Dual Mode Pressure Sensing for Lower-Limb Prosthetic Interface †


1
Dept. of Industrial Engineering, University of Trento, Trento, Italy
2
Center for Materials and Microsystems, Fondazione Bruno Kessler, Trento, Italy
*
Author to whom correspondence should be addressed.
†
Presented at the Eurosensors 2017 Conference, Paris, France, 3–6 September 2017.
Proceedings 2017, 1(4), 593; https://doi.org/10.3390/proceedings1040593
Published: 22 August 2017
(This article belongs to the Proceedings of Proceedings of Eurosensors 2017, Paris, France, 3–6 September 2017)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:We present an electronic sensory system capable of measuring both dynamic and static normal pressure to monitor the pain and stress felt by amputees on contact points between residual limb and prosthesis’ sockets. Monitoring the contact forces is crucial to ease the prosthesis customization process and to reduce the pain for the final user. We propose a novel design of a sensing unit that exploits jointly piezoelectric and piezoresistive materials to detect and to discriminate dynamic and static stimuli, and a digitally controlled amplification circuit that permits the signal acquisition from both kind of transducers with low cost microcontroller. Results demonstrate that our design provides valuable information at 1 ksps rate with a global power consumption lower than 25 mW.
1. Introduction
In 2008, the estimated size of the amputee population around the globe was 30 million [1]. Main causes of amputation are diabetes, vascular diseases and accidents.
Despite innovations introduced by CAD/CAM technologies in the manufacturing process [2], the prosthesis development is still today a mostly handmade job because it is very difficult to perfectly shape the socket to fit the patient’s residual limb. In fact, an amputated limb interacts with the rigid structure of the prosthesis (the socket) leading to pain, friction and ulcers [3,4].
2. Related Works
Most of the research in healthcare focuses on the development of smart sensors with embedded readout electronics and digital interface [5]. They started as simple sensing wireless body area networks [6], designed for postural rehabilitation [7] or remote rehabilitation [8] and today, prototypes tried to integrate synthetic skin [9] into prosthesis’s sockets exploiting the flexibility, sensitivity and spatial resolution provided [10].
The main limitations of such advanced technologies are the complexity of the electronics required to interface complex, highly-integrated sensors and the costs, both of production and integration in the prosthesis development process.
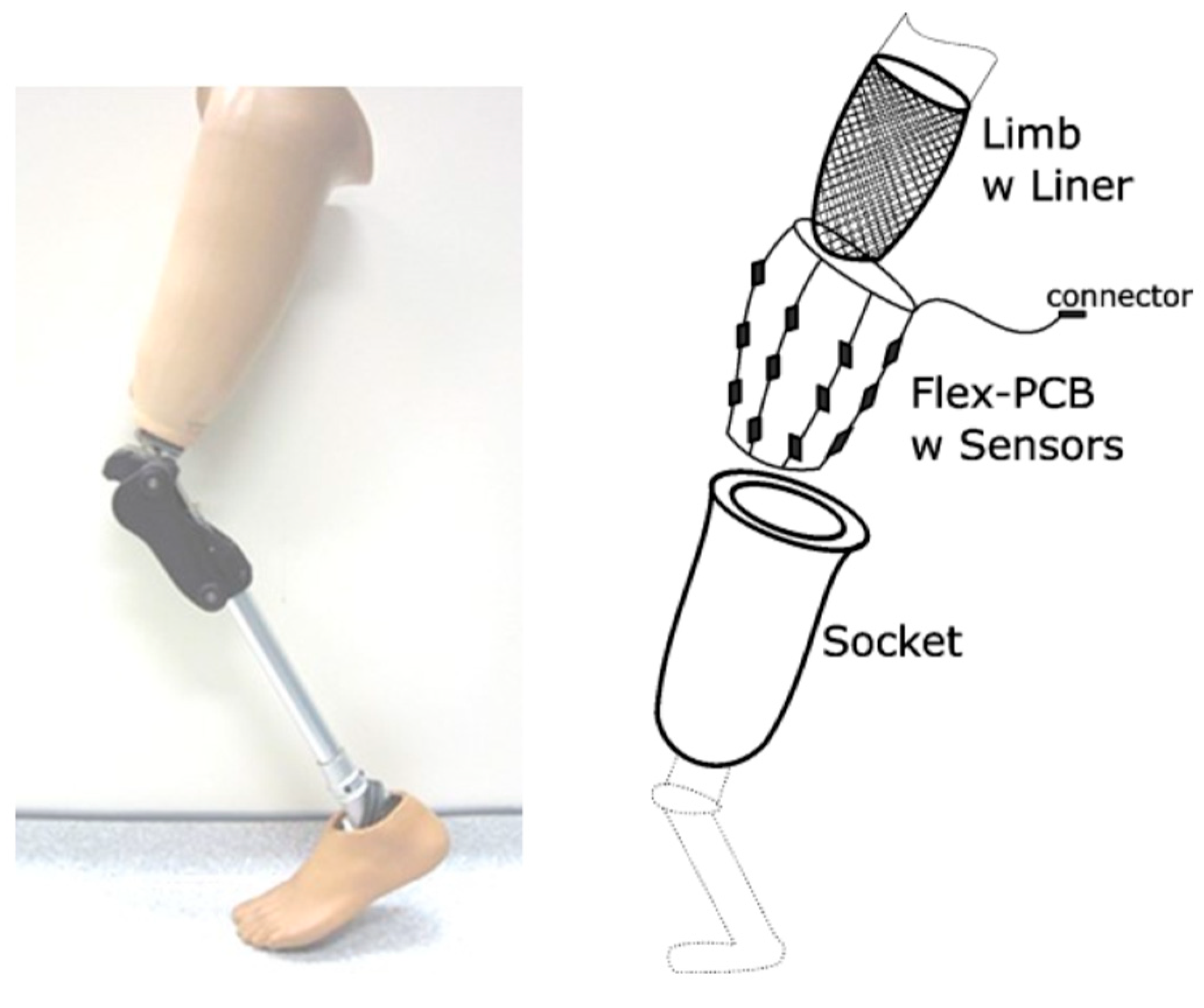
To this end we propose the use of reliable and low-cost sensing elements interfaced with a simple yet flexible electronics to reduce power consumption and readout complexity without compromising performance and flexibility. The final goal is to develop a pressure mapping enhanced prosthesis (as shown in Figure 1) to be used temporarily, in the development process, when physicians and artisans need information to speed-up customization and reduce patients’ stress.
3. Dual Mode System
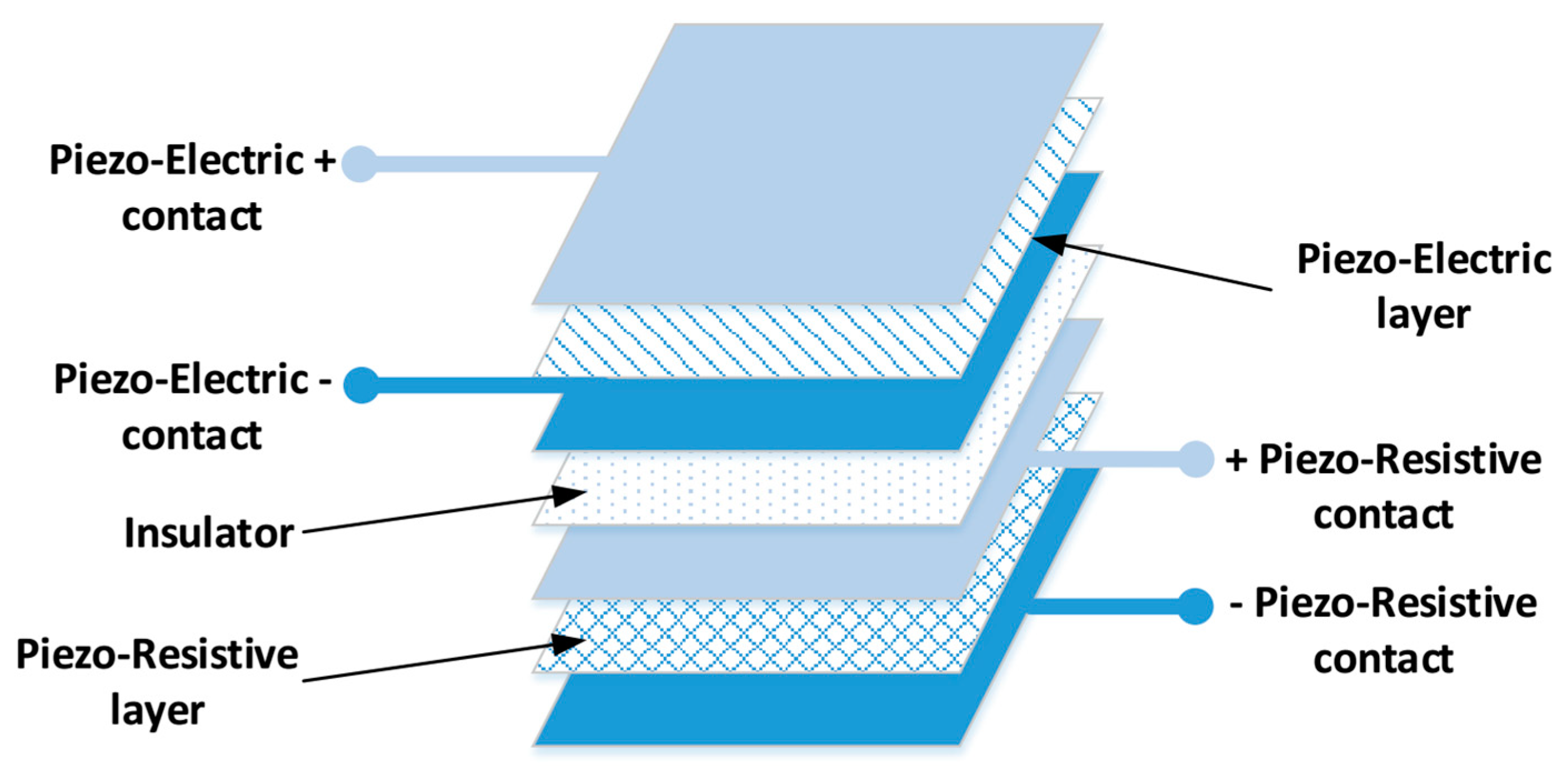
The novelty of the proposed device is that both transducers are embedded into the same package, in a stacked structure (see Figure 2) providing: (a) jointly detection and measurement of dynamic and static stimuli; (b) sensing device can be sized according to the area of interest; (c) many independent sensors can be deployed to fit flexible supports, non-flat surfaces and even flexible. Similar systems in the market, are only available in flat shape [11], while the proposed system can be adapted to more complex surfaces by means of an integrated parallel readout board and flexible sensor substrate as presented for example in [12].
To accommodate both piezo-sensing technologies we developed a digitally controlled amplification circuit that can be configured for the signal acquisition of the piezo-resistive unit and as charge-pump for the piezo-electric (Figure 3). In this way, one can configure at runtime the sensing element connected to the amplification channel, providing more flexibility in the deployment.
To evaluate reliability and responsiveness of the proposed sensor, we realized a prototype by sticking together two off-the-shelf piezo-sensors: Tekscan A301 (111 N model) piezo-resistive and PZT film sensor LDT0-028 as piezo-electric.
4. Results
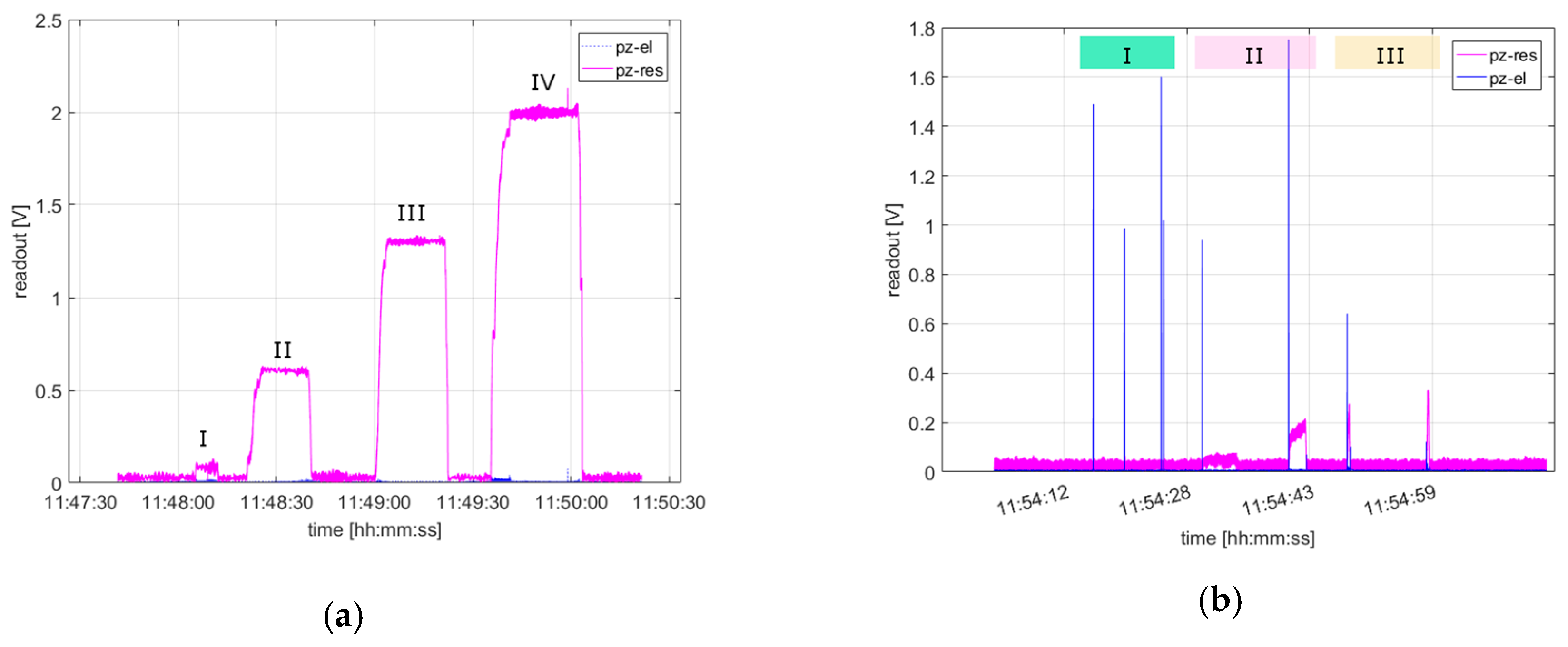
Results, presented in Figure 4 and Figure 5, show the signals at the output of the amplifier respectively to piezo-resistive (dotted line) and piezo-electric (solid line) sensing units. The comparison of tests highlights the response of the system to static/dynamic stimuli. Tapping with a finger (case I and II), the transmitted force is substantially lower and only the piezo-electric sensor provides a significant signal amplitude. Conversely, (case III), when the weight hits the sensing element it impresses a pressure that activates both sensing element. We measured that approximately 300 ms are required to discriminate between tapping and short-pressing because of the slower reaction time of piezo-resistive sensors compared to piezo-electric ones.
5. Conclusions
In this work we presented a dual mode electronic readout system for application in lower-limb prosthesis manufacturing process. The dual mode readout system allows to collect dynamic and static responses jointly for a single location with a unique stacked sensor.
Acknowledgments
Authors would like to acknowledge the H2020 SocketMaster EU Project, coordinated by TWI Ltd., and the Fondazione Cassa di Risparmio di Trento e Rovereto—CARITRO, for supporting this research.
Conflicts of Interest
The authors declare no conflict of interest.
References
- LeBlanc, M. Give Hope-Give a Hand-The LN-4 Prosthetic Hand 2008. Available online: http://events.stanford.edu/events/263/26395/ (accessed on 22 June 2017).
- Fourroux Prosthetics. Prosthetic Socket Design. Available online: http://www.fourrouxprosthetics.com/our-approach/prosthetic-socket-design.html (accessed on 22 June 2017).
- Mak, A.F.; Zhang, M.; Boone, D.A. State-of-the-art research in lower-limb prosthetic biomechanics-socket interface: A review. J. Rehabil. Res. Dev. 2001, 38, 161–174. [Google Scholar] [PubMed]
- Rossi, M.; Rizzi, A.; Lorenzelli, L.; Brunelli, D. Portable embedded systems for prosthetic interface stress mapping of lower limbs amputees. In Proceedings of the 2016 IEEE SENSORS, Orlando, FL, USA, 30 October–3 November 2016; pp. 1–3. [Google Scholar]
- Tiwana, M.I.; Shashank, A.; Redmond, S.J.; Lovell, N.H. Characterization of a capacitive tactile shear sensor for application in robotic and upper limb prostheses. Sens. Actuators A Phys. 2011, 165, 164–172. [Google Scholar] [CrossRef]
- Farella, E.; Pieracci, A.; Acquaviva, A. Design and implementation of WiMoCA node for a body area wireless sensor network. In Proceedings of the 2005 Systems Communications (ICW'05, ICMCS'05, SENET'05). Montreal, QC, Canada, 14–17 August 2005, ICHSN'05; pp. 342–347.
- Brunelli, D.; Farella, E.; Rocchi, L.; Dozza, M.; Chiari, L.; Benini, L. Bio-feedback system for rehabilitation based on a wireless body area network. In Proceedings of the Fourth Annual IEEE International Conference on Pervasive Computing and Communications Workshops (PERCOMW'06). Pisa, Italy, 13–17 March 2006. [Google Scholar]
- Rossi, M.; Rizzi, A.; Lorenzelli, L.; Brunelli, D. Remote rehabilitation monitoring with an IoT-enabled embedded system for precise progress tracking. In Proceedings of the 2016 IEEE International Conference on Electronics, Circuits and Systems (ICECS), Monte Carlo, Monaco, 11–14 December 2016; pp. 384–387. [Google Scholar]
- Yogeswaran, N.; Dang, W.; Navaraj, M.T.; Shakthivel, D.; Khan, S.; Polat, E.O.; Gupta, S.; Heidari, H.; Kaboli, M.; Lorenzelli, L.; et al. New materials and advances in making electronic skin for interactive robots. Adv. Robot. 2015, 29, 1359–1373. [Google Scholar] [CrossRef]
- Harada, S.; Kanao, K.; Yamamoto, Y.; Arie, T.; Akita, S.; Takei, K. Fully printed flexible fingerprint-like three-axis tactile and slip force and temperature sensors for artificial skin. ACS Nano 2014, 8, 12851–12857. [Google Scholar] [CrossRef] [PubMed]
- Mat Dev Kits. SensingTex. Available online: http://sensingtex.com/development-kits (accessed on 22 June 2017).
- Rossi, M.; Khouil, A.O.; Lorenzelli, L.; Brunelli, D. Energy neutral 32-channels embedded readout system for IoT-ready fitness equipments. In Proceedings of the IEEE SAS 2016, Catania, Italy, 20–22 April 2016; pp. 1–6. [Google Scholar]
Figure 1.
Schematic principle of pressure mapping enhanced lower-limb prosthesis. The flexible electronic system can be temporarily inserted in raw sockets to acquire high resolution data.
Figure 1.
Schematic principle of pressure mapping enhanced lower-limb prosthesis. The flexible electronic system can be temporarily inserted in raw sockets to acquire high resolution data.
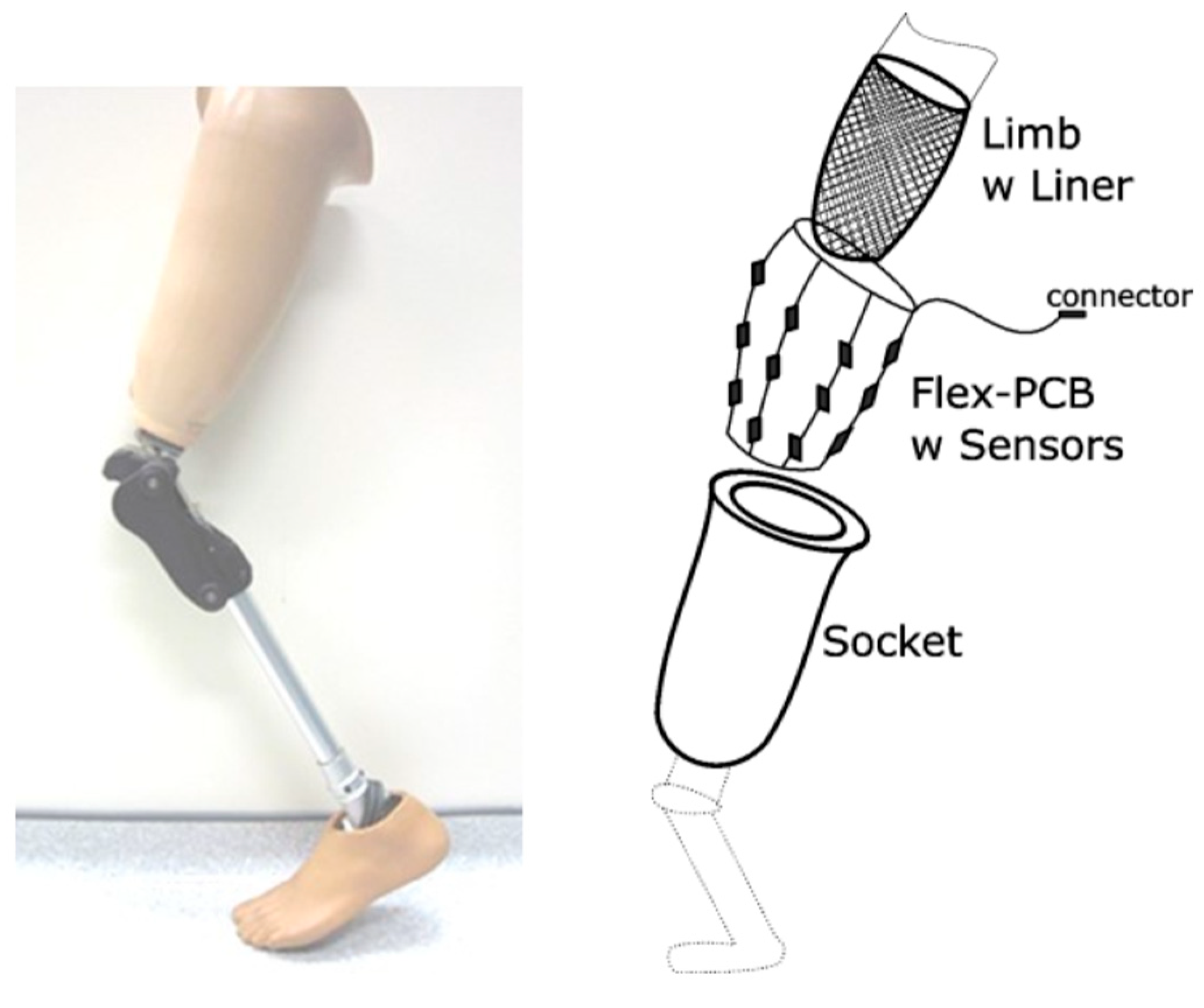
Figure 2.
Block scheme of the joint sensing system. The sensing device embeds both piezo-electric and piezo-resistive layers interleaved with two metallic foils (top and bottom) that realize the electrical connections. An insulating layer separates the two stacked sensors.
Figure 2.
Block scheme of the joint sensing system. The sensing device embeds both piezo-electric and piezo-resistive layers interleaved with two metallic foils (top and bottom) that realize the electrical connections. An insulating layer separates the two stacked sensors.

Figure 3.
Digitally controlled analog amplification stage. Piezo-Resistive readout, non-inverting configuration, signal PR_ctrl is HIGH (PE_ctrl LOW) to provide an offset at the positive input of the operational amplifier (U1, a JFET). Piezo-electric readout, charge amplifier configuration, the low PR_ctrl signal, drives the V+ JFET input to GND while the PE_ctrl HIGH enables the capacitive feedback (C1 and R4).
Figure 3.
Digitally controlled analog amplification stage. Piezo-Resistive readout, non-inverting configuration, signal PR_ctrl is HIGH (PE_ctrl LOW) to provide an offset at the positive input of the operational amplifier (U1, a JFET). Piezo-electric readout, charge amplifier configuration, the low PR_ctrl signal, drives the V+ JFET input to GND while the PE_ctrl HIGH enables the capacitive feedback (C1 and R4).
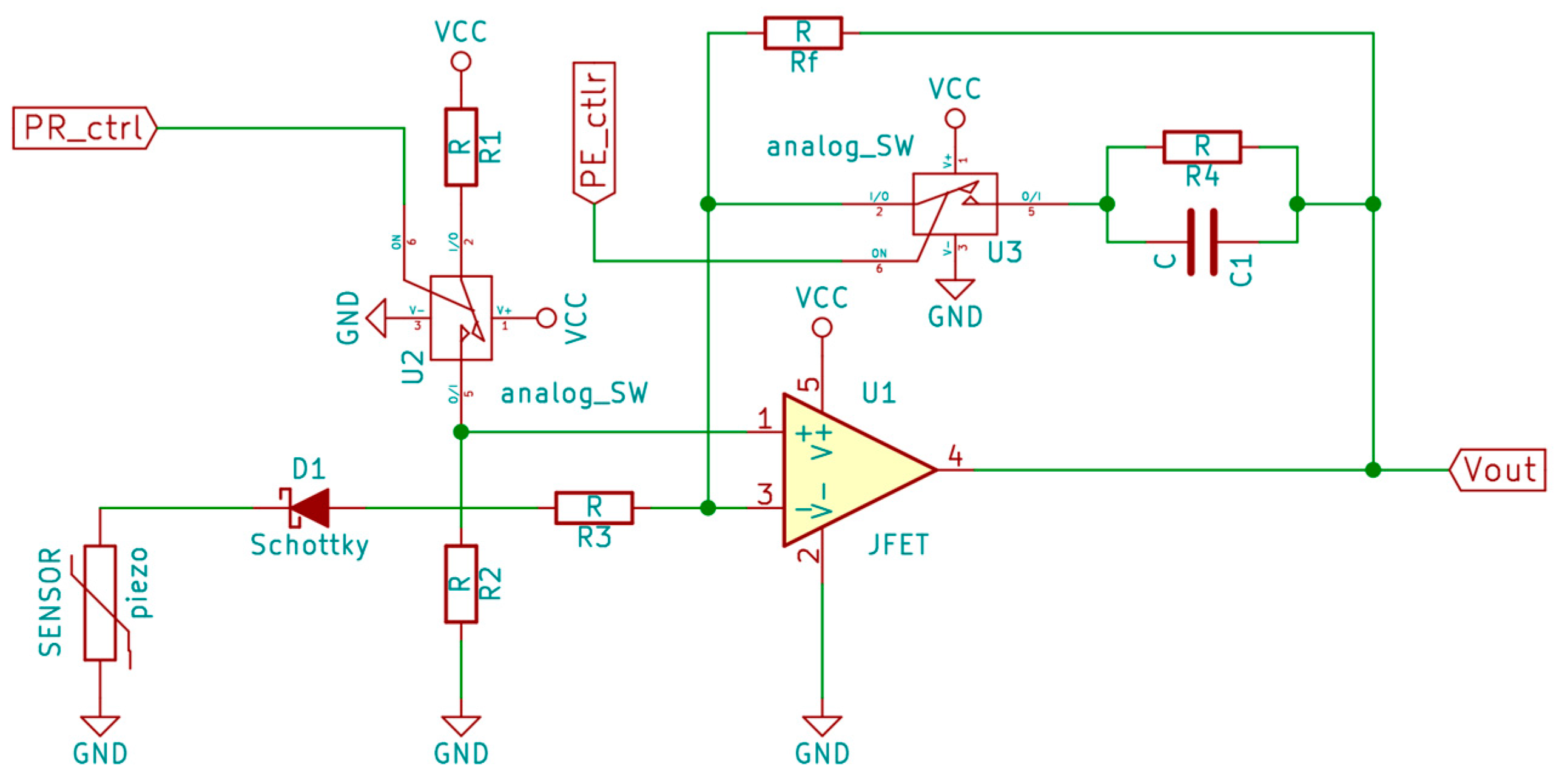
Figure 4.
Results of the characterization of the joint system. (a) Static Response: 2 kg (case I), 5.3 kg (case II), 14.6 kg (case III) and 31.3 kg (case IV). Only the piezo-resistive element reacts to changes while the other produced very sparse spikes corresponding to placement and removal of the weights. (b) Dynamic Response: tapping with a finger (sec I), short pressure with 1 and 2 kg (sec II) and short pressure with a finger (sec III).
Figure 4.
Results of the characterization of the joint system. (a) Static Response: 2 kg (case I), 5.3 kg (case II), 14.6 kg (case III) and 31.3 kg (case IV). Only the piezo-resistive element reacts to changes while the other produced very sparse spikes corresponding to placement and removal of the weights. (b) Dynamic Response: tapping with a finger (sec I), short pressure with 1 and 2 kg (sec II) and short pressure with a finger (sec III).
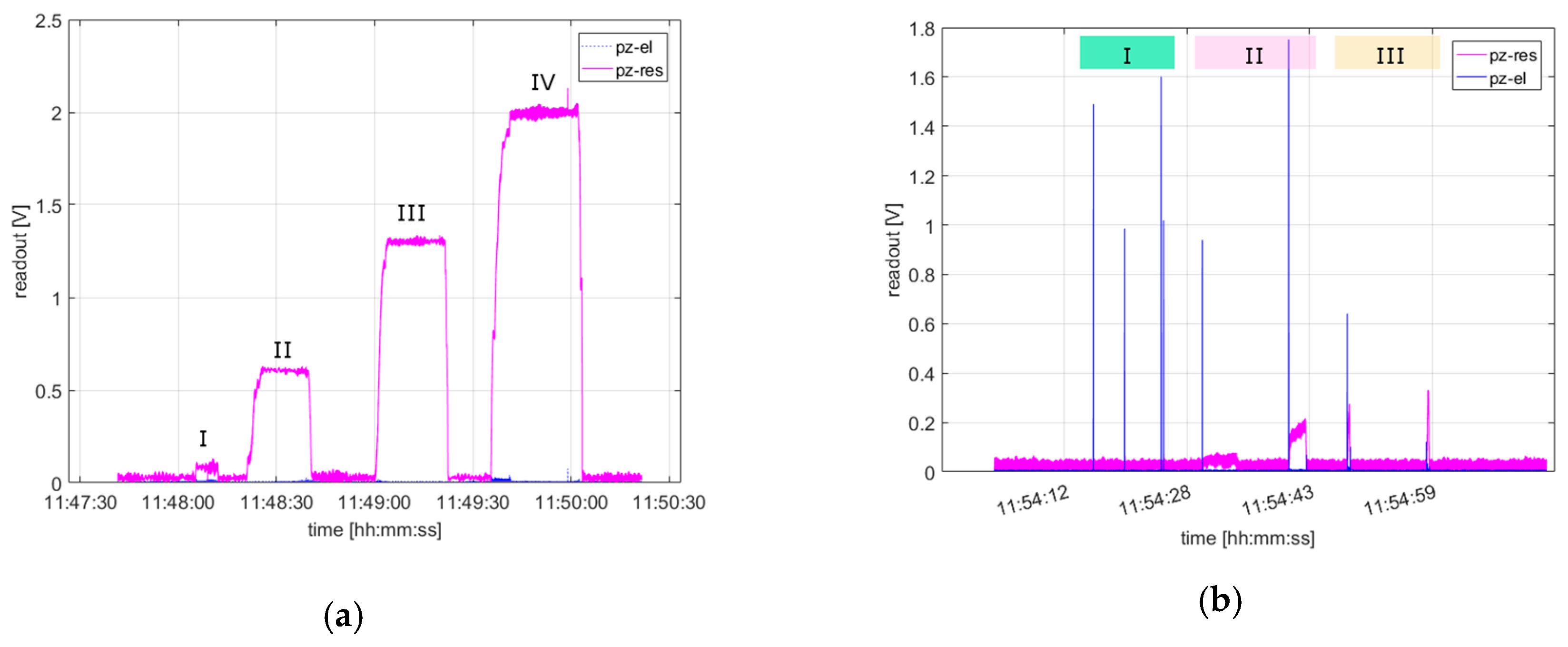
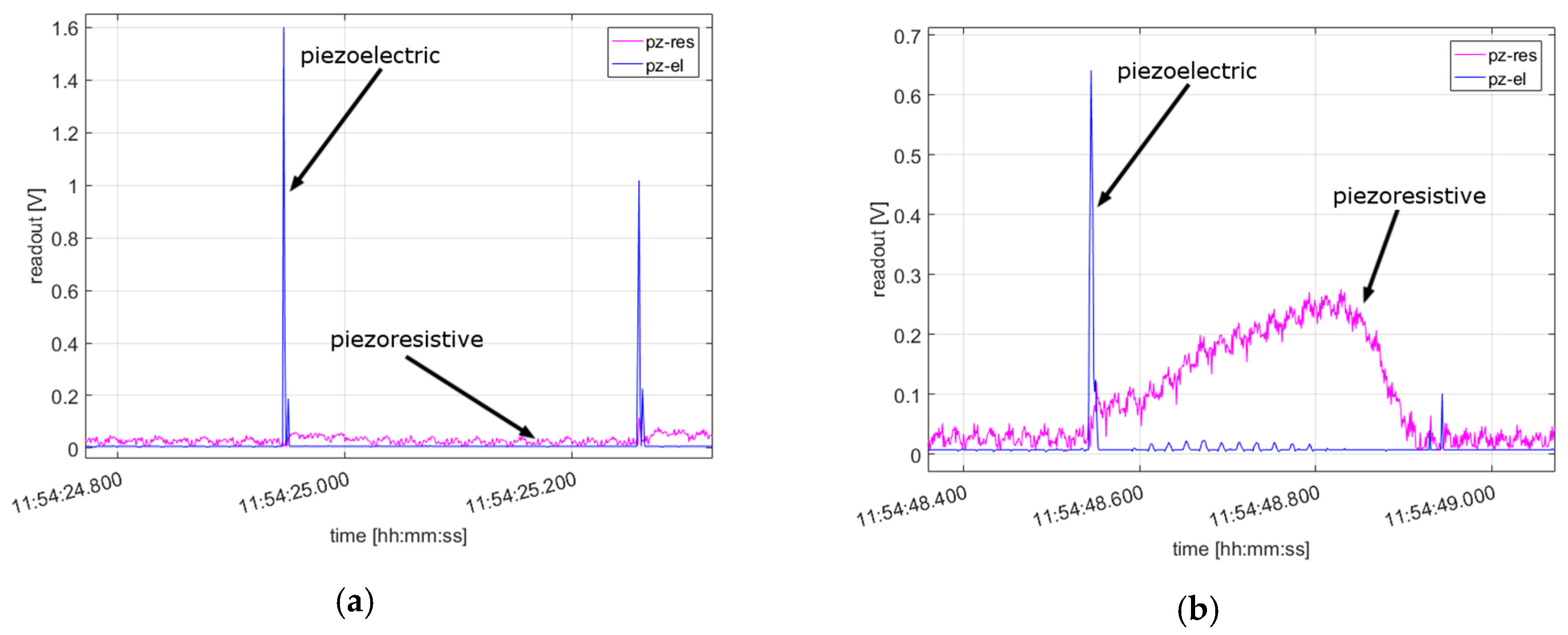
Figure 5.
Detailed view of the results shown in Figure 4. (a) Tapping stimulus: the piezo-electric stage immediately reacts while the piezo-resistive response is negligible. (b) Normal pressure: the piezo-electric stage immediately reacts to the dynamic event (weight application) and then settles while the piezo-resistive stage takes time to provide a response proportional to the stimulus.
Figure 5.
Detailed view of the results shown in Figure 4. (a) Tapping stimulus: the piezo-electric stage immediately reacts while the piezo-resistive response is negligible. (b) Normal pressure: the piezo-electric stage immediately reacts to the dynamic event (weight application) and then settles while the piezo-resistive stage takes time to provide a response proportional to the stimulus.
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Rossi, M.; Nardello, M.; Lorenzelli, L.; Brunelli, D. Dual Mode Pressure Sensing for Lower-Limb Prosthetic Interface. Proceedings 2017, 1, 593. https://doi.org/10.3390/proceedings1040593
AMA Style
Rossi M, Nardello M, Lorenzelli L, Brunelli D. Dual Mode Pressure Sensing for Lower-Limb Prosthetic Interface. Proceedings. 2017; 1(4):593. https://doi.org/10.3390/proceedings1040593
Chicago/Turabian StyleRossi, Maurizio, Matteo Nardello, Leandro Lorenzelli, and Davide Brunelli. 2017. "Dual Mode Pressure Sensing for Lower-Limb Prosthetic Interface" Proceedings 1, no. 4: 593. https://doi.org/10.3390/proceedings1040593