
The Analytical Solutions to the Fractional Kraenkel–Manna–Merle System in Ferromagnetic Materials

 ,
,  , and
, and {kind=link}
{kind=link}
Abstract
:1. Introduction
2. M-Truncated Derivative
3. Traveling Wave Equation for the KMMS-MTD
4. Exact Solutions to the KMMS-MTD (1)
4.1. The KMMS-MTD without the Damping Term
4.2. The KMMS-MTD with the Damping Term
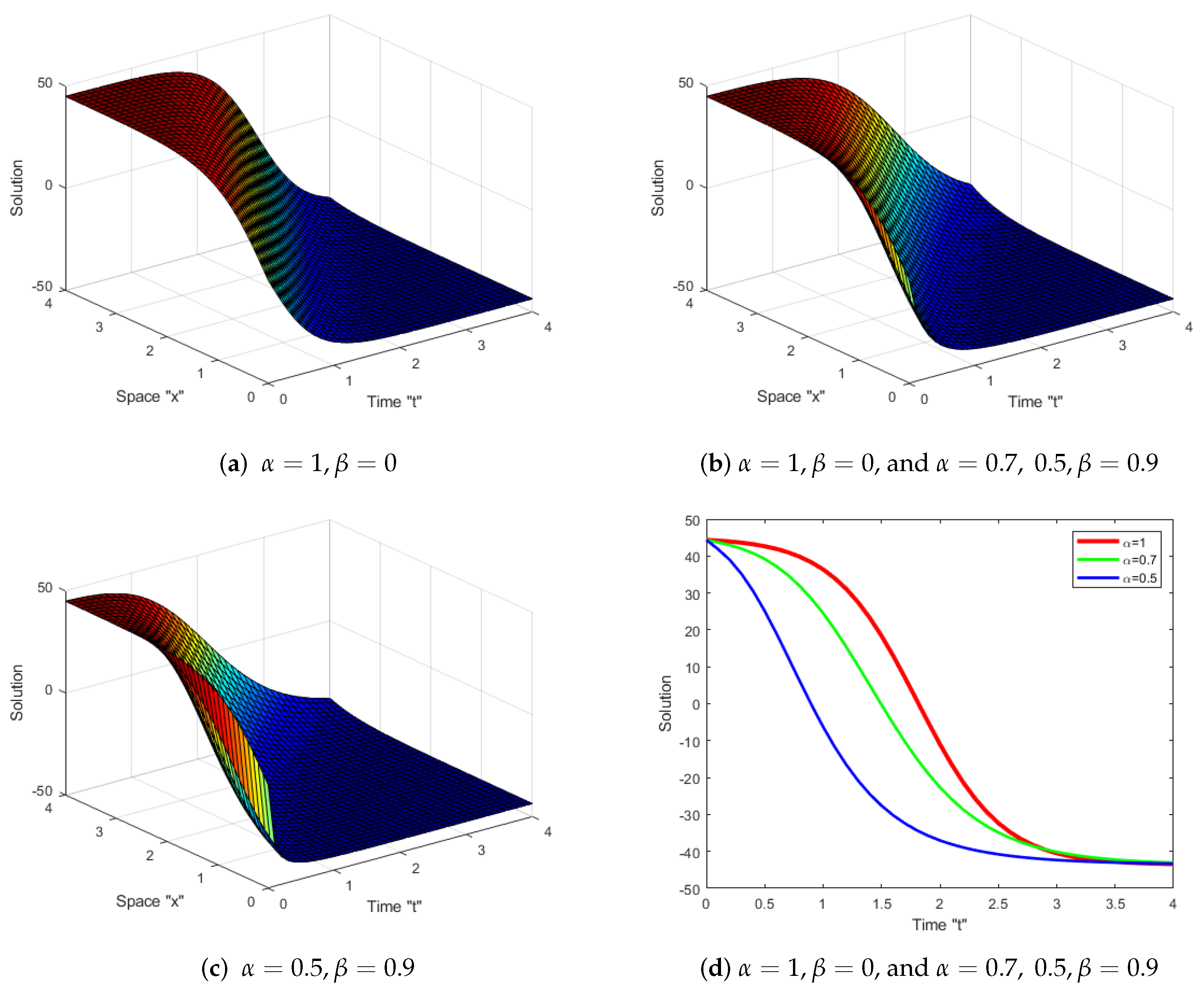
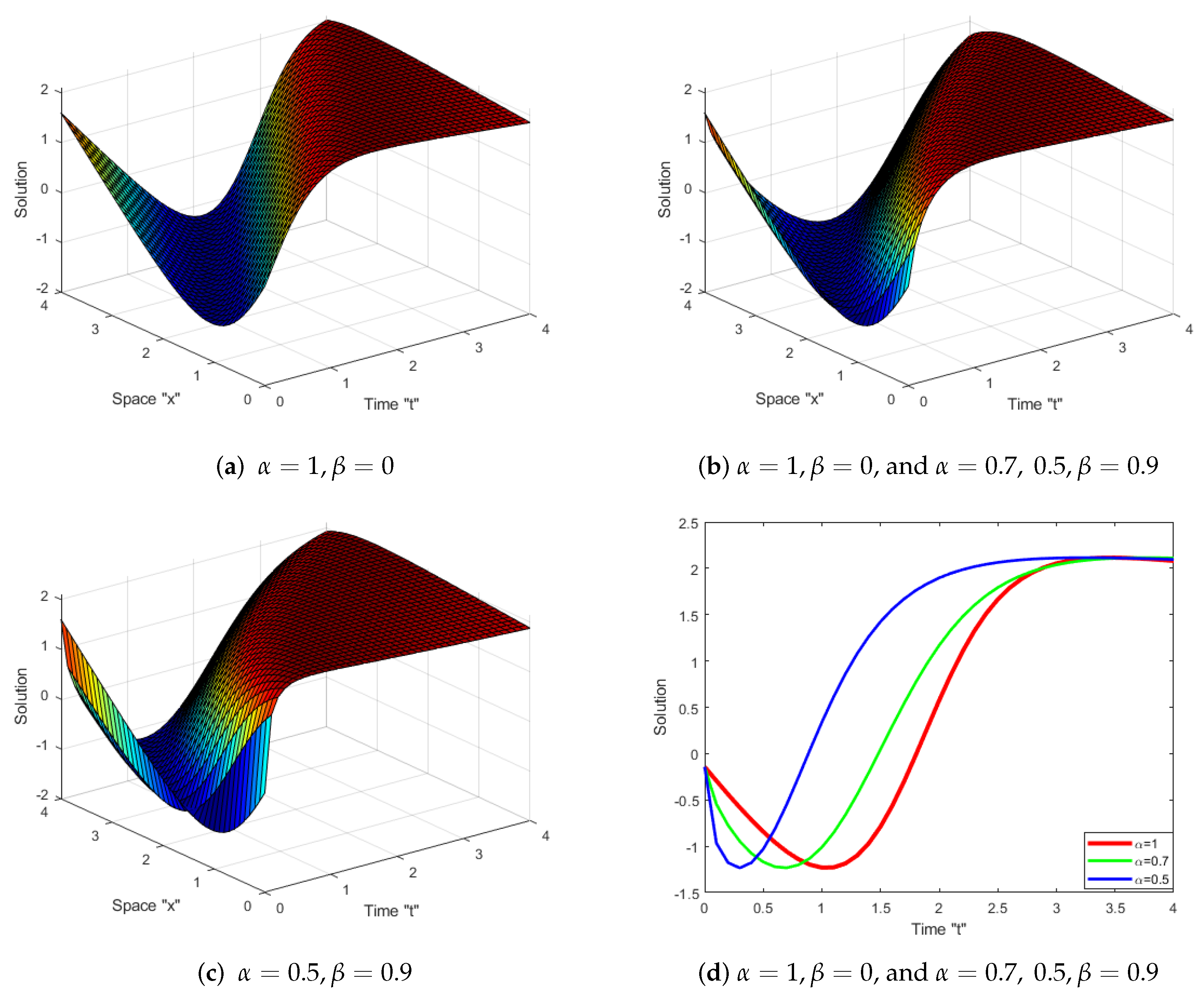
5. Discussion and Graphical Representation
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yuste, S.B.; Acedo, L.; Lindenberg, K. Reaction front in an A + B → C reaction–subdiffusion process. Phys. Rev. E 2004, 69, 036126. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Benson, D.A.; Wheatcraft, S.W.; Meerschaert, M.M. The fractional-order governing equation of Lévy motion. Water Resour. Res. 2000, 36, 1413–1423. [Google Scholar] [CrossRef] [Green Version]
- Iqbal, N.; Wu, R.; Mohammed, W.W. Pattern formation induced by fractional cross-diffusion in a 3-species food chain model with harvesting. Math. Comput. Simul. 2021, 188, 102–119. [Google Scholar] [CrossRef]
- Newman, N.; Wu, S.Y.; Liu, H.X.; Medvedeva, J.E.; Gu, L.; Singh, R.K.; Yu, Z.G.; Krainsky, I.L.; Krishnamurthy, S.; Smith, D.J.; et al. Recent progress towards the development of ferromagnetic nitride semiconductors for spintronic applications. Phys. Status Solidi A 2006, 203, 2729–2737. [Google Scholar] [CrossRef]
- Zabel, H. Progress in spintronics. Superlatt Microstruct 2009, 46, 541–553. [Google Scholar] [CrossRef]
- Shen, B.G.; Sun, J.R.; Hu, F.X.; Zhang, H.W.; Cheng, Z.H. Recent progress in exploring magnetocaloric materials. Adv. Mater. 2009, 21, 4545–4564. [Google Scholar] [CrossRef] [Green Version]
- Tanaka, M.; Ohya, S.; Hai, P.N. Recent progress in III–V based ferromagnetic semiconductors: Band structure, Fermi level, and tunneling transport. Appl. Phys. Rev. 2014, 1, 011102. [Google Scholar] [CrossRef] [Green Version]
- Dietl, T.; Sato, K.; Fukushima, T.; Bonanni, A.; Jamet, M.; Barski, A.; Kuroda, S.; Tanaka, M.; Hai, P.N.; Katayama-Yoshida, H. Spinodal nanodecomposition in semiconductors doped with transition metals. Rev. Mod. Phys. 2015, 87, 1311–1377. [Google Scholar] [CrossRef] [Green Version]
- Manafian, J. Optical soliton solutions for Schrodinger type nonlinear evolution equations by the tan(φ/2)-expansion method. Optik 2016, 127, 4222–4245. [Google Scholar] [CrossRef]
- Wang, M.L.; Li, X.Z.; Zhang, J.L. The (G′/G)-expansion method and travelling wave solutions of nonlinear evolution equations in mathematical physics. Phys. Lett. A 2008, 372, 417–423. [Google Scholar] [CrossRef]
- Zhang, H. New application of the (G′/G)-expansion method. Commun. Nonlinear Sci. Numer. Simul. 2009, 14, 3220–3225. [Google Scholar] [CrossRef]
- Zafar, A.; Ali, K.K.; Raheel, M.; Jafar, N.; Nisar, K.S. Soliton solutions to the DNA Peyrard-Bishop equation with beta-derivative via three distinctive approaches. Eur. Phys. J. Plus 2020, 135, 1–17. [Google Scholar] [CrossRef]
- Ewees, A.A.; Abd Elaziz, M.; Al-Qaness, M.A.A.; Khalil, H.A.; Kim, S. Improved Artificial Bee Colony Using Sine-Cosine Algorithm for Multi-Level Thresholding Image Segmentation. IEEE Access 2020, 8, 26304–26315. [Google Scholar] [CrossRef]
- Wazwaz, A.M. A sine-cosine method for handling nonlinear wave equations. Math. Comput. Model. 2004, 40, 499–508. [Google Scholar] [CrossRef]
- Yan, C. A simple transformation for nonlinear waves. Phys. Lett. A 1996, 224, 77–84. [Google Scholar] [CrossRef]
- Khan, K.; Akbar, M.A. The exp(-(ς))-expansion method for finding travelling wave solutions of Vakhnenko-Parkes equation. Int. J. Dyn. Syst. Differ. Equ. 2014, 5, 72–83. [Google Scholar]
- Sadat, R.; Kassem, M.M. Lie Analysis and Novel Analytical Solutions for the Time-Fractional Coupled Whitham–Broer–Kaup Equations. Int. J. Appl. Comput. Math. 2019, 5, 28. [Google Scholar] [CrossRef]
- Mohammed, W.W.; Iqbal, N. Impact of the same degenerate additive noise on a coupled system of fractional space diffusion equations. Fractals 2022, 30, 2240033. [Google Scholar] [CrossRef]
- Mohammed, W.W. Stochastic amplitude equation for the stochastic generalized Swift–Hohenberg equation. J. Egypt. Math. Soc. 2015, 23, 482–489. [Google Scholar] [CrossRef] [Green Version]
- Wazwaz, A.M. The tanh method: Exact solutions of the Sine–Gordon and Sinh–Gordon equations. Appl. Math. Comput. 2005, 167, 1196–1210. [Google Scholar] [CrossRef]
- Malfliet, W.; Hereman, W. The tanh method. I. Exact solutions of nonlinear evolution and wave equations. Phys. Scr. 1996, 54, 563–568. [Google Scholar] [CrossRef]
- Arafa, A.; Elmahdy, G. Application of residual power series method to fractional coupled physical equations arising in fluids flow. Int. J. Differ. Equ. 2018, 2018, 7692849. [Google Scholar] [CrossRef]
- Yan, Z.L. Abunbant families of Jacobi elliptic function solutions of the dimensional integrable Davey-Stewartson-type equation via a new method. Chaos Solitons Fractals 2003, 18, 299–309. [Google Scholar] [CrossRef]
- Nguepjouo, F.T.; Kuetche, V.K.; Kofane, T.C. Soliton interactions between multivalued localized waveguide channels within ferrites. Phys. Rev. E 2014, 89, 063201. [Google Scholar] [CrossRef]
- Tchokouansi, H.T.; Kuetche, V.K.; Kofane, T.C. On the propagation of solitons in ferrites: The inverse scattering approach. Chaos Solitons Fractals 2016, 86, 64–74. [Google Scholar] [CrossRef]
- Li, B.Q.; Ma, Y.L. Rich soliton structures for the Kraenkel–Manna–Merle (KMM) system in ferromagnetic materials. J. Supercond. Nov. Magn. 2018, 31, 773–1778. [Google Scholar] [CrossRef]
- Li, B.Q.; Ma, Y.L. Loop-like periodic waves and solitons to the Kraenkel–Manna–Merle system in ferrites. J. Electromagnet. Waves Appl. 2018, 32, 1275–1286. [Google Scholar] [CrossRef]
- Raza, N.; Hassan, Z.; Butt, A.R.; Rahman, R.U.; Abdel-Aty, A.; Mahmoud, M. New and more dual-mode solitary wave solutions for the Kraenkel–Manna–Merle system incorporating fractal effects. Math. Methods Appl. Sci. 2022, 45, 2964–2983. [Google Scholar] [CrossRef]
- Mohammed, W.W.; El-Morshedy, M.; Cesarano, C.; Al-Askar, F.M. Soliton Solutions of Fractional Stochastic Kraenkel–Manna–Merle Equations in Ferromagnetic Materials. Fractal Fract. 2023, 7, 328. [Google Scholar] [CrossRef]
- Katugampola, U.N. New approach to a generalized fractional integral. Appl. Math. Comput. 2011, 218, 860–865. [Google Scholar] [CrossRef] [Green Version]
- Katugampola, U.N. New approach to generalized fractional derivatives. Bull. Math. Anal. Appl. 2014, 6, 1–15. [Google Scholar]
- Mouy, M.; Boulares, H.; Alshammari, S.; Alshammari, M.; Laskri, Y.; Mohammed, W.W. On Averaging Principle for Caputo–Hadamard Fractional Stochastic Differential Pantograph Equation. Fractal. Fract. 2023, 7, 31. [Google Scholar] [CrossRef]
- Kilbas, A.A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations; Elsevier: Amsterdam, The Netherlands, 2016. [Google Scholar]
- Samko, S.G.; Kilbas, A.A.; Marichev, O.I. Fractional Integrals and Derivatives, Theory and Applications; Gordon and Breach: Yverdon, Switzerland, 1993. [Google Scholar]
- Sousa, J.V.; de Oliveira, E.C. A new truncated Mfractional derivative type unifying some fractional derivative types with classical properties. Int. J. Anal. Appl. 2018, 16, 83–96. [Google Scholar]
- Hussain, A.; Jhangeer, A.; Abbas, N.; Khan, I.; Sherif, E.M. Optical solitons of fractional complex Ginzburg–Landau equation with conformable, beta, and M-truncated derivatives: A comparative study. Adv. Differ. Equ. 2020, 2020, 612. [Google Scholar] [CrossRef]
- Zahrana, E.H.M.; Khater, M.M.A. Modified extended tanh-function method and its applications to the Bogoyavlenskii equation. Appl. Math. Model. 2016, 3, 1769–1775. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alshammari, M.; Hamza, A.E.; Cesarano, C.; Aly, E.S.; Mohammed, W.W. The Analytical Solutions to the Fractional Kraenkel–Manna–Merle System in Ferromagnetic Materials. Fractal Fract. 2023, 7, 523. https://doi.org/10.3390/fractalfract7070523
Alshammari M, Hamza AE, Cesarano C, Aly ES, Mohammed WW. The Analytical Solutions to the Fractional Kraenkel–Manna–Merle System in Ferromagnetic Materials. Fractal and Fractional. 2023; 7(7):523. https://doi.org/10.3390/fractalfract7070523
Chicago/Turabian StyleAlshammari, Mohammad, Amjad E. Hamza, Clemente Cesarano, Elkhateeb S. Aly, and Wael W. Mohammed. 2023. "The Analytical Solutions to the Fractional Kraenkel–Manna–Merle System in Ferromagnetic Materials" Fractal and Fractional 7, no. 7: 523. https://doi.org/10.3390/fractalfract7070523