
New Cascaded 1+PII2D/FOPID Load Frequency Controller for Modern Power Grids including Superconducting Magnetic Energy Storage and Renewable Energy

 , , ,
, , , 
Abstract
:1. Introduction
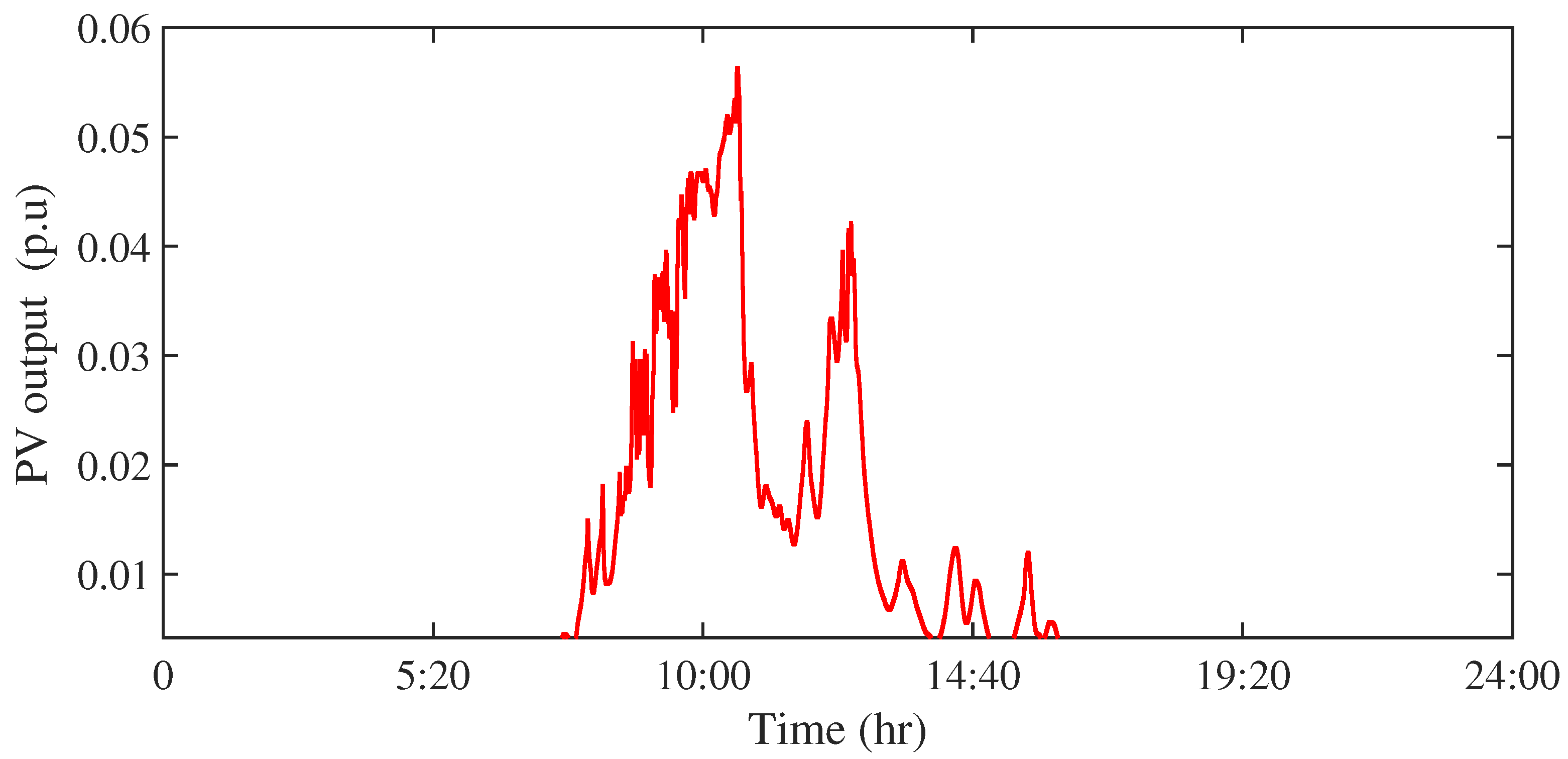
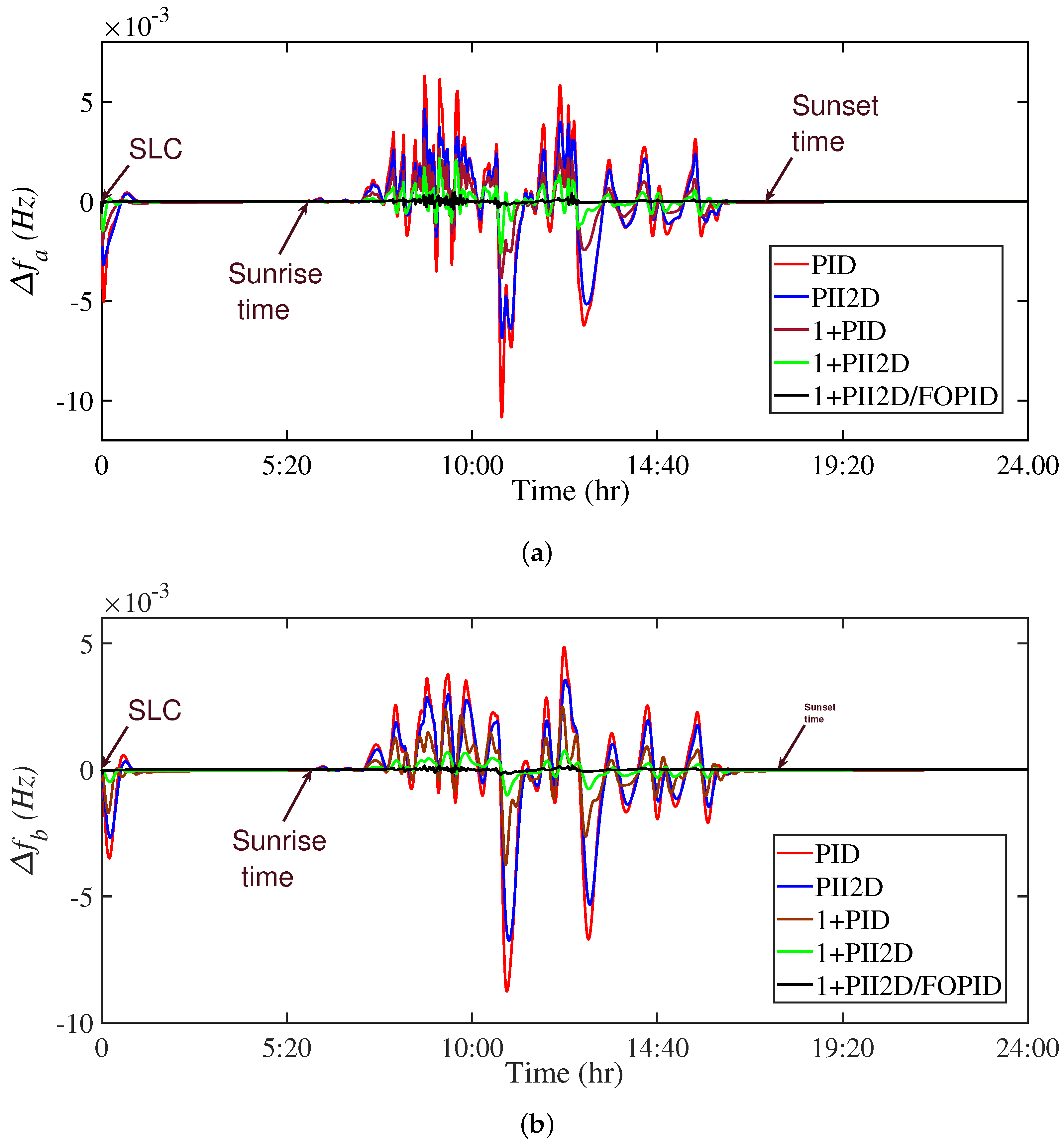
- A critical characteristic of RESs is their intermittency and related variations of generated power with environmental conditions, such as irradiance, temperature, and wind speeds. For instance, outputted power from photovoltaic (PV) generations is not available during night and shading-effect times. It also varies from one instant to the other during the daytime with changes in solar irradiance and temperatures [3,4].
- Additionally, adding more RES installations in power grids leads to continuous reductions of power systems’ inertia. The inertia is the determining factor of grid stability and robustness. The main reason behind reduced values of inertia is the characteristics of outputted voltage/current of RESs, which cannot be connected directly to power grids. A power electronic power conversion unit is needed to provide adequate voltage/current and power quality waveforms to power grids. These structures are different from conventional energy systems which are based on synchronous generators and the conversion unit helps preserve system stability and robustness. This functionality does not exist in power electronics-based RES generations [5,6].
- Another uncertainty comes from the characteristics of modern connected loads. They are subject to various changes in large steps. Thence, jointly with uncertain RES generation, modern power grids can exhibit severe instabilities and improper responses with step changes in loads/generation and their associated imbalance [7].
- Energy storage systems (ESSs) have become essential for modern power grid with RES power’s variations. They can be used for storing/supplying energy based on the variations in generation/load imbalance. Thence, proper control and management algorithms are needed to provide better utilization of ESSs and to provide support of modern power grids [8].
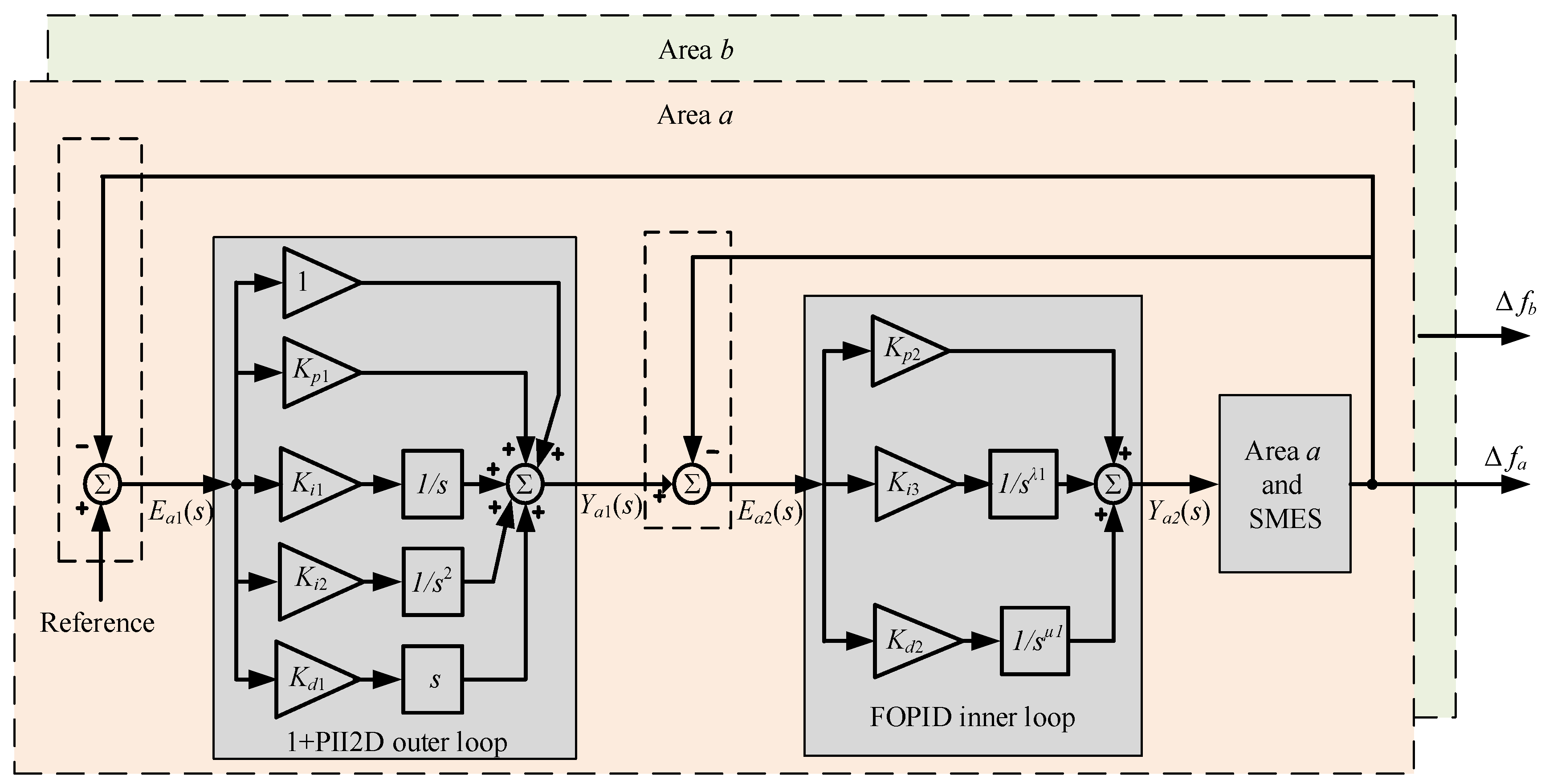
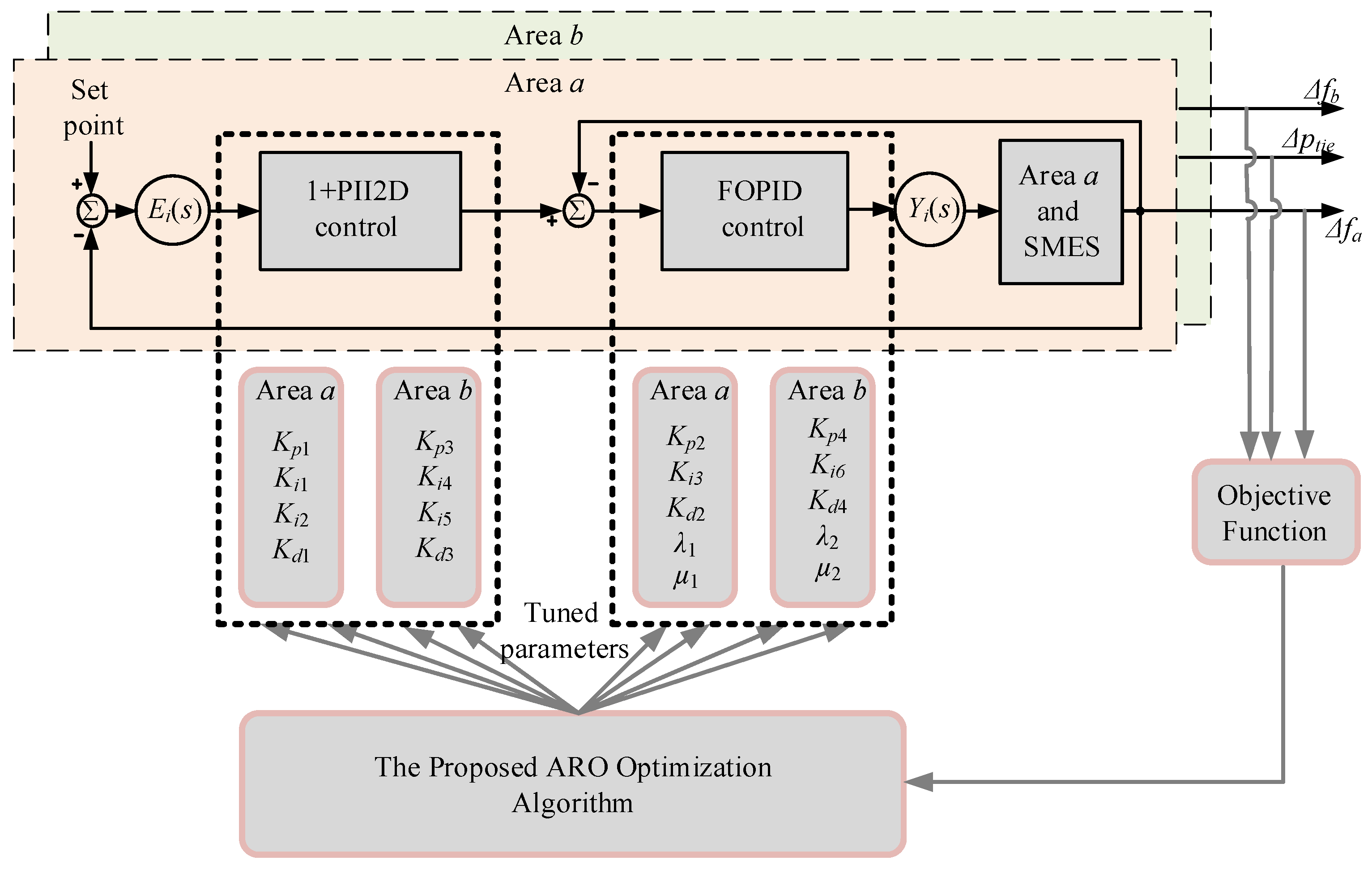
- A robust new improved hybrid controller for LFC is proposed in this paper for maintaining power grid stability and for improving frequency response behavior. The proposed LFC is constructed through using the one plus proportional integral double-integral derivative (1+PII2D) cascaded with fractional order proportional-integral-derivative (FOPID), namely, the proposed 1+PII2D/FOPID controller.
- The proposed cascaded 1+PII2D/FOPID has two loops; the outer loop uses area control errors (ACE) to mitigate slow disturbances in each area, whereas the inner loop uses a frequency measurement signal to damp fast frequency fluctuations in each area. Therefore, the proposed cascaded 1+PII2D/FOPID provides enhanced rejection possibility of disturbances.
- Application of recently presented powerful artificial rabbits optimizers (ARO) algorithm for designing the proposed cascaded 1+PII2D/FOPID LFC method. The ARO optimizer finds all the tunable parameters in a simultaneous manner for guaranteeing the best frequency response behavior in all areas.
- The effects of employing SMES and their contribution in regulating grid frequency response are studied and discussed in this paper. The behavior of real wind and PV profiles jointly with different domestic and industrial load profiles are considered in this paper.
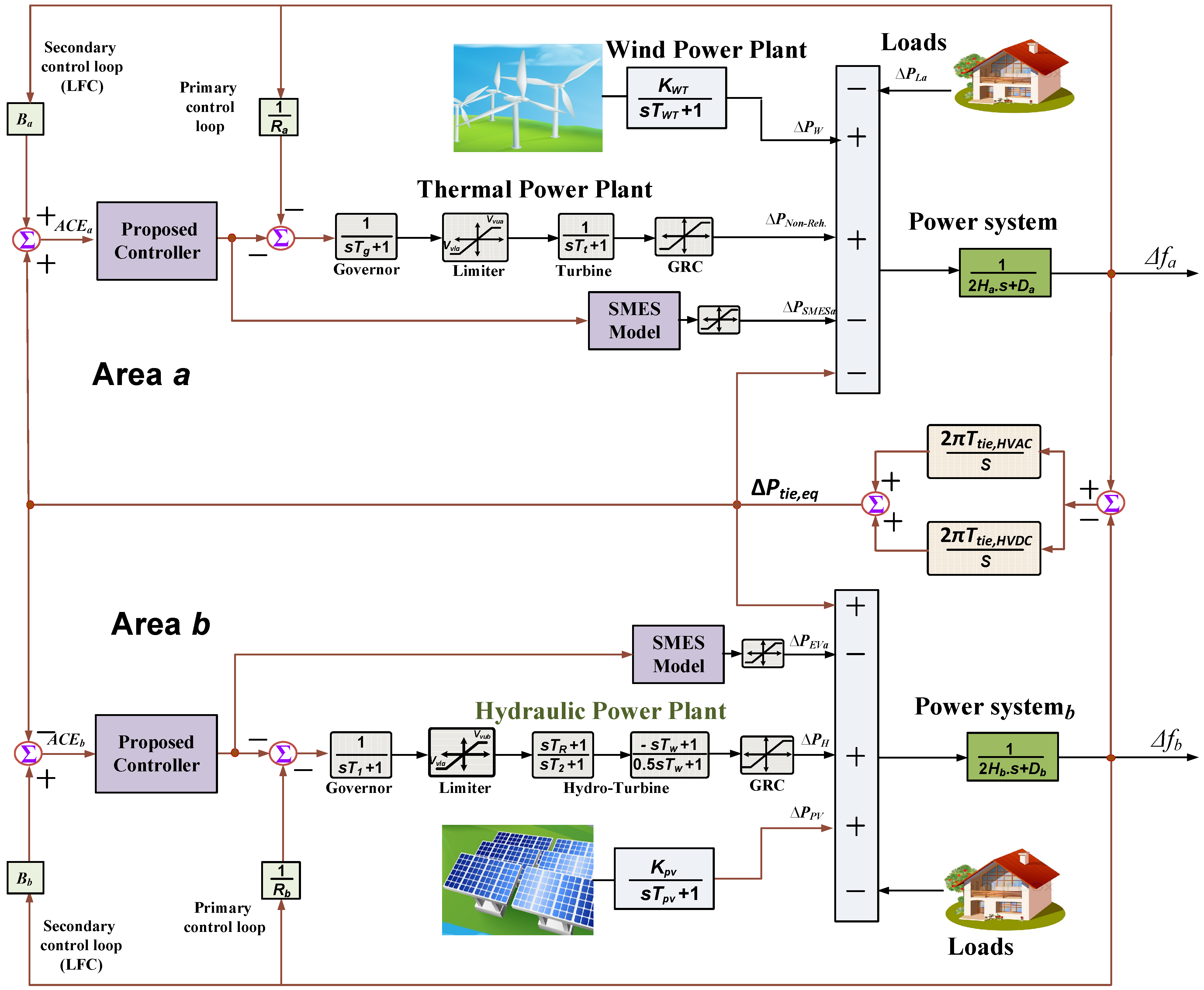
2. Mathematical Description of Power Grid Elements
2.1. Power Grid Description
2.2. Dynamic Models for Generation Units
2.3. SMES Modelling
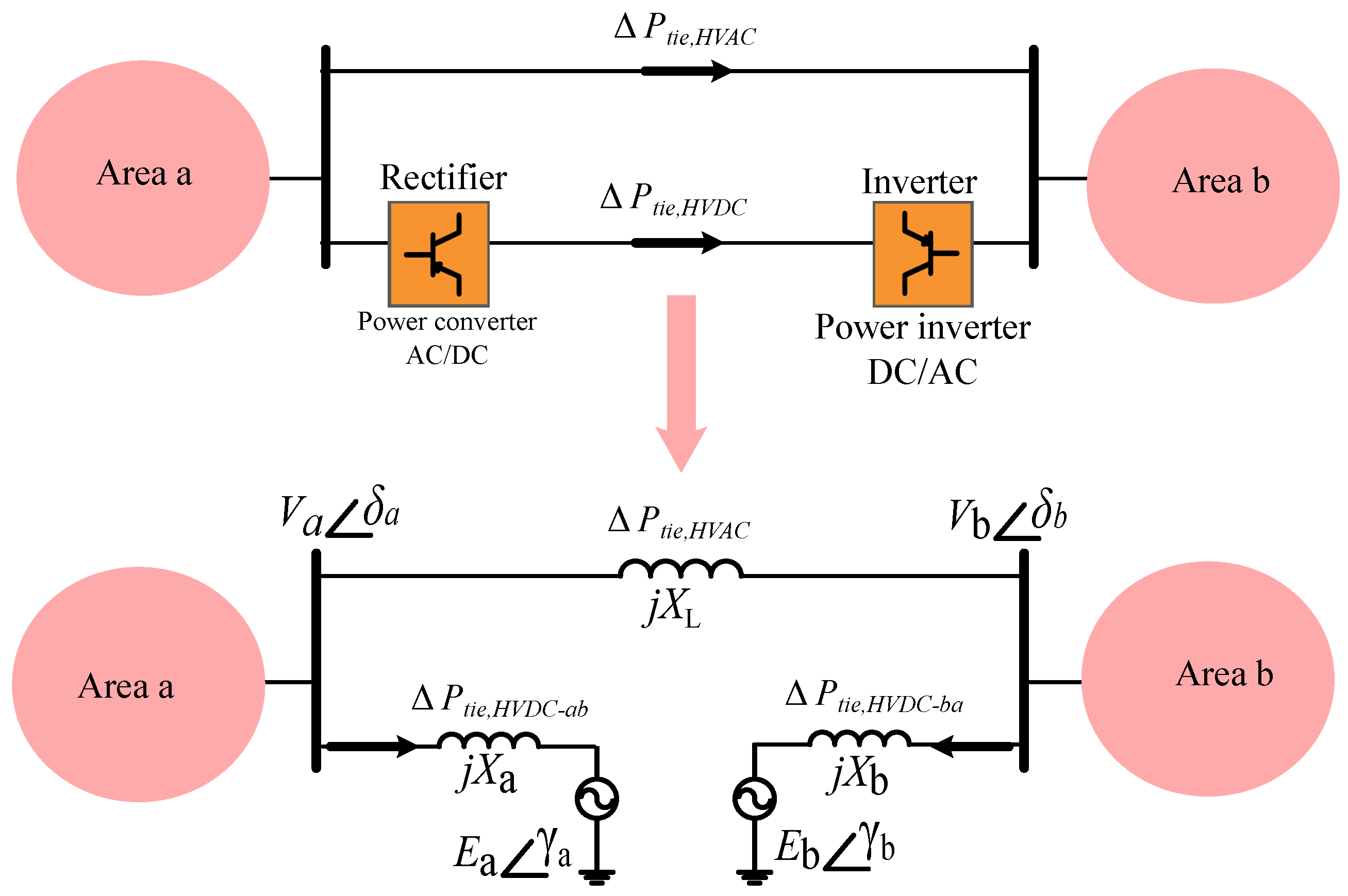
2.4. Hybrid HVDC/HVAC Line Model
2.5. Complete Grid System Model
3. LFC Schemes in Literature and FO Operator Modeling
3.1. LFC Overview in Literature
3.2. FO Operator Modeling
4. Proposed 1+PII2D/FOPID Controller and ARO Algorithm
4.1. Proposed 1+PII2D/FOPID LFC
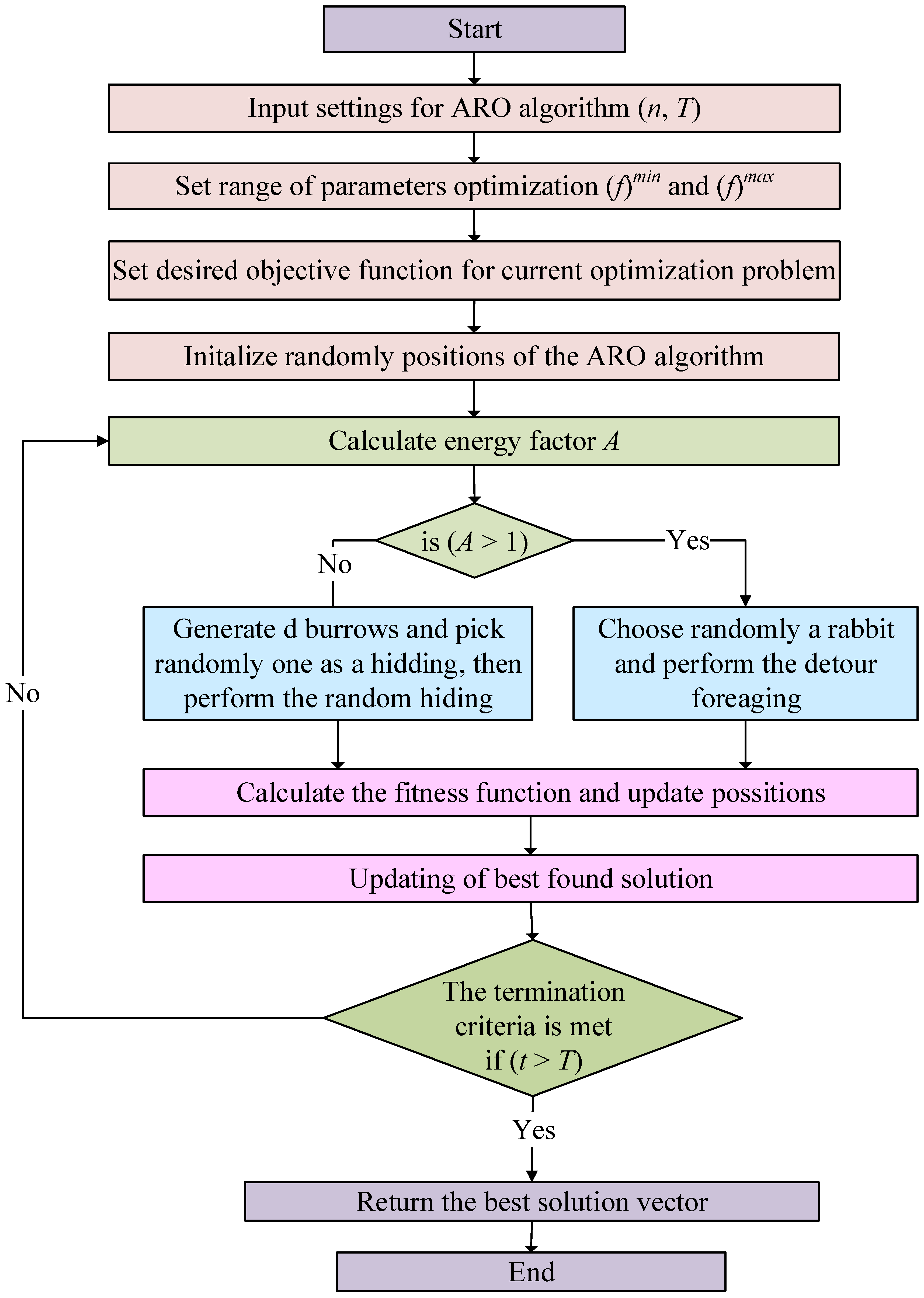
4.2. Proposed ARO Method
- Detour Foraging: It represents the exploration stage of ARO algorithm, in which rabbits search for their food far away from their shelter. In the ARO algorithm, each rabbit is considered as having its arena and food with a number d of own holes. The rabbit can move arbitrarily to the other existing arenas for hunting food. ITs numerical prototype representation of exploration phase for each rabbit can be expressed as [58]:where stands for candidate locations when rabbit is at time, stands for location of rabbit at time , n stands for rabbits’ population size, R represents an running operator, function is rounding value at nearest integer value, represents random number between (0, 1), and is subjected to standard normal distributions. The calculation of R is performed as [59]:where L stands for running length, whereas c stands for mapping vector. L is determined as:where stands for random number between (0,1). The value of is determined as [60]:where d stands for problem dimension, and stands for random number between (0, 1). Whereas the value of g is determined as [58]:where stands for randomizing permutation of integers from 1 to d.
- Arbitrary hiding: It represents the exploitation phase of ARO algorithm. With individual repetition in ARO algorithm, rabbits constantly produce d hideaways along individual dimensions of hunting area. They continually arbitrarily select single hole from all available holes for hiding themselves to lessen likelihood being hunted. In which, the hole for rabbit is determined by [60]:where H stands for hiding parameter, and i = 1, …, n and j =1, …, d. The value of H is determined as [61]:where stands for random number between (0, 1).The determination of arbitrary hiding approaches is numerically expressed as [58]:where is a randomly selected burrow for hiding from its own d burrow, stands for random number between (0, 1). After a complete cycle of the explorations and exploitations process, the rabbit’s spot is updated through [59]:
- Energy constriction: It represents the change process from the exploration to the exploitation phase. The rabbits are able to undergo exploration during the first phase, and are followed by the exploitation process during the next phase. These different searching processes are due to rabbits’ energy loss over the due course of time. The energy matter can be designed through using the following [58]:
4.3. Optimization of Parameters
5. Results and Discussions
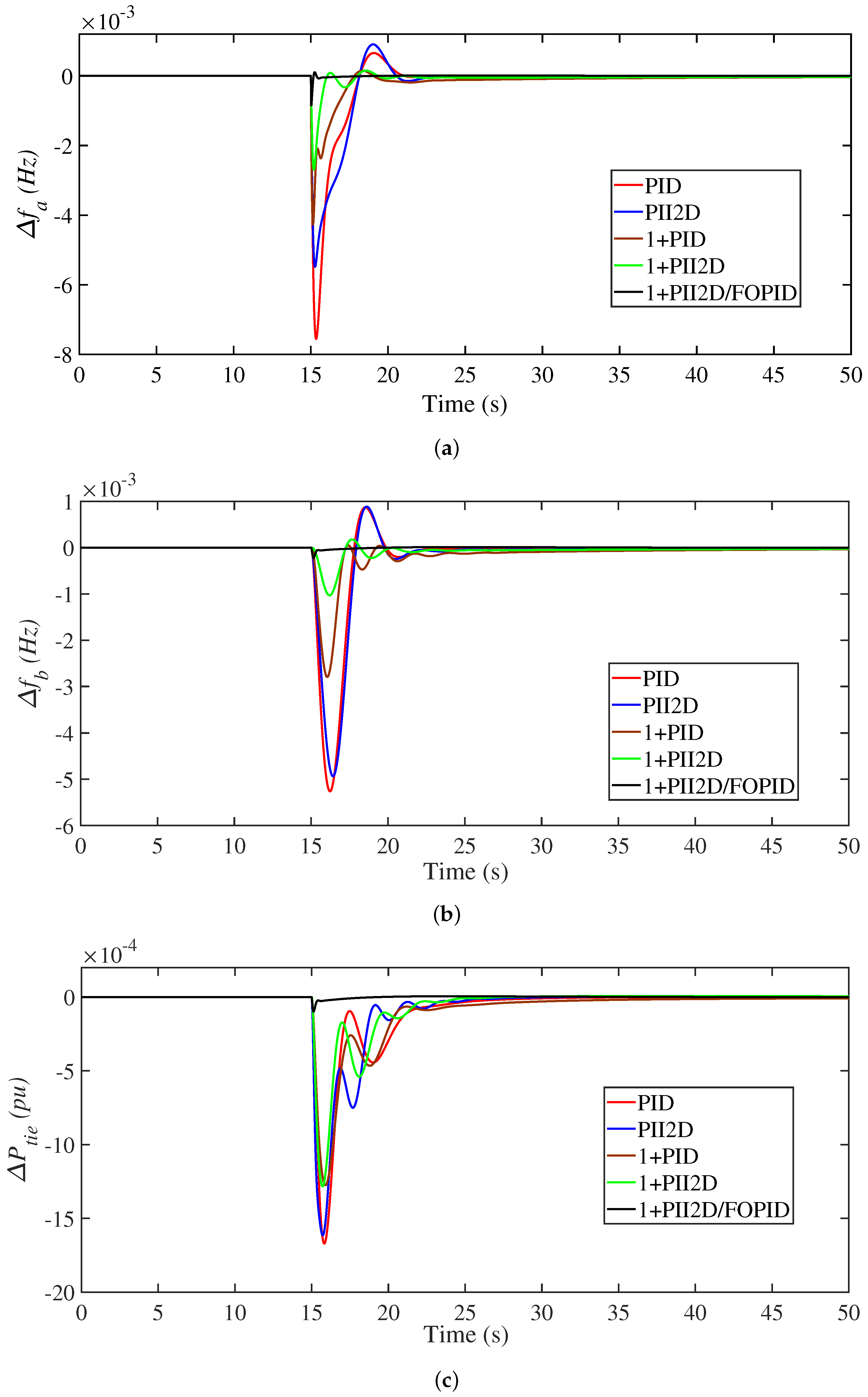
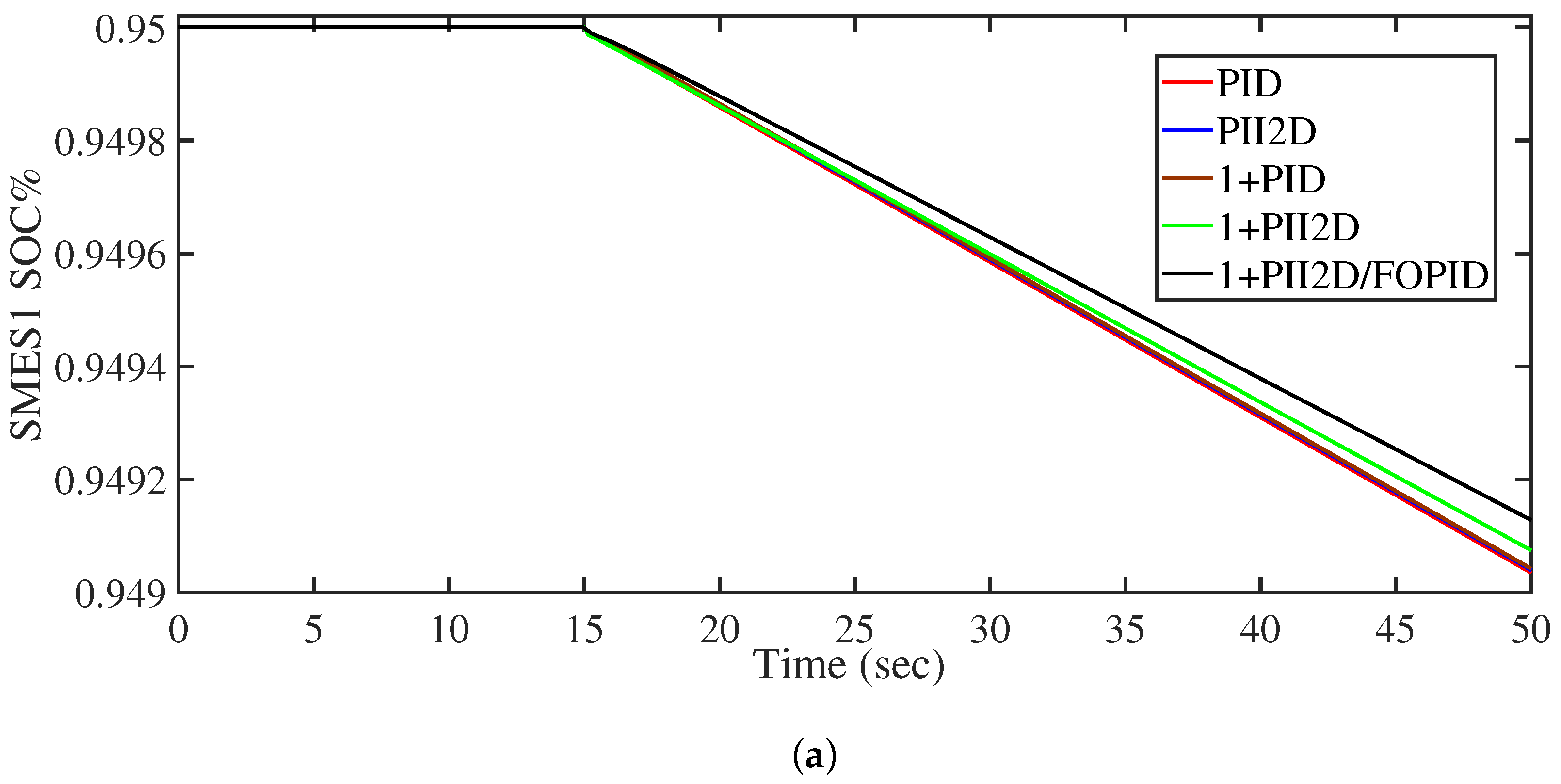
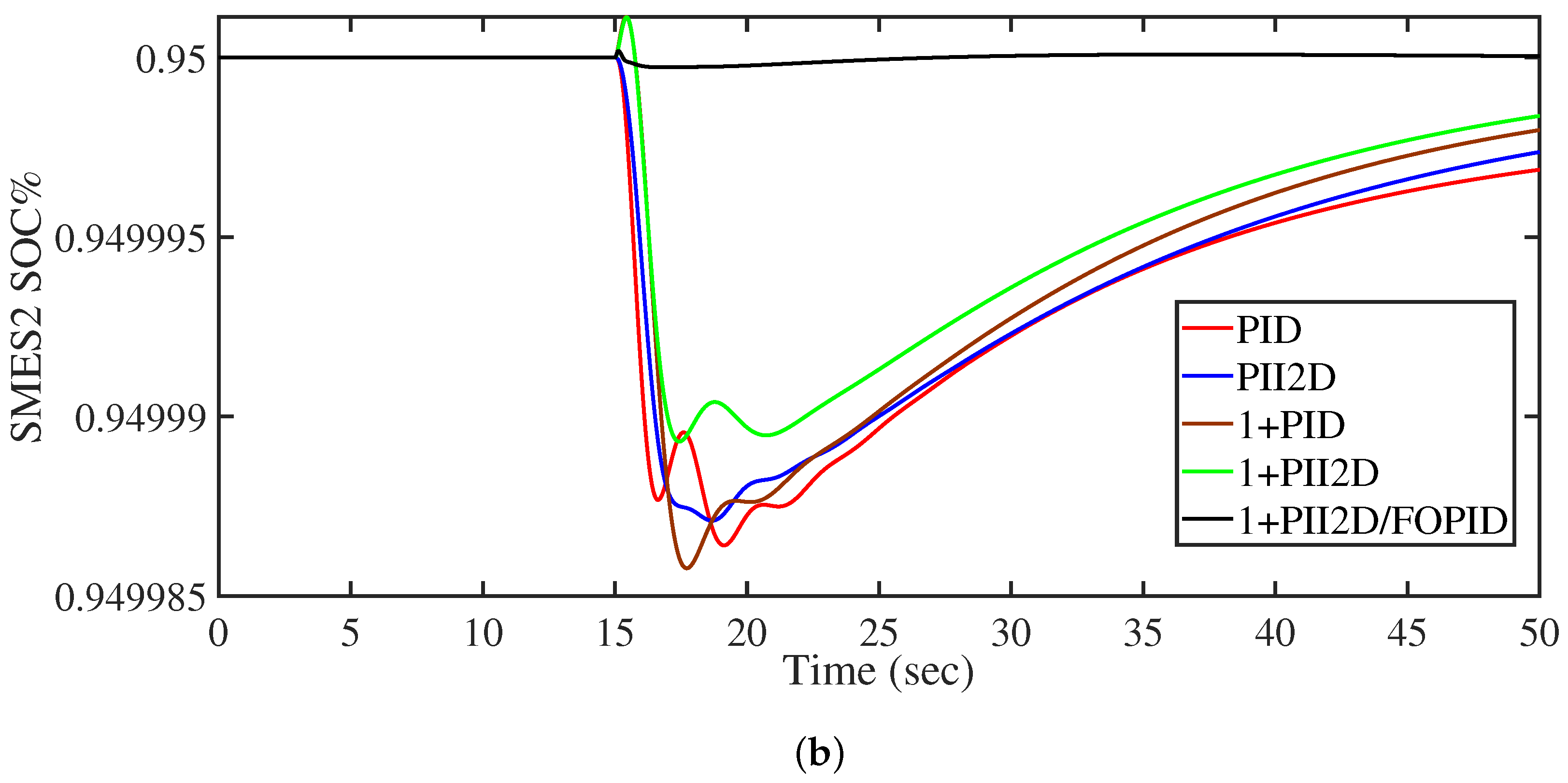
- Scenario 1: Action of step load change (SLC) with HVDC link.
- Scenario 2: Action of step load change (SLC) without HVDC link.
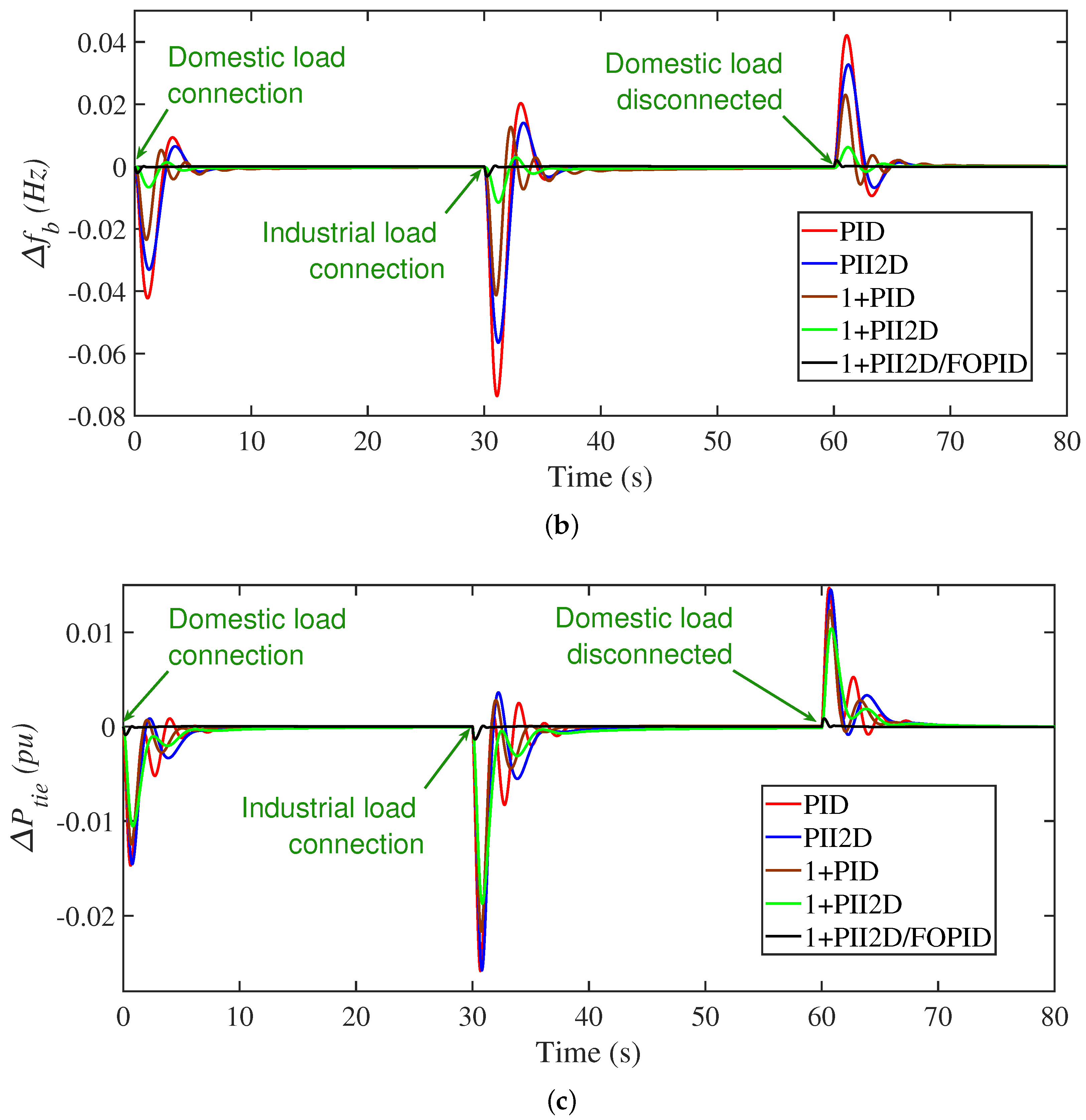
- Scenario 3: Action of the domestic and industrial loads.
- Scenario 4: Action of the PV fluctuations.
- Scenario 5: Action of wind generation fluctuations.
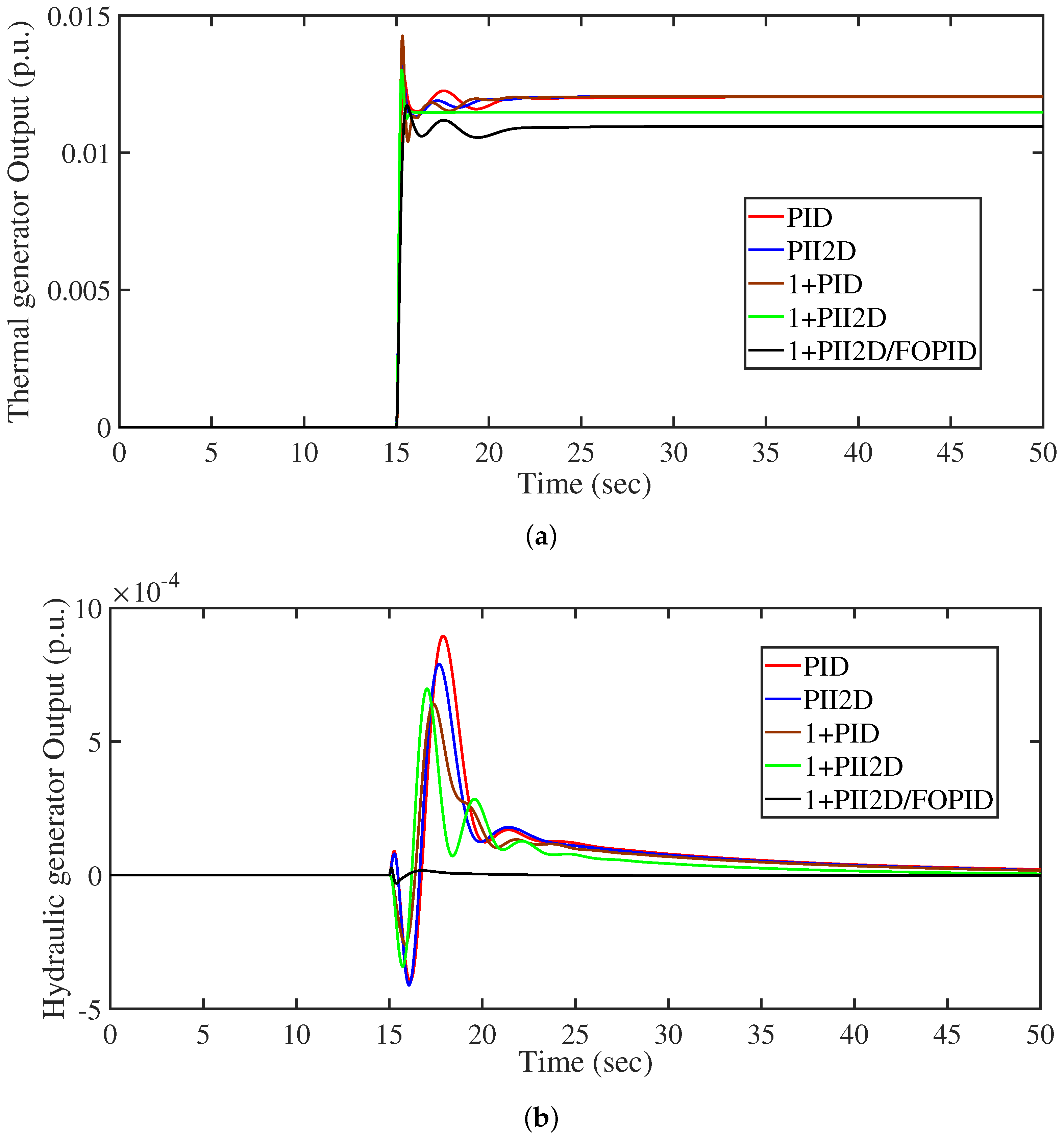
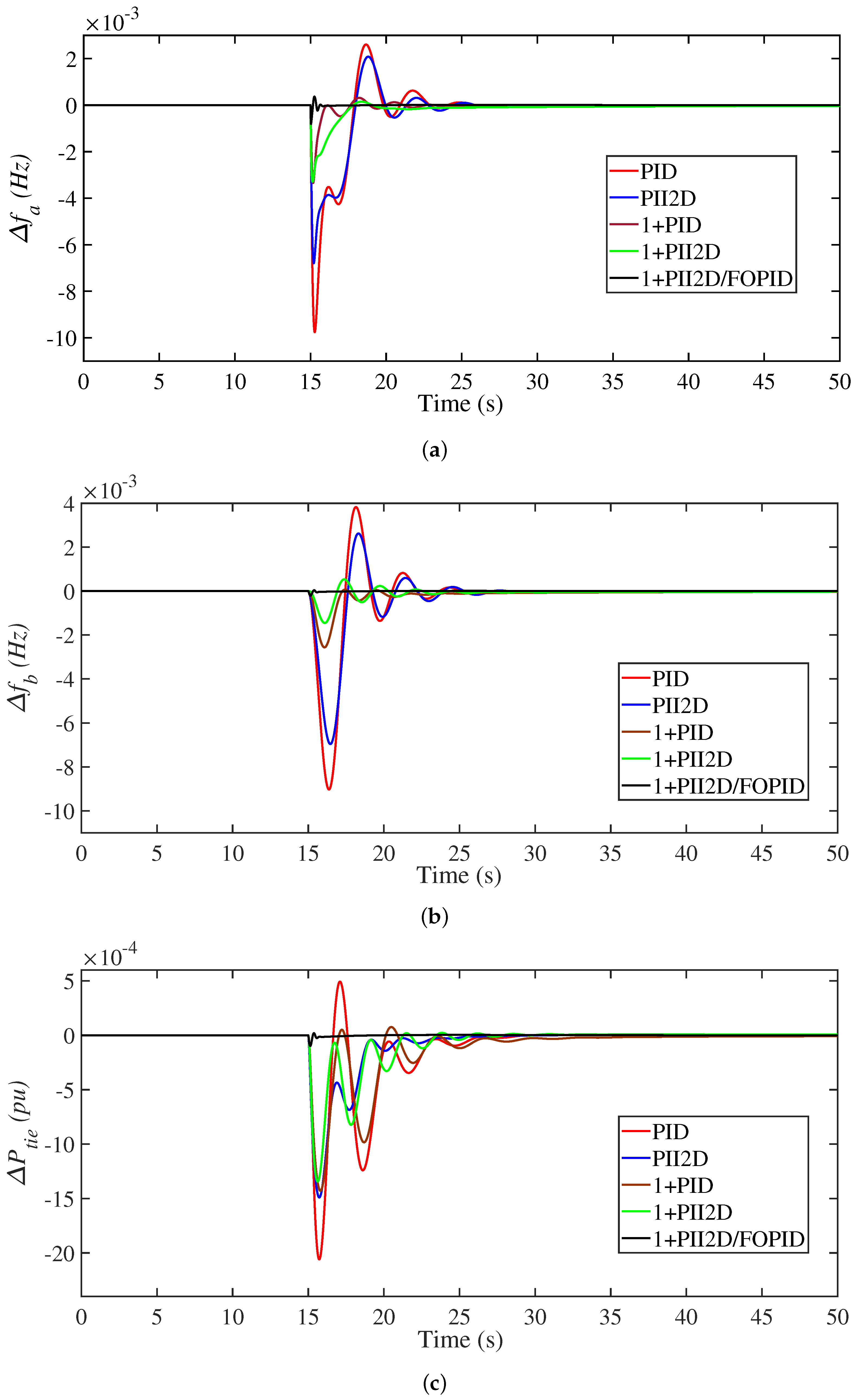
5.1. Scenario No. 1: Impact of SLC with HVDC Link
5.2. Scenario No. 2: Impact of SLC without HVDC Link
5.3. Scenario No. 3: The Impact of Domestic and Industrial Loads
5.4. Scenario No. 4: The Impact of the PV Fluctuations
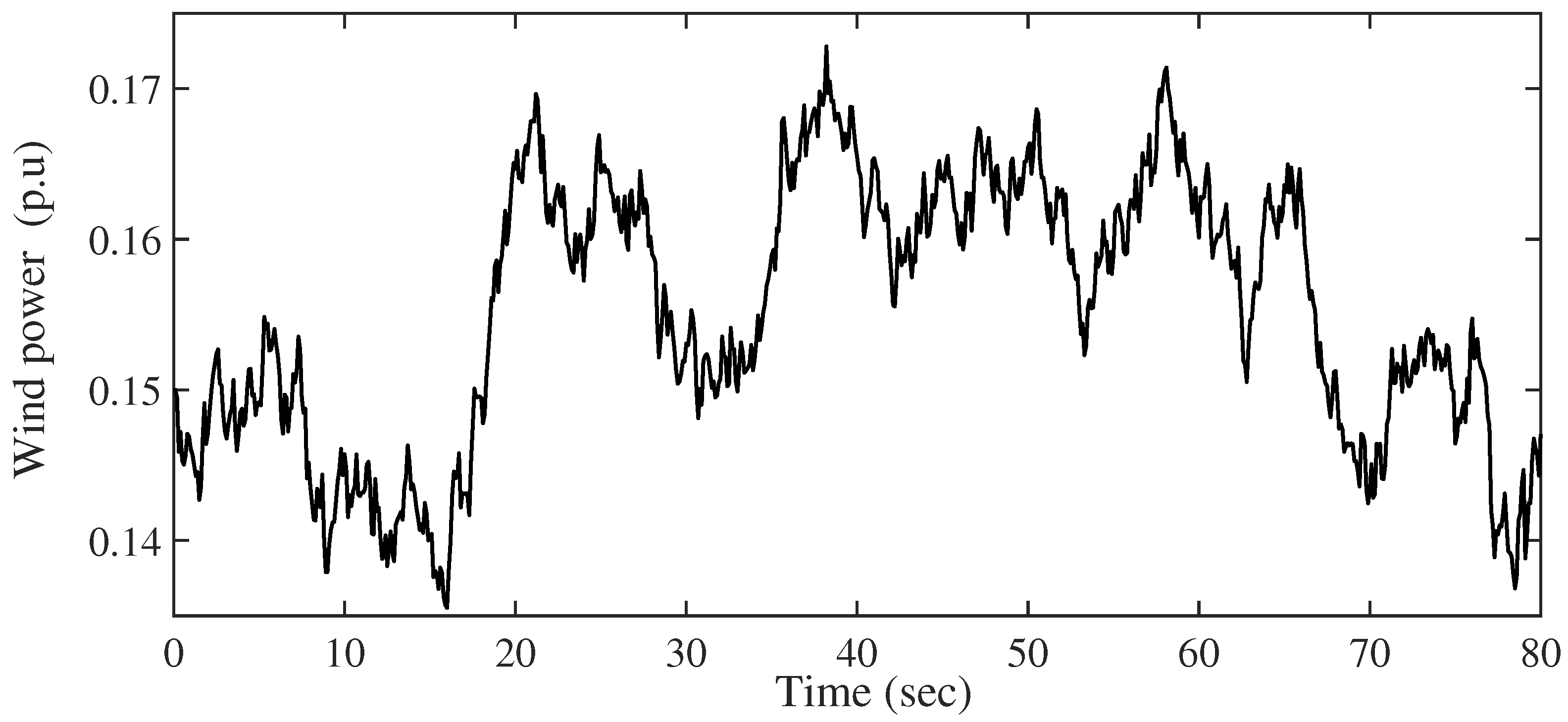
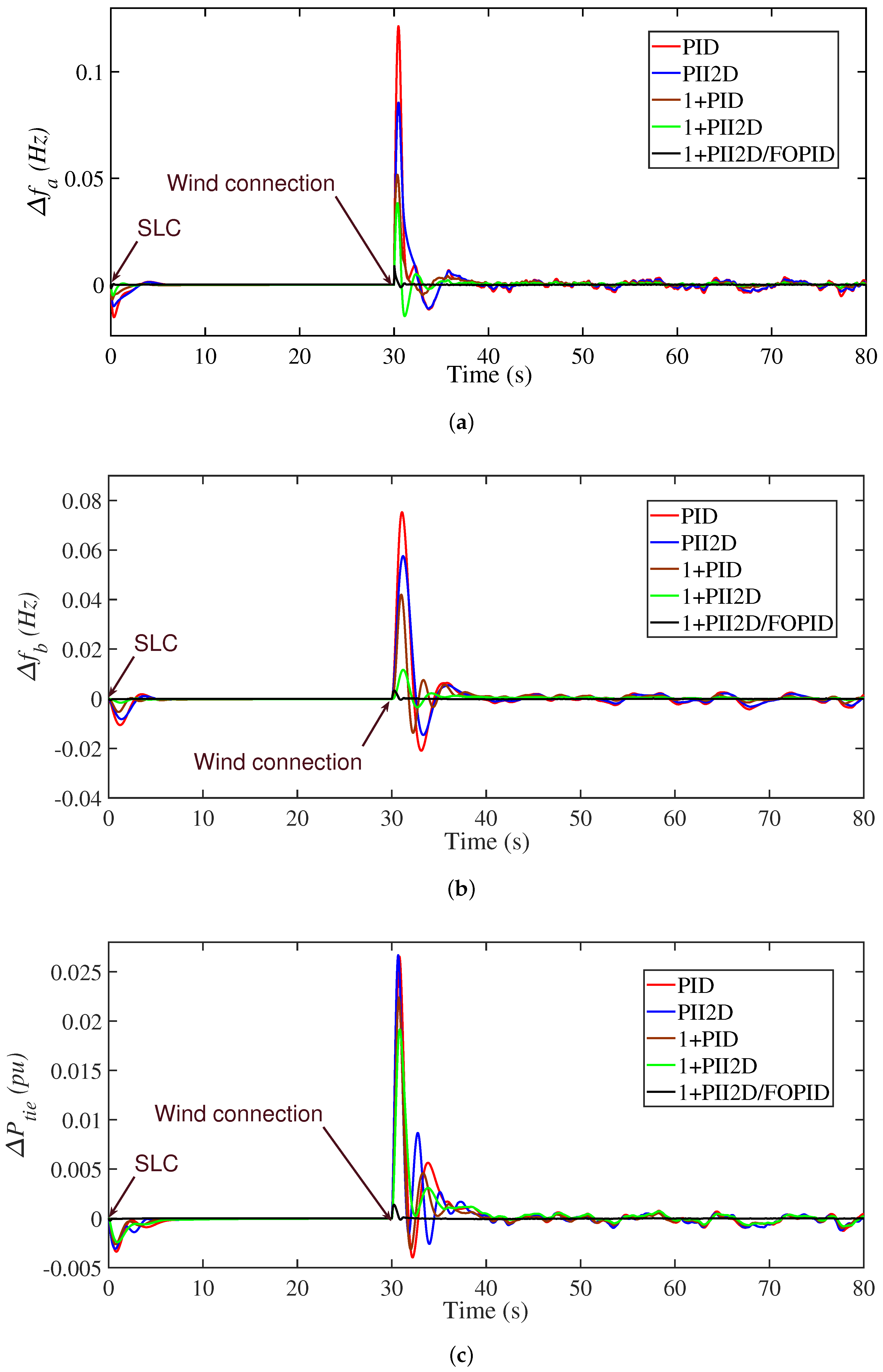
5.5. Scenario No. 5: The Impact of Wind Generation Fluctuations
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Said, S.M.; Aly, M.; Balint, H. An Efficient Reactive Power Dispatch Method for Hybrid Photovoltaic and Superconducting Magnetic Energy Storage Inverters in Utility Grids. IEEE Access 2020, 8, 183708–183721. [Google Scholar] [CrossRef]
- Maghami, M.R.; Mutambara, A.G.O. Challenges associated with Hybrid Energy Systems: An artificial intelligence solution. Energy Rep. 2023, 9, 924–940. [Google Scholar] [CrossRef]
- Said, S.M.; Aly, M.; Hartmann, B.; Mohamed, E.A. Coordinated fuzzy logic-based virtual inertia controller and frequency relay scheme for reliable operation of low-inertia power system. IET Renew. Power Gener. 2021, 15, 1286–1300. [Google Scholar] [CrossRef]
- Rameshar, V.; Sharma, G.; Bokoro, P.N.; Çelik, E. Frequency Support Studies of a Diesel–Wind Generation System Using Snake Optimizer-Oriented PID with UC and RFB. Energies 2023, 16, 3417. [Google Scholar] [CrossRef]
- Kez, D.A.; Foley, A.M.; Ahmed, F.; Morrow, D.J. Overview of frequency control techniques in power systems with high inverter-based resources: Challenges and mitigation measures. IET Smart Grid 2023. [Google Scholar] [CrossRef]
- Singh, B.; Slowik, A.; Bishnoi, S.K. Review on Soft Computing-Based Controllers for Frequency Regulation of Diverse Traditional, Hybrid, and Future Power Systems. Energies 2023, 16, 1917. [Google Scholar] [CrossRef]
- Oshnoei, S.; Oshnoei, A.; Mosallanejad, A.; Haghjoo, F. Contribution of GCSC to regulate the frequency in multi-area power systems considering time delays: A new control outline based on fractional order controllers. Int. J. Electr. Power Energy Syst. 2020, 123, 106197. [Google Scholar] [CrossRef]
- Elkasem, A.H.; Khamies, M.; Hassan, M.H.; Nasrat, L.; Kamel, S. Utilizing controlled plug-in electric vehicles to improve hybrid power grid frequency regulation considering high renewable energy penetration. Int. J. Electr. Power Energy Syst. 2023, 152, 109251. [Google Scholar] [CrossRef]
- Aly, M.; Mohamed, E.A.; Noman, A.M.; Ahmed, E.M.; El-Sousy, F.F.M.; Watanabe, M. Optimized Non-Integer Load Frequency Control Scheme for Interconnected Microgrids in Remote Areas with High Renewable Energy and Electric Vehicle Penetrations. Mathematics 2023, 11, 2080. [Google Scholar] [CrossRef]
- Said, S.M.; Mohamed, E.A.; Aly, M.; Ahmed, E.M. Enhancement of load frequency control in interconnected microgrids by SMES. In Superconducting Magnetic Energy Storage in Power Grids; Institution of Engineering and Technology: London, UK, 2022; pp. 111–148. [Google Scholar] [CrossRef]
- Zhang, C.; Wang, S.; Zhao, Q. Distributed economic MPC for LFC of multi-area power system with wind power plants in power market environment. Int. J. Electr. Power Energy Syst. 2021, 126, 106548. [Google Scholar] [CrossRef]
- Fathy, A.; Kassem, A.M. Antlion optimizer-ANFIS load frequency control for multi-interconnected plants comprising photovoltaic and wind turbine. ISA Trans. 2019, 87, 282–296. [Google Scholar] [CrossRef]
- Patowary, M.; Panda, G.; Naidu, B.R.; Deka, B.C. ANN-based adaptive current controller for on-grid DG system to meet frequency deviation and transient load challenges with hardware implementation. IET Renew. Power Gener. 2017, 12, 61–71. [Google Scholar] [CrossRef]
- Ali, M.; Kotb, H.; AboRas, M.K.; Abbasy, H.N. Frequency regulation of hybrid multi-area power system using wild horse optimizer based new combined Fuzzy Fractional-Order PI and TID controllers. Alex. Eng. J. 2022, 61, 12187–12210. [Google Scholar] [CrossRef]
- Yakout, A.H.; Kotb, H.; Hasanien, H.M.; Aboras, K.M. Optimal Fuzzy PIDF Load Frequency Controller for Hybrid Microgrid System Using Marine Predator Algorithm. IEEE Access 2021, 9, 54220–54232. [Google Scholar] [CrossRef]
- Rajesh, K.S.; Dash, S.S. Load frequency control of autonomous power system using adaptive fuzzy based PID controller optimized on improved sine cosine algorithm. J. Ambient. Intell. Humaniz. Comput. 2018, 10, 2361–2373. [Google Scholar] [CrossRef]
- Mishra, D.; Sahu, P.C.; Prusty, R.C.; Panda, S. A fuzzy adaptive fractional order-PID controller for frequency control of an islanded microgrid under stochastic wind/solar uncertainties. Int. J. Ambient. Energy 2021, 43, 4602–4611. [Google Scholar] [CrossRef]
- Fernández-Guillamón, A.; Gómez-Lázaro, E.; Muljadi, E.; Molina-García, Á. Power systems with high renewable energy sources: A review of inertia and frequency control strategies over time. Renew. Sustain. Energy Rev. 2019, 115, 109369. [Google Scholar] [CrossRef]
- Pandey, S.K.; Mohanty, S.R.; Kishor, N. A literature survey on load–frequency control for conventional and distribution generation power systems. Renew. Sustain. Energy Rev. 2013, 25, 318–334. [Google Scholar] [CrossRef]
- Yousri, D.; Babu, T.S.; Fathy, A. Recent methodology based Harris Hawks optimizer for designing load frequency control incorporated in multi-interconnected renewable energy plants. Sustain. Energy Grids Netw. 2020, 22, 100352. [Google Scholar] [CrossRef]
- Dahab, Y.A.; Abubakr, H.; Mohamed, T.H. Adaptive Load Frequency Control of Power Systems Using Electro-Search Optimization Supported by the Balloon Effect. IEEE Access 2020, 8, 7408–7422. [Google Scholar] [CrossRef]
- Shabani, H.; Vahidi, B.; Ebrahimpour, M. A robust PID controller based on imperialist competitive algorithm for load-frequency control of power systems. ISA Trans. 2013, 52, 88–95. [Google Scholar] [CrossRef]
- El Yakine Kouba, N.; Menaa, M.; Hasni, M.; Boudour, M. Optimal load frequency control based on artificial bee colony optimization applied to single, two and multi-area interconnected power systems. In Proceedings of the 2015 3rd International Conference on Control, Engineering & Information Technology (CEIT), Tlemcen, Algeria, 25–27 May 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Ewais, A.M.; Elnoby, A.M.; Mohamed, T.H.; Mahmoud, M.M.; Qudaih, Y.; Hassan, A.M. Adaptive frequency control in smart microgrid using controlled loads supported by real-time implementation. PLoS ONE 2023, 18, e0283561. [Google Scholar] [CrossRef] [PubMed]
- Youssef, A.R.; Mallah, M.; Ali, A.; Shaaban, M.F.; Mohamed, E.E.M. Enhancement of Microgrid Frequency Stability Based on the Combined Power-to-Hydrogen-to-Power Technology under High Penetration Renewable Units. Energies 2023, 16, 3377. [Google Scholar] [CrossRef]
- Almasoudi, F.M.; Bakeer, A.; Magdy, G.; Alatawi, K.S.S.; Shabib, G.; Lakhouit, A.; Alomrani, S.E. Nonlinear coordination strategy between renewable energy sources and fuel cells for frequency regulation of hybrid power systems. Ain Shams Eng. J. 2023, 102399. [Google Scholar] [CrossRef]
- Bakeer, M.; Magdy, G.; Bakeer, A.; Aly, M.M. Resilient virtual synchronous generator approach using DC-link capacitor energy for frequency support of interconnected renewable power systems. J. Energy Storage 2023, 65, 107230. [Google Scholar] [CrossRef]
- Khalil, A.E.; Boghdady, T.A.; Alham, M.H.; Ibrahim, D.K. Enhancing the Conventional Controllers for Load Frequency Control of Isolated Microgrids Using Proposed Multi-Objective Formulation via Artificial Rabbits Optimization Algorithm. IEEE Access 2023, 11, 3472–3493. [Google Scholar] [CrossRef]
- Neamah, N.M.; AbuHussein, A.; Hossam-Eldin, A.A.; Alghamdi, S.; AboRas, K.M. Improvement of Frequency Regulation of a Wind-Integrated Power System Based on a PD-PIDA Controlled STATCOM Tuned by the Artificial Rabbits Optimizer. IEEE Access 2023, 11, 55716–55735. [Google Scholar] [CrossRef]
- AboRas, K.M.; Ragab, M.; Shouran, M.; Alghamdi, S.; Kotb, H. Voltage and frequency regulation in smart grids via a unique Fuzzy PIDD2 controller optimized by Gradient-Based Optimization algorithm. Energy Rep. 2023, 9, 1201–1235. [Google Scholar] [CrossRef]
- Abid, S.; El-Rifaie, A.M.; Elshahed, M.; Ginidi, A.R.; Shaheen, A.M.; Moustafa, G.; Tolba, M.A. Development of Slime Mold Optimizer with Application for Tuning Cascaded PD-PI Controller to Enhance Frequency Stability in Power Systems. Mathematics 2023, 11, 1796. [Google Scholar] [CrossRef]
- Sahu, R.; Panda, S.; Rout, U.K.; Sahoo, D. Teaching learning based optimization algorithm for automatic generation control of power system using 2-DOF PID controller. Int. J. Electr. Power Energy Syst. 2016, 77, 287–301. [Google Scholar] [CrossRef]
- Dash, P.; Saikia, L.; Sinha, N. Automatic generation control of multi area thermal system using Bat algorithm optimized PD–PID cascade controller. Int. J. Electr. Power Energy Syst. 2015, 68, 364–372. [Google Scholar] [CrossRef]
- Zhang, G.; Daraz, A.; Khan, I.A.; Basit, A.; Khan, M.I.; Ullah, M. Driver Training Based Optimized Fractional Order PI-PDF Controller for Frequency Stabilization of Diverse Hybrid Power System. Fractal Fract. 2023, 7, 315. [Google Scholar] [CrossRef]
- Ayas, M.S.; Sahin, E. FOPID controller with fractional filter for an automatic voltage regulator. Comput. Electr. Eng. 2021, 90, 106895. [Google Scholar] [CrossRef]
- Fathy, A.; Alharbi, A.G. Recent Approach Based Movable Damped Wave Algorithm for Designing Fractional-Order PID Load Frequency Control Installed in Multi-Interconnected Plants With Renewable Energy. IEEE Access 2021, 9, 71072–71089. [Google Scholar] [CrossRef]
- Zaheeruddin; Singh, K. Load frequency regulation by de-loaded tidal turbine power plant units using fractional fuzzy based PID droop controller. Appl. Soft Comput. 2020, 92, 106338. [Google Scholar] [CrossRef]
- Ahmed, E.M.; Mohamed, E.A.; Elmelegi, A.; Aly, M.; Elbaksawi, O. Optimum Modified Fractional Order Controller for Future Electric Vehicles and Renewable Energy-Based Interconnected Power Systems. IEEE Access 2021, 9, 29993–30010. [Google Scholar] [CrossRef]
- Almasoudi, F.M.; Magdy, G.; Bakeer, A.; Alatawi, K.S.S.; Rihan, M. A New Load Frequency Control Technique for Hybrid Maritime Microgrids: Sophisticated Structure of Fractional-Order PIDA Controller. Fractal Fract. 2023, 7, 435. [Google Scholar] [CrossRef]
- Zaid, S.A.; Bakeer, A.; Magdy, G.; Albalawi, H.; Kassem, A.M.; El-Shimy, M.E.; AbdelMeguid, H.; Manqarah, B. A New Intelligent Fractional-Order Load Frequency Control for Interconnected Modern Power Systems with Virtual Inertia Control. Fractal Fract. 2023, 7, 62. [Google Scholar] [CrossRef]
- Aly, M.; Mohamed, E.A.; Ramadan, H.A.; Elmelegi, A.; Said, S.M.; Ahmed, E.M.; Shawky, A.; Rodriguez, J. Optimized LFC Design for Future Low-Inertia Power Electronics Based Modern Power Grids. In Proceedings of the 2023 IEEE Conference on Power Electronics and Renewable Energy (CPERE), Luxor, Egypt, 19–21 February 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Ahmed, E.M.; Selim, A.; Mohamed, E.A.; Aly, M.; Alnuman, H.; Ramadan, H.A. Modified manta ray foraging optimization algorithm based improved load frequency controller for interconnected microgrids. IET Renew. Power Gener. 2022, 16, 3587–3613. [Google Scholar] [CrossRef]
- Mohamed, E.A.; Aly, M.; Elmelegi, A.; Ahmed, E.M.; Watanabe, M.; Said, S.M. Enhancement the Frequency Stability and Protection of Interconnected Microgrid Systems Using Advanced Hybrid Fractional Order Controller. IEEE Access 2022, 10, 111936–111961. [Google Scholar] [CrossRef]
- Oshnoei, S.; Aghamohammadi, M.; Oshnoei, S.; Oshnoei, A.; Mohammadi-Ivatloo, B. Provision of Frequency Stability of an Islanded Microgrid Using a Novel Virtual Inertia Control and a Fractional Order Cascade Controller. Energies 2021, 14, 4152. [Google Scholar] [CrossRef]
- Arya, Y.; Kumar, N.; Dahiya, P.; Sharma, G.; Çelik, E.; Dhundhara, S.; Sharma, M. Cascade-IλDμN controller design for AGC of thermal and hydro-thermal power systems integrated with renewable energy sources. IET Renew. Power Gener. 2021. [Google Scholar] [CrossRef]
- Malik, S.; Suhag, S. A Novel SSA Tuned PI-TDF Control Scheme for Mitigation of Frequency Excursions in Hybrid Power System. Smart Sci. 2020, 8, 202–218. [Google Scholar] [CrossRef]
- Babu, N.R.; Bhagat, S.K.; Chiranjeevi, T.; Pushkarna, M.; Saha, A.; Kotb, H.; AboRas, K.M.; Alsaif, F.; Alsulamy, S.; Ghadi, Y.Y.; et al. Frequency Control of a Realistic Dish Stirling Solar Thermal System and Accurate HVDC Models Using a Cascaded FOPI-IDDN-Based Crow Search Algorithm. Int. J. Energy Res. 2023, 2023, 9976375. [Google Scholar] [CrossRef]
- El-Sousy, F.F.M.; Alqahtani, M.H.; Aljumah, A.S.; Aly, M.; Almutairi, S.Z.; Mohamed, E.A. Design Optimization of Improved Fractional-Order Cascaded Frequency Controllers for Electric Vehicles and Electrical Power Grids Utilizing Renewable Energy Sources. Fractal Fract. 2023, 7, 603. [Google Scholar] [CrossRef]
- Ahmed, E.M.; Mohamed, E.A.; Selim, A.; Aly, M.; Alsadi, A.; Alhosaini, W.; Alnuman, H.; Ramadan, H.A. Improving load frequency control performance in interconnected power systems with a new optimal high degree of freedom cascaded FOTPID-TIDF controller. Ain Shams Eng. J. 2023, 14, 102207. [Google Scholar] [CrossRef]
- Mohamed, E.A.; Ahmed, E.M.; Elmelegi, A.; Aly, M.; Elbaksawi, O.; Mohamed, A.A.A. An Optimized Hybrid Fractional Order Controller for Frequency Regulation in Multi-area Power Systems. IEEE Access 2020, 8, 213899–213915. [Google Scholar] [CrossRef]
- Elmelegi, A.; Mohamed, E.A.; Aly, M.; Ahmed, E.M.; Mohamed, A.A.A.; Elbaksawi, O. Optimized Tilt Fractional Order Cooperative Controllers for Preserving Frequency Stability in Renewable Energy-Based Power Systems. IEEE Access 2021, 9, 8261–8277. [Google Scholar] [CrossRef]
- Pathak, N.; Verma, A.; Bhatti, T.S.; Nasiruddin, I. Modeling of HVDC Tie Links and Their Utilization in AGC/LFC Operations of Multiarea Power Systems. IEEE Trans. Ind. Electron. 2019, 66, 2185–2197. [Google Scholar] [CrossRef]
- Micev, M.; Ćalasan, M.; Oliva, D. Fractional Order PID Controller Design for an AVR System Using Chaotic Yellow Saddle Goatfish Algorithm. Mathematics 2020, 8, 1182. [Google Scholar] [CrossRef]
- Motorga, R.; Mureșan, V.; Ungureșan, M.L.; Abrudean, M.; Vălean, H.; Clitan, I. Artificial Intelligence in Fractional-Order Systems Approximation with High Performances: Application in Modelling of an Isotopic Separation Process. Mathematics 2022, 10, 1459. [Google Scholar] [CrossRef]
- Dulf, E.H. Simplified Fractional Order Controller Design Algorithm. Mathematics 2019, 7, 1166. [Google Scholar] [CrossRef]
- Tejado, I.; Vinagre, B.; Traver, J.; Prieto-Arranz, J.; Nuevo-Gallardo, C. Back to Basics: Meaning of the Parameters of Fractional Order PID Controllers. Mathematics 2019, 7, 530. [Google Scholar] [CrossRef]
- Mihaly, V.; Şuşcă, M.; Dulf, E.H. μ-Synthesis FO-PID for Twin Rotor Aerodynamic System. Mathematics 2021, 9, 2504. [Google Scholar] [CrossRef]
- Wang, L.; Cao, Q.; Zhang, Z.; Mirjalili, S.; Zhao, W. Artificial rabbits optimization: A new bio-inspired meta-heuristic algorithm for solving engineering optimization problems. Eng. Appl. Artif. Intell. 2022, 114, 105082. [Google Scholar] [CrossRef]
- Elshahed, M.; Tolba, M.A.; El-Rifaie, A.M.; Ginidi, A.; Shaheen, A.; Mohamed, S.A. An Artificial Rabbits’ Optimization to Allocate PVSTATCOM for Ancillary Service Provision in Distribution Systems. Mathematics 2023, 11, 339. [Google Scholar] [CrossRef]
- Kumar, D.S.; Premkumar, M.; Kumar, C.; Muyeen, S. Optimal scheduling algorithm for residential building distributed energy source systems using Levy flight and chaos-assisted artificial rabbits optimizer. Energy Rep. 2023, 9, 5721–5740. [Google Scholar] [CrossRef]
- Cao, Q.; Wang, L.; Zhao, W.; Yuan, Z.; Liu, A.; Gao, Y.; Ye, R. Vibration State Identification of Hydraulic Units Based on Improved Artificial Rabbits Optimization Algorithm. Biomimetics 2023, 8, 243. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Controller | Algorithm | Category | Characteristics of Each Category |
|---|---|---|---|---|
| [20] | PI | HHO | Use simple control structures | |
| [21] | I | ESO with BE | IO-based | Are easy to implement |
| [22] | PID | ICA | LFC with | Lower control robustness with parameter uncertainty |
| [23] | PID | ABC | single input | Have low mitigation ability of disturbances |
| [24] | I | JBO | ||
| [25] | PID | – | ||
| [28] | PI, PID | ARO | ||
| [26] | Nonlinear PI | DO | ||
| [27] | I, PI | PSO | ||
| [30] | Fuzzy PIDD2 | GBO | ||
| [40] | iFOI | GWO | ||
| [35] | FOPID | SCA | Have more parameters to tune | |
| [36] | FOPID | MDWA | FO-based | Possess higher flexibility compared to IO ones |
| [37] | FOPIDF | ICA | LFC with | Have improved disturbance mitigation compared to IO |
| [38] | TFOID | AEO | single input | Have reduced rejection of existing disturbances |
| [50] | TID | MRFO | ||
| [39] | FOPIDA | GWO | ||
| [41] | TFOID | SMA | ||
| [42] | TFOID | CMRFO, WCMRFO | ||
| [43] | TFOID with PI | SMA | ||
| [31] | PD-PI | ESMOA | Possess high number of parameters to tune | |
| [32] | 2DOF PID | TLBO | Cascaded LFC | Have more flexibilities (degree of freedom) in design |
| [33] | PD-PID | BA | with multiple | Provide better disturbance mitigation due to using cascaded loops |
| [34] | PI-PDF | DTBO | inputs | can mitigate high as well as low frequency disturbances |
| [44] | 3DOF TID | SSA | Have better performance than single input LFC methods | |
| [45] | FO-IDF | ICA | ||
| [46] | PI-TDF | SSA | ||
| [29] | PD-PIDA (STATCOM) | ARO | ||
| [47] | FOPI-IDDF | CSA | ||
| [48] | 1+PD/FOPID | MRFO | ||
| [49] | 3DOF FOTPID-TIDF | SCMRFO | ||
| Proposed | cascaded 1+PII2D/FOPID | ARO | Cascaded FO LFC (multiple inputs) | A robust new improved hybrid controller The proposed cascaded 1+PII2D/FOPID has two loops that lead to having better rejection possibility of disturbances Applies the recently-presented powerful artificial rabbits optimizers (ARO) algorithm Studies the employment of SMES to contribute in frequency regulation using the proposed 1+PII2D/FOPID controller Studies the behavior of real wind and PV profiles with different domestic and industrial load profiles |
| Parameters | Symbols | Values | |
|---|---|---|---|
| Area | Area | ||
| Capacity ratings | (MW) | 1200 | 1200 |
| Droop constants | (Hz/MW) | 2.4 | 2.4 |
| Frequency bias values | (MW/Hz) | 0.4249 | 0.4249 |
| Minimum valve gates limit | (p.u.MW) | −0.5 | −0.5 |
| Maximum valve gates limit | (p.u.MW) | 0.5 | 0.5 |
| Time constants of thermal governors | (s) | 0.08 | - |
| Time constants of thermal turbines | (s) | 0.3 | - |
| Time constants of hydraulic governors | (s) | - | 41.6 |
| TC of transient droop (hydraulic) | (s) | - | 0.513 |
| Reset times of hydraulic governors | (s) | - | 5 |
| Water starting times of hydro turbines | (s) | - | 1 |
| Power systems’ inertia constants | (p.u.s) | 0.0833 | 0.0833 |
| Power systems’ damping coefficients | (p.u./Hz) | 0.00833 | 0.00833 |
| Time constants of PV | (s) | - | 1.3 |
| Gains of PV | (s) | - | 1 |
| Time constants of wind | (s) | 1.5 | - |
| Gains of wind | (s) | 1 | - |
| Time constants of SMES converters | (s) | 0.03 | 0.03 |
| Coils of SMES | (H) | 0.03 | 0.03 |
| SMES gains | (kV/unit MW) | 100 | 100 |
| SMES Controller gains | (kV/kA) | 0.2 | 0.2 |
| Inductor rated currents of SMES | (kA) | 4.5 | 4.5 |
| Capacity ratios of two-area systems | −1 | ||
| HVDC coefficients | (s) | 0.1732 | |
| HVAC coefficients | (s) | 0.0865 | |
| Control | Area | Coefficients | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| PID | Area a | 2.2534 | 2.9881 | - | 3.9329 | - | - | - | - | - |
| Area b | 2.1632 | 3.6812 | - | 0.9798 | - | - | - | - | - | |
| PII2D | Area a | 3.0328 | 3.3456 | 0.9562 | 0.1223 | - | - | - | - | - |
| Area b | 4.1745 | 3.1061 | 2.0038 | 0.0364 | - | - | - | - | - | |
| 1+PID | Area a | 4.4215 | 3.8856 | - | 0.3672 | - | - | - | - | - |
| Area b | 3.6573 | 2.7466 | - | 0.0532 | - | - | - | - | - | |
| 1+PII2D | Area a | 4.5574 | 3.2037 | 3.7654 | 0.9114 | - | - | - | - | - |
| Area b | 4.2711 | 3.5778 | 2.6247 | 1.0947 | - | - | - | - | - | |
| 1+PII2D/FOPID | Area a | 3.8719 | 4.4043 | 0.45528 | 4.9478 | 4.7938 | 4.7797 | 4.8851 | 0.74836 | 0.8521 |
| Area b | 4.6081 | 4.4099 | 1.8515 | 2.8065 | 2.2303 | 3.1694 | 4.0063 | 0.6355 | 0.8204 | |
| Scn. | Controller | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| MO | MU | ST | MO | MU | ST | MO | MU | ST | ||
| No. 1 | PID | 0.0007 | 0.0076 | 14 | 0.0008 | 0.0053 | 20 | 0.00009 | 0.0017 | 27 |
| PII2D | 0.00009 | 0.0055 | 14 | 0.00008 | 0.0049 | 19 | 0.00002 | 0.0016 | 25 | |
| 1+PID | 0.00015 | 0.0043 | 35 | 0.00005 | 0.0028 | 37 | 0.00006 | 0.0013 | 32 | |
| 1+PII2D | 0.00008 | 0.0027 | 29 | 0.00017 | 0.0011 | 31 | 0.00009 | 0.0012 | 25 | |
| 1+PII2D/FOPID | 0.00006 | 0.00085 | 7 | 0 | 0.00018 | 9 | 0 | 0.000005 | 7 | |
| No. 2 | PID | 0.0026 | 0.0098 | 18 | 0.0038 | 0.0091 | 19 | 0.0005 | 0.0021 | 16 |
| PII2D | 0.0021 | 0.0067 | 17 | 0.0026 | 0.0069 | 15 | 0.00004 | 0.0015 | 14 | |
| 1+PID | 0.00031 | 0.0035 | 23 | 0.00006 | 0.0026 | 18 | 0.00007 | 0.0014 | 24 | |
| 1+PII2D | 0.00015 | 0.0031 | 27 | 0.00052 | 0.0015 | 22 | 0.00001 | 0.0013 | 20 | |
| 1+PII2D/FOPID | 0.00003 | 0.00079 | 10 | 0 | 0.0002 | 9 | 0 | 0.00009 | 8 | |
| No. 3 | PID | 0.0695 | 0.1174 | 23 | 0.0419 | 0.0734 | 19 | 0.0145 | 0.0258 | 18 |
| PII2D | 0.0688 | 0.0821 | 20 | 0.0139 | 0.0565 | 18 | 0.0034 | 0.0252 | 21 | |
| 1+PID | 0.0299 | 0.0501 | 18 | 0.0121 | 0.0408 | 17 | 0.0024 | 0.0216 | 16 | |
| 1+PII2D | 0.0216 | 0.0363 | 16 | 0.0029 | 0.0115 | 15 | 0.0103 | 0.0185 | 14 | |
| 1+PII2D/FOPID | 0.0011 | 0.0085 | 8 | 0.0002 | 0.0032 | 9 | 0.0073 | 0.0007 | 6 | |
| No. 4 | PID | 0.0063 | 0.0108 | HS | 0.0048 | 0.0088 | HS | 0.0017 | 0.0026 | HS |
| PII2D | 0.0046 | 0.0068 | HS | 0.0036 | 0.0067 | HS | 0.0015 | 0.0022 | HS | |
| 1+PID | 0.0031 | 0.0037 | MS | 0.0025 | 0.0038 | MS | 0.0012 | 0.0018 | MS | |
| 1+PII2D | 0.0021 | 0.0026 | MS | 0.0007 | 0.0009 | MS | 0.0011 | 0.0017 | MS | |
| 1+PII2D/FOPID | 0.0004 | 0.0003 | LS | 0.00009 | 0.0003 | LS | 0.00006 | 0.00008 | LS | |
| No. 5 | PID | 0.1211 | 0.0117 | HS | 0.0751 | 0.0209 | HS | 0.0267 | 0.0038 | HS |
| PII2D | 0.0845 | 0.0112 | HS | 0.0575 | 0.0142 | HS | 0.0263 | 0.0026 | HS | |
| 1+PID | 0.0513 | 0.0046 | MS | 0.0419 | 0.0134 | MS | 0.0223 | 0.0029 | MS | |
| 1+PII2D | 0.0379 | 0.0145 | MS | 0.0113 | 0.0031 | MS | 0.0191 | 0.0028 | MS | |
| 1+PII2D/FOPID | 0.0076 | 0.0012 | LS | 0.0031 | 0.0003 | LS | 0.0013 | 0.0001 | LS | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
El-Sousy, F.F.M.; Aly, M.; Alqahtani, M.H.; Aljumah, A.S.; Almutairi, S.Z.; Mohamed, E.A. New Cascaded 1+PII2D/FOPID Load Frequency Controller for Modern Power Grids including Superconducting Magnetic Energy Storage and Renewable Energy. Fractal Fract. 2023, 7, 672. https://doi.org/10.3390/fractalfract7090672
El-Sousy FFM, Aly M, Alqahtani MH, Aljumah AS, Almutairi SZ, Mohamed EA. New Cascaded 1+PII2D/FOPID Load Frequency Controller for Modern Power Grids including Superconducting Magnetic Energy Storage and Renewable Energy. Fractal and Fractional. 2023; 7(9):672. https://doi.org/10.3390/fractalfract7090672
Chicago/Turabian StyleEl-Sousy, Fayez F. M., Mokhtar Aly, Mohammed H. Alqahtani, Ali S. Aljumah, Sulaiman Z. Almutairi, and Emad A. Mohamed. 2023. "New Cascaded 1+PII2D/FOPID Load Frequency Controller for Modern Power Grids including Superconducting Magnetic Energy Storage and Renewable Energy" Fractal and Fractional 7, no. 9: 672. https://doi.org/10.3390/fractalfract7090672