Our ability to judge the TTC of a decelerating object, despite its importance in many traffic situations, seems to be at least as poor as our ability to judge accelerating objects, e.g., [
4]. Thus, artificially decreasing the size of decelerating vehicles should be as beneficial as increasing the size of positively accelerating vehicles. We combined both in Experiment 2. Also, to test whether the size manipulation can effectively alter the first-order strategy, we designed the stimuli such that the distance and velocity at occlusion were identical for all conditions.
4.3. Design
Based on the results from Experiment 1, only the threefold enlargement in the projected size (in the constant-velocity trials) and gradual enhancement (in the acceleration trials) were further investigated as they showed the most promising reduction in the TTC estimation error. Additionally, this experiment also examined negative acceleration. In order to achieve identical occlusion distances for all three types of acceleration (positive, negative, and none), it was necessary to adjust the acceleration magnitude and velocity at occlusion.
We presented the approaching vehicle with three
acceleration levels, 0 m/s
2 (constant-velocity approach), +2.0 m/s
2 (accelerated approach), and −2.0 m/s
2 (decelerated approach). An overview of the experimental conditions regarding vehicle’s size and enhancement is provided in
Table 4. For constant velocities, there were three
size variations: (a) the vehicle remained at its original size (100% size), (b) the vehicle’s size was decreased to a factor of one-third of its original size (33% size), and (c) the vehicle’s size was increased by a factor of three (300% size). The size of the vehicle remained constant throughout a trial for the constant-velocity conditions. For the accelerated approaches, there were two
size enhancements: (a) the vehicle remained at its original size without any size changes (original size), (b) the vehicle’s size gradually increased from its original size to three times its size during the visible time interval (in the case of positive acceleration) or decreased from its original size to one-third of its size during the visible time interval (in the case of negative acceleration). In summary, we presented three types of constant-speed and two types of accelerated car approaches, all of which were fully crossed with three
occlusion distances (
Docc = 30, 45, and 60 m) and two
velocities at occlusion (
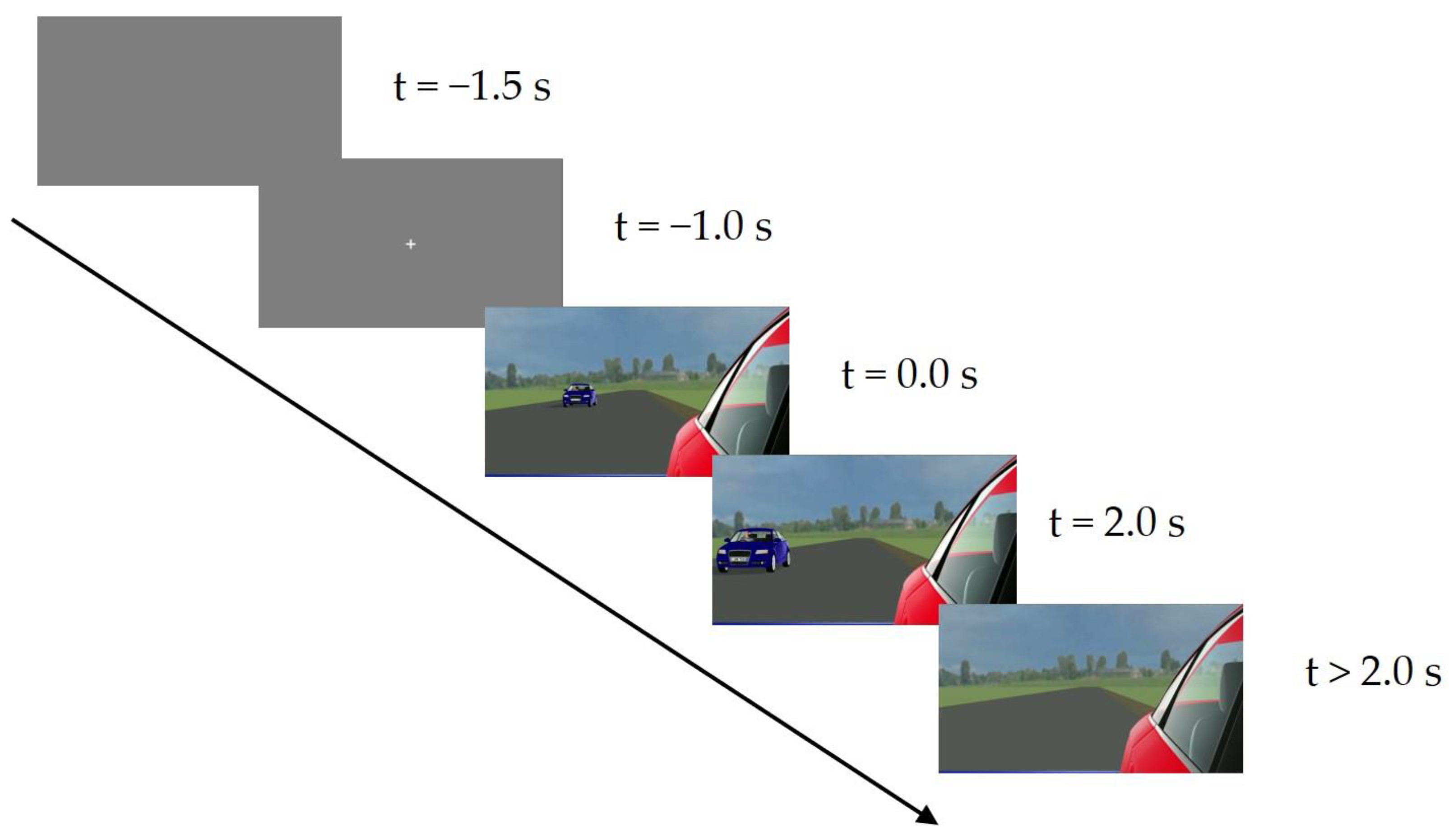
vocc = 60 and 80 km/h). This resulted in 18 different driving profiles with actual TTCs ranging from 1.28 to 5.26 s. Overall, there were 42 experimental conditions (18 conditions with constant velocity and 24 conditions with acceleration), each presented 10 times, resulting in a total of 420 experimental trials, in addition to 10 training trials.
4.5. Results
Beyond the replication of the size-enhancement effects found in Experiment 1, Experiment 2 also considered negative acceleration. In the case of negative acceleration (deceleration), we expected an analogous effect. That is, a reduction in the projected size should lead to longer TTC estimates. Unlike Experiment 1, in which the actual TTC was varied as an experimental factor, in Experiment 2, we decided to vary the occlusion distance. This modification enabled us to compare the TTC estimations between the conditions at a given distance without having to account for additional distance-dependent variations in the optical angle and thereby the projected size. Per participant and experimental condition, we excluded extreme data points according to a Tukey criterion of three interquartile ranges below the first or above the third quartile, and we subsequently aggregated the data per combination of subject and experimental condition. This affected 1.09% (n = 201 data points) of the ntotal = 18,480 data points.
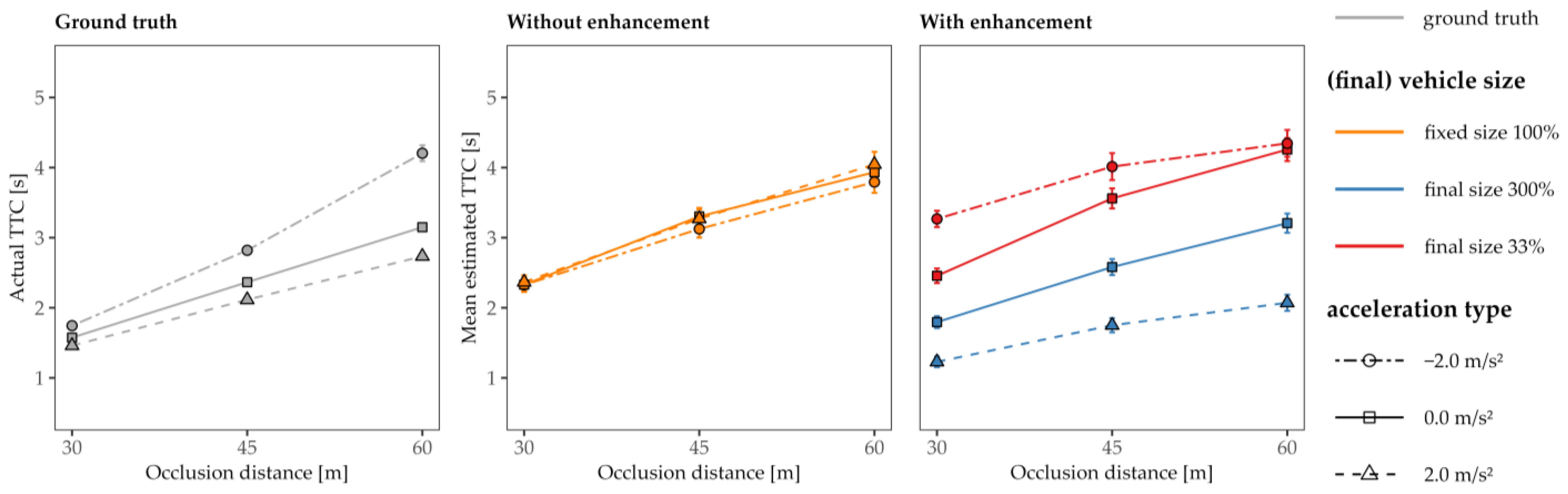
Figure 5 shows the actual TTC (left panel), the mean estimated TTCs for all three acceleration levels (
a = −2.0, 0, and +2.0 m/s
2) for vehicles with an unaltered “original” size (middle panel), and the mean estimated TTCs for conditions with an altered size (right panel), each as a function of the occlusion distance. Since we implemented the same velocity and distance at occlusion for all three driving profiles, it was now possible to determine whether the TTC estimations followed a first-order pattern. Be reminded that a first-order estimation strategy is based on the vehicle’s distance and velocity at occlusion but neglects any acceleration. Note that a first-order TTC estimation strategy would only be appropriate for the constant-speed approach as there is
no acceleration information that needs to be accounted for. If an observer uses such a strategy, the TTC estimations for constant-speed and accelerated approaches would be, in principle, identical. Although all three acceleration types produced different actual TTCs, it is striking that the TTC estimations showed only small deviations among the driving profiles, indicating that the acceleration for
a ≠ 0 was not adequately taken into account without additional size enhancement, compatible with a first-order estimation.
Figure 5 (right panel) further demonstrates that the TTC estimation were not solely reliant on the vehicle’s final size during occlusion. If this had been the case, the subjects would have judged the constant-speed and accelerated approaches with the same final size to be similar. Instead, they shortened their estimations for the decelerated approaches and lengthened their estimations for the accelerated approaches more strongly than for the constant-speed approach with the same final size, which highlights that gradual size variation also plays a major role in TTC estimation.
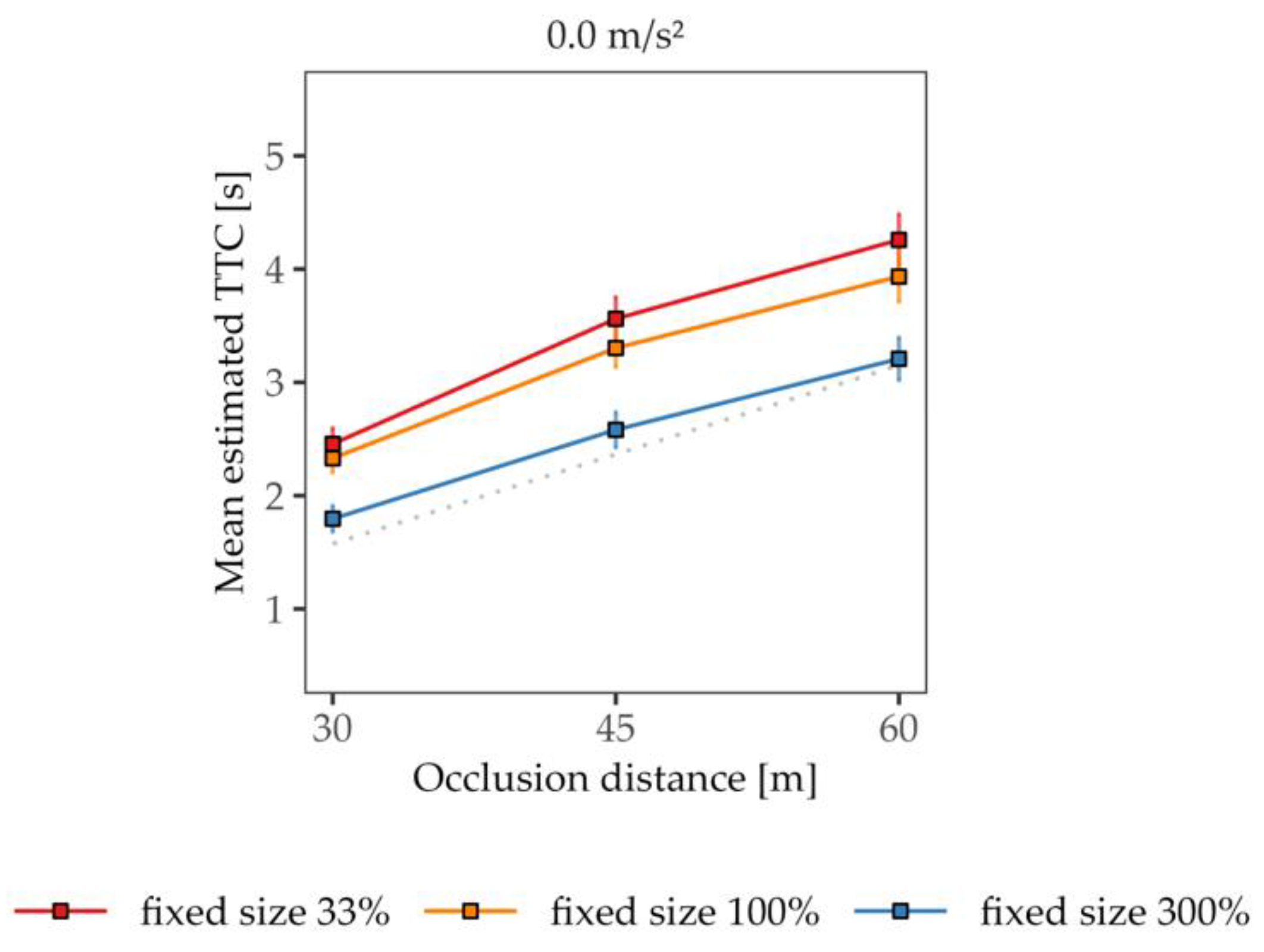
Similar to the results from Experiment 1, the size–arrival-effect was observed for the constant-velocity trials (see
Figure 6). As expected, a reduction in the vehicle’s size to a third of its original size led to significantly longer TTC estimations (
M = 3.43 s,
SD = 1.18 s) compared to the original-sized vehicle (
M = 3.19 s,
SD = 1.10 s), while an increase in the vehicle’s size by a factor of three led to significantly lower TTC estimations (
M = 2.53 s,
SD = 0.98 s) relative to the original-sized vehicle. The effect of the size adjustment was confirmed via a one-factorial rmANOVA for the constant-velocity trials (
F(2, 86) = 84.28,
p < 0.001,
η2p = 0.66). All three post hoc tests comparing the size conditions reached significance (all
pbonf < 0.001). Note that the final size in the 33% condition was only one-ninth of that of the 300% condition. The shift in mean TTC estimates quite nicely reflects the size proportion among the conditions, as is visible in
Figure 6.
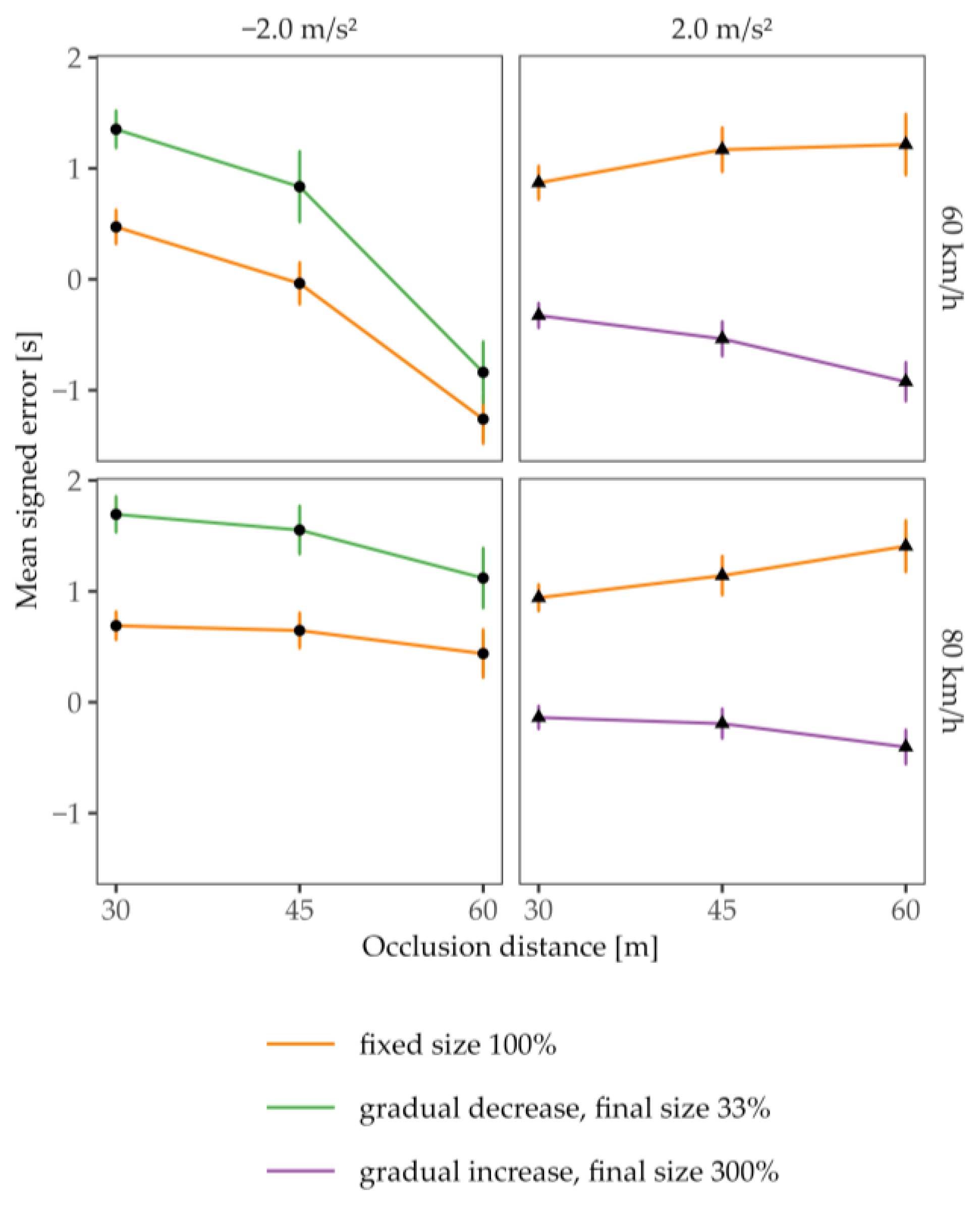
To examine whether the gradual size variation could compensate for errors due to first-order estimations for both positively and negatively accelerating vehicles, we contrasted the TTC estimates for conditions with and without enhancements for the different distances and velocities at occlusion. To this end, we analyzed the TTC estimation error, calculated as the signed difference between the mean estimated and actual TTC (mean signed error or constant error, e.g., [
31]), for each of the two dynamic (
a ≠ 0) driving profiles. Since the actual TTC covaried as a function of the acceleration rate, distance, and velocity at occlusion in Experiment 2, it was not possible to analyze the mean estimated TTCs. The mean signed error, in contrast, accounts for different actual TTCs and thus allowed us to compare the effect of the size enhancement among different distances and velocities at occlusion. As can be seen in
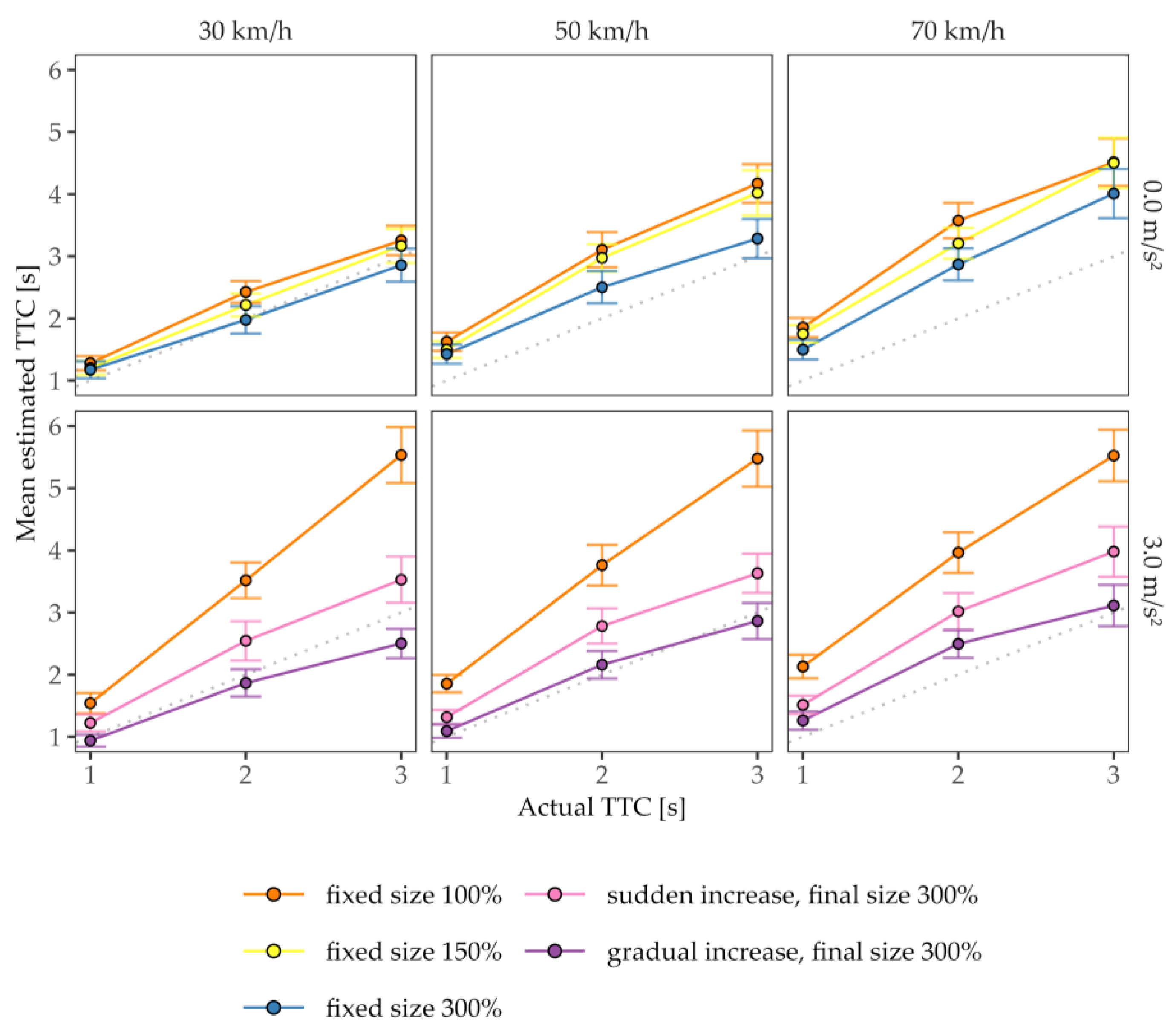
Figure 7, the mean signed error decreased for the accelerated approaches with size enhancement (right column), compatible with a reduction in the overestimation of the TTC. In contrast, for decelerated approaches (left column), the gradual decrease in the vehicle’s size introduced larger mean signed errors. On average, the subjects lengthened their TTC estimates for decelerating cars when the vehicle “shrunk” during the approach, which is in line with the intended compensation for errors due to a first-order estimation. Since the size enhancements were qualitatively different for the two dynamic approaches, we conducted three-factorial rmANOVAs on the mean signed error for the accelerating and decelerating cars separately.
Table 5 presents the results of the repeated measures ANOVA (rmANOVA) for trials with positive acceleration, for which all effects were significant except the main effect of occlusion distance and the three-way interaction. The main effect for enhancement indicates that the presence of enhancement led to shorter mean signed errors. This effect is further amplified at lower speeds (the interaction effect of enhancement × occlusion velocity) and larger distances (an interaction between enhancement and occlusion distance). These findings are consistent with the size–arrival effect, suggesting that the subjects utilized the size manipulation/enhancement as a cue for estimating the TTC. In accordance with the ratio between distance and velocity at occlusion, which determined the actual TTC in Experiment 2, the subjects adjusted their estimations. However, their TTC estimates deviated more strongly from the veridical value at larger actual TTCs (interaction distance and velocity at occlusion).
Table 6 presents the results of the repeated measures ANOVA (rmANOVA) for trials with a decelerated approach, for which all main effects and the interaction effects for enhancement × occlusion distance and occlusion velocity × occlusion distance reached significance. The main effect for distance is consistent with the assumption that a change in velocity, i.e., deceleration, is less noticeable at a greater distance. This effect is particularly pronounced at lower speeds (the interaction effect of occlusion velocity × occlusion distance). The effect of enhancement was more profound for shorter than for larger distances (an interaction between enhancement and the distance at occlusion), which suggests that the gradual size reduction was more salient for the closer distance range.
To determine whether the enhancement had the same effect for dynamic (accelerated and decelerated) approaches as for constant-speed approaches, we aggregated the mean signed error across the different distances and velocities at occlusion and conducted an rmANOVA with the factors final size and acceleration. The latter factor included two levels (
a = 0,
a ≠ 0 with data for positive and negative accelerations). The significant interaction between final size and acceleration (see
Table 7) confirms that the enhancement had a differential effect for dynamic and constant-speed approaches, suggesting that the final size was not the only cue being used in the modification of the TTC estimations for accelerated and decelerated approaches.
In summary, the results suggest that the size manipulations had the hypothesized effects and modified the TTC estimations. Increasing the size of accelerating vehicles and decreasing their size during negative acceleration changed judgments in agreement with the size–arrival effect.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}