1. Introduction
A lot of events with a wheelchair are performed in a disability sports represented by the Paralympics, and various types of wheelchair are developed with depending on the degree or state of a physical handicap of the athlete, or the characteristics of sport event. There is an athlete who must drive a wheelchair by only one hand because of loss of one arm or hemiplegia. Because an existence wheelchair for sport competitions is produced assuming both hands drive, such an athlete must drive a wheelchair by a difficult method to operate the driving wheel of right and left with one hand in turn. Furthermore, in a wheel-chair tennis player, even the hand with a racket must drive a wheel when a wheelchair drives straight.
The purpose of this study was to develop the new wheel-chair which had the function to drive straight by one-hand operation.
2. Materials and Methods
2.1. The Mechanism of a Wheel-Chair Driving Straight by One-Hand Operation
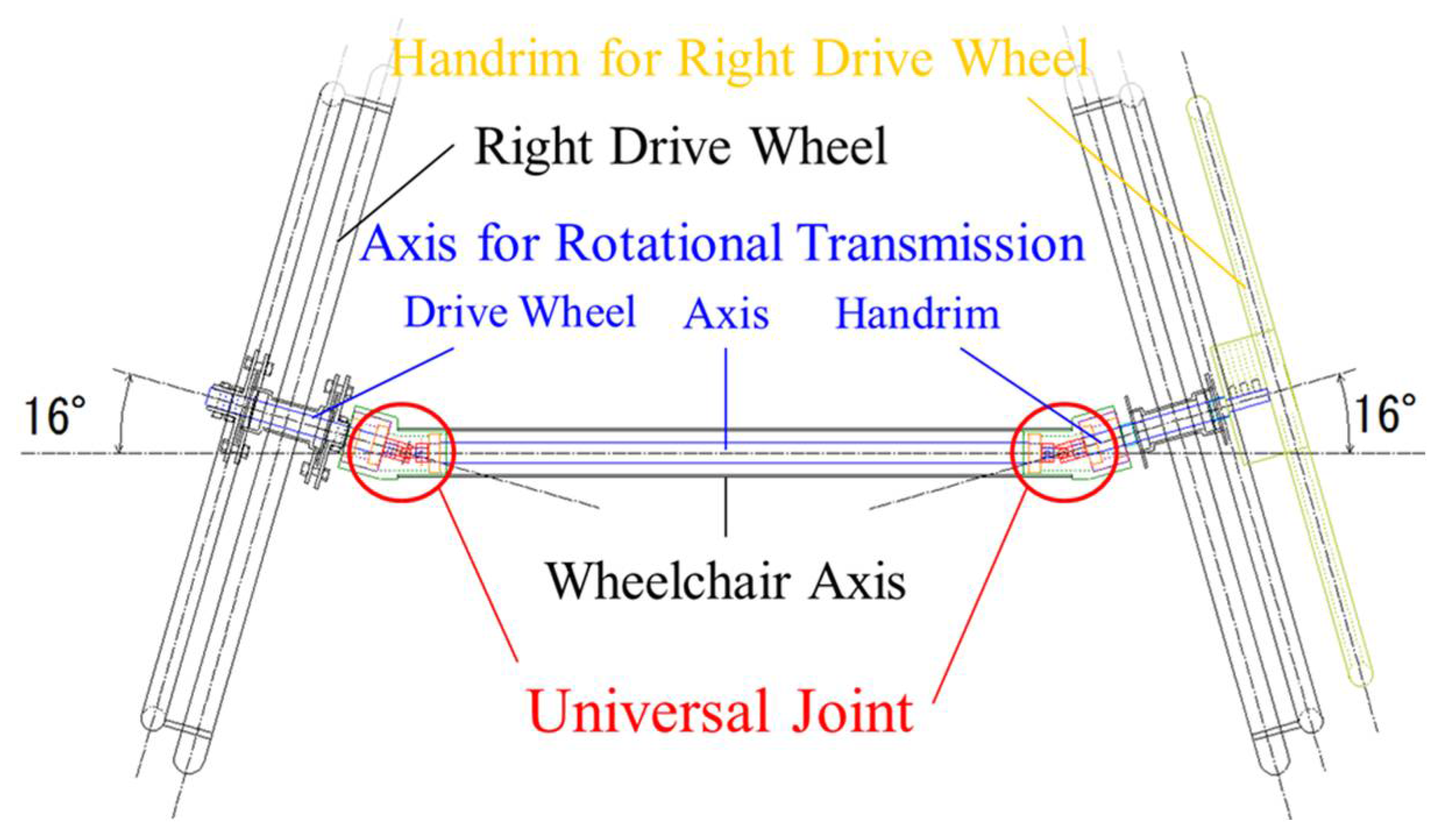
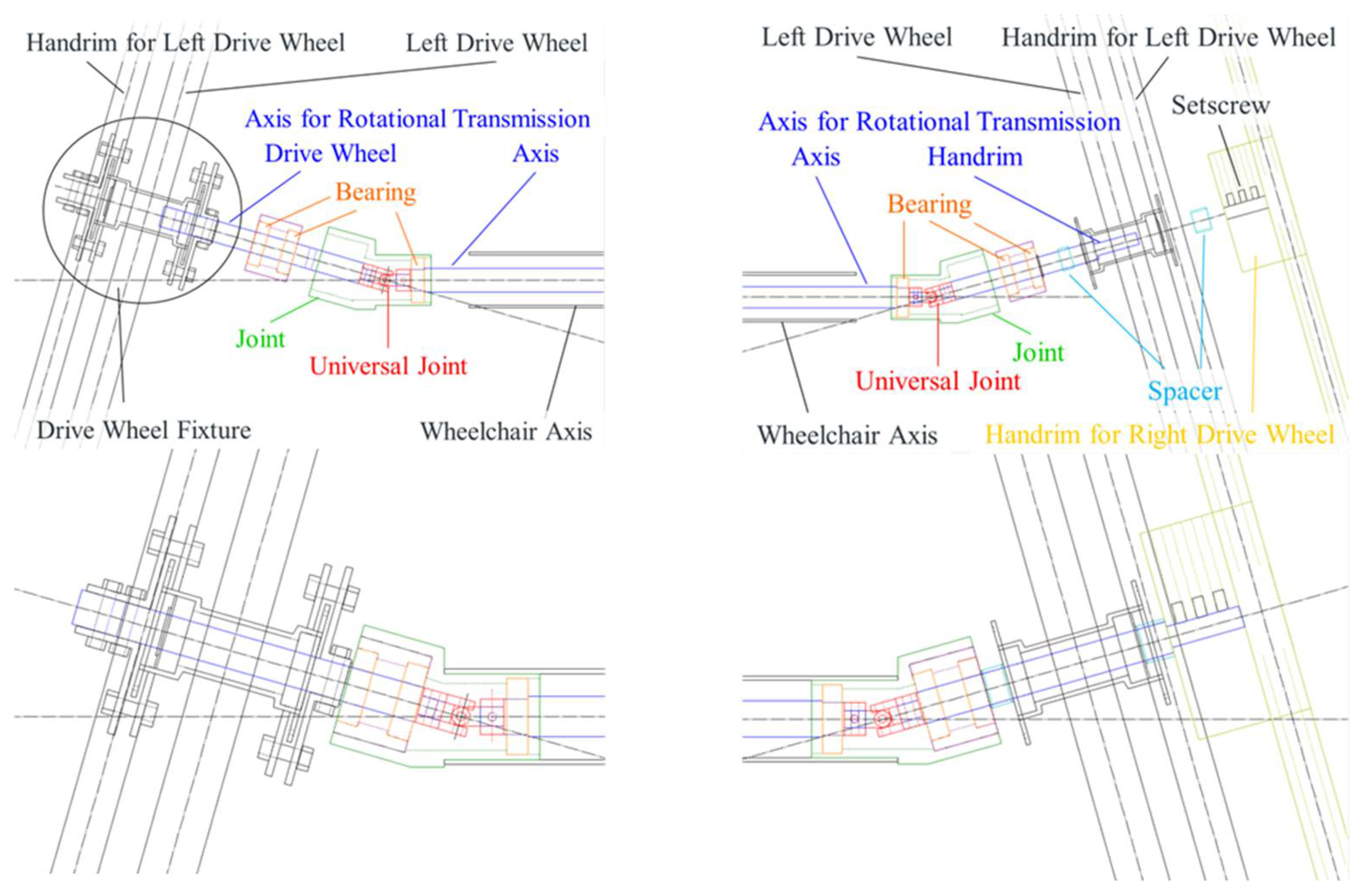
Figure 1 shows the mechanism to drive a wheel-chair straight by one-hand operation. In general, the right and left independent wheels have been adopted in a wheelchair. Therefore, a wheel-chair cannot drive straight by one-hand operation. In this study, the driving force transmission axis (DFTA) was developed to transmit the driving force from the one-side of wheel to another side of that. The DFTA was made by a standard iron of which a specific gravity was 7.87 g/cm
3 and a young’s modulus was 192.08 GPa. Two universal joints made by same standard iron were installed onto the DFTA as a camber angle was set to each wheel in sports competition (refer in
Figure 1 and
Figure 2). The wheel-chair which attached the DFTA could drive straight by one-hand operation [
1,
2,
3].
The large torque, however, was generated in the DFTA, because the DFTA transmitted the driving force from the one-side of wheel to another side by the axis of small diameter. Furthermore, the shear stress generated by this torque in the DFTA would lead to the DFTA break. Therefore, the shear stress in the DFTA was calculated to examine an axial strength and durability.
On previous study, the maximum driving force in driving wheelchair by one-hand operation was 160 N in the one hand operation. As for the diameter of the wheelchair (the hand rim) in this study was 55.0 cm and that of the DFTA was 0.018 cm, torque generated in the DFTA became to 44.0 Nm. Generally, the shear stress in radius
r is
(where
T is Torque,
IP is the polar moment of inertia of area). Therefore, the maximum shear stress (τ
max) is
(where
ZP is a polar sectional coefficient). The relations of the polar moment of inertia of area and polar sectional coefficient is
Because the DFTA is a true circle axis in diameter
D, the polar moment of inertia of area is
And the polar sectional coefficient is
The maximum shear stress τ
max is
in substituting
T = 44.0 Nm and axial diameter
D = 0.018 for Equation (6), the maximum shear stress is
. Furthermore, in considering a camber angle of 16 degrees, the maximum shear stress
= 39.53 MP [
4,
5].
On the wheelchair developed in this study, 39.53 MP of the maximum shear stress calculated by the torque in driving was the demand specifications as the durability and strength of the DFTA.
Figure 3 shows the outward appearance of new wheel-chair for sports competition which can drive straight by one-hand operation.
2.2. Experiment for Examining the Durability and Strength of the DFTA of the New Wheelchair
To examine the strength and durability of the DFTA in driving the wheel-chair experimentally, the system to measure a torque by incorporating a torque meter in the DFTA was developed.
Figure 4 shows the outline of the system to measure a torque in the DFTA. Because the torque meter (“UTMII-50 Nm” made by Uni-Pulse Co., Ltd.) is the slip ring structure, an axis of the DFTA turns smoothly. In a torque meter box attached to the axis, the electronic circuit such as a distortion amplifier, the microcontroller is incorporated. While this electronic circuit board in a box turns with an axis, a voltage from an electronic circuit is received. A distortion gauge detects the quantity of distortion that occurred in the axis. A system converts a provided electrical signal into a digital code, and transmits it to an electronic circuit. This system calculates the torque according to the quantity of axial torsion detected by a torque meter.
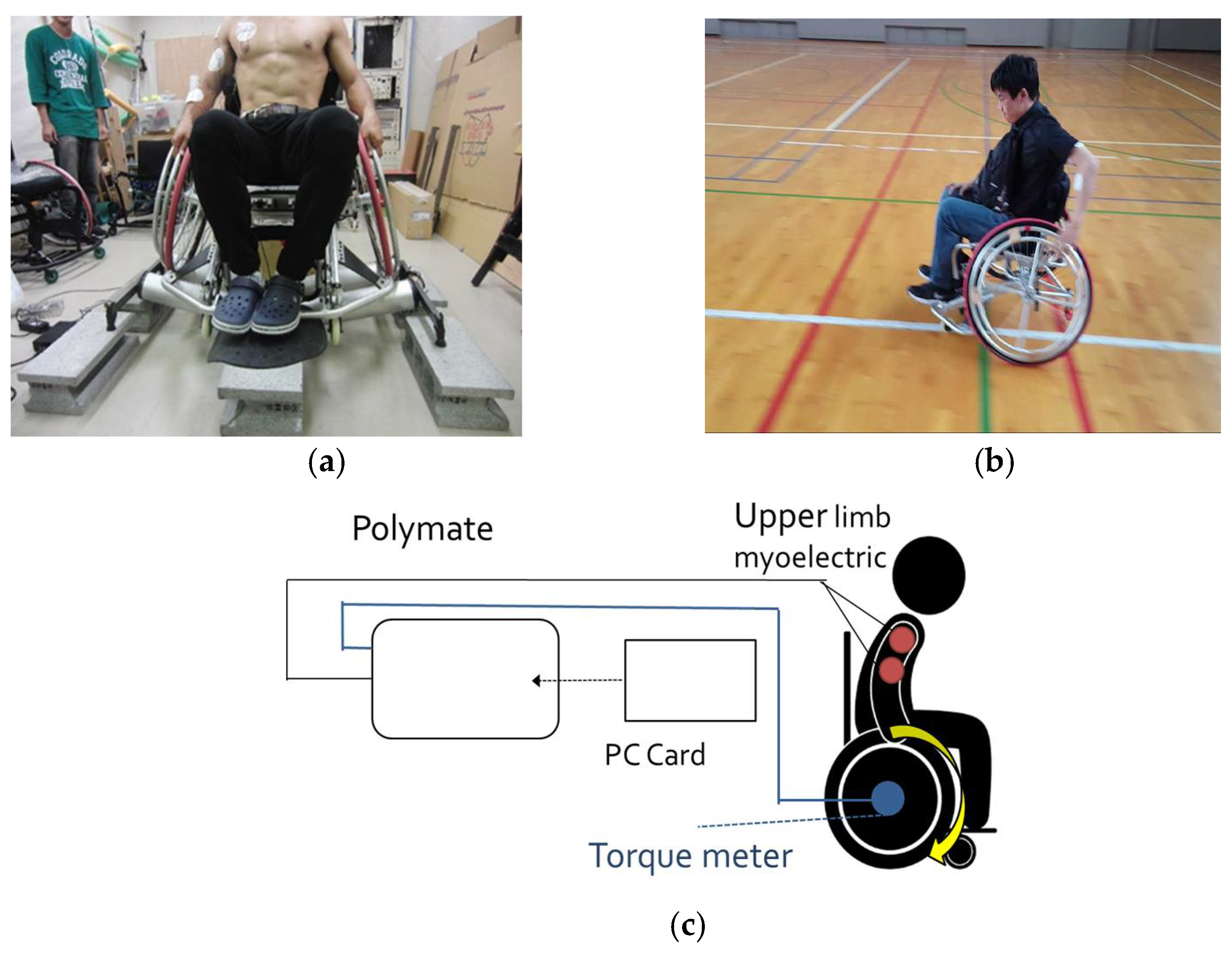
Figure 5 shows the experimental set up and locations. Experiment locations were as follows; (a) on the bike roller treadmill; (b) on the level ground (floor). Furthermore, (c) is the experimental set up. Subjects was 5 healthy adult male (22.6 ± 0.8). Subject was instructed how to drive the wheel-chair following two power conditions; (a) in normal driving (b) in hard driving. Furthermore, subject was instructed to drive straight by one-hand operation of 13 times per 1 min.
The signal from a torque meter in driving the wheelchair was recorded into the PC Card via a multipurpose biomedical amplifier (Polymate AP1132 made by Digi-Tech Co., Ltd.). In this study, this biomedical amplifier was improved to the system which could measure and record a mechanical signal like a torque by synchronizing with the specific circuit and mechanical amplifier.
3. Results
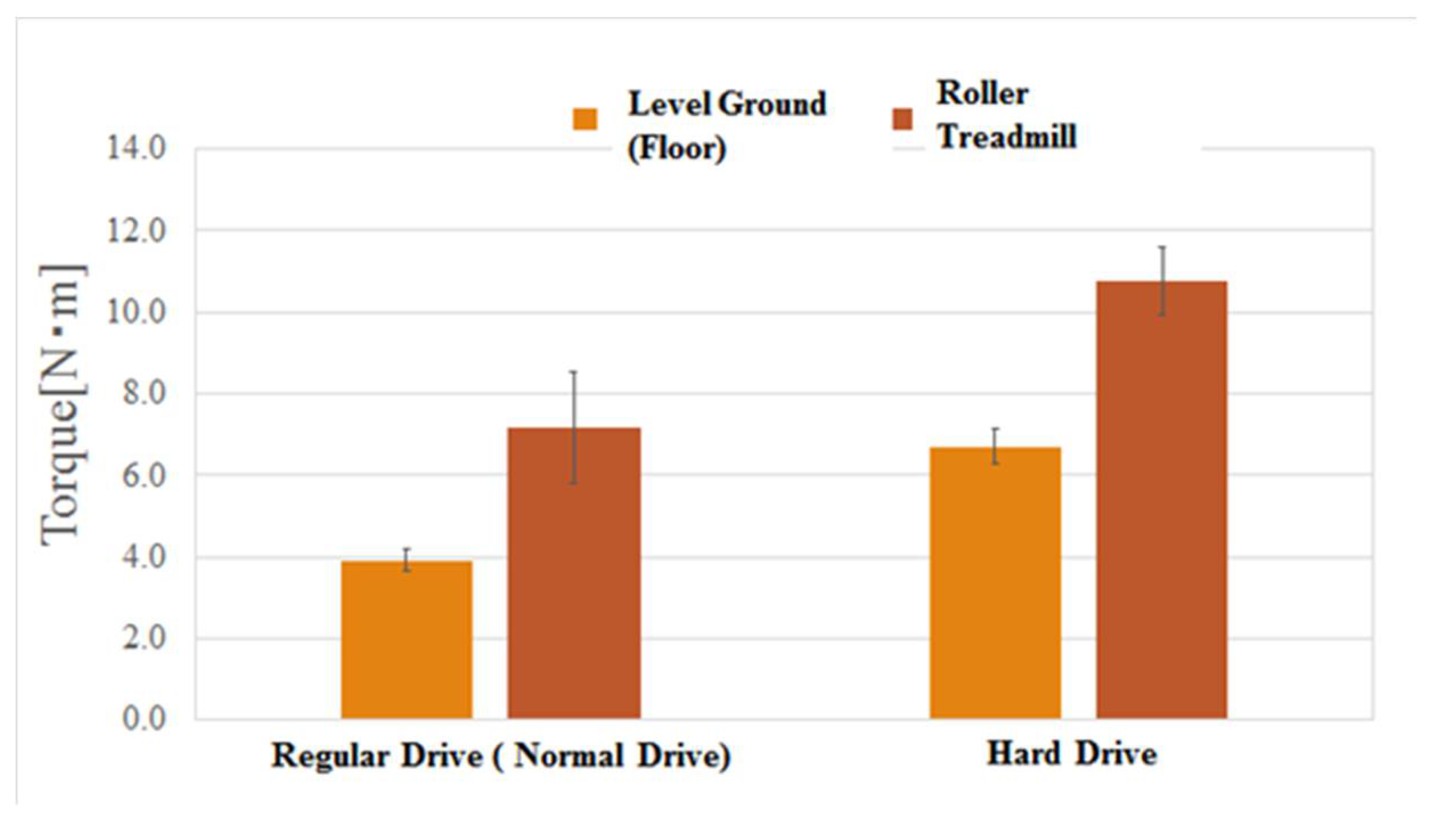
Figure 6 shows the measurement result of the torque generating on the DFTA in driving the wheelchair by one-hand operation. An average of the torque in normal driving on the level ground (floor) was 3.9 Nm (SD = 0.6). On the other hand, that on the bike roller treadmill was 7.2 Nm (SD = 3.0). An average of the torque in hard driving on the level ground (floor) was 6.7 Nm (SD = 1.0). That on the bike roller treadmill was 10.8 Nm (SD = 1.9).
The torque in hard driving was higher than that in normal driving on both of the level ground and the bike roller treadmill. The torque driving on the bike roller treadmill was higher than that on the level ground in both of normal and hard driving. The reason why of an above results is thought that an inertial mass of the rollers using the bike roller treadmill was very small and an inertia torque of the bike roller treadmill was small.
4. Discussions
As mentioned-above, the purpose of this study was to develop the new wheel-chair which has the function to drive straight by one-hand operation. To perform this purpose, the DFTA was developed to transmit the driving force from the one-side of wheel to another side of that. The wheel-chair which attached the DFTA could drive straight by one-hand operation [
1,
2,
3]. The torque was, however, generated in the DFTA, because the DFTA transmitted the driving force from the one-side of wheel to another side. Furthermore, the shear stress in the DFTA generated by this torque would lead to the DFTA break. The shear stress in the DFTA was calculated to examine the axial strength and durability. On the DETA of the wheelchair, the maximum shear stress calculated from the torque in driving was 39.53 MP and this was defined as the standard of the demand specifications as a strength and durability of the DFTA [
4,
5].
Table 1 shows an average of the maximum shear stress calculated in substituting an average of the torque of each subject in hard driving for above-mentioned following Equation (7).
An average of the maximum shear stress on the level ground (floor) was 10.0 MP (SD = 2.0). Furthermore, that on the bike roller treadmill was 14.5 MP (SD = 2.8). The maximum shear stresses on both locations were lower than that of the demand specifications of the DFTA. From this point, it is thought the DFTA developed in this study and attached into the wheelchair has enough strength and durability to drive straight by one-hand operation. It is, however, necessary for complete evidences of strength and durability to perform the fracture experiment of the DFTA. This is the future subject.
5. Conclusions
This study is summarized as follows,
- (1)
The new wheel-chair which has the function to drive straight by one-hand operation was developed.
- (2)
To drive straight by one-hand operation, the driving force transmitting axis (DFTA) was developed and equipped into the wheelchair.
- (3)
From comparison with the calculated maximum shear stress of the DFTA in driving a wheel-chair and the experimental shear stress, it was thought the DFTA has enough strength and durability to drive straight by one-hand operation. It is, however, necessary for complete evidences of strength and durability to perform the fracture experiment of the DFTA. This is the future subject.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}