] [CrossRef]
- Lang, A.; Habegger, M.L.; Motta, P. Shark Skin Drag Reduction. Encycl. Nanotechnol. 2015, 1–8. [Google Scholar] [CrossRef]
- Jo, S.; Ahn, S.; Lee, H.; Jung, C.-M.; Song, S.; Kim, D.R. Water-repellent Hybrid Nanowire and Micro-scale Denticle Structures on Flexible Substrates of Effective Air Retention. Sci. Rep. 2018, 8, 16631. [Google Scholar] [CrossRef]
- Han, Z.; Mu, Z.; Yin, W.; Li, W.; Niu, S.; Zhang, J.; Ren, L. Biomimetic multifunctional surfaces inspired from animals. Adv. Colloid Interface Sci. 2016, 234, 27–50. [Google Scholar] [CrossRef]
- Kleis, I.; Kulu, P. Solid Particle Erosion: Occurrence, Prediction and Control; Springer: Tallinn, Estonia, 2007. Available online: https://books.google.com/books?hl=en&lr=&id=NAWBg1jJJv4C&oi=fnd&pg=PR9&dq=particle+erosion+wear&ots=dVdCbdWFeK&sig=AEDbx5TXNC4Yb0mTbyUGEVOzr-Y (accessed on 4 February 2024).
- Finnie, I.; Stevick, G.; Ridgely, J. The influence of impingement angle on the erosion of ductile metals by angular abrasive particles. Wear 1992, 152, 91–98. [Google Scholar] [CrossRef]
- Finnie, I. Erosion of surfaces by solid particles. Wear 1960, 3, 87–103. [Google Scholar] [CrossRef]
- Oka, Y.; Matsumura, M.; Kawabata, T. Relationship between surface hardness and erosion damage caused by solid particle impact. Wear 1993, 162–164, 688–695. [Google Scholar] [CrossRef]
- Oka, Y.; Okamura, K.; Yoshida, T. Practical estimation of erosion damage caused by solid particle impact: Part 1: Effects of impact parameters on a predictive equation. Wear 2005, 259, 95–101. [Google Scholar] [CrossRef]
- Sun, F.; Xu, H. A review of biomimetic research for erosion wear resistance. Bio-Design Manuf. 2020, 3, 331–347. [Google Scholar] [CrossRef]
- Sınmazçelik, T.; Fidan, S.; Ürgün, S. Effects of 3D printed surface texture on erosive wear. Tribol. Int. 2020, 144, 106110. [Google Scholar] [CrossRef]
- Han, Z.; Zhang, J.; Ge, C.; Lü, Y.; Jiang, J.; Liu, Q.; Ren, L. Anti-Erosion Function in Animals and its Biomimetic Application. J. Bionic Eng. 2010, 7, S50–S58. [Google Scholar] [CrossRef]
- Jia, Z.; Yu, Y.; Hou, S.; Wang, L. Biomimetic architected materials with improved dynamic performance. J. Mech. Phys. Solids 2019, 125, 178–197. [Google Scholar] [CrossRef]
- Porter, M.M.; Adriaens, D.; Hatton, R.L.; Meyers, M.A.; McKittrick, J. Why the seahorse tail is square. Science 2015, 349, 6243. [Google Scholar] [CrossRef]
- Zheng, B.; Liu, Y.; Liu, J.; Yin, S.; Xu, J. Novel mechanical behaviors of DNA-inspired helical structures with chirality. Int. J. Mech. Sci. 2019, 161–162, 105025. [Google Scholar] [CrossRef]
- Han, S.; Chen, F.; Ye, H.; Zheng, Z.; Chen, L.; Wang, G. Bamboo-Inspired Renewable, High-Strength, Vibration-Damping Composites for Structural Applications. ACS Sustain. Chem. Eng. 2023, 11, 1146–1156. [Google Scholar] [CrossRef]
- Ha, N.S.; Lu, G.; Xiang, X. High energy absorption efficiency of thin-walled conical corrugation tubes mimicking coconut tree configuration. Int. J. Mech. Sci. 2018, 148, 409–421. [Google Scholar] [CrossRef]
- Zhang, W.; Yin, S.; Yu, T.; Xu, J. Crushing resistance and energy absorption of pomelo peel inspired hierarchical honeycomb. Int. J. Impact Eng. 2019, 125, 163–172. [Google Scholar] [CrossRef]
- Yu, W.; Zhu, K.; Aman, Y.; Guo, Z.; Xiong, S. Bio-inspired design of SiCf-reinforced multi-layered Ti-intermetallic composite. Mater. Des. 2016, 101, 102–108. [Google Scholar] [CrossRef]
- Lin, C.; Han, Y.; Guo, C.; Chang, Y.; Han, X.; Lan, L.; Jiang, F. Synthesis and mechanical properties of novel Ti-(SiCf/Al3Ti) ceramic-fiber-reinforced metal-intermetallic-laminated (CFR-MIL) composites. J. Alloys Compd. 2017, 722, 427–437. [Google Scholar] [CrossRef]
- Damiens, R.; Rhee, H.; Hwang, Y.; Park, S.; Hammi, Y.; Lim, H.; Horstemeyer, M. Compressive behavior of a turtle’s shell: Experiment, modeling, and simulation. J. Mech. Behav. Biomed. Mater. 2012, 6, 106–112. [Google Scholar] [CrossRef]
- Balani, K.; Patel, R.R.; Keshri, A.K.; Lahiri, D.; Agarwal, A. Multi-scale hierarchy of Chelydra serpentina: Microstructure and mechanical properties of turtle shell. J. Mech. Behav. Biomed. Mater. 2011, 4, 1440–1451. [Google Scholar] [CrossRef]
- Achrai, B.; Wagner, H.D. Micro-structure and mechanical properties of the turtle carapace as a biological composite shield. Acta Biomater. 2013, 9, 5890–5902. [Google Scholar] [CrossRef]
- Achrai, B.; Bar-On, B.; Wagner, H.D. Biological armors under impact—Effect of keratin coating, and synthetic bio-inspired analogues. Bioinspir. Biomim. 2015, 10, 016009. [Google Scholar] [CrossRef] [PubMed]
- Chen, Q.; Pugno, N.M. Bio-mimetic mechanisms of natural hierarchical materials: A review. J. Mech. Behav. Biomed. Mater. 2013, 19, 3–33. [Google Scholar] [CrossRef]
- Suresh Kumar, S.; Sankar, P.; S, V.K. Effect ofs bio-inspired surface pattern (Pangolin’s scales) and grooved mechanisms on the high velocity ballistic performance of aluminum 6061-T6 targets. Mech. Adv. Mater. Struct. 2022, 29, 4151–4169. [Google Scholar] [CrossRef]
- Ha, N.S.; Le, V.T.; Goo, N.S. Investigation of punch resistance of the Allomyrira dichtoloma beetle forewing. J. Bionic Eng. 2018, 15, 57–68. [Google Scholar] [CrossRef]
- Zhang, W.; Xu, J.; Yu, T. Dynamic behaviors of bio-inspired structures: Design, mechanisms, and models. Eng. Struct. 2022, 265, 114490. [Google Scholar] [CrossRef]
- Hao, P.; Du, J. Mechanical properties of bio-mimetic energy-absorbing materials under impact loading. J. Mater. Sci. 2018, 53, 3189–3197. [Google Scholar] [CrossRef]
- Xiang, J.; Du, J.; Li, D.; Scarpa, F. Numerical analysis of the impact resistance in aluminum alloy bi-tubular thin-walled structures designs inspired by beetle elytra. J. Mater. Sci. 2017, 52, 13247–13260. [Google Scholar] [CrossRef]
- San Ha, N.; Lu, G.; Xiang, X. Energy absorption of a bio-inspired honeycomb sandwich panel. J. Mater. Sci. 2019, 54, 6286–6300. [Google Scholar]
- Behera, R.P.; Le Ferrand, H. Impact-resistant materials inspired by the mantis shrimp’s dactyl club. Matter 2021, 4, 2831–2849. [Google Scholar] [CrossRef]
- De Falco, P.; Ongaro, F.; Pugno, N. Multi-hit damage and perforation of plates inspired by the attacks of the mantis shrimp. Mech. Mater. 2023, 181, 104587. [Google Scholar] [CrossRef]
- Yang, J.; Gu, D.; Lin, K.; Yuan, L.; Guo, M.; Zhang, H.; Liu, H. Laser powder bed fusion of mechanically efficient helicoidal structure inspired by mantis shrimp. Int. J. Mech. Sci. 2022, 231, 107573. [Google Scholar] [CrossRef]
- Taylor, J.R.A.; Scott, N.I.; Rouse, G.W. Evolution of mantis shrimp telson armour and its role in ritualized fighting. J. R. Soc. Interface 2019, 16, 20190203. [Google Scholar] [CrossRef] [PubMed]
- Yang, B.; Chen, W.; Xin, R.; Zhou, X.; Tan, D.; Ding, C.; Wu, Y.; Yin, L.; Chen, C.; Wang, S.; et al. Pomelo Peel-Inspired 3D-Printed Porous Structure for Efficient Absorption of Compressive Strain Energy. J. Bionic Eng. 2022, 19, 448–457. [Google Scholar] [CrossRef]
- Chen, Y.; Jin, Z.; Kang, W.; Liu, Z.; Yang, W.; Li, Y. 3D printed bio-inspired self-similar carbon fiber reinforced composite sandwich structures for energy absorption. Compos. Sci. Technol. 2024, 248, 110453. [Google Scholar] [CrossRef]
- Prakash, V.A.; Bourchak, M.; Alshahrani, H.; Juhany, K.A. Development of cashew nut shell lignin-acrylonitrile butadiene styrene 3D printed core and industrial hemp/aluminized glass fiber epoxy biocomposite for morphing wing and unmanned aerial vehicle applications. Int. J. Biol. Macromol. 2023, 253, 127068. [Google Scholar] [CrossRef]
- Xiang, J.; Du, J. Energy absorption characteristics of bio-inspired honeycomb structure under axial impact loading. Mater. Sci. Eng. A 2017, 696, 283–289. [Google Scholar] [CrossRef]
- Zou, M.; Yu, Y.J.; Zhang, R.R.; Wei, C.G.; Wang, H.X. Simulation analysis of energy-absorption properties of thin-wall tube based on horn structure. Jilin Daxue Xuebao (Gongxueban)/J. Jilin Univ. Eng. Technol. Ed. 2015, 45, 1863–1868. [Google Scholar] [CrossRef]
- Zhou, J.; Liu, S.; Guo, Z.; Xu, S.; Song, J.; Zou, M. Study on the energy absorption performance of bionic tube inspired by yak horn. Mech. Adv. Mater. Struct. 2022, 29, 7246–7258. [Google Scholar] [CrossRef]
- Zhang, P.; Heyne, M.A.; To, A.C. Biomimetic staggered composites with highly enhanced energy dissipation: Modeling, 3D printing, and testing. J. Mech. Phys. Solids 2015, 83, 285–300. [Google Scholar] [CrossRef]
- Ko, K.; Jin, S.; Lee, S.E.; Hong, J.-W. Impact resistance of nacre-like composites diversely patterned by 3D printing. Compos. Struct. 2020, 238, 111951. [Google Scholar] [CrossRef]
- Gu, G.X.; Takaffoli, M.; Buehler, M.J. Hierarchically Enhanced Impact Resistance of Bioinspired Composites. Adv. Mater. 2017, 29, 1700060. [Google Scholar] [CrossRef] [PubMed]
- Meng, L.; Zhao, J.; Lan, X.; Yang, H.; Wang, Z. Multi-objective optimisation of bio-inspired lightweight sandwich structures based on selective laser melting. Virtual Phys. Prototyp. 2020, 15, 106–119. [Google Scholar] [CrossRef]
- Yu, X.; Pan, L.; Chen, J.; Zhang, X.; Wei, P. Experimental and numerical study on the energy absorption abilities of trabecular–honeycomb biomimetic structures inspired by beetle elytra. J. Mater. Sci. 2019, 54, 2193–2204. [Google Scholar] [CrossRef]
- Zhang, X.; Cai, Z.-B.; Li, W.; Zhu, M.-H. Understanding hydration effects on mechanical and impacting properties of turtle shell. J. Mech. Behav. Biomed. Mater. 2018, 78, 116–123. [Google Scholar] [CrossRef] [PubMed]
- Tasdemirci, A.; Akbulut, E.F.; Guzel, E.; Tuzgel, F.; Yucesoy, A.; Sahin, S.; Guden, M. Crushing behavior and energy absorption performance of a bio-inspired metallic structure: Experimental and numerical study. Thin-Walled Struct. 2018, 131, 547–555. [Google Scholar] [CrossRef]
- Xiao, Y.; Yin, H.; Fang, H.; Wen, G. Crashworthiness design of horsetail-bionic thin-walled structures under axial dynamic loading. Int. J. Mech. Mater. Des. 2016, 12, 563–576. [Google Scholar] [CrossRef]
- Bührig-Polaczek, A.; Fleck, C.; Speck, T.; Schüler, P.; Fischer, S.F.; Caliaro, M.; Thielen, M. Biomimetic cellular metals—Using hierarchical structuring for energy absorption. Bioinspir. Biomim. 2016, 11, 045002. [Google Scholar] [CrossRef]
- Lazarus, B.S.; Velasco-Hogan, A.; Río, T.G.-D.; Meyers, M.A.; Jasiuk, I. A review of impact resistant biological and bioinspired materials and structures. J. Mater. Res. Technol. 2020, 9, 15705–15738. [Google Scholar] [CrossRef]
- Edelsten, L.; Jeffrey, J.E.; Burgin, L.V.; Aspden, R.M. Viscoelastic deformation of articular cartilage during impact loading. Soft Matter 2010, 6, 5206–5212. [Google Scholar] [CrossRef]
- Zhu, Z.D.; Ma, G.J.; Wu, C.W.; Chen, Z. Numerical study of the impact response of woodpecker’s head. AIP Adv. 2012, 2, 42173. [Google Scholar] [CrossRef]
- Holmberg, K.; Laukkanen, A.; Ghabchi, A.; Rombouts, M.; Turunen, E.; Waudby, R.; Suhonen, T.; Valtonen, K.; Sarlin, E. Computational modelling based wear resistance analysis of thick composite coatings. Tribol. Int. 2014, 72, 13–30. [Google Scholar] [CrossRef]
- Spongey Cranium Absorbs Impact—Biological Strategy—AskNature. Available online: https://asknature.org/strategy/spongey-cranium-absorbs-impact/#jp-carousel-7917 (accessed on 27 February 2024).
- Van Wassenbergh, S.; Ortlieb, E.J.; Mielke, M.; Böhmer, C.; Shadwick, R.E.; Abourachid, A. Woodpeckers minimize cranial absorption of shocks. Curr. Biol. 2022, 32, 3189–3194.e4. [Google Scholar] [CrossRef]
- Yoon, S.-H.; Park, S. A mechanical analysis of woodpecker drumming and its application to shock-absorbing systems. Bioinspir. Biomim. 2011, 6, 016003. [Google Scholar] [CrossRef] [PubMed]
- Antonov, M.; Zahavi, A.; Kumar, R.; Tamre, M.; Klimczyk, P. Performance of Al2O3-cBN materials and the perspective of using hyperspectral imaging during cutting tests. Proc. Estonian Acad. Sci. 2021, 70, 524–532. [Google Scholar] [CrossRef]
- Yu, H.; Han, Z.; Zhang, J.; Zhang, S. Bionic design of tools in cutting: Reducing adhesion, abrasion or friction. Wear 2021, 482–483, 203955. [Google Scholar] [CrossRef]
- Lu, Y.; Liu, Y.; Li, X.; Kang, Y. A new method of drilling long boreholes in low permeability coal by improving its permeability. Int. J. Coal Geol. 2010, 84, 94–102. [Google Scholar] [CrossRef]
- Wang, Z.; Gao, K.; Sun, Y.; Zhang, Z.; Zhang, S.; Liang, Y.; Li, X.; Ren, L. Effects of bionic units in different scales on the wear behavior of bionic impregnated diamond bits. J. Bionic Eng. 2016, 13, 659–668. [Google Scholar] [CrossRef]
- Zhang, W.; Xiang, J.; Huang, R.; Liu, H. A review of bio-inspired geotechnics-perspectives from geomaterials, geo-components, and drilling & excavation strategies. Biogeotechnics 2023, 1, 100025. [Google Scholar] [CrossRef]
- Hu, Y.; Chen, X.; Chen, J.; Zhang, C.; Fu, W. The influence of crescent texture parameters on the axial force when drilling bone. Med. Eng. Phys. 2021, 87, 87–94. [Google Scholar] [CrossRef]
- Wang, C. Bionic design and test of polycrystalline diamond compact bit for hard rock drilling in coal mine. Adv. Mech. Eng. 2020, 12, 1687814020923180. [Google Scholar] [CrossRef]
- Banken, E.; Oeffner, J. Biomimetics for innovative and future-oriented space applications—A review. Front. Space Technol. 2023, 3, 1000788. [Google Scholar] [CrossRef]
- Zhang, Z.; Jia, H.; Sun, J. Bioinspired design of a ridging shovel with anti-adhesive and drag reducing. Adv. Mech. Eng. 2015, 7, 3. [Google Scholar] [CrossRef]
- Qaisrani, A.; Tong, J.; Ren, L.; Chen, B. The Effects of Unsmoothed Surfaces on Soil Adhesion and Draft of Bulldozing Plates. 1993. Available online: https://www.cabidigitallibrary.org/doi/full/10.5555/19932457271 (accessed on 10 February 2024).
- El Salem, A.; Zhang, G.; Wang, H.; Salem, H.M.; Abdalla, M.A.; Ghazy, A.A. The effect of integrating a bio-inspired convex structure with a low-surface energy polymer on soil adhesion and friction. J. Terramech. 2023, 109, 93–100. [Google Scholar] [CrossRef]
- Wang, L.; Zhou, Q. Surface hydrophobicity of slippery zones in the pitchers of two Nepenthes species and a hybrid. Sci. Rep. 2016, 6, 19907. [Google Scholar] [CrossRef]
- Zhang, P.; Chen, H.; Zhang, L.; Ran, T.; Zhang, D. Transparent self-cleaning lubricant-infused surfaces made with large-area breath figure patterns. Appl. Surf. Sci. 2015, 355, 1083–1090. [Google Scholar] [CrossRef]
- Espinosa, H.D.; Zaheri, A.; Nguyen, H.; Restrepo, D.; Daly, M.; Frank, M.; McKittrick, J. In situ Wear Study Reveals Role of Microstructure on Self-Sharpening Mechanism in Sea Urchin Teeth. Matter 2019, 1, 1246–1261. [Google Scholar] [CrossRef]
- Killian, C.E.; Metzler, R.A.; Gong, Y.; Churchill, T.H.; Olson, I.C.; Trubetskoy, V.; Christensen, M.B.; Fournelle, J.H.; De Carlo, F.; Cohen, S.; et al. Self-Sharpening Mechanism of the Sea Urchin Tooth. Adv. Funct. Mater. 2011, 21, 682–690. [Google Scholar] [CrossRef]
- Wang, R.Z.; Addadi, L.; Weiner, S. Design strategies of sea urchin teeth: Structure, composition and micromechanical relations to function. Philos. Trans. R. Soc. B Biol. Sci. 1997, 352, 469–480. [Google Scholar] [CrossRef]
- Foronda, E.; Ramírez-Gil, F.J.; Delgado-Mejía, Á.; Ballesteros, L.M.; Rudas, J.; Olmos-Villalba, L.C. Thermal enhancement of heat sinks with bio-inspired textured surfaces. Therm. Sci. Eng. Prog. 2023, 46, 102170. [Google Scholar] [CrossRef]
- RKumar, R.; Malaval, B.; Antonov, M.; Zhao, G. Performance of polyimide and PTFE based composites under sliding, erosive and high stress abrasive conditions. Tribol. Int. 2020, 147, 106282. [Google Scholar] [CrossRef]
- Yin, W.; Han, Z.; Feng, H.; Zhang, J.; Cao, H.; Tian, Y. Gas–Solid Erosive Wear of Biomimetic Pattern Surface Inspired from Plant. Tribol. Trans. 2017, 60, 159–165. [Google Scholar] [CrossRef]
- Liu, Q.; Mao, H.; Niu, L.; Chen, F.; Ma, P. Excellent flexibility and stab-resistance on pangolin-inspired scale-like structure composite for versatile protection. Compos. Commun. 2022, 35, 101266. [Google Scholar] [CrossRef]
- Su, Y.; Li, Z.; Li, L.; Wang, J.; Gao, H.; Wang, G. Cutting performance of micro-textured polycrystalline diamond tool in dry cutting. J. Manuf. Process. 2017, 27, 1–7. [Google Scholar] [CrossRef]
- Sharma, V.; Pandey, P.M. Recent advances in turning with textured cutting tools: A review. J. Clean. Prod. 2016, 137, 701–715. [Google Scholar] [CrossRef]
- Gundiah, N.; Jaddivada, S. Making the cut: Mechanics of cutting and steering of insect probes. Curr. Opin. Insect Sci. 2020, 42, 84–89. [Google Scholar] [CrossRef]
- Zhang, W.; Huang, R.; Xiang, J.; Zhang, N. Recent advances in bio-inspired geotechnics: From burrowing strategy to underground structures. Gondwana Res. 2024, 130, 1–17. [Google Scholar] [CrossRef]
- Ji, W.; Chen, D.; Jia, H.; Tong, J. Experimental Investigation into Soil-Cutting Performance of the Claws of Mole Rat (Scaptochirus moschatus). J. Bionic Eng. 2010, 7, S166–S171. [Google Scholar] [CrossRef]
- Morris, J.; Wang, Y.; Backeljau, T.; Chapelle, G. Biomimetic and bio-inspired uses of mollusc shells. Mar. Genom. 2016, 27, 85–90. [Google Scholar] [CrossRef]
- Bermejo, R. “Toward seashells under stress”: Bioinspired concepts to design tough layered ceramic composites. J. Eur. Ceram. Soc. 2017, 37, 3823–3839. [Google Scholar] [CrossRef]
- Gao, K.; Li, M.; Dong, B.; Sun, Y.; Sun, Y.; Liu, J. Bionic coupling polycrystalline diamond composite bit. Pet. Explor. Dev. 2014, 41, 533–537. [Google Scholar] [CrossRef]
- Malshe, A.; Rajurkar, K.; Samant, A.; Hansen, H.N.; Bapat, S.; Jiang, W. Bio-inspired functional surfaces for advanced applications. CIRP Ann. 2013, 62, 607–628. [Google Scholar] [CrossRef]
- Yu, H.; Zhang, J.; Zhang, S.; Han, Z. Bionic structures and materials inspired by plant leaves: A comprehensive review for innovative problem-solving. Prog. Mater. Sci. 2023, 139, 101181. [Google Scholar] [CrossRef]
- Qi, H.; Ma, Z.; Xu, Z.; Wang, S.; Ma, Y.; Wu, S.; Guo, M. The Design and Experimental Validation of a Biomimetic Stubble-Cutting Device Inspired by a Leaf-Cutting Ant’s Mandibles. Biomimetics 2023, 8, 555. [Google Scholar] [CrossRef] [PubMed]
- Jiang, Z.; Sun, J.; Xiong, Q.; Wang, L.; Li, J. Structural design of groove and micro-blade of the end mill in aluminum alloys machining based on bionics. Int. J. Adv. Manuf. Technol. 2017, 88, 3343–3356. [Google Scholar] [CrossRef]
- Drew, J.; Philipp, C.; Westneat, M.W. Shark Tooth Weapons from the 19th Century Reflect Shifting Baselines in Central Pacific Predator Assemblies. PLoS ONE 2013, 8, e59855. [Google Scholar] [CrossRef]
- Sea Urchin Teeth|California Academy of Sciences. Available online: https://www.calacademy.org/explore-science/sea-urchin-teeth (accessed on 24 February 2024).
- HMaurya, H.; Vikram, R.; Kumar, R.; Rahmani, R.; Juhani, K.; Sergejev, F.; Prashanth, K. EBSD investigation of microstructure and microtexture evolution on additively manufactured TiC-Fe based cermets—Influence of multiple laser scanning. Micron 2024, 180, 103613. [Google Scholar] [CrossRef]
- Xie, F.; Lei, X.B. The Influence of Bionic Micro-Texture’s Surface on Tool’s Cutting Performance. Key Eng. Mater. 2016, 693, 1155–1162. [Google Scholar] [CrossRef]
- Fatima, A.; Mativenga, P.T. On the comparative cutting performance of nature-inspired structured cutting tool in dry cutting of AISI/SAE 4140. Proc. Inst. Mech. Eng. Part B J. Eng. Manuf. 2015, 231, 1941–1948. [Google Scholar] [CrossRef]
- Wei, H.; Chen, G.; Chen, Z.; Yu, Z.; Huang, J. Progress on Bionic Textured Cutting Tools: A Review and Prospects. J. Bionic Eng. 2023, 21, 19–55. [Google Scholar] [CrossRef]
- Yu, Q.; Zhang, X.; Miao, X.; Liu, X.; Zhang, L. Performances of concave and convex microtexture tools in turning of Ti6Al4V with lubrication. Int. J. Adv. Manuf. Technol. 2020, 109, 1071–1092. [Google Scholar] [CrossRef]
- Siju, A.S.; Waigaonkar, S.D. Effects of rake surface texture geometries on the performance of single-point cutting tools in hard turning of titanium alloy. J. Manuf. Process. 2021, 69, 235–252. [Google Scholar] [CrossRef]
- Li, X.; Deng, J.; Lu, Y.; Duan, R.; Ge, D. Machinability Investigation and Sustainability Assessment of Dry Cutting AISI1045 Steel Using Tools Configured with Shark-Skin-Inspired Structures and WS2/C Coatings. Int. J. Precis. Eng. Manuf.-Green Technol. 2022, 9, 83–106. [Google Scholar] [CrossRef]
- Liu, Y.; Deng, J.; Wu, F.; Duan, R.; Zhang, X.; Hou, Y. Wear resistance of carbide tools with textured flank-face in dry cutting of green alumina ceramics. Wear 2017, 372–373, 91–103. [Google Scholar] [CrossRef]
- Gao, K.; Sun, Y.-H.; Ren, L.-Q.; Cao, P.-L.; Li, W.-T.; Fan, H.-K. Design and Analysis of Ternary Coupling Bionic Bits. J. Bionic Eng. 2008, 5, 53–59. [Google Scholar] [CrossRef]
- Zhang, P.; Zhang, L.; Chen, H.; Dong, Z.; Zhang, D. Surfaces Inspired by the Nepenthes Peristome for Unidirectional Liquid Transport. Adv. Mater. 2017, 29, 1702995. [Google Scholar] [CrossRef] [PubMed]
- Chen, H.; Zhang, P.; Zhang, L.; Liu, H.; Jiang, Y.; Zhang, D.; Han, Z.; Jiang, L. Continuous directional water transport on the peristome surface of Nepenthes alata. Nature 2016, 532, 85–89. [Google Scholar] [CrossRef] [PubMed]
- Sun, J.; Wang, Y.; Ma, Y.; Tong, J.; Zhang, Z. DEM simulation of bionic subsoilers (tillage depth >40 cm) with drag reduction and lower soil disturbance characteristics. Adv. Eng. Softw. 2018, 119, 30–37. [Google Scholar] [CrossRef]
- Tang, Q.; Guo, W.; Gao, K.; Gao, R.; Zhao, Y.; Sun, Y.; Zhou, Y. Design and test of a self-adaptive bionic polycrystalline diamond compact bit inspired by cat claw. Adv. Mech. Eng. 2018, 10, 1687814018810249. [Google Scholar] [CrossRef]
- Feng, Y.; Yuan, P.; Wang, L.; Zhang, J.; Zhang, J.; Zhou, X. Experimental investigation of different morphology textured ceramic tools by in-situ formed for the dry cutting. Int. J. Appl. Ceram. Technol. 2020, 17, 1108–1118. [Google Scholar] [CrossRef]
- Zhang, W.; Zhang, L.; Wang, B.; Wang, S. Finite element simulation analysis of bionic ball-end milling cutter. Int. J. Adv. Manuf. Technol. 2019, 103, 3151–3161. [Google Scholar] [CrossRef]
- Jia, H.; Li, C.; Zhang, Z.; Wang, G. Design of Bionic Saw Blade for Corn Stalk Cutting. J. Bionic Eng. 2013, 10, 497–505. [Google Scholar] [CrossRef]
- Jaggessar, A.; Shahali, H.; Mathew, A.; Yarlagadda, P.K.D.V. Bio-mimicking nano and micro-structured surface fabrication for antibacterial properties in medical implants. J. Nanobiotechnol. 2017, 15, 64. [Google Scholar] [CrossRef]
- Luo, Z.; Weiss, D.E.; Liu, Q.; Tian, B. Biomimetic approaches toward smart bio-hybrid systems. Nano Res. 2018, 11, 3009–3030. [Google Scholar] [CrossRef]
- Bjørge, I.M.; Correia, C.R.; Mano, J.F. Hipster microcarriers: Exploring geometrical and topographical cues of non-spherical microcarriers in biomedical applications. Mater. Horiz. 2022, 9, 908–933. [Google Scholar] [CrossRef]
- Kamboj, N.; Ressler, A.; Hussainova, I. Bioactive Ceramic Scaffolds for Bone Tissue Engineering by Powder Bed Selective Laser Processing: A Review. Materials 2021, 14, 5338. [Google Scholar] [CrossRef]
- Nierstrasz, V.A. Textile-based drug release systems. Smart Text. Med. Healthc. Mater. Syst. Appl. 2007, 50–73. [Google Scholar] [CrossRef]
- JZimmermann, J.; Reifler, F.A.; Fortunato, G.; Gerhardt, L.; Seeger, S. A Simple, One-Step Approach to Durable and Robust Superhydrophobic Textiles. Adv. Funct. Mater. 2008, 18, 3662–3669. [Google Scholar] [CrossRef]
- Gerhardt, L.-C.; Lottenbach, R.; Rossi, R.; Derler, S. Tribological investigation of a functional medical textile with lubricating drug-delivery finishing. Colloids Surf. B Biointerfaces 2013, 108, 103–109. [Google Scholar] [CrossRef]
- Guerra, C.; Schwartz, C.J. Investigation of the influence of textiles and surface treatments on blistering using a novel simulant. Ski. Res. Technol. 2012, 18, 94–100. [Google Scholar] [CrossRef] [PubMed]
- Wollina, U.; Heide, M.; Müller-Litz, W.; Obenauf, D.; Ash, J. Functional textiles in prevention of chronic wounds, wound healing and tissue engineering. Curr. Probl. Dermatol. 2003, 31, 82–97. [Google Scholar] [CrossRef]
- Tanner, T.; Marks, R. Delivering drugs by the transdermal route: Review and comment. Ski. Res. Technol. 2008, 14, 249–260. [Google Scholar] [CrossRef] [PubMed]
- Marian, M.; Shah, R.; Gashi, B.; Zhang, S.; Bhavnani, K.; Wartzack, S.; Rosenkranz, A. Exploring the Lubrication Mechanisms of Synovial Fluids for Joint Longevity—A Perspective. Colloids Surf. B Biointerfaces 2021, 206, 111926. [Google Scholar] [CrossRef] [PubMed]
- Sterner, O.; Karageorgaki, C.; Zürcher, M.; Zürcher, S.; Scales, C.W.; Fadli, Z.; Spencer, N.D.; Tosatti, S.G.P. Reducing Friction in the Eye: A Comparative Study of Lubrication by Surface-Anchored Synthetic and Natural Ocular Mucin Analogues. ACS Appl. Mater. Interfaces 2017, 9, 20150–22016. [Google Scholar] [CrossRef] [PubMed]
- Černohlávek, M.; Brandejsová, M.; Štěpán, P.; Vagnerová, H.; Hermannová, M.; Kopecká, K.; Kulhánek, J.; Nečas, D.; Vrbka, M.; Velebný, V.; et al. Insight into the Lubrication and Adhesion Properties of Hyaluronan for Ocular Drug Delivery. Biomolecules 2021, 11, 1431. [Google Scholar] [CrossRef] [PubMed]
- Yamasaki, K.; Drolle, E.; Nakagawa, H.; Hisamura, R.; Ngo, W.; Jones, L. Impact of a low molecular weight hyaluronic acid derivative on contact lens wettability. Contact Lens Anterior Eye 2021, 44, 101334. [Google Scholar] [CrossRef] [PubMed]
- Kathuria, A.; Shamloo, K.; Jhanji, V.; Sharma, A. Categorization of Marketed Artificial Tear Formulations Based on Their Ingredients: A Rational Approach for Their Use. J. Clin. Med. 2021, 10, 1289. [Google Scholar] [CrossRef] [PubMed]
- Morrison, S.B.; Sullivan, D.A.; Sullivan, B.D.; Sheardown, H.; Schmidt, T.A. Dose-Dependent and Synergistic Effects of Proteoglycan 4 on Boundary Lubrication at a Human Cornea–Polydimethylsiloxane Biointerface. Eye Contact Lens Sci. Clin. Pract. 2012, 38, 27–35. [Google Scholar] [CrossRef]
- Markoulli, M.; Kolanu, S. Contact lens wear and dry eyes: Challenges and solutions. Clin. Optom. 2017, 9, 41–48. [Google Scholar] [CrossRef]
- Kim, S.; Laschi, C.; Trimmer, B. Soft robotics: A bioinspired evolution in robotics. Trends Biotechnol. 2013, 31, 287–294. [Google Scholar] [CrossRef]
- Lamping, F.; Gorb, S.N.; de Payrebrune, K.M. Frictional Properties of a Novel Artificial Snakeskin for Soft Robotics. Biotribology 2022, 30, 100210. [Google Scholar] [CrossRef]
- Hao, T.; Xiao, H.; Liu, S.; Liu, Y. Fingerprint-inspired surface texture for the enhanced tip pinch performance of a soft robotic hand in lubricated conditions. Friction 2023, 11, 1349–1358. [Google Scholar] [CrossRef]
- Peng, Y.; Serfass, C.M.; Kawazoe, A.; Shao, Y.; Gutierrez, K.; Hill, C.N.; Santos, V.J.; Visell, Y.; Hsiao, L.C. Elastohydrodynamic friction of robotic and human fingers on soft micropatterned substrates. Nat. Mater. 2021, 20, 1707–1711. [Google Scholar] [CrossRef]
- Shen, Z.; Chen, F.; Zhu, X.; Yong, K.-T.; Gu, G. Stimuli-responsive functional materials for soft robotics. J. Mater. Chem. B 2020, 8, 8972–8991. [Google Scholar] [CrossRef]
- Gao, X.; Jiang, L. Water-repellent legs of water striders. Nature 2004, 432, 36. [Google Scholar] [CrossRef]
- Vyas, L.; Aquino, D.; Kuo, C.; Dai, J.S.; Dasgupta, P. Flexible Robotics. BJU Int. 2011, 107, 187–189. [Google Scholar] [CrossRef] [PubMed]
- Pfeifer, R.; Lungarella, M.; Iida, F. The challenges ahead for bio-inspired ‘soft’ robotics. Commun. ACM 2012, 55, 76–87. [Google Scholar] [CrossRef]
- Cianchetti, M.; Laschi, C.; Menciassi, A.; Dario, P. Biomedical applications of soft robotics. Nat. Rev. Mater. 2018, 3, 143–153. [Google Scholar] [CrossRef]
- Yoshida, K. Achievements in space robotics. IEEE Robot. Autom. Mag. 2009, 16, 20–28. [Google Scholar] [CrossRef]
- Li, X.; Chen, X.; Zhang, C.; Luo, J. Preparation of self-lubricating NiTi alloy and its self-adaptive behavior. Tribol. Int. 2019, 130, 43–51. [Google Scholar] [CrossRef]
- Yang, C.; Zhao, Y.; Tian, Y.; Wang, F.; Liu, X.; Jing, X. Fabrication and stability investigation of bio-inspired superhydrophobic surface on nitinol alloy. Colloids Surf. A Physicochem. Eng. Asp. 2019, 567, 16–26. [Google Scholar] [CrossRef]
- Tang, G.; Ho, J.K.; Dong, G.; Hua, M. Fabrication self-recovery bulge textures on TiNi shape memory alloy and its tribological properties in lubricated sliding. Tribol. Int. 2016, 96, 11–22. [Google Scholar] [CrossRef]
- NASA. New Commercial Robot Copies Geckos’ Toes. Available online: https://www.nasa.gov/technology/tech-transfer-spinoffs/new-commercial-robot-copies-geckos-toes/ (accessed on 23 February 2024).
- Li, H.; Li, Y.; Wu, J.; Jia, X.; Yang, J.; Shao, D.; Feng, L.; Wang, S.; Song, H. Bio-Inspired Hollow Carbon Microtubes for Multifunctional Photothermal Protective Coatings. ACS Appl. Mater. Interfaces 2022, 14, 29302–29314. [Google Scholar] [CrossRef] [PubMed]
- Dalili, N.; Edrisy, A.; Carriveau, R. A review of surface engineering issues critical to wind turbine performance. Renew. Sustain. Energy Rev. 2009, 13, 428–438. [Google Scholar] [CrossRef]
- Kim, M.S.; Lee, J.H.; Kwak, M.K. Review: Surface Texturing Methods for Solar Cell Efficiency Enhancement. Int. J. Precis. Eng. Manuf. 2020, 21, 1389–1398. [Google Scholar] [CrossRef]
- Verma, A.S.; Jiang, Z.; Ren, Z.; Caboni, M.; Verhoef, H.; van der Mijle-Meijer, H.; Castro, S.G.; Teuwen, J.J. A probabilistic long-term framework for site-specific erosion analysis of wind turbine blades: A case study of 31 Dutch sites. Wind. Energy 2021, 24, 1315–1336. [Google Scholar] [CrossRef]
- Niu, Y.; Hao, X.; Xia, A.; Wang, L.; Liu, Q.; Li, L.; He, N. Effects of textured surfaces on the properties of hydrodynamic bearing. Int. J. Adv. Manuf. Technol. 2022, 118, 1589–1596. [Google Scholar] [CrossRef]
- Das, L.; Hocker, S.J.A.; Wiesner, V.L.; Wohl, C.J. Bio-Inspired Surface Structures to Mitigate Interfacial Particle Adhesion and Erosion—A Review. In Proceedings of the 44th Annual Meeting of the Adhesion Society, Virtual, 22–25 February 2021; Langley Research Center: Hampton, VA, USA. [Google Scholar]
- Sun, X.; Jia, X.; Yang, J.; Wang, S.; Li, Y.; Shao, D.; Song, H. Bamboo fiber-reinforced chitosan sponge as a robust photothermal evaporator for efficient solar vapor generation. J. Mater. Chem. A 2021, 9, 23891–23901. [Google Scholar] [CrossRef]
- Kant, K.; Pitchumani, R. Erosion wear analysis of heat exchange surfaces in a falling particle-based concentrating solar power system. Sol. Energy Mater. Sol. Cells 2024, 266, 112629. [Google Scholar] [CrossRef]
- Mishnaevsky, L.; Branner, K.; Petersen, H.N.; Beauson, J.; McGugan, M.; Sørensen, B.F. Materials for Wind Turbine Blades: An Overview. Materials 2017, 10, 1285. [Google Scholar] [CrossRef] [PubMed]
- Dashtkar, A.; Hadavinia, H.; Sahinkaya, M.N.; Williams, N.A.; Vahid, S.; Ismail, F.; Turner, M. Rain erosion-resistant coatings for wind turbine blades: A review. Polym. Polym. Compos. 2019, 27, 443–475. [Google Scholar] [CrossRef]
- Wind Turbine Tech Inspired by Owl Feathers and Maple Seeds—Innovation—AskNature. Available online: https://asknature.org/innovation/wind-turbine-tech-inspired-by-owl-feathers-and-maple-seeds/ (accessed on 20 February 2024).
- Chen, L.; Zhang, Y.; Cui, Y.; Wang, J.; Wang, M. Effects of Snake-Bioinspired Surface Texture on the Finger-Sealing Performance under Varied Working Conditions. Machines 2022, 10, 569. [Google Scholar] [CrossRef]
- CKhatri, C.B.; Yadav, S.K.; Thakre, G.D.; Rajput, A.K. Design optimization of vein-bionic textured hydrodynamic journal bearing using genetic algorithm. Acta Mech. 2023, 235, 167–190. [Google Scholar] [CrossRef]
- Vadivel, H.S.; Golchin, A.; Emami, N. Tribological behaviour of carbon filled hybrid UHMWPE composites in water. Tribol. Int. 2018, 124, 169–177. [Google Scholar] [CrossRef]
- Li, X.; Guo, Z.; Huang, Q.; Yuan, C. Application of Bionic Tribology in Water-Lubricated Bearing: A Review. J. Bionic Eng. 2022, 19, 902–934. [Google Scholar] [CrossRef]
- Pattnayak, M.R.; Pandey, R.K.; Dutt, J.K. Performance improvement of an oil-lubricated journal bearing using bionic-textures fused micro-pockets. J. Tribol. 2022, 144, 041804. [Google Scholar] [CrossRef]
- Ji, M.; Zhang, H.; Xu, J.; Li, C.; Yu, D.; Chen, M.; El Mansori, M. Toward the mechanisms of surface texturing on the wear behavior of dental zirconia ceramics under dry and saliva lubricated conditions. Wear 2021, 484–485, 203845. [Google Scholar] [CrossRef]
- Xie, Z.; Zhang, Y.; Zhou, J.; Zhu, W. Theoretical and experimental research on the micro interface lubrication regime of water lubricated bearing. Mech. Syst. Signal Process. 2021, 151, 107422. [Google Scholar] [CrossRef]
- Metamaterial-Wikipedia. Available online: https://en.wikipedia.org/wiki/Metamaterial (accessed on 22 March 2024).
- Garland, A.P.; Adstedt, K.M.; Casias, Z.J.; White, B.C.; Mook, W.M.; Kaehr, B.; Jared, B.H.; Lester, B.T.; Leathe, N.S.; Schwaller, E.; et al. Coulombic friction in metamaterials to dissipate mechanical energy. Extreme Mech. Lett. 2020, 40, 100847. [Google Scholar] [CrossRef]
- Lehn, J.-M. Toward Self-Organization and Complex Matter. Science 2002, 295, 2400–2403. [Google Scholar] [CrossRef] [PubMed]
- Fox-Rabinovich, G.S.; Gershman, I.S.; Veldhuis, S. Thin-Film PVD Coating Metamaterials Exhibiting Similarities to Natural Processes under Extreme Tribological Conditions. Nanomaterials 2020, 10, 1720. [Google Scholar] [CrossRef] [PubMed]
- Liefferink, R.W.; Weber, B.; Coulais, C.; Bonn, D. Geometric control of sliding friction. Extreme Mech. Lett. 2021, 49, 101475. [Google Scholar] [CrossRef]
- Rafsanjani, A.; Zhang, Y.; Liu, B.; Rubinstein, S.M.; Bertoldi, K. Kirigami skins make a simple soft actuator crawl. Sci. Robot. 2018, 3, 15. [Google Scholar] [CrossRef] [PubMed]
- Marvi, H.; Cook, J.P.; Streator, J.L.; Hu, D.L. Snakes move their scales to increase friction. Biotribology 2016, 5, 52–60. [Google Scholar] [CrossRef]
- Denny, M. Locomotion: The Cost of Gastropod Crawling. Science 1980, 208, 1288–1290. [Google Scholar] [CrossRef] [PubMed]
- Ashby, M.F. The properties of foams and lattices. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2006, 364, 15–30. [Google Scholar] [CrossRef]
- Al-Ketan, O.; Lee, D.-W.; Rowshan, R.; Abu Al-Rub, R.K. Functionally graded and multi-morphology sheet TPMS lattices: Design, manufacturing, and mechanical properties. J. Mech. Behav. Biomed. Mater. 2020, 102, 103520. [Google Scholar] [CrossRef] [PubMed]
- Gao, T.; Liu, K.; Wang, X.; Wei, K.; Wang, Z. Multi-level mechanism of biomimetic TPMS hybridizations with tailorable global homogeneity and heterogeneity. Extreme Mech. Lett. 2024, 68, 102136. [Google Scholar] [CrossRef]
- Xi, H.; Zhou, Z.; Zhang, H.; Huang, S.; Xiao, H. Multi-morphology TPMS structures with multi-stage yield stress platform and multi-level energy absorption: Design, manufacturing, and mechanical properties. Eng. Struct. 2023, 294, 116733. [Google Scholar] [CrossRef]
- Fan, H.; Tian, Y.; Yang, L.; Hu, D.; Liu, P. Multistable mechanical metamaterials with highly tunable strength and energy absorption performance. Mech. Adv. Mater. Struct. 2022, 29, 1637–1649. [Google Scholar] [CrossRef]
- Rezapourian, M.; Jasiuk, I.; Saarna, M.; Hussainova, I. Selective laser melted Ti6Al4V split-P TPMS lattices for bone tissue engineering. Int. J. Mech. Sci. 2023, 251, 108353. [Google Scholar] [CrossRef]
- Rezapourian, M.; Hussainova, I. Optimal mechanical properties of Hydroxyapatite gradient Voronoi porous scaffolds for bone applications—A numerical study. J. Mech. Behav. Biomed. Mater. 2023, 148, 106232. [Google Scholar] [CrossRef]
- Al-Ketan, O.; Abu Al-Rub, R.K. Multifunctional Mechanical Metamaterials Based on Triply Periodic Minimal Surface Lattices. Adv. Eng. Mater. 2019, 21, 1900524. [Google Scholar] [CrossRef]
- Wong, T.-S.; Kang, S.H.; Tang, S.K.Y.; Smythe, E.J.; Hatton, B.D.; Grinthal, A.; Aizenberg, J. Bioinspired self-repairing slippery surfaces with pressure-stable omniphobicity. Nature 2011, 477, 443–447. [Google Scholar] [CrossRef] [PubMed]
- Broeckhoven, C.; du Plessis, A. Escaping the Labyrinth of Bioinspiration: Biodiversity as Key to Successful Product Innovation. Adv. Funct. Mater. 2022, 32, 2110235. [Google Scholar] [CrossRef]
- Gaspar, V.M.; Lavrador, P.; Borges, J.; Oliveira, M.B.; Mano, J.F. Advanced Bottom-Up Engineering of Living Architectures. Adv. Mater. 2020, 32, e1903975. [Google Scholar] [CrossRef] [PubMed]
- Perricone, V.; Santulli, C.; Rendina, F.; Langella, C. Organismal Design and Biomimetics: A Problem of Scale. Biomimetics 2021, 6, 56. [Google Scholar] [CrossRef] [PubMed]
- Cavaleri, L.; Asteris, P.G.; Psyllaki, P.P.; Douvika, M.G.; Skentou, A.D.; Vaxevanidis, N.M. Prediction of Surface Treatment Effects on the Tribological Performance of Tool Steels Using Artificial Neural Networks. Appl. Sci. 2019, 9, 2788. [Google Scholar] [CrossRef]
- Mahapatra, S.; Patnaik, A. Study on mechanical and erosion wear behavior of hybrid composites using Taguchi experimental design. Mater. Des. 2009, 30, 2791–2801. [Google Scholar] [CrossRef]
- Grützmacher, P.G.; Profito, F.J.; Rosenkranz, A. Multi-Scale Surface Texturing in Tribology—Current Knowledge and Future Perspectives. Lubricants 2019, 7, 95. [Google Scholar] [CrossRef]
- Gachot, C.; Rosenkranz, A.; Hsu, S.M.; Costa, H.L. A critical assessment of surface texturing for friction and wear improvement. Wear 2017, 372–373, 21–41. [Google Scholar] [CrossRef]
- Rosenkranz, A.; Marian, M.; Profito, F.J.; Aragon, N.; Shah, R. The Use of Artificial Intelligence in Tribology—A Perspective. Lubricants 2020, 9, 2. [Google Scholar] [CrossRef]
- Marian, M.; Tremmel, S. Current Trends and Applications of Machine Learning in Tribology—A Review. Lubricants 2021, 9, 86. [Google Scholar] [CrossRef]
- Curtarolo, S.; Setyawan, W.; Hart, G.L.; Jahnatek, M.; Chepulskii, R.V.; Taylor, R.H.; Wang, S.; Xue, J.; Yang, K.; Levy, O.; et al. AFLOW: An automatic framework for high-throughput materials discovery. Comput. Mater. Sci. 2012, 58, 218–226. [Google Scholar] [CrossRef]
- Jia, D.; Duan, H.; Zhan, S.; Jin, Y.; Cheng, B.; Li, J. Design and Development of Lubricating Material Database and Research on Performance Prediction Method of Machine Learning. Sci. Rep. 2019, 9, 20277. [Google Scholar] [CrossRef]
- Zhao, Y.; Mei, H.; Chang, P.; Chen, C.; Cheng, L.; Dassios, K.G. Infinite Approaching Superlubricity by Three-Dimensional Printed Structures. ACS Nano 2021, 15, 240–257. [Google Scholar] [CrossRef] [PubMed]
- Zafar, M.Q.; Zhao, H. 4D Printing: Future Insight in Additive Manufacturing. Met. Mater. Int. 2019, 26, 564–585. [Google Scholar] [CrossRef]
- Gharde, S.; Surendren, A.; Korde, J.M.; Saini, S.; Deoray, N.; Goud, R.; Nimje, S.; Kandasubramanian, B. Recent advances in additive manufacturing of bio-inspired materials. Biomanufacturing 2019, 35–68. [Google Scholar] [CrossRef]
- Liu, J.; Wang, X.; Liu, Y.; Liu, X.; Fan, K. Bioinspired three-dimensional and multiple adsorption effects toward high lubricity of solvent-free graphene-based nanofluid. Carbon 2022, 188, 166–176. [Google Scholar] [CrossRef]
- Zhu, Y.; Yang, F.; Guo, Z. Bioinspired surfaces with special micro-structures and wettability for drag reduction: Which surface design will be a better choice? Nanoscale 2021, 13, 3463–3482. [Google Scholar] [CrossRef] [PubMed]



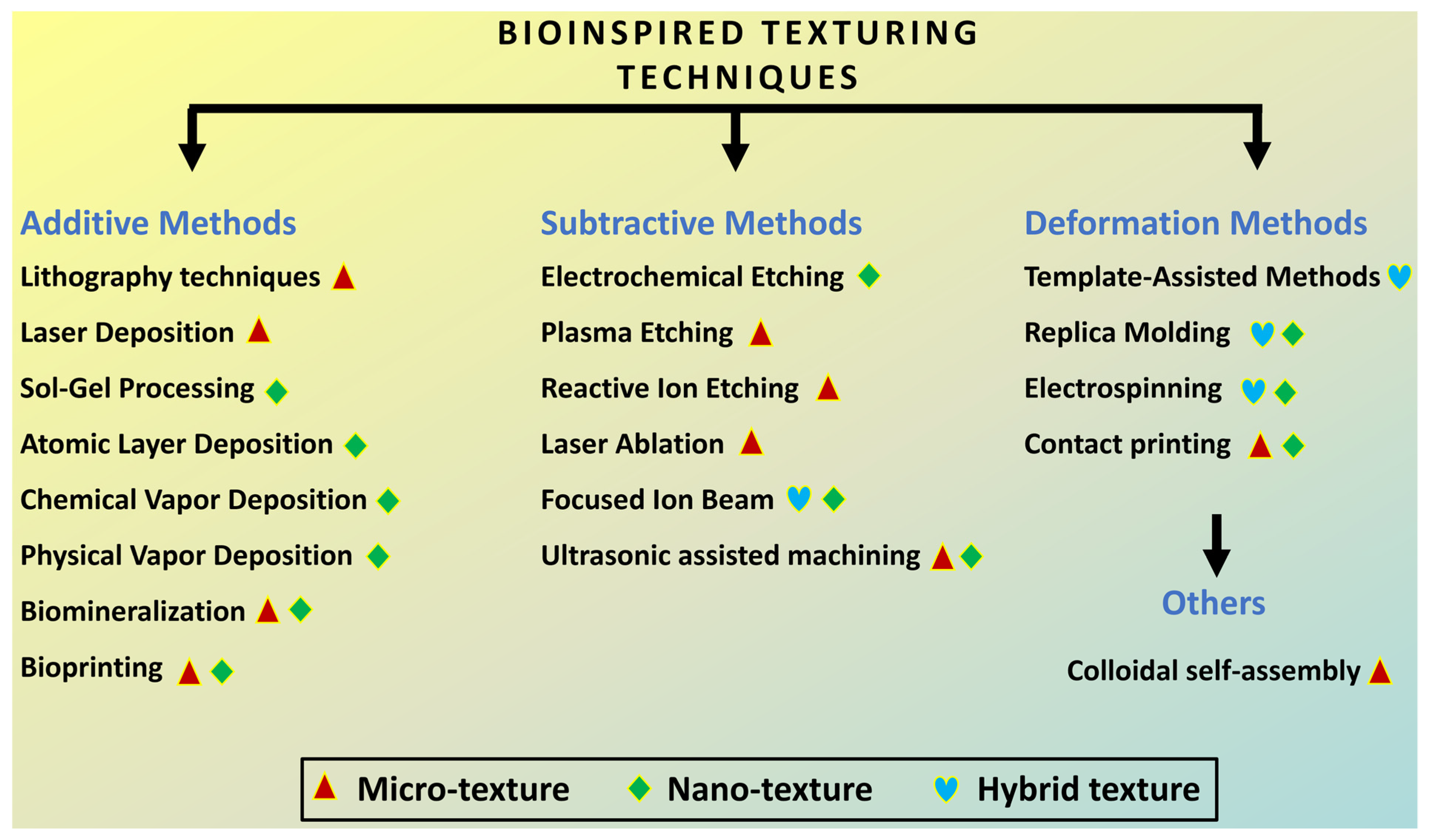

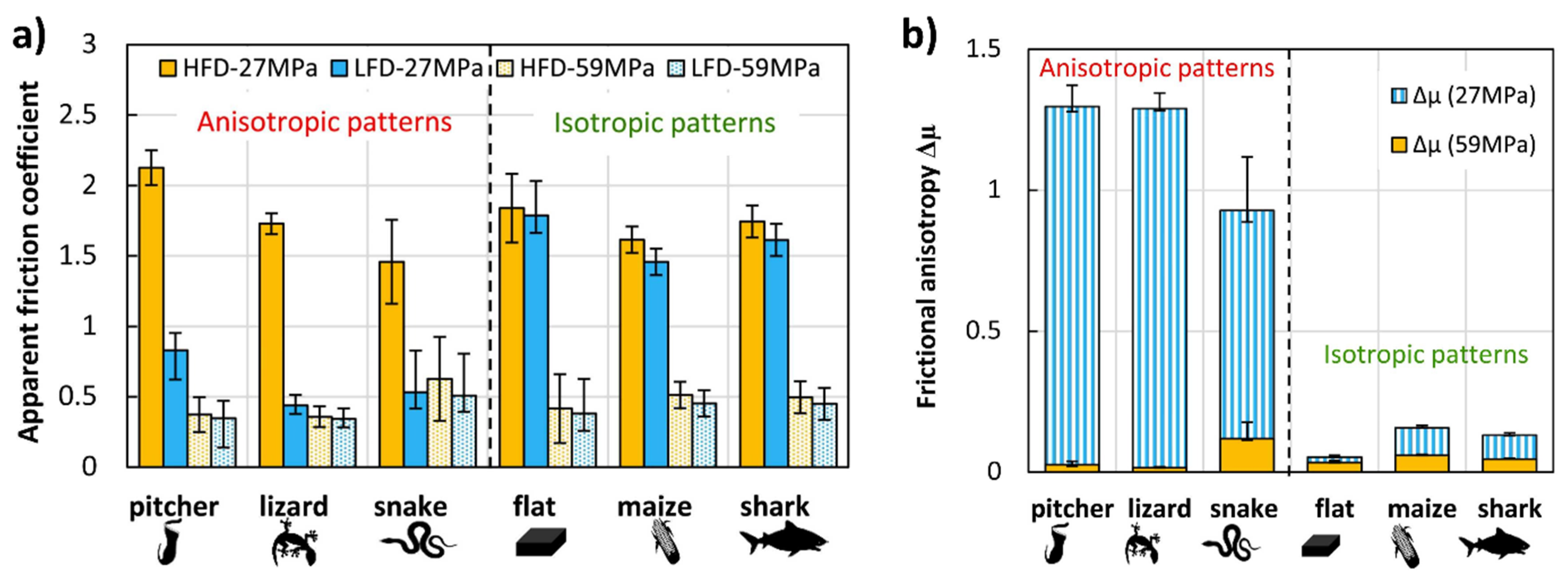

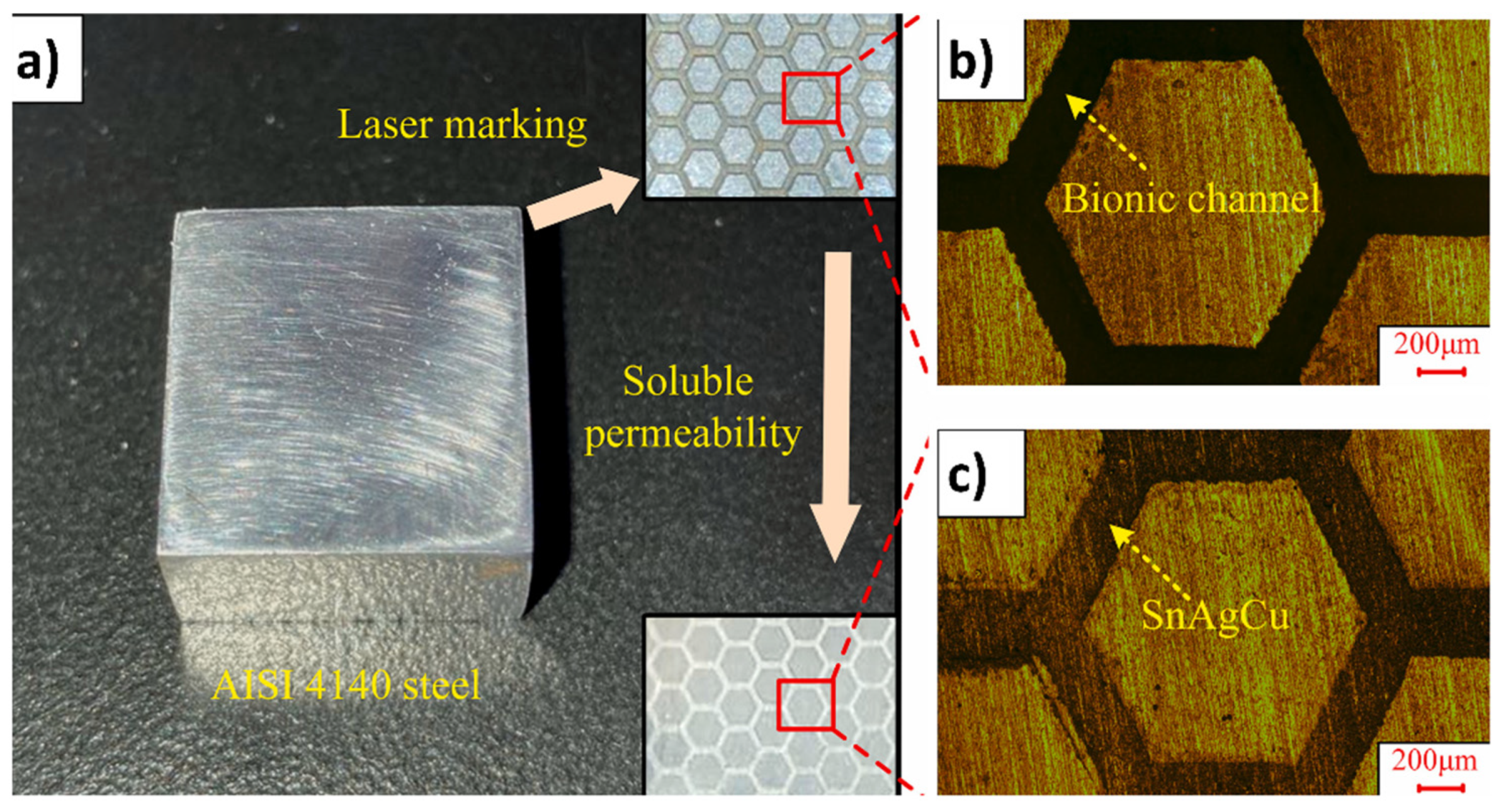
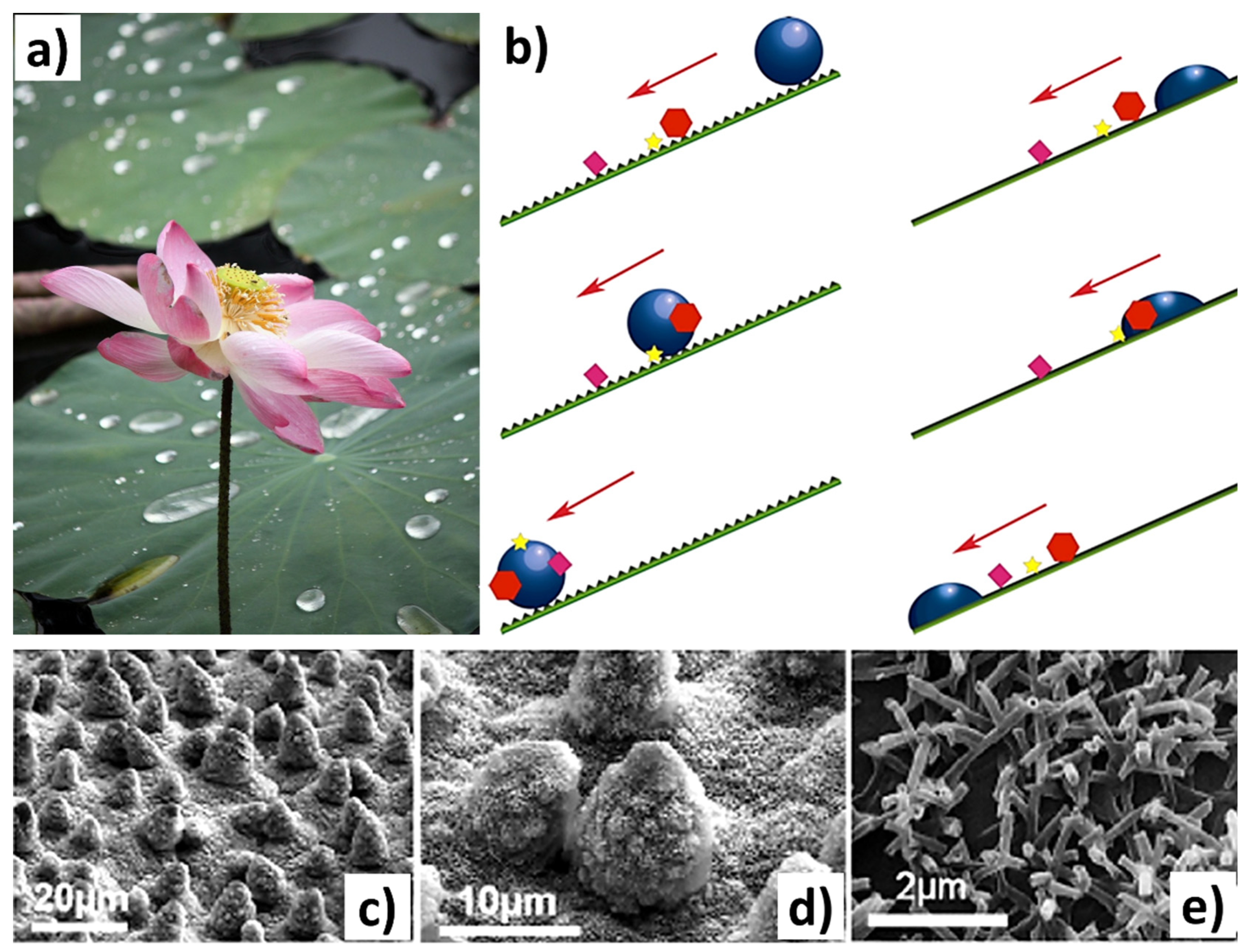

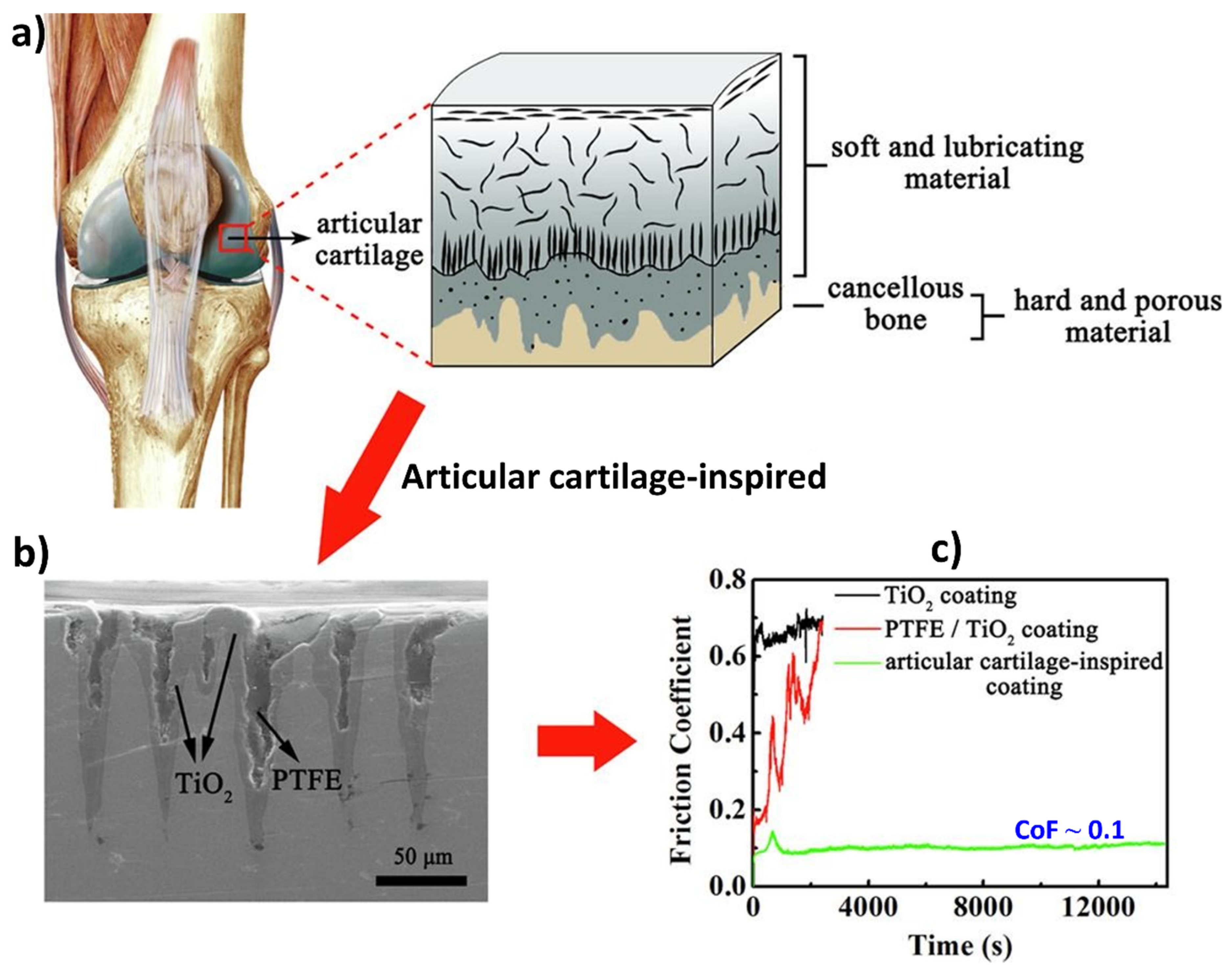
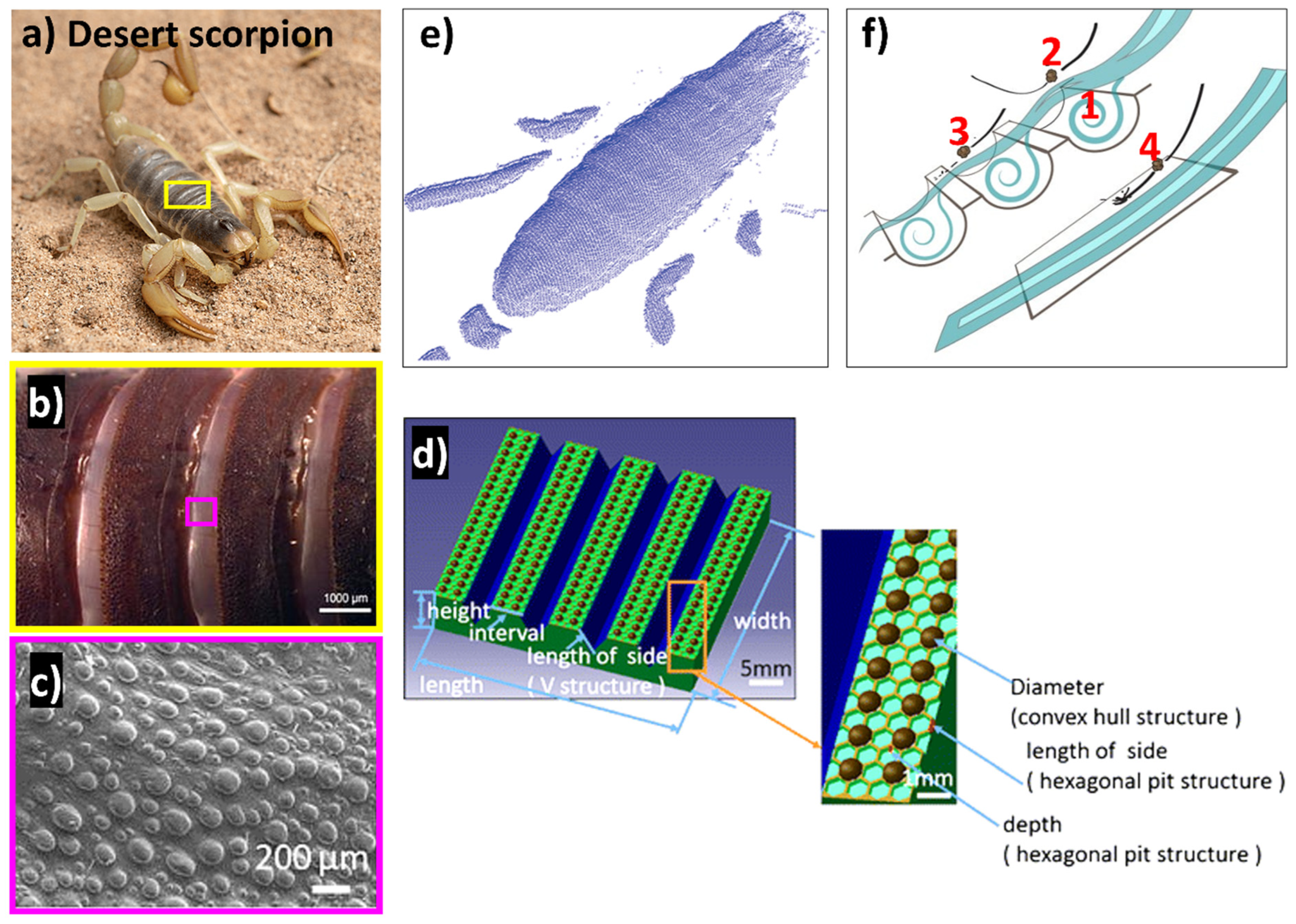
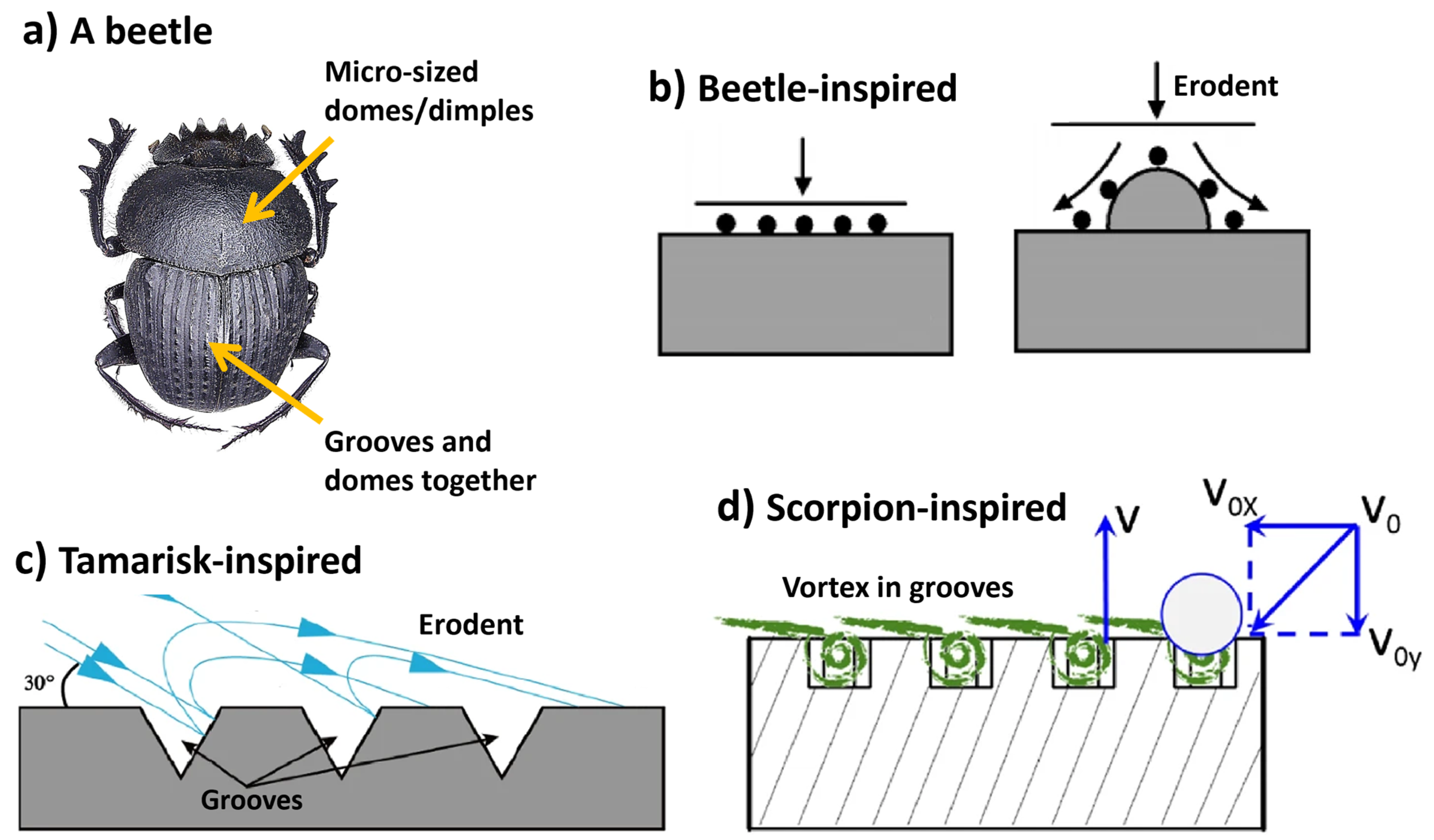


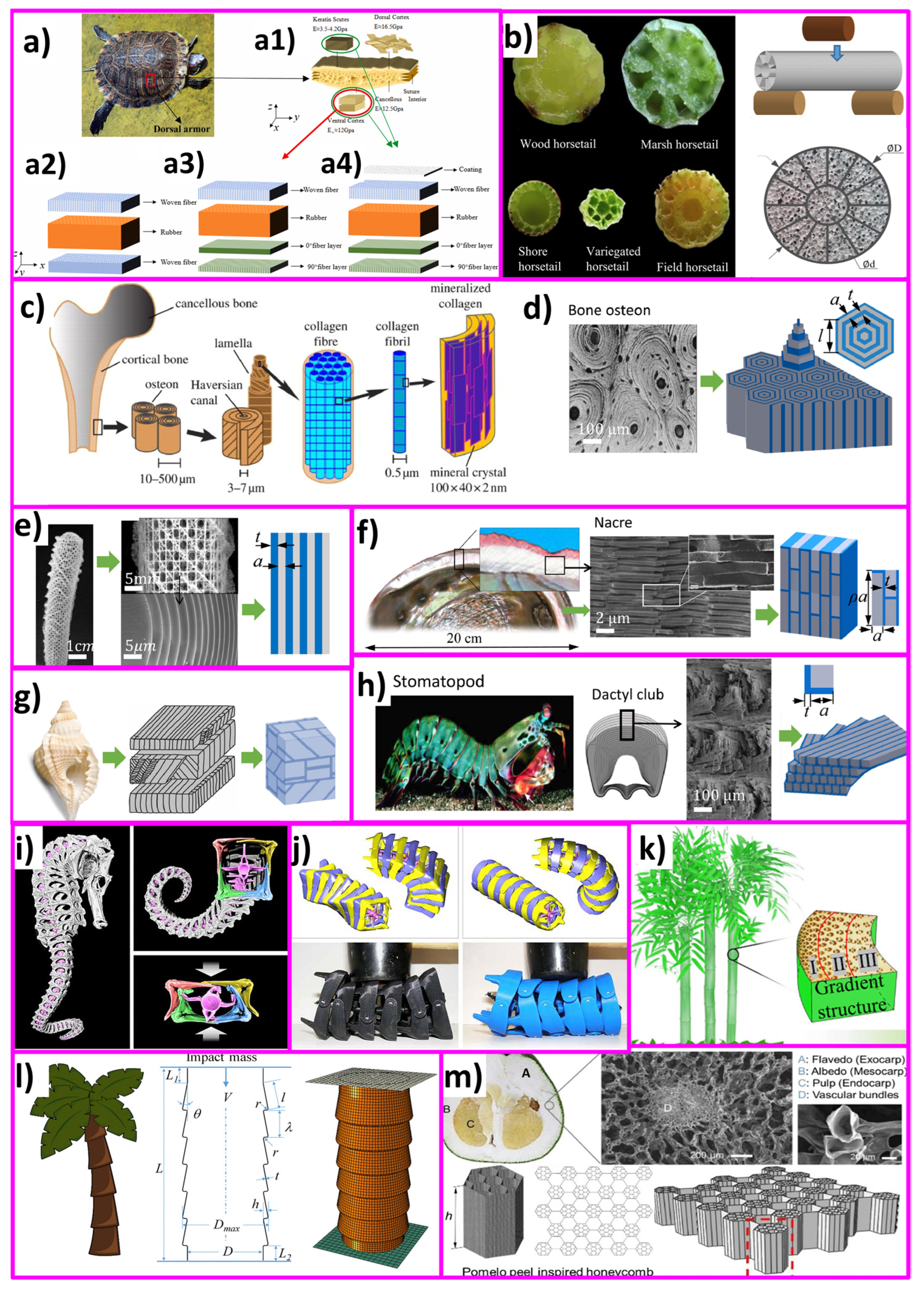
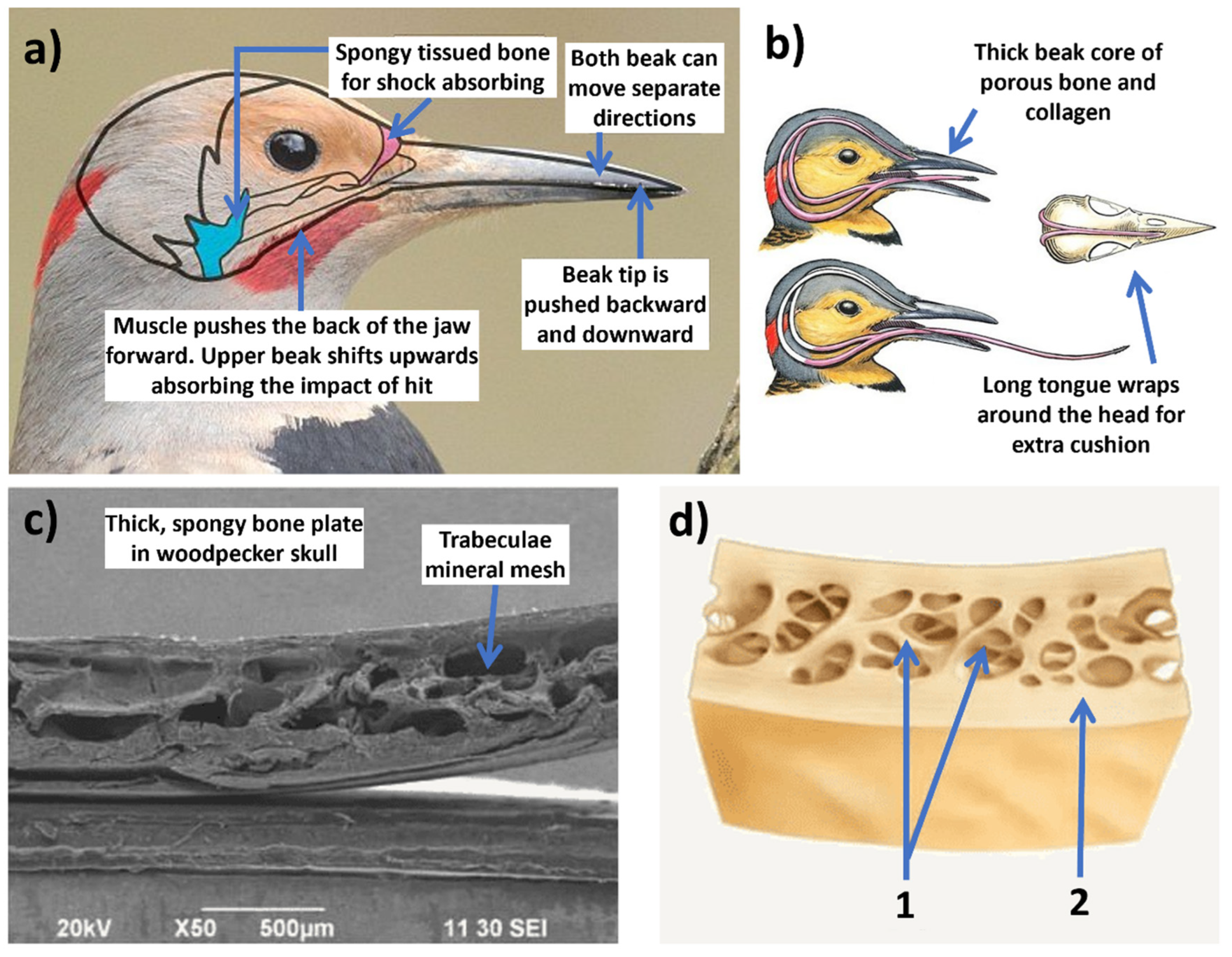

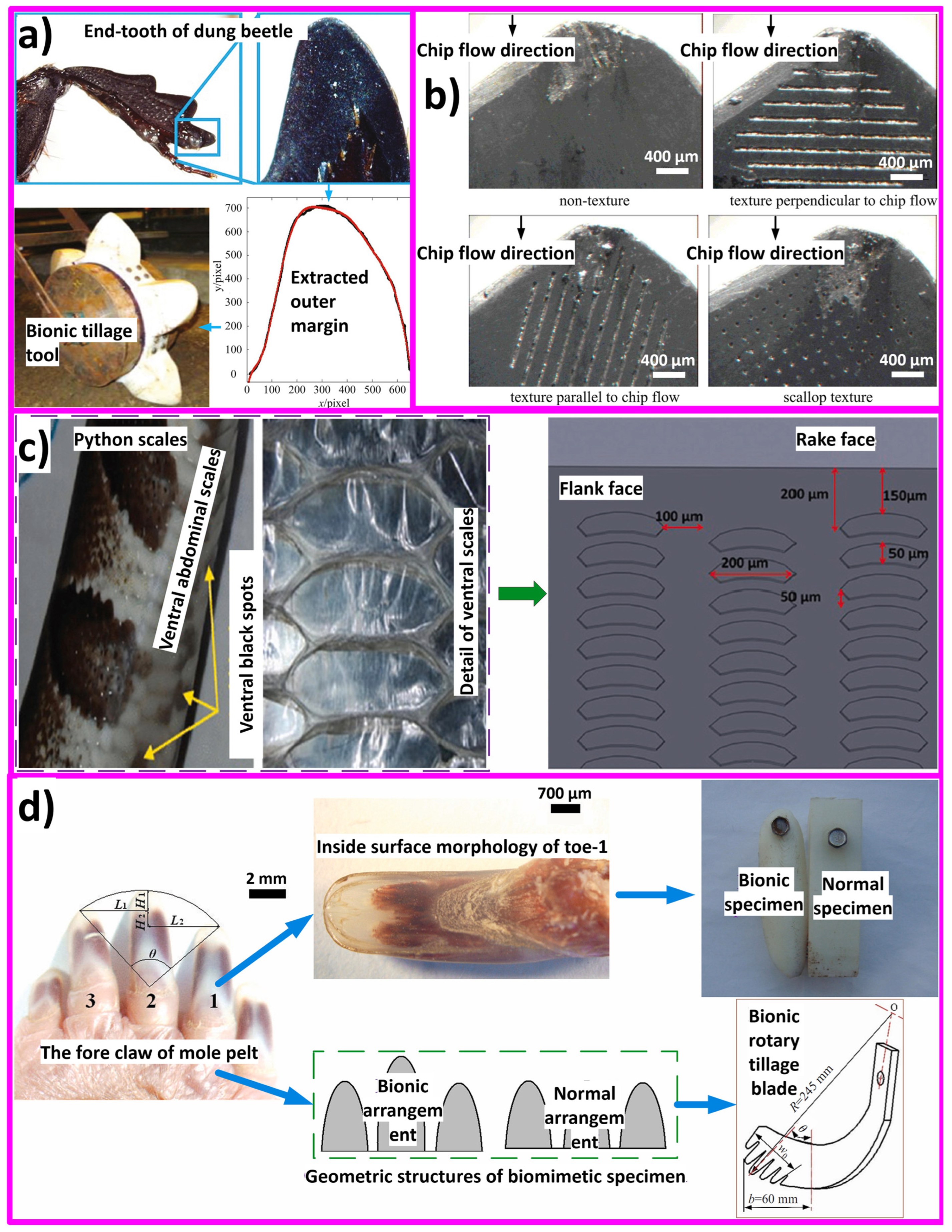
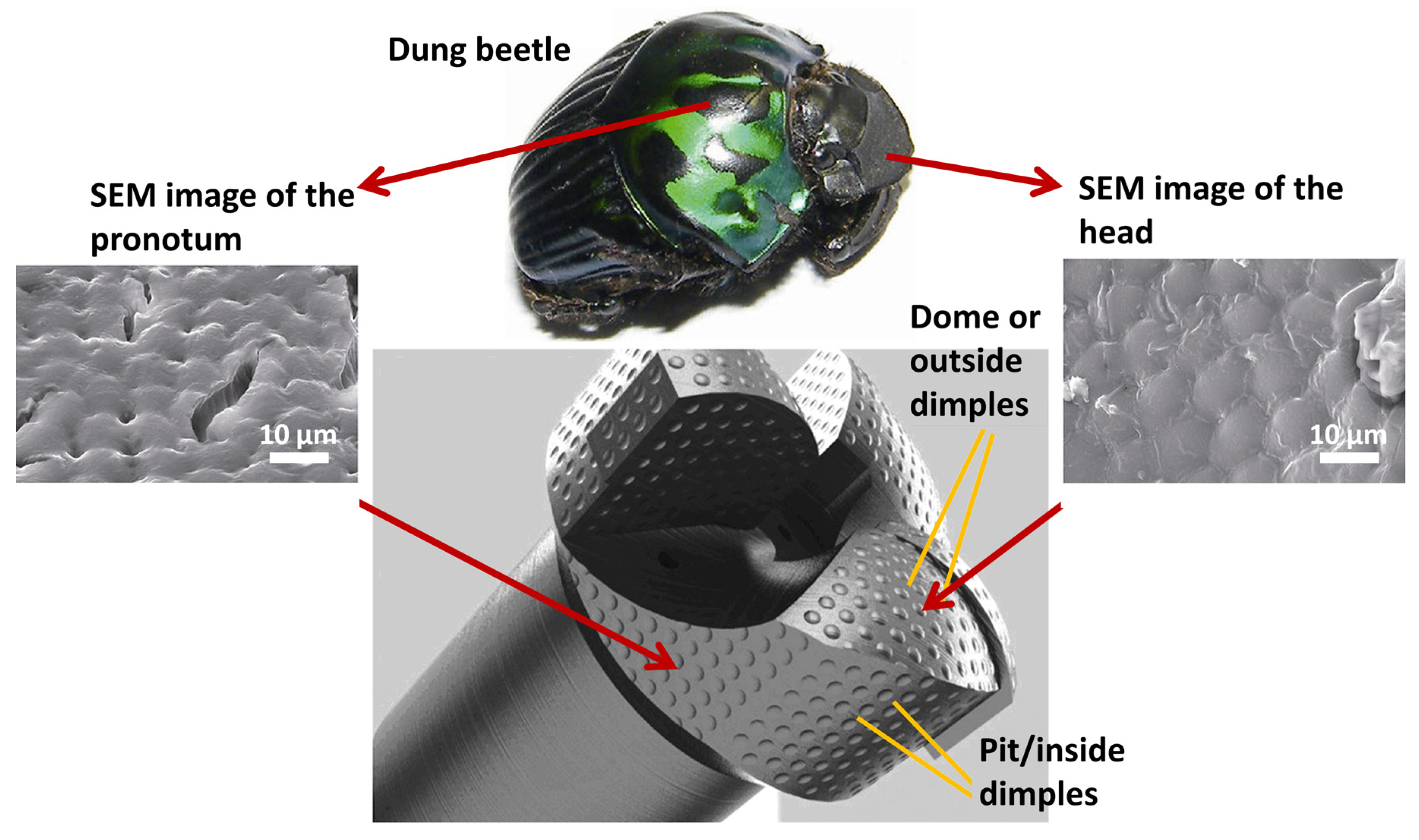
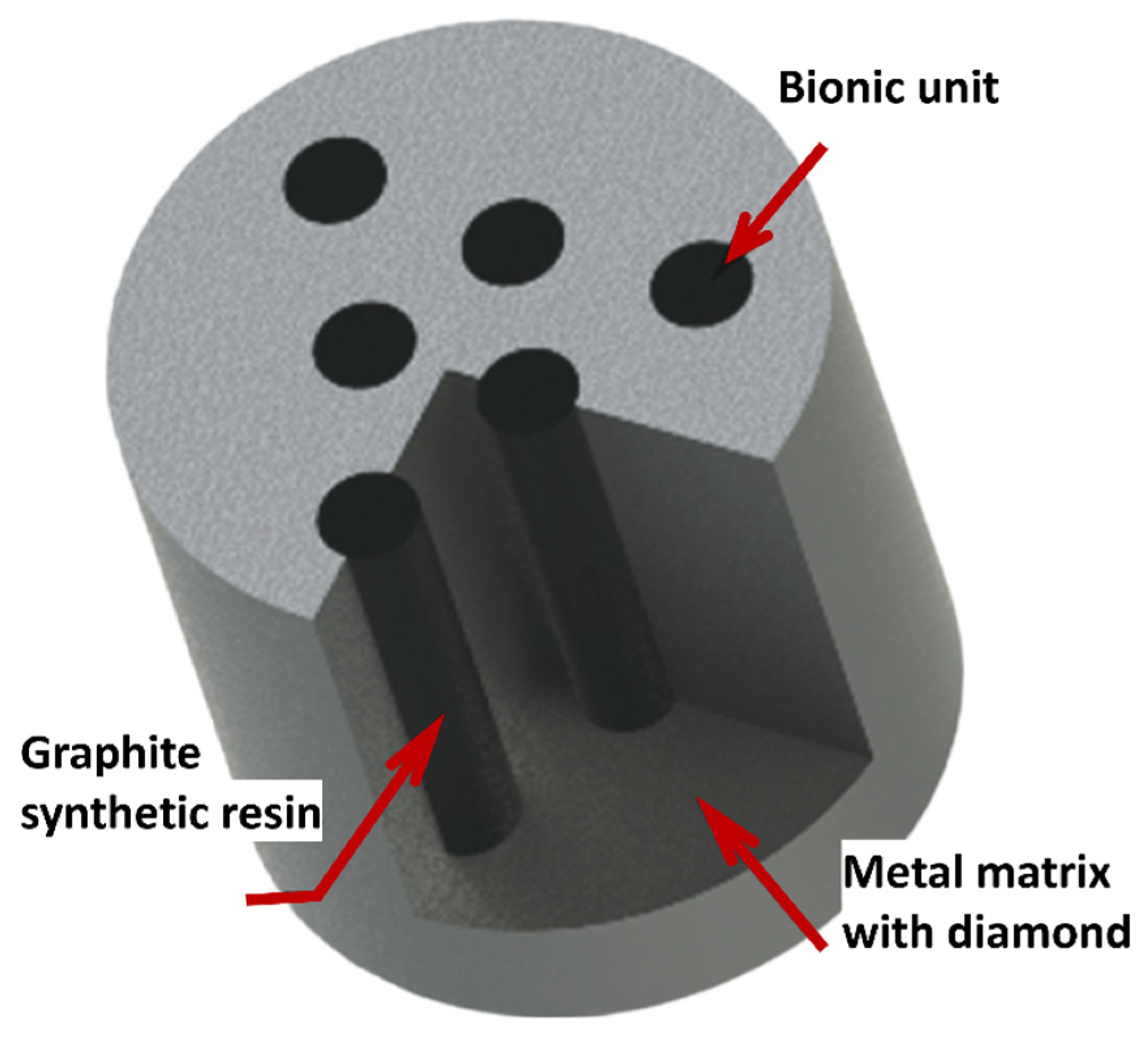

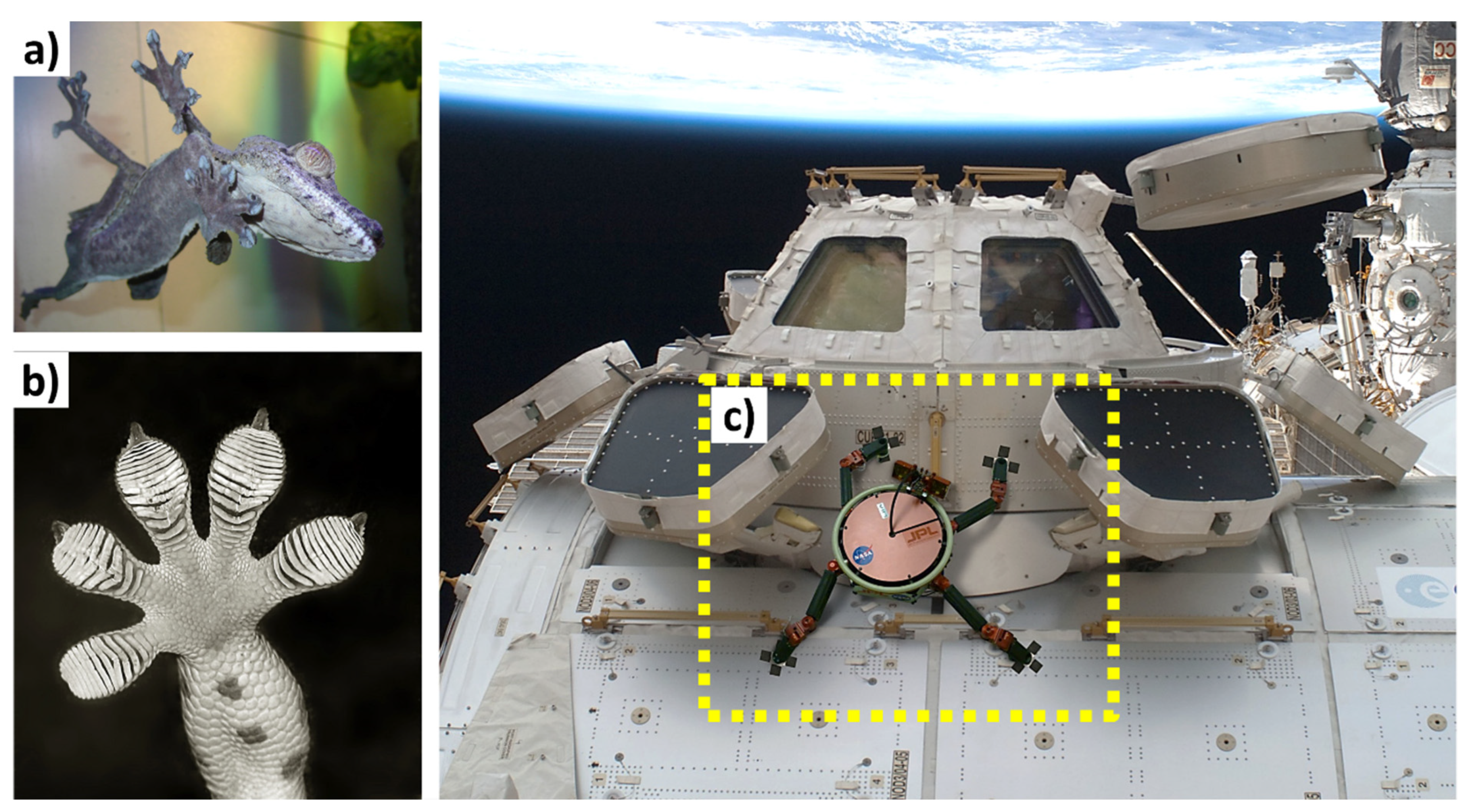
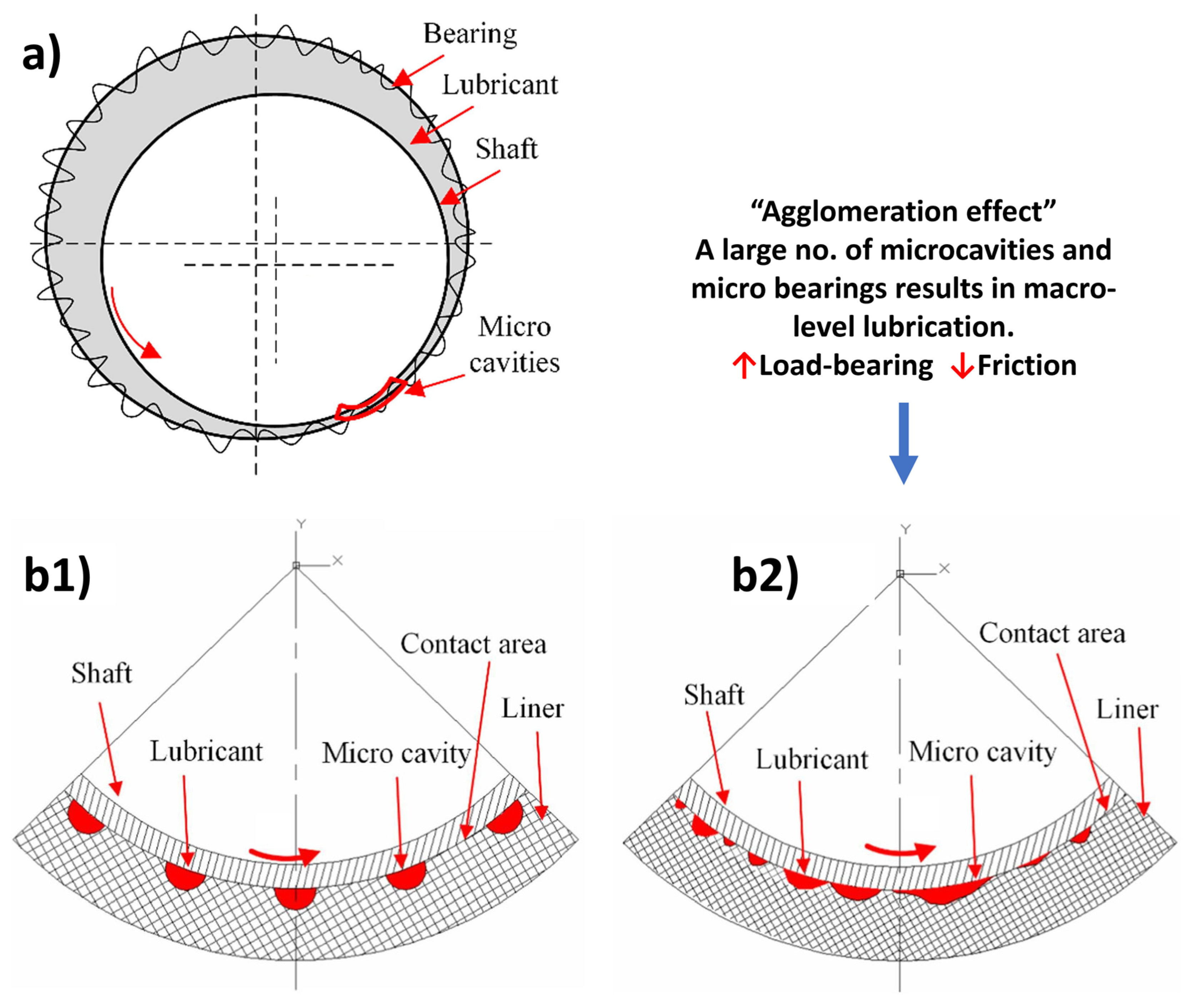
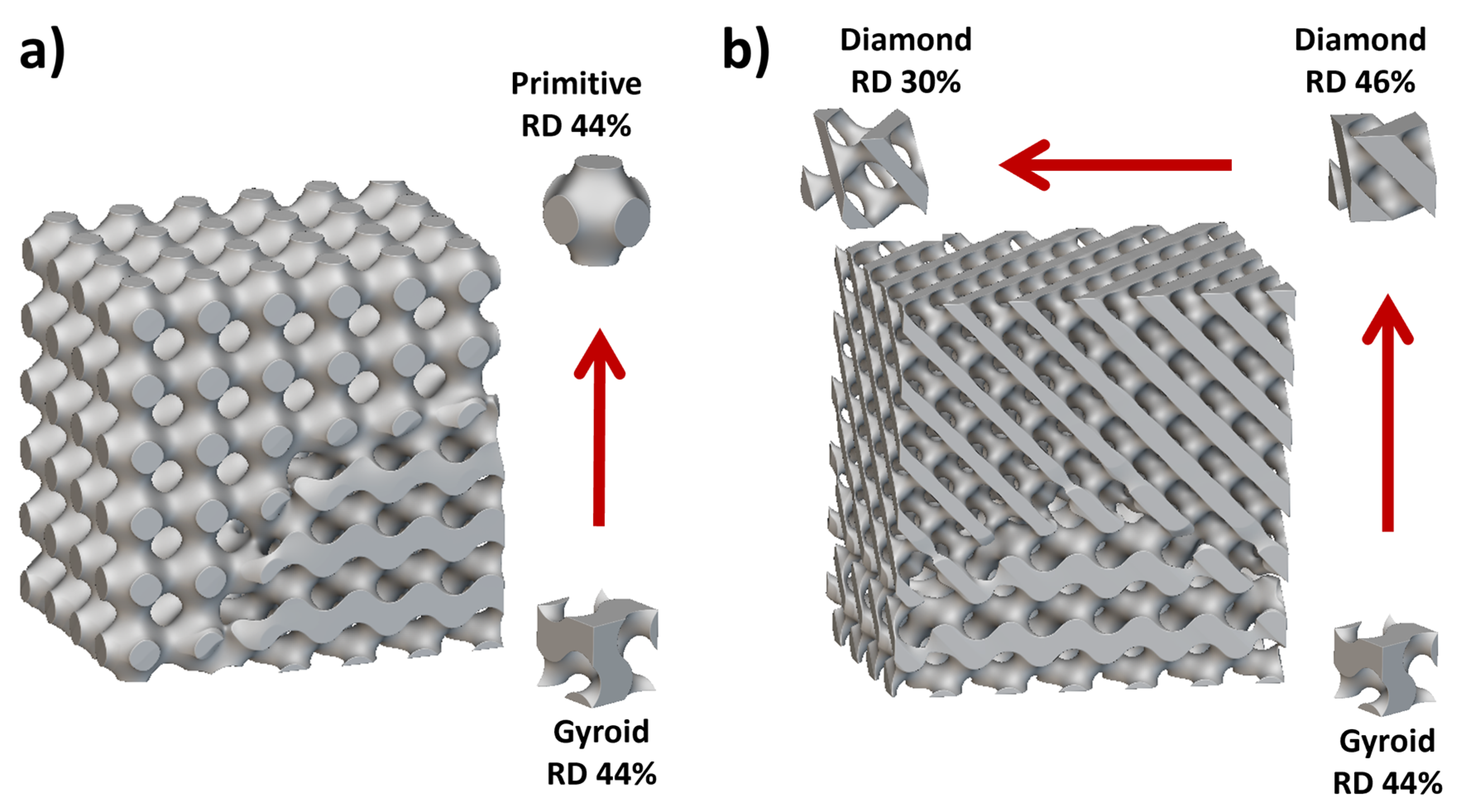

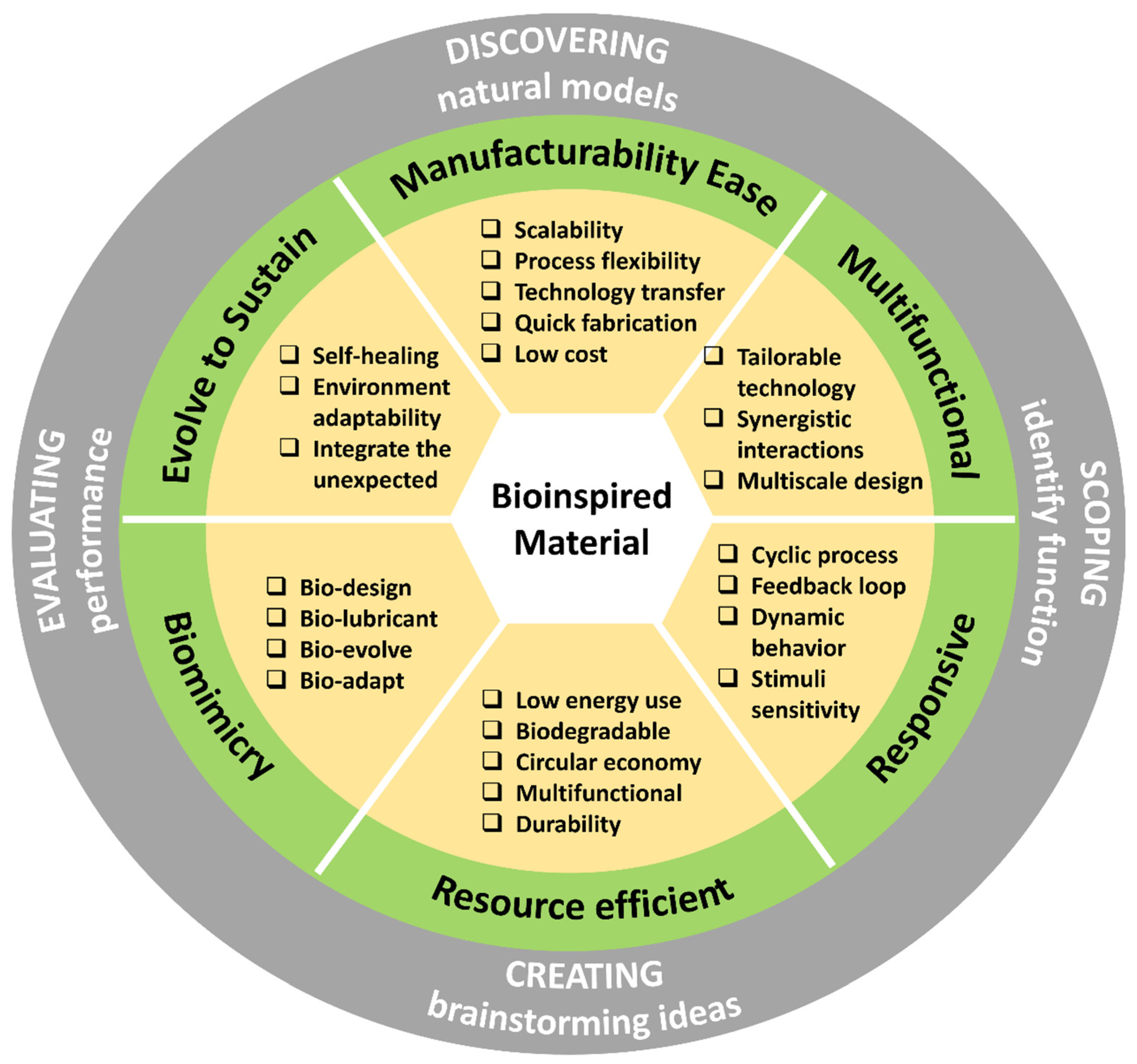
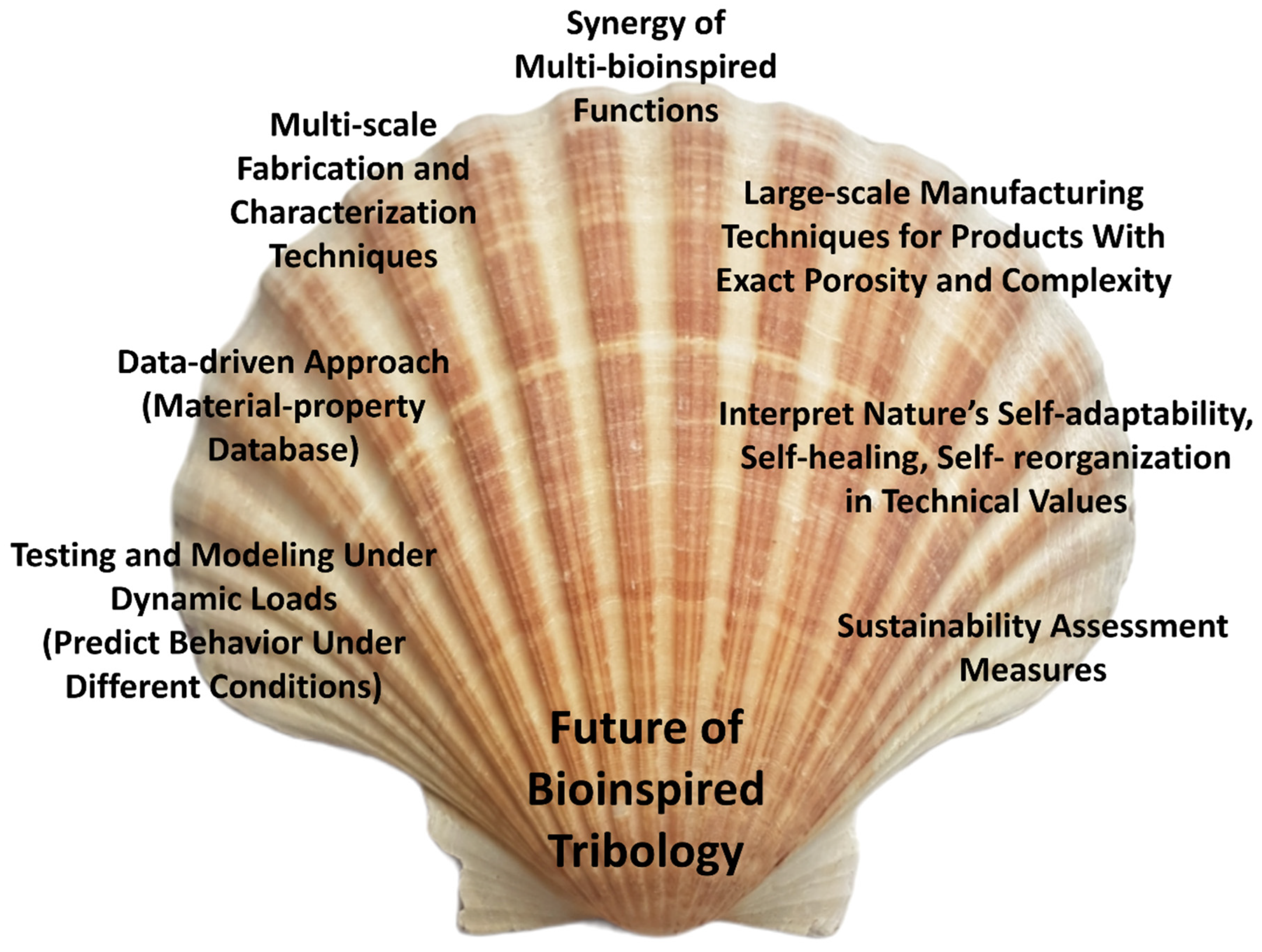

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
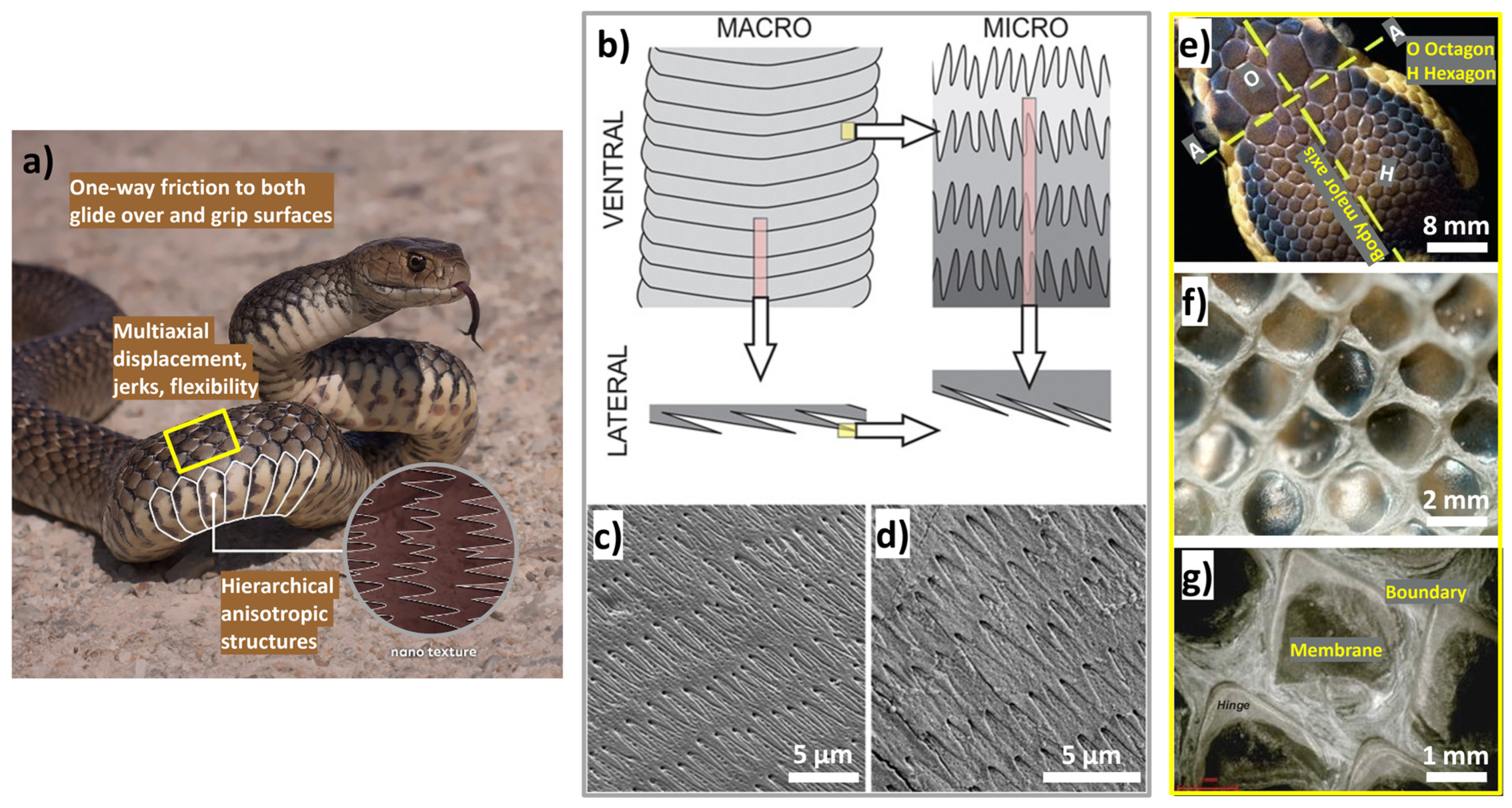{kind=link}
{kind=link}
{kind=link}
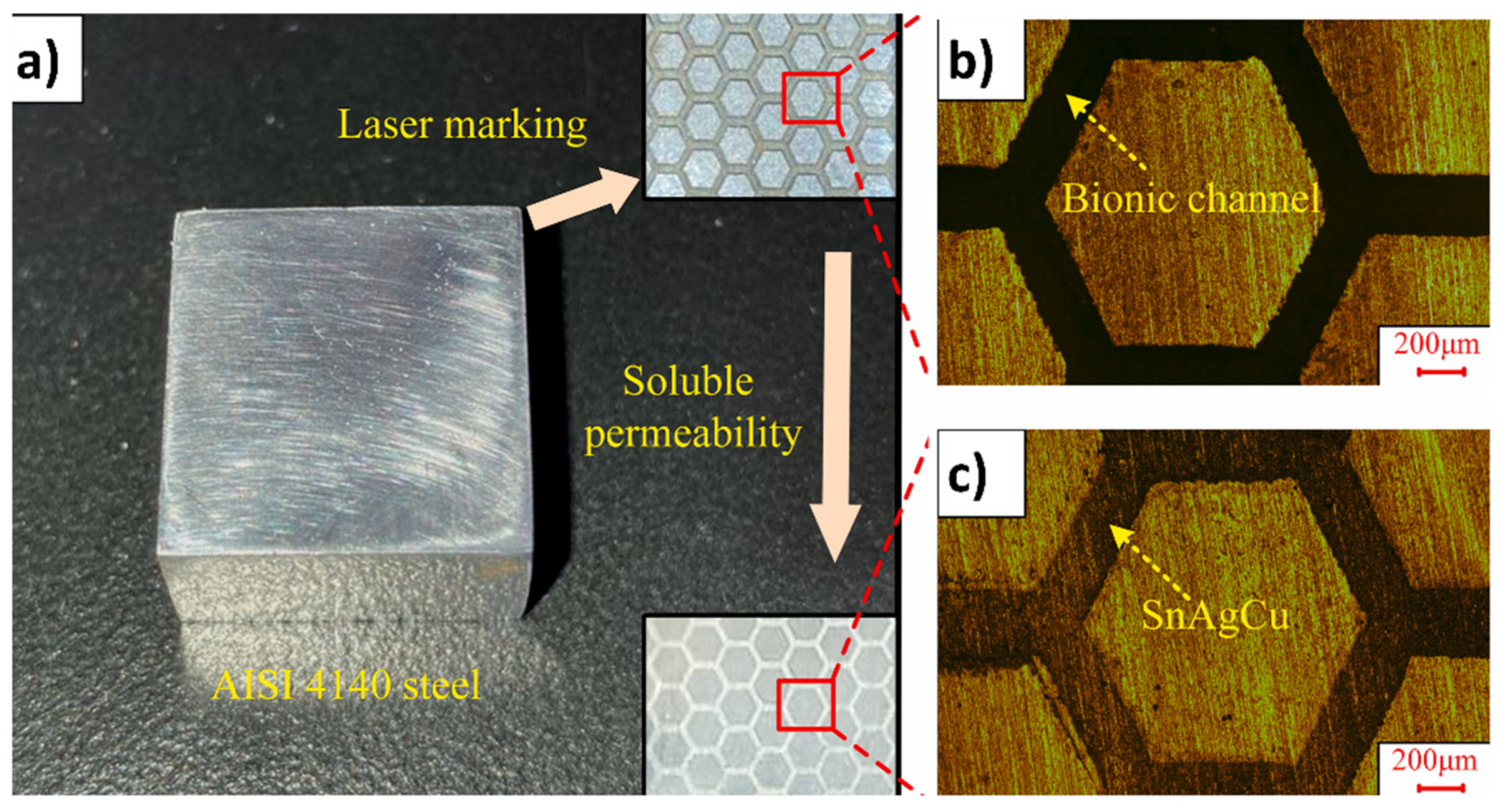{kind=link}
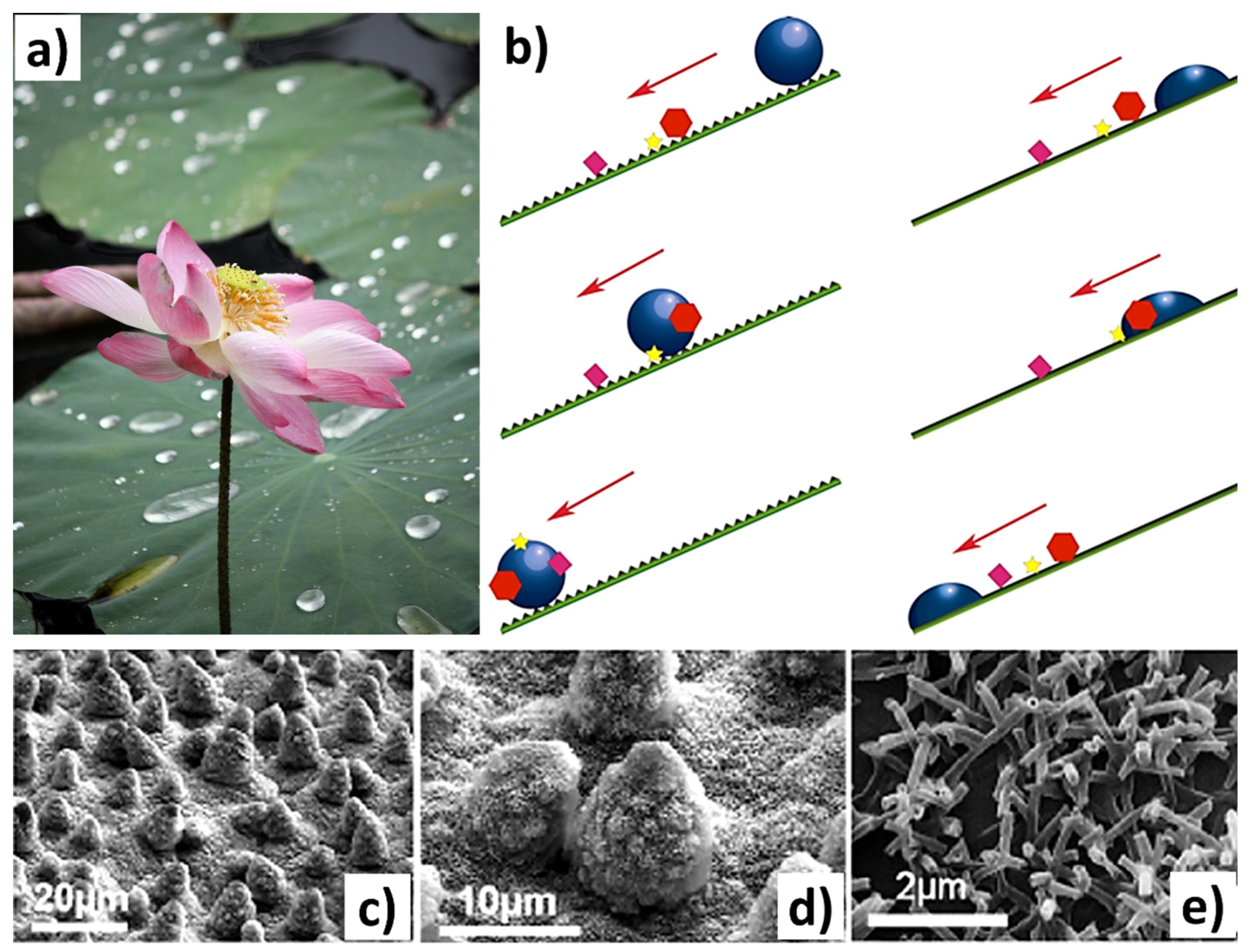{kind=link}
{kind=link}
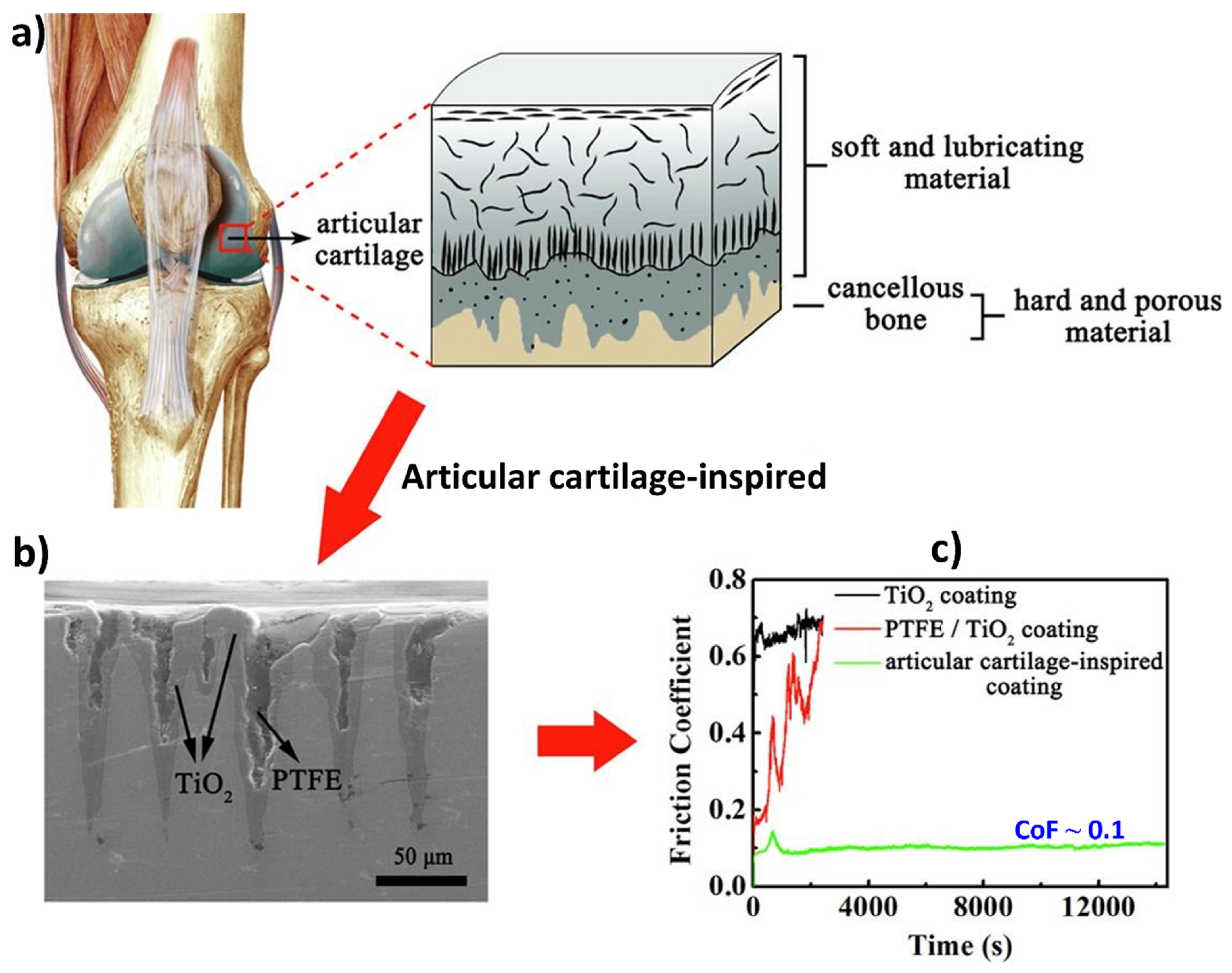{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
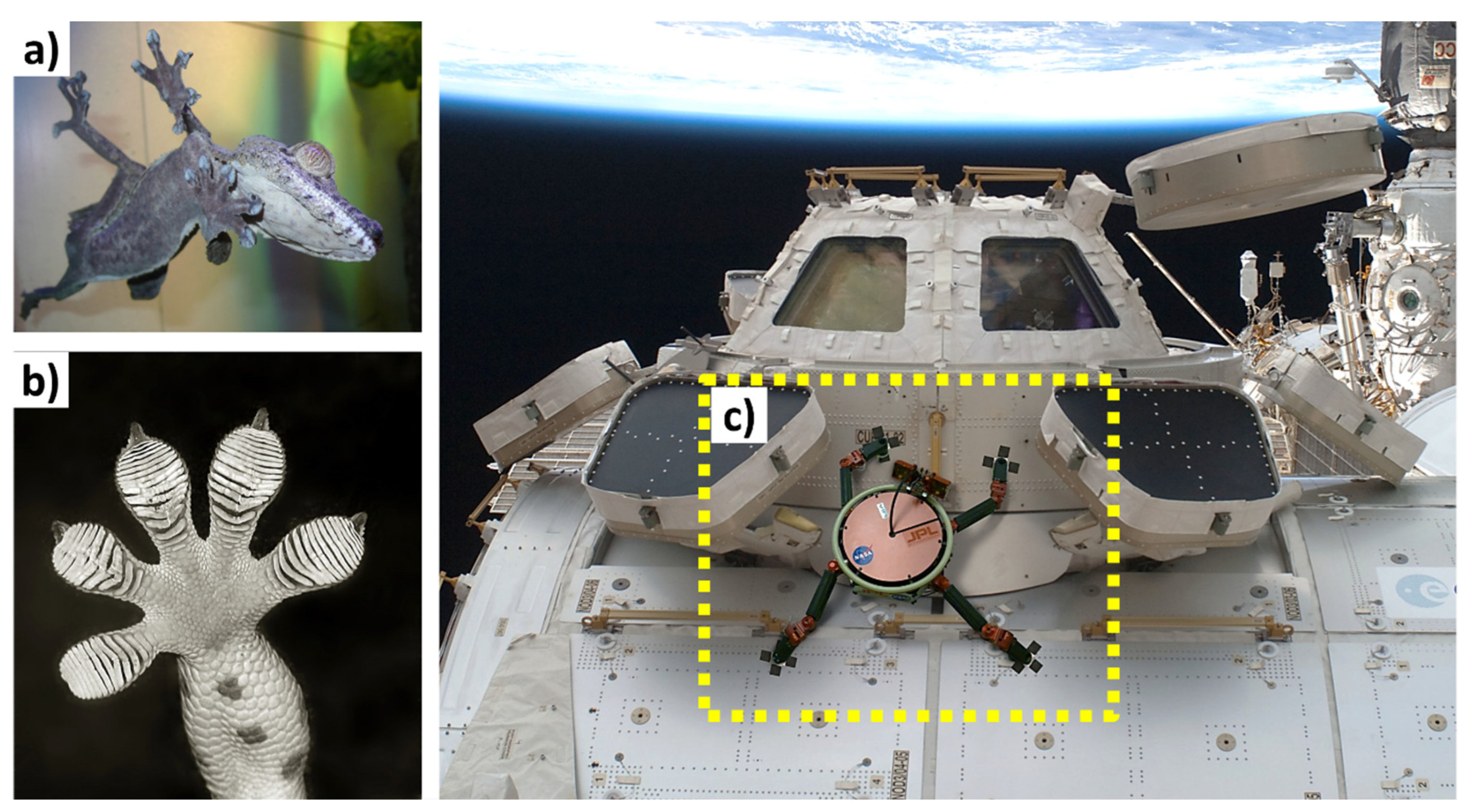{kind=link}
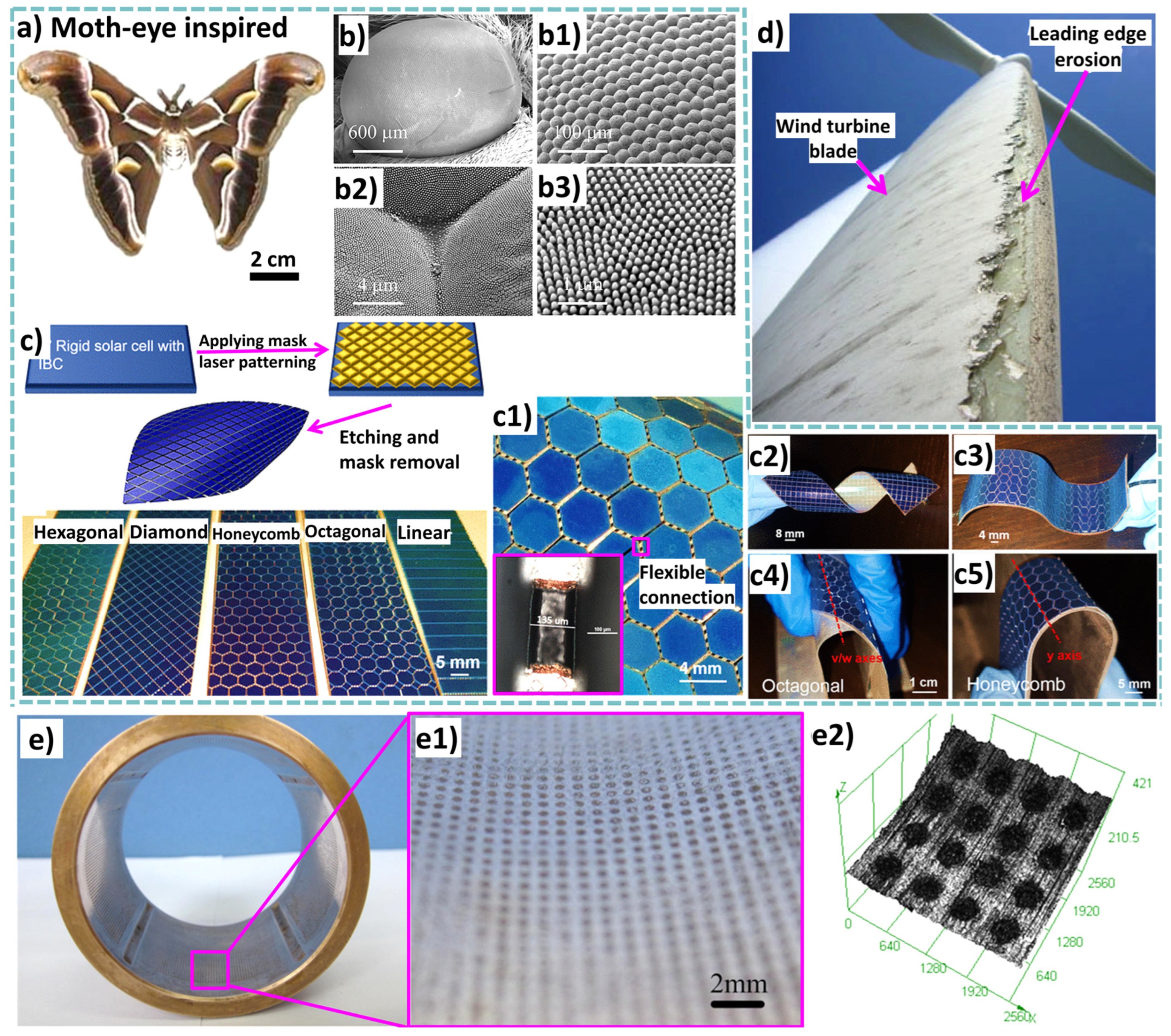{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Applications | Key Functionality Required | Key Tribological Modes |
|---|---|---|
| Wind turbines and propellers | Anti-icing, Antifouling, Self-cleaning, Erosive resistance, Lightweight, Drag-resistance, Hydrophobicity | Sliding and Leading-edge erosion |
| Bearings, seals, actuators, gears, and shafts | Flexibility, Compactness, Self-lubrication, Adaptive response, Load carrying capability, Environmental adaptation, Vibration damping, Noise reduction, Friction reduction, Hydrophobicity | Sliding |
| Rail tracks, wheels, and braking systems | Self-healing smart materials, Self-adaptive wheels, and brakes (friction) to changing loads, speed, etc., Energy harvesting from vibration damping, Self-cleaning, Wear resistance | Sliding, Rolling |
| Piston rings, cylinder liners, camshafts | Self-lubrication, Adaptive response, Wear resistance, Heat dissipation, Friction reduction, Self-cleaning, Vibration damping, Noise reduction | Sliding |
| Cutting tools in machining, drill bits | Self-sharpening, Wear resistance, Heat dissipation, Anti-adhesion chip control, Lubrication enhancement, Adaptive control, Hydrophobicity | Sliding, Impact, Abrasion, Erosion |
| Prosthetic joints, dental implants, and surgical instruments | Biocompatibility, Antibacterial, Osseointegration, Flexibility and Range of Motion, Self-lubrication, Load carrying capability, Surgical precision, Responsive material to adapt tissue changes | Sliding, Impact, Tribocorrosion, Quasistatic compression |
| Ship hulls, hydrofoils, and swimsuits | Drag resistance, Antifouling, Hydrophobicity, Flexibility and maneuverability, Hydrophobicity, Air-filled cavities, or flexible fins for buoyancy | Hydro-drag, Erosion, Corrosion |
| Spatial satellites | Erosion and impact resistance from space debris, Adaptive or morphing structures, Energy harvesting solar panels, Radiation resistance, Bioinspired locomotion | Erosion, Impact |
| Material handling equipment (crushers, screens, conveyor systems, hoppers, chutes, etc.) | Erosion and impact resistance, Efficient material flow patterns, Abrasion resistance, Self-cleaning of debris or material build-up, Flexible components for easy throughput of feedstocks | Abrasion, Erosion, Impact |
| Pumps (impellers, casing, suction/discharge nozzles, etc.) and pipelines | Drag reduction, Self-cleaning, Improved fluid handling, Antifouling, Anti-corrosion | Abrasion, Erosion, Corrosion, Cavitation |
| Hydro turbines and boilers | Adaptive blade design, Efficient heat transfer, Drag reduction, Cavitation resistance | Slurry erosion |
| Plows, tillage tools | Self-sharpening, Self-cleaning, Hydrophobicity, Efficient soil penetration, and tillage | Erosion, Abrasion, Impact |
| Ski edges, snowboards, and bicycle chains | Hydrophobicity, Anti-icing, Reduced friction, Enhanced grip adhesion, Resilience, Shock absorption, Lightweight | Abrasion, Sliding |
| Solar panels | Self-cleaning, Erosion resistance, Flexibility, Enhanced light harvesting surface | Solid particle erosion |
| Airframe structures | Lightweight, High strength, Flexibility, Natural sound-damping (owl wings-inspired), Vibration stability and maneuverability, Drag reduction | Air drag/friction, Trailing edge erosion |
| Cricket bats, golf clubs, and hockey sticks | Lightweight, Shock absorption, High strength, Resilience, Drag reduction | Impact, Air drag |
| Automotive body, crash barriers on highways, and military armor | Energy absorption, Impact resistance, Flexibility for movement, Adaptive camouflage | Impact |
| Bulldozers, hydraulic hammers, and excavator teeth | Impact resistance, Self-sharpening edges, Material anti-adhesion, Erosion resistance, Abrasion-resistant, Hydrophobicity | Impact, Abrasion, Erosion |
| Bone implants for hip, knee, skull, etc. | Energy absorption, Lightweight, Porous, High strength, Adaptive lubrication, Antibacterial, Cell attachment | Sliding, Impact, Quasistatic, and dynamic compression |
| Robotic grippers, Microbots, bio-MEMS/NEMS | Adaptive adhesion, Variable stiffness, Biocompatibility, Friction anisotropy, Antibacterial | Sliding, Frictional grip |
| Bioinspired Texture and Material | Sliding Test Parameters | Friction Coefficient (CoF) | Conclusions/Texture Effect |
|---|---|---|---|
| Snake/Lizard scales-inspired (100Cr6) by laser texturing [124,126] | Velocity: 0.02–0.17 m/s Load: 2 N Pin-on-disc Counterbody: 100Cr6 | ~0.3 dry ~0.01 lubricated | 50% low CoF in dry condition. 80% low CoF in lubricated condition for faster sliding speeds, i.e., >70 mm/s. |
| Velocity: 0.02–0.17 m/s Load: 2 N Pin-on-disc Counterbody: PEEK | ~0.12–0.18 dry ~0.1 lubricated | 30–50% low CoF in dry condition. 40% low CoF in lubricated condition. | |
| Velocity: 0.02–0.17 m/s Load: 2 N Pin-on-disc Counterbody: Alumina | ~0.6–0.9 dry ~0.05 lubricated | Reduction in friction strongly depends on the sliding speed. Low CoF (20%) at slow speed in dry condition. Low CoF (70%) at faster speed in lubricated condition. | |
| Dung beetle-inspired multi-hierarchical micro/nanotextures (AISI 440C steel) by Laser ablation and coating technology [143] | Test: 15 min Load: 0.5, 1, 2, 4 N Hertzian contact pressure: 378–756 MPa Frequency: 3, 6, 9, 12 Hz Stroke: 0.004 m Ball-on-disc Counterbody: Steel ball Lubricant: Water | Decrease in CoF (~0.25) with increase in load or frequency for both single- and multi-bioinspired textures due to generation of high hydrodynamic pressure. | Possibility of developing superhydrophobic micro/nanostructures. Role of superhydrophobic in enhancing wear resistance. More than 50% wear rate reduction using multi-bioinspired textures than single-bioinspired. |
| Snake scales-inspired (AISI 52100) by Photochemical machining process [110,125] | Velocity: 1 m/s Load: 10 N Pin-on-disc Counterbody: AISI H13 tool steel pin | CoF Reduction of 37.5% was obtained for sliding parallel to lengthwise scales direction. | Anisotropic friction behavior observed as a function of the sliding direction. Friction depends on aspect ratio (scales) and percentage of texturized area on the surface. |
| Snake scales-inspired (Silicon/Epoxy) by Direct moulding [136] | Velocity: 0.002 m/s Load: 0.5–3.92 N Disc-on-disc Counterbody: Same as samples | ~0.1–0.3 dry | Complex friction behavior may lead to the possibility of inversion of friction anisotropy depending on the materials’ stiffnesses, the aspect ratios of the structural features, and substrate roughness. |
| Fish scale-inspired(MXene Ti3C2Tx based fabric composites) by Impregnation and drying [146] | Velocity: 0.7–1 m/s Load: 25–40 MPa Pin-on-disc Counterbody: AISI-1045 steel pin | ~0.04 dry | 77% lower wear rate compared to pure fabric composite. 38% lower CoF compared to pure fabric composite. CoF and Wear rate increase with increasing sliding speed. Fish scale-like structure strengthens the mechanical interlocking and chemical bonding between matrix and MXenes. |
| Fish scale-inspired (Mold steel) by 3D Printing [147] | Velocity: 0.084–0.134 m/s Load: 5–25 N Pin-on-disc Counterbody: Bronze pin (HRC 45) Lubrication: Pharmaceutical white oil | ~0.10–0.18 lubricated, tilt 45° | Tilt 45° resulted in the lowest CoF value. Squeezing out of lubricant observed. CoF decreases with the increase in sliding velocity. CoF decreases with the increase in textures number. CoF increases with the increase in sliding load. |
| Ocellated Skink Scale-inspired (polydimethylsiloxane) by 3D Printing [148] | Velocity: 0.002 m/s Load: 0.02, 0.05, 1 N Stroke: 0.004 m Ball-on-disc Counterbody: Chrome steel ball | ~1.04 for 0.2 N, dry ~0.93 for 0.2 N, dry ~1.04 for 1 N, dry | For the sliding loads 2 and 0.5 N tests, the CoF reduced by 30% and 26%, respectively. Average wear tracks widths were reduced with 61%, 48%, and 44% reduction under 0.2 N, 0.5 N, and 1 N loading conditions, respectively. |
| Pangolin scale-inspired (obtained from real animal) mounted on steel block [149] | Velocity: 0.42 and 0.84 m/s Load: 30–90 N Distance: 252 m Block-on-ring Counterbody: 0.04 m gray iron ring | ~0.22–0.42 for 0.84 m/s dry ~0.28–0.49 for 0.42 m/s dry | The wear rate at higher velocity was larger than that at the lowest velocity. Transfer film at 0.84 m·s−1 velocity was enlarged a little as compared with that at 0.42 m·s−1 velocity. High loads led to lower CoF. |
| Lotus leaf-inspired nano pillars coated with PMMA (silicon wafers/PMMA) by Soft lithography [101] | Velocity: 2 μm/s, 0.001 m/s Load: 0–80 nN, Time: 15 min Ball-on-flat Counterbody: 1.25 μm Borosilicate ball | ~0.025 untextured, dry ~0.01 textured, dry | Patterns show superior adhesion and friction behavior due to their hydrophobic nature and reduced contact area. Patterns show lower CoF than PMMA thin film owing to reduced contact area. |
| Lotus leaf-inspired micropillars coated with PMMA (silicon wafers/PMMA) by Soft lithography [101] | Velocity: 0.001 m/s Load: 0.003 N, Time: 15 min Ball-on-flat Counterbody: 1.25 μm Borosilicate ball | ~0.65 untextured, dry ~0.2 textured, dry | Patterns show lower CoF than PMMA thin film owing to reduced contact area. |
| Lotus leaf-inspired circular and bi-triangular microdimples by 7 and 20% density (100Cr6) by Lasers [128] | Velocity: 0.2, 0.6, 1 m/s Load: 15 N Scar dia: 0.008 m Pin-on-disc Counterbody: 100Cr6 | ~0.56 for 7% and 20% dense dimples, 1 m/s, bi-triangular textured dimples ~0.55 for 20% dense dimples, 1 m/s, circular textured dimples | Dimples with higher density (20%) showed less wear and lower friction compared to untextured disks or disks with 7% dense dimples, especially at higher speeds. CoF in sliding pair with a textured sample is less than untextured one. Higher dimples increase the entrapment of a larger number of wear particles |
| Maize leaf-, Shark-, Snake-, Pitcher-, and Lizard skin-inspired surfaces (PLA) by FDM 3D printing [134] | Velocity: 0.01 m/s Distance: 200 m Load: 27, 59 MPa Time: 15 mins Stroke: 0.01 m Ball-on-plate Counterbody: 0.01 m AISI 52,100 balls Sliding directions: high friction direction (HFD) and the low friction direction (LFD) | At 27 MPa four times rise in the wear track width was reported when sliding against the anisotropic patterns. Lowest and highest values of wear track width (anisotropic) were found for pitcher and snake patterns, respectively. Lowest and highest values of wear track width (isotropic) were found for flat and shark patterns, respectively. Larger wear track width when increasing the contact pressure to 59 MPa. Both the bioinspired pattern and the sliding direction could be advised as the optimum test parameters for reaching the target frictional behavior. | The surface texture exhibited a considerable effect on friction anisotropy under a contact pressure of 27 MPa, specifically for the lizard, the snake, and the pitcher plant. Anisotropic pattern and sliding direction (LFD) could be advised as the optimum test parameters for reaching the best frictional behavior. The CoF decreases outstandingly when the contact pressure increases up to 59 MPa irrespective of the used patterns and particularly when sliding in the HFD due to the increased contact pressure; the morphology of the 3D-printed surface is damaged and compressed against the worn surface, causing the rise in surface temperature. |
| Tree frogs’ toe pad-inspired elastic micropatterned dimple/pillar arrayed structures for wet sliding contacts (Polydimethylsiloxane elastomers) by FDM 3D printing [132] | Velocity: 0.003–0.2 m/s Load: 0.95 N Time: 15 mins Lubrication: Deionized water Pin-on-disc Counterbody: Spherical pins and disks made from Polydimethylsiloxane elastomers | High densities of microstructures are conducive to achieving stable friction from low to high sliding speed. Flat disk displayed higher friction than the microstructured disks at low speeds (v < 0.04 m/s). In the high-speed region (v > 0.04 m/s), all the friction forces were well above those of the flat disks. | Three types of patterns: round dimple, round pillar, and hexagonal pillar. Surface with microdimples displayed a reduction in friction with an increase in the pattern area density. The area density of pillar patterns had no significant effect on the friction property at low sliding speeds, whereas it became a dominating factor with the increase in sliding speed. |
| Lotus leaf-inspired micropillars/channels coated with DLC or Z-DOL (silicon wafers/DLC/Z-DOL) by Photolithography and Deep Reactive Ion Etching [150] | Velocity: 0.001 m/s Load: 0.003 N Time: 15 mins Ball-on-flat Counterbody: 0.001 m soda lime balls | ~0.5 for bare, untextured Si wafers ~0.15 for bare Si wafers, pillar-textured ~0.2 for DLC coated, untextured ~0.11 for DLC coated, pillar-textured ~0.15 for Z-DOL coated, untextured ~0.09 for Z-DOL coated, pillar-textured | Chemical modification by coating DLC/Z-DOL and topographical modification by micropatterns on Si surfaces lowers friction and wear. Topo-modification of Si surfaces renders a reduction in CoF due to the physical reduction in the contact area and debris removal. Micropillars show lower friction than microchannels due to lower contact area. A dual/combined surface modification significantly lowers friction and shows no observable wear of either material. |
| Lotus leaf-inspired circular microdimples (Ti-alloy coated with CrN-MoS2-Ag) by Lasers and Sputtering [151] | Frequency: 20 Hz Load: 20, 30 N Stroke length: 0.001 m Ball-on-disc Counterbody: 10 mm SiC ball | ~0.2, untextured and textured coated surface More than 50% reduced wear for textured coated surface in comparison to untextured coated surface. | Significant 74.4% and 60.4% improvement in wear resistance compared to substrate surface under sliding loads of 20 and 30 N. Dimples resulted in secondary lubrication and capture of debris. |
| Circular microdimples on bronze surface (CuSn6) by Macro indenter [133] | Velocity: 200 r/min Load: 5, 15, 25 N Scar dia: 0.008 m Ball-on-disc Counterbody: 0.004 m Graphite balls | ~0.26, 0.22, 0.20 at 5, 15, 25 N for textured. ~0.35, 0.26, 0.24 at 5, 15, 25 N for untextured. | 15%, 21%, 12% decrease in wear rate for textured samples after 5 N, 15 N, 25 N sliding. |
| Seashell-inspired composite surface pattern (Ni3Al matrix with Sn and Ag) by LMD and wire cutting [142] | Load: 25 N Amplitude: 5 mm Frequency: 1 Hz Sliding time: 1800 s Ball-on-disc Counterbody: 0.006 m high-carbon steel balls | Increasing texture density results in CoF and wear rate decrease first (until 20%) and later leads to increase in their values for textures without SL. For textures with SL, the decrease in their values was noted all throughout from 0–50% density of textures. | Textured surfaces with solid lubricants were always better than patterned without solid lubricant due to the wear debris entrapment of solid lubricants and could improve the anti-friction performance. |
| Mussel-inspired copolymer (MPC with surface induced Nanodiamonds by Copolymerization and stirring [152] | Load: 25 N Amplitude: 0.005 m Frequency: 1 Hz Sliding time: 1800 s Ball-on-disc Counterbody: 0.006 m high-carbon steel balls | ~0.028 for non-lubricated textured surface. ~0.017 for ND-lubricated textured surface. | Significantly reduced the wear on the tribopairs but also further decreased the COF by approximately 40%. ND could be attributed to the rolling effect of the nanoparticles. |
| Honeycomb-inspired self/lubricating steel composite (AISI 4140 steel/SnAgCu–TiC) by Laser cladding [137] | Velocity: 200 r/min Load: 20 N Block-on-ring Counterbody: AISI 4140 steel | Compared with AISI 4140 steel, the average COF of self-lubricating textured composites was decreased by 67%, and the wear depth was decreased by 42%. | Self-repairing behavior of bionic textured AISI 4140 steel filled with multi-solid lubricants. Texturing enables wear debris trapping. Wear debris consists of solid lubricants. |
| Frog paw-inspired self/lubricating steel composite (AISI 4140 steel/SnAgCu) by Additive manufacturing [138] | Velocity: 0.016 m/s Load: 30 N Block-on-ring Counterbody: 0.063 m Si3N4 ceramic ball | Compared to untextured AISI 4140 Steel, AISI 4140-SnAgCu with optimized bionic texture reduced the average friction coefficient by 20%, fluctuation degree by 54%, and wear track depth by 65%. | Optimized parameters of bionic hexagonal type microtexture were reported. Optimized surface texturing resulted in uniformly dispersed lubricants on the worn surface. Superior friction and wear reduction after optimization. |
| Biomimetic coating (Calcium phosphate on Ti) by Biomimetic mineralization [153] | Velocity: 0.02–0.17 m/s Load: 2 N Pin-on-disc Counterbody: 100Cr6 pin Under dry and simulated body fluid. | ~0.6 dry for pure Ti ~0.3 dry for coating ~0.01 lubricated for coating | 50% lower CoF in dry condition in comparison to pure Ti. 80% lower CoF in lubricated condition for faster sliding speeds, i.e., >0.07 m/s. |
| Cancellous bone-inspired ZrO2 coating (ZrO2/modified PTFE) by Thermal spraying/Laser texturing [77] | Velocity: 0.01–0.15 m/s Load: 1–30 N (654–2035 MPa) Ball-on-disc Counterbody: ZrO2 ball, 0.005 m dia. Dry sliding. | Low CoF (<0.065) at ultrahigh contact pressure (10 N, 1411 MPa) with an extremely long lifetime (>1 × 106 cycles). CoF decreased from 0.070 to 0.048 as the load increased from 1 to 30 N. CoF decreased from 0.089 to 0.048 when the sliding velocity increased from 1 to 0.15 m/s. | Low CoF maintained a large range of sliding velocities and applied loads. Textured composites show zero-wear properties. |
| Biomimetic metal ceramic composite (Ti/Ti64 alloy and Calcium phosphate) by Laser deposition [154] | Stroke length: 0.01 m Stroke rate: 0.017 m/s Load: 5 N Ball-on-disc Counterbody: 100Cr6 ball Under simulated body fluid | ~0.85–0.9 SBF lubricated | CaP addition to the Ti increased the strength, hardness, and wear resistance. Wear rate decreased by 92% when 10% wt CaP was added to CP-Ti. 5% wt CaP to Ti64 decreased the wear rate by 70%. |
| Bioinspired Texture | Biomaterial | Topography/Texture Feature | Functionalities |
|---|---|---|---|
| Lotus leaf-inspired [102,164,172] | Polymethyl methacrylate (PMMA) structures | Hierarchical surface featuring protrusions and valleys ranging from 3–10 µm, with nanometric particles (70–100 nm) of a hydrophobic wax-like material in the protrusions. | Antibacterial, self-cleaning |
| Sharkskin-inspired [165,166] | Polydimethylsiloxane embedded elastomer | Denticles refer to diamond-shaped scales with a raised ridge and concave groove, exhibiting some nanostructures. The Sharklet model comprises rectangular features. | Decrease in bacterial adhesion, whether independently or in combination with other chemical and photocatalytic substances |
| Cicada wings-inspired [109,173,174] | Poly (ethylene terephthalate), Titanium, Silicone-based elastomer nanopillars | Highly organized array of nanosized pillars or cones of varying dimensions. | Antibacterial |
| Rice leaves-inspired [156] | Polypropylene (PP) | Papillae in micron height on the surface. | Antibacterial, 53% reduction in bacterial adhesion. |
| Sea urchin-inspired [175] | Poly-lactic acid (PLLA) | Spiny finger-like structure. | Antibacterial, selfcleaning |
| Gecko skin-inspired [161] | Gecko skin | Dome-shaped scales are organized in a hexagonal pattern. These scales range from 100 to 190 µm in diameter and approximately 50 µm in height at the back. Spinules, resembling hairs reach up to 4 µm in length, with sub-micron spacing and a small radius of curvature usually ranging from 10 to 20 nm. | Antibacterial |
| Tree frog toe-inspired [160,176] | Polystyrene/Polydimethylsiloxane composites, Hydrogel | Hexagonal cells, separated by channels. | Improved adhesion |
| Butterfly wing-inspired [165] | Polydimethylsiloxane embedded elastomer | The wing surface features microscales, parallel ridges, and tile-like microstructures, along with nanoscale ribs and lamella-stacking nanostripe structures. | Self-cleaning coatings, |
| Nanoholes with atomic vacancies [177] | MoS2 | Nanohole-enabled nanomaterials | Anti-infection, enhanced biofilm formation. |
| Nanospikes [178] | Polypeptide-functionalized titania nanospikes | Titania (TiO2) nanospike coating on the surface of a Ti substrate. | Antibacterial |
| Rose petals-inspired [100,179] | Polyethylene terephthalate glycol modified substrates | Hierarchical structures feature micropapillae. | Antibacterial and cell attachment. |
| Bioinspired Texture and Material | Erosion Parameters | Erosive Wear Rate | Conclusions/Texture Effect |
|---|---|---|---|
| Desert scorpion skin-inspired V-groove surface (AA6061 alloy) by Wire cut EDM [189] | Impact velocity: 30 m/s Erodent: SiC (irregular) Particle diameter: 100–150 μm Mass flow rate: 0.025 g/s Impact angle: 30° Nozzle diameter: 8 mm Impact distance: 200 mm Erosion time: 600 s | Stabilized erosion rates (200–600 s) for Textured: 4 × 10−8 g/mm2·s Untextured: 9 × 10−8 g/mm2·s | Anti-erosion property of the textured specimens increased by approximately 57.4%. The surface area due to V-shaped texture was increased by 67% compared to that of the smooth specimen. V-shaped textures changed the angle at which the erodent was incident to 90°, leading to reverse air flow and reduced erodent kinetic energy and erosion rate. |
| Desert scorpion skin-inspired V-groove surface (ABS polymer) by Simulation study [212] | Erodent: SiC (irregular) Solid particles density: 3.2 g/cm3 Particle diameter: 105–830 μm Impact angle: 30°, 60°, 90° Erosion time: 10 s | Simulation by finite element software was applied to predict (regression analysis) the erosive wear behavior. | Bionic surface morphology can change the impact angle between particle and target and reduce the probability of impact angle of 20–0 to some extent and hence reduce erosion rate. Improved erosion resistance by 25–28% for textured samples for best conditions. |
| Desert scorpion skin-inspired Square, V, U grooved fan blades (Q235 steel) by Wire cut EDM [190] | Impact velocity: 30 m/s Erodent: SiO2 (irregular) Particle diameter: 150 μm Mass flow rate: 0.025 kg/s Impact angle: 30° Nozzle diameter: 150 mm Nozzle length: 1000 mm Impact distance: 60 mm Erosion time: 450 s | Stabilized erosion rates (230–450 s) for Square-groove: 18 × 10−8 g/mm2·s Square-groove: 15 × 10−8 g/mm2·s U-groove: 12 × 10−8 g/mm2·s V-groove: 12 × 10−8 g/mm2·s | Blades with optimum parameters could effectively improve anti-erosion property by 29%. The formation of “air cushion” equips the V-type groove bionic surface with the best erosion resistance compared with other samples. V-groove surface, feature size of 4 mm, and distance of 2 mm |
| Androctonus australis skin-inspired V-groove, convex hull, and hexagonal pit grooved surface (Stainless steel) by 3D printing [186] | Impact velocity: 25 m/s Erodent: SiO2 (irregular) Particle diameter: 260–941 μm (varied) Mass flow rate: 0.025 kg/s Impact angle: 30° Impact distance: 21 cm Erosion time: 350 s | Stabilized erosion rates (90–350 s) for Untextured: 10 × 10−7 g/mm2·s V-groove: 9 × 10−7 g/mm2·s V-groove + convex hull: 8 × 10−7 g/mm2·s V-groove + hexagonal pit: 8 × 10−7 g/mm2·s V-groove + convex hull + hexagonal pit: 7 × 10−7 g/mm2·s | Hexagonal pit structure had best anti-erosion effect. The reason is that hexagonal pit slot can form the rotational flow, which can affect the motion direction of the particles and reduce impact velocity of the particles. A combination of groove + convex hull + large depth of hexagonal pit led to lowering the erosion rate. |
| Fish- and Snakeskin-inspired flexible structures (Ti6Al4V + rubber) by 3D printing [24] | Impact velocity: 30, 50, 80 m/s Erodent: SiO2 Particle diameter: 0.1–0.6 mm Impact angle: 30° | 10, 22, 96 mm3/kg at 30 m/s, 50 m/s, 80 m/s. | Fish- and snake scale-inspired structures showed improved wear at 50 m/s and a slightly higher wear rate at 30 and 80 m/s compared to rubber. |
| Mole pelt-inspired flexible structures (AISI316L + Diamond + rubber) by 3D printing [24] | Impact velocity: 30, 50, 80 m/s Erodent: SiO2 Particle diameter: 0.1–0.6 mm Impact angle: 30° | 2, 16, 80 mm3/kg at 30 m/s, 50 m/s, 80 m/s. | Mole pelt-inspired flexible structures exhibited around two times better erosion resistance during 30 m/s impact velocity compared with Hardox 400 and polymer while being compressed by 50% of its initial thickness without scarifying its wear resistance. |
| Dung beetle-inspired micro/macro surface (Z-ABS) by 3D printing [211] | Impact velocity: 56 m/s Erodent: Al2O2 Particle diameter: 212–300 μm Mass flow rate: 5.7 g/s Impact angle: 0–90° Impact distance: 20 mm Erosion time: 10 s | Erosion rate (g/g): 2.1 × 10−4 at the impact angle of 15°, 3.6 × 10−4 at impact angle of 30°, and 1.2 × 10−4 at impact angle of 90°. The erosion rate is 3.5 × 10−4 at impact angle of 45°. | Erosion rate of macrotextured surface in parallel (0°) direction was approximately 28% higher than microtextured surface. Erosion rate of macrotextured surface in perpendicular (90°) direction was approximately 71% lower than microtextured. Air cushion effect could be another mechanism of anti-erosive activity of the textured surface. Rebounded particles in perpendicular (90°) led to decreased incoming impact and final wear rate. |
| Tamarisk-inspired micro-V-groove surface (Original tamarisk trunk) [55] | Impact velocity: 30 m/s Erodent: SiO2 Particle diameter: 40–70 mesh Mass flow rate: 25 g/s Impact angle: 90° Impact distance: 20 mm Erosion time: 10 s | Erosion weight loss (mg): Square groove: 93 mg U-type groove: 91 mg V-type groove: 75 mg | V-groove surface on centrifugal fan blades with optimum parameters can effectively improve anti-erosion property by 28.97% in comparison to other, i.e., with square groove surface, U-type groove surface, and convex dome surface, and the sample with smooth surface. |
| Tamarisk-inspired micro-V-groove surface (acrylic plate) [194] | Impact velocity: 30 m/s Erodent: SiO2 Particle diameter: 230 µm Mass flow rate: 2.83 g/s Impact angle: 10°, 90° Impact distance: 20 mm Erosion time: 1 h | Erosion weight loss depends on global and local impingement angle. | Cylindrical surfaces with grooves are shown to be more resistant to erosion when compared to smooth surfaces, regardless of the wind direction. Erosive wear rate range of global impingement angles of a grooved surface changes according to the ductility of the target surface. Factors such as multiple impacts of particles and the air swirls within grooves were shown to exert negligible effects on erosion. |
| Scorpion skin-inspired bumped, grooved, and curvature structures (Stainless steel) by 3D printing [188] | Impact velocity: 30 m/s Erodent: SiO2 Particle diameter: 230 µm Mass flow rate: 2.83 g/s Impact angle: 30° Erosion time: 180 s | Curved surfaces with bumps and grooves show a higher erosion rate than just curved surface. Smooth surfaces with bumps and grooves show lower erosion rate than just smooth surface. | Anti-erosion property due to bumps can be enhanced by 25%. Bumps have the better anti-erosion performance due to reduced area of impact and enlarge relative impact angle in a certain area, and, the smaller the relative impact angle, the lower the erosion rate. |
| Bioinspired Structure | Impact/Mechanical Tests | Conclusions/Texture Effect |
|---|---|---|
| Pangolin scale (obtained from real animal) [135] | Microindentation: Load of 1 N holding for 15 s. Tensile testing: strain rates from 10−5/s to 10−1/s Compression testing: 10−3/s | Microhardness around 220 MPa. Similar tensile behavior when stretched longitudinally and transversely, Young’s modulus around 1.5 GPa, and tensile strength about 108 MPa. Able to absorb large energy when loaded at low strain rate (at 10−5/s). |
| Pangolin scale (Al 6061-T6) by 3D Printing [226] | Ballistic experiment for armor. Projectile fired: Hard steel core Projectile mass: 0.785 kg Projectile velocity: 400 m/s Angle of attack: 0° Distance of attack: 10 m | Improved impact resistance through deflection of target due to the cantilever action (flexibility) offered by the single scale. Increased scales resulted in plugging of projectile due to absence of cantilever action. |
| Beetle wing-inspired honeycomb structure/column tubes (Aluminum) [239] | Impact velocity: 10 m/s Mass: 500 kg | More than 50% improved energy absorption under axial loading. Changing column thickness 0.5 mm–3.0 mm led to an increase in the total absorbed energy and energy absorptive effectiveness. Changing column height 50 mm–200 mm led to an increase in energy absorptive effectiveness first and then decrease due to buckling of the structure. |
| Oxhorn-inspired columnar tubes (Aluminum) [240] | Crashworthiness performance. Impact velocity: 10 m/s Mass: 500 kg | Specific energy absorption of bionic column was 46.2 kJ/kg and 1.3 times and 1.8 times higher than the four-cell conical tube. Energy absorption of bionic column increases with the increased thickness of the core. |
| Yakhorn-inspired columnar tubes (Aluminum foam) [241] | Loading rate: 5 mm/min Mass: 500 kg | Specific energy absorption of bionic tube was 51.23 kJ/kg and is 1.25, 0.89, and 1.02 times higher than that of circular tube, square tube, and tapered tube. Energy absorption capacity increases with the increase in taper, and then decreases. |
| Woodpecker’s beak-inspired honeycomb sandwiched structure (AA6060 Al-alloy) [231] | Impact velocity: 6–7 m/s Mass: 1 kg | Specific energy absorption of the bionic structure increases by 125% and 63.7%, respectively, compared with that of the honeycomb sandwich panel with the same thickness core or the same volume core. |
| Nacre-inspired hierarchical structure (Photopolymer based soft matrix staggered composite) by 3D printing [242] | Strain rate: 0.156 and 0.178 min−1 Cyclical tensile strain loading at 1 Hz | Tests conducted on polymer composites revealed superior damping performance, with a loss modulus reaching approximately 0.5 GPa, significantly surpassing that of individual polymers. The damping enhancement is attributed to the large shear deformation of the viscous soft matrix and the large strengthening effect from the rigid inclusion phase. |
| Nacre-inspired composite (Stiff material—PLA; soft matrix—Nylon and Thermoplastic Polyurethane) by Fused deposition modeling [243] | Impact velocity: 3.13 m/s Mass: 20.41 kg Impact energy: 100 J | A comparative study of two different materials for soft matrix was carried out. Drop impact tests showed that there were increases of 25% and 120% in the energy absorption capabilities of the structure. Dimensions of the tablets and thickness of matrix play a major role in structural properties. |
| Conch Shell-inspired hierarchical structure (Stiff material—Veromagenta Soft material— TangoBlackPlus) by 3D printing [244] | Impact velocity: 2–3 m/s Load: 2500–7000 N Impact energy: 13–25 J | Impact tests demonstrate tortuous stress paths and even distribution within the bioinspired structures, leading to increased energy dissipation. Second-level hierarchy structures exhibit 70% and 85% increases in impact performance compared to single-level hierarchy structures and the stiff constituent, respectively. |
| Cybister Elytra-inspired sandwiched structure (Ti6Al4V alloy) by SLM [245] | Multi-objective optimization | Optimizing bioinspired sandwich structures involve exploring various core layers and arrangements. Two-layered core structures with vertically arranged configurations exhibit excellent mechanical properties, specific energy absorption of 9.16 × 103 J/kg, and energy absorption of 154.80 J. |
| Beetle Elytron-inspired sandwiched structure (Stainless Steel) by Direct metal laser sintering [246] | Tensile and compression experiment. Loading rate: 1 mm/min | The crash box test determined that the structure absorbed 375.5 J of energy, approximately 5 times more than the conventional structure. |
| Shrimp-inspired sandwiched structure (Photosensitive resin and nickel-coated carbon fibers) by Stereolithography 3D magnetic printer [112] | Compression and Charpy impact experiment. Loading rate: 1 mm/min | Magnetic 3D printing was utilized to fabricate Bouligand and herringbone architectures. The impact toughness and compression strength of the composites are contingent upon the orientation and distribution of the fibers. Bionic structures demonstrate enhanced fracture resistance and greater energy dissipation compared to traditional counterparts. |
| Turtle shell-inspired sandwiched structure (Photosensitive resin and nickel-coated carbon fibers) by Stereolithography 3D [247] | Tension and bending test. Loading rate: 2 mm/min and 0.15 mm/min. Impact wear test. Impact cycles: 103, 104, 105 Impact velocity: 184 mm/s, i.e., Kinetic energy: 7.6 mJ Force: 100 N | Studied hydration effects (12 h, 24 h, and 48 h) on mechanical and impacting properties of turtle shell. Under the same impact cycles, energy absorption and contact time increased with the extending of soaking time. The absorption rate is the lowest for shell without soaking. |
| Bamboo-inspired honeycomb structure (Nylon/Carbon fiber) by 3D printing [237] | Quasistatic compression test. Force: 10 kN Velocity: 2 mm/min until a displacement of 40 mm | Bionic structure absorbed 755.83 ± 39.6 J of energy. Bamboo-inspired structure shows better energy absorption than snake- or beetle-inspired structures. |
| Balanus-inspired thin-walled tube structure (AISI 304L) by Dep drawing [248] | Dynamic crushing test. Impact velocity: 4 m/s Impact velocity: 0.025 mm/s | Bionic shell absorbed more energy throughout the deformation history. High load carrying capacity of bionic structure due to hard outer core and soft hierarchical inner core. Crushing force of the balanus structure increased by 26%. |
| Horsetail-inspired thin-walled tube honeycombs structure (Aluminum alloy) by Simulation study [249] | Axial dynamic loading of different cross-sectional configurations (i.e., number of cells) in the bionic structure. Impact punch mass: 1000 kg Impact velocity: 15 m/s | Structures with 16 cells are recommended as energy absorbers. 16 cells were found to have the best overall crashworthiness for vehicle body applications. |
| Pomelo-inspired hierarchically structure (Actual pomelo peel) [250] | Free Fall. Impact height: 10, 13.5, 18 m | 10 m height potential energy between 83.4 and 98.1 J. No sign of damage found. 13.5 m height potential energy between 100 and 117.9 J. No sign of damage found. 18 m height potential energy between 117 and 158.9 J. No sign of damage found. |
| Pomelo-inspired hierarchically structure (PEEK) by 3D printing [236] | Compression test. Loading rate: 0.02 mm/s Compression strain: up to 70%. | Guidance to design lightweight materials with high energy absorption. Crush force efficiency and dropping force efficiency are closer to 1 as compared with the non-pomelo peel-inspired structures. No abrupt changes in compression forces for bionic pomelo PEEK structures. |
| Cashew nutshell-inspired biocomposites (ABS/Hemp/Glass fiber) by 3D printing [238] | Tensile, Flexural, Compression, Izod impact, Low velocity drop load impact, Fatigue, Fracture toughness tests. | Best composition in vol.%: Resin: 60; Fiber: 30; ABS: 10; Lignin: 1 Maximum mechanical property achieved: tensile strength, flexural strength, Izod impact, and compression of 136 MPa, 168 MPa, 4.82 kJ/m2, and 155 MPa, respectively. Maximum fatigue life counts noted for the composite about 33,709, 25,781, and 19,633 for 50%, 70%, and 90%. Maximum fracture toughness compared to pure epoxy resin, with value of 32.5 MPa·m1/2. Highly toughened and marginally flexible composites could be potentially employed in the fabrication of high-endurance morphing wings for unmanned aerial vehicles and aircraft wings. |
| Turtle shell-inspired sandwiched structure (Rubber/Carbon fibers) by Vacuum assisted resin injection [49] | Drop hammer impact test. Impact mass: 7.29 kg Impact energy: 30 J, 90 J Impact height: 0.42 m, 1.26 m | Turtle-inspired structures show an improvement in impact resistance by 10–25%. Main impact failure modes include coating fracture, fiber fracture, compression damage deformation failure of the rubber core, fiber delamination, and interlayer degumming. Size of the hammer head radius has a significant effect on the energy absorption characteristics. Hammer head radius is 10 mm; the absorbed energy and specific energy absorption increase by 25% compared with hammer head radius of 8 mm and 83%. |
| Bioinspired Structure | Conclusions/Texture Effect |
|---|---|
| Sea urchin teeth-inspired rock-cutting tool (Crystalline calcite teeth/epoxy composite) [271,272] | Self-breaking or fracturing leads to self-sharpening. Detailed description of self-sharpening phenomena. |
| Dung beetle-inspired Bulldozing plate (UHMWPE) [267] | Bionic UHMWPE could reduce soil adhesion and draught considerably. 30% reduction in cutting resistance. |
| Lotus leaf/Shark skin-inspired soil shovel/tillage tool (Steel-based) [266] | 1.85–4% reduction in cutting resistance. |
| Dung beetle-inspired toothed wheel tool (Steel-based) [35] | 16.5% reduction in cutting resistance. 11.8% reduction in stress concentration. 24% increased microbasin. |
| Shark skin-inspired subsoiler tillage tool (Steel-based) [303] | 21.9% reduction in cutting resistance. 24.8% reduction in consumption energy. Improved crop stress resistance. |
| Mole pelt-inspired cutting blade for tillage tool (Steel-based) [36,282] | 12.8% reduction in cutting resistance. 4% reduction in torque. 60% improved stubble breaking rate. |
| Pangolin-inspired drill bit for dry rock cutting (Impregnated diamond bit) [260] | 97.5% increased drilling speed. 26.8% increased service life. |
| Mole claw-inspired drill bit (Impregnated diamond bit) [264] | 230% increased drilling efficiency. 345% increased service life. |
| Beetle/Earthworm-inspired drill bit (Impregnated diamond bit) [191,261] | 91% increased wear resistance. 27% increased grinding performance. |
| Bamboo/human tooth/annual ring/shell/mole pelt-inspired drill bit (Impregnated diamond bit) [285] | Improved cutting resistance. Improved wear resistance. 250% increased penetration rate. |
| Cat claw-inspired drill bit (Impregnated diamond bit) [304] | 13% increased penetration rate. |
| Dung beetle-inspired drill bit (cemented carbide bit) [41] | 45% increased drilling speed. 23% decreased wear rate. |
| Dung beetle-inspired microgrooves/pits turning tool for dry cutting (AISI 1045 steel) [305] | 24% decreased cutting force. 29% decreased cutting temperature. Grooves and pits led to wear debris (graphite) storage and improved lubrication. |
| Dung beetle-inspired microgrooved tool for dry machining of Ti-alloy (PCD tools) byFiber lasers [278] | Reduced friction coefficient. Reduced tool-chip contact length. Reduced cutting force. Reduced adhesion. |
| Rat claw-inspired microdimples/grooves for dry cutting of Ti-alloy (cemented carbide tool) [296] | Increased tool’s anti-adhesion ability. Increased chip-breaking efficiency. Increased chip curling. |
| Snakeskin-inspired tool for dry cutting of AISI/SAE 4140 (cemented carbide inserts) byFemto second lasers [294] | 65% reduced cutting temperature. 51% reduced cutting power. 16% reduced cutting force. Reduced sticking sliding contact. |
| Sea urchin/Shark teeth-inspired microtexture/serrated cutting edges for finish turning of ferrous alloys. (PCBN inserts) [44] | Reduced tool wear. Reduced finished surface roughness, Ra. |
| Corn leaf’s teeth-inspired microgrooved blade for milling of Al-alloy byFEM simulation [289] | 10% reduced cutting force. Reduced cutting temperature. Reduced cutting vibration. |
| Beetle-inspired microtexture on tool cutter for milling of Ti-alloy (PCD and carbide tool) [306] | 7% reduced cutting stress. Reduced cutting force. Reduced tool wear. Reduced cutting force fluctuation. |
| Badger teeth-inspired microdimples/grooves on circular saw blade (Steel-based tool) [307] | Reduced cutting torque. Reduced workpiece tension. Increased cutting quality. |
| Shark skin-inspired microgrooves on cutting tool with WS2/C coating (Carbide tool) [298] | Reduced flank wear. Reduced surface roughness. Reduced surface temperature. |
| Desert scorpion-inspired microgrooves on cutting tool (Carbide tool) [299] | Reduced flank wear. No effect on surface roughness. Textures on the flank faces could also act as storage for powder chip and can protect the surface from abrasion. |
| Scorpion or dung beetle-inspired microgrooves or dimples on cutting tool (Carbide tool) byLaser processing [293] | 4.2% reduction in friction in dry cutting condition. 5.1% reduction in friction in oil lubrication. Superior chip flow in groove microtexture perpendicular. Groove microtexture can store lubrication oil and improve lubrication and cooling effect during cutting. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kumar, R.; Rezapourian, M.; Rahmani, R.; Maurya, H.S.; Kamboj, N.; Hussainova, I. Bioinspired and Multifunctional Tribological Materials for Sliding, Erosive, Machining, and Energy-Absorbing Conditions: A Review. Biomimetics 2024, 9, 209. https://doi.org/10.3390/biomimetics9040209
Kumar R, Rezapourian M, Rahmani R, Maurya HS, Kamboj N, Hussainova I. Bioinspired and Multifunctional Tribological Materials for Sliding, Erosive, Machining, and Energy-Absorbing Conditions: A Review. Biomimetics. 2024; 9(4):209. https://doi.org/10.3390/biomimetics9040209
Chicago/Turabian StyleKumar, Rahul, Mansoureh Rezapourian, Ramin Rahmani, Himanshu S. Maurya, Nikhil Kamboj, and Irina Hussainova. 2024. "Bioinspired and Multifunctional Tribological Materials for Sliding, Erosive, Machining, and Energy-Absorbing Conditions: A Review" Biomimetics 9, no. 4: 209. https://doi.org/10.3390/biomimetics9040209