Analysis of Swimming Motion for a Swimmer with Unilateral Transradial Deficiency to Develop Better Training Paddles †

1
Department of Systems and Control Engineering, Tokyo Institute of Technology, Tokyo 152-8552, Japan
2
University of Washington, Seattle WA 98195, USA
*
Author to whom correspondence should be addressed.
†
Presented at the 13th conference of the International Sports Engineering Association, Online, 22–26 June 2020.
Proceedings 2020, 49(1), 9; https://doi.org/10.3390/proceedings2020049009
Published: 15 June 2020
(This article belongs to the Proceedings of The 13th Conference of the International Sports Engineering Association)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:Devices for swimmers with arm amputation/deficiency have not been developed a lot and therefore many improvements can be realized. Although swimmers often use paddles during training, paddles on the market are basically for swimmers without amputation/deficiency. The objective of this study was to analyze the swimming motion of a swimmer with unilateral transradial deficiency and to obtain the findings for development of better training paddles. The crawl stroke was filmed for a swimmer with unilateral transradial deficiency. The body geometry as well as the joint motion based on the filmed images were put into the swimming human simulation model SWUM, and a simulation was conducted. From the simulation, the coordination and thrusts of both limbs were obtained and fully discussed. Overall, significant asymmetry between the intact and deficient limbs was found. It was also found that the deficient limb contributed to the propulsion only for 7% of the intact limb.
1. Introduction
Swimming is one of the physical activities that is the most practiced in the world. Recently, many improvements have been realized to make its accessibility easier for people with physical disabilities. However, devices for swimmers with arm amputation/deficiency have not been developed a lot and therefore, many improvements can be realized. Even if prostheses are not allowed during competition, the training time is very important for swimmers. Having arm amputation/deficiency creates an unbalanced movement during swimming. Consequently, the swimmer’s shoulders do not produce the same effort and muscles are not trained in the same way. This unbalance might cause some injuries. Although swimmers often use paddles during training, paddles on the market are basically for swimmers without amputation/deficiency. In the previous study [1], a paddle for a swimmer with transradial amputation/deficiency was designed based on the results of numerical simulation, and an actual prototype was developed as well. However, since that paddle was based on the simulation with standard swimming motion, the designed paddle was found to be too large for an actual swimmer with transradial amputation/deficiency.
There are few previous studies about swimming with unilateral transradial deficiency from a biomechanical viewpoint. Osborough et al. investigated the relationships between the stroke parameters in freestyle for competitive unilateral arm amputee swimmers [2], and also investigated the effect of swimming speed on inter-arm coordination as well as leg-to-arm coordination [3,4]. Figueiredo et al. conducted biophysical characterization of a swimmer with unilateral arm amputation [5]. Lecrivain et al. constructed a CFD (computational fluid dynamics) model for a swimmer with a lower arm amputation, and investigated the forces generated by the upper arm [6]. Lecrivain et al. further investigated the effect of body roll and arm rotation speed on propulsive force [7]. Although these previous studies are pioneering works, more biomechanical studies need to be done to know more about the mechanics of swimming with unilateral transradial deficiency. Indeed, there have been no studies in which the thrusts (propulsive forces) by the intact and deficient limbs are calculated and discussed.
The objective of this study was to analyze the swimming motion of a swimmer with unilateral transradial deficiency and to obtain the findings for development of better training paddles. First, the crawl stroke was filmed for a swimmer with unilateral transradial deficiency. The body geometry as well as the joint motion based on the filmed images were put into the swimming human simulation model SWUM [8], which was developed by the authors’ group, and a simulation was conducted. From the simulation, the coordination and thrusts of both limbs were obtained and fully discussed.
2. Methods
2.1. Experiment
In order to acquire the body geometry and joint motion of a swimmer with unilateral transradial deficiency, an experiment was conducted. One female collegiate competitive swimmer with unilateral transradial deficiency (year: 19, stature: 1.56 m) participated in the experiment. The swimming motion of the participant was filmed by four digital cameras (Nikon Coolpix AW110) at the 60 Hz frame rate. The camera arrangement is shown in Figure 1a. Two cameras were placed for the underwater side views and one for the underwater front view. Another one camera was carried on land for the motion above the water surface. The participant was asked to swim with 80% effort, which was a common speed for daily training. The length of filming area was 10 m. In addition to filming the swimming motion, the entire body of the participant was filmed by a still camera from several viewpoints. This experiment was approved by the Ethics Committee of the Tokyo Institute of Technology. The procedure was fully explained to the participant and her guardians in advance, and the written consents of the participant and her guardians were obtained before the experiment.
From the still images taken of the entire body, the body geometry of the simulation model was determined. The stroke cycle, which is defined as the time for one cycle of the swimming motion, was 1.37 s in the experiment. This one stroke was divided into 24 time frames in the simulation model. For each time frame, the joint angles as the relative body motion were determined using the filmed images of the swimming motion. In actual procedure, the locations of joints and directions of the body segments of the model were superimposed on the filmed image on the analysis software “Swumsuit” (version 5.2.1, Swumsuit developer team, Tokyo, Japan [9]), and the operator adjusted the joint angles manually in the model so that both positions became consistent with each other, as shown in Figure 1b. The joint angles between time frames were interpolated using the Spline function automatically by the software. The swimming speed was also calculated by taking the difference of time when the swimmer passed 15 m and 5 m lines.
2.2. Simulation
The simulation model SWUM was designed to solve the six degrees-of-freedom absolute movement of the whole swimmer’s body as a single rigid body by time integration using the inputs of the swimmer’s body geometry and relative joint motion. The swimming speed, roll, pitch and yaw motions, propulsive efficiency, joint torques and so on, are computed as the output data. The swimmer’s body is represented by a series of 21 rigid body segments as follows: lower waist, upper waist, lower chest, upper chest, shoulders, neck, head, upper hip, lower hip, thighs (right and left), shanks (right and left), feet (right and left), upper arms (right and left), forearms (right and left) and hands (right and left). Each body segment is represented by a truncated elliptic cone. The unsteady fluid force and gravitational force are taken into account as external forces acting on the whole body. The unsteady fluid force is assumed to be the sum of the inertial force due to the added mass of the fluid, normal and tangential drag forces and buoyancy. These components are assumed to be computable, without solving the flow, from the local position, velocity, acceleration, direction, angular velocity, and angular acceleration for each part of the human body at each time step. The coefficients in this fluid force model were identified using the results of an experiment with a limb model and measurements of the drag acting on swimmers taking a glide position in the previous studies [8]. As a result of the identification, the fluid force model was found to have satisfactory performance. Many other studies by SWUM, including its validation and application, have been already conducted to date. Those include studies related to the crawl stroke, which are particularly relevant to the present study [10,11,12], as well as a study for swimmers with a physical disability [13].
The calculation was conducted in the nondimensional system which was normalized by the stroke cycle, swimmer’s stature and the water density. Twenty stroke cycles were calculated in order to eliminate the influence of the initial condition. The time step for time integration was 1/100. All the other calculation parameters were the same as the previous study [8], except for the fluid force coefficients for the tangential drag force, which was changed from 0.036 to 0.030 to adjust the swimming speed.
3. Results and Discussion
The simulated swimming motion for the last (20th) stroke cycle (t* = 19.0 ~ 20.0) is shown in Figure 2. Note that the symbol t* is nondimensional time normalized by the stroke cycle. It was found that the stable propulsion was obtained as the result of calculation. The swimming speed was 1.17 m/s, which was consistent with the experimental value of 1.21 m/s within the error of 4%. This consistency suggested the validity of the simulation model.
The coordination of the upper limbs are schematically shown in Figure 3. In this figure, the length of one stroke cycle (t* = 19.0 ~ 20.0 in Figure 2) is shown as 100%. For the intact limb, common phases in the crawl stroke were seen, that is, first, the entry and glide, next, the propulsive phase including the catch, pull and push, and finally, the recovery of the limb above the water surface. For the deficient limb, however, there was a particular phase after the propulsive phase (hereinafter called “finish”). At this phase, the limb was still underwater although the significant thrust was not observed in the simulation. In addition, the recovery phase was significantly shorter than that of the intact limb. The possible reason for these results is that the mass of the deficient limb was significantly smaller than that of the intact limb. The fast recovery motion was realized by the light limb, and the finish phase appeared in order to adjust the total stroke time of the deficient limb. With respect to the coordination of both limbs, the phase lag between both limbs generally should become 50% of one stroke cycle, if both limbs move symmetrically. However, in the present study, it was found that the timing of the underwater stroke of the deficient limb was clearly earlier, as shown in Figure 3. Indeed, the propulsive phase of the deficient limb began only 33% later than the intact limb. Indeed, this tendency was opposite to that in the previous study [3]. The possible reasons for this contradiction were the differences in the physical characteristics and/or motion skills of the participants. However, it was difficult to find definite reasons in this study due to the insufficient number of participants. To answer this problem, further investigation with more participants will be necessary.
The time histories of thrusts produced by the limbs in the simulation are shown in Figure 4. The values were calculated by taking the sum of the fluid forces acting on the upper limb (upper arm, forearm and hand) in the propulsive direction. For the intact limb, the common two peaks by pull and push motions were found. In the pull motion around t* = 19.3, the limb pulled the water mainly by flexion and adduction at the shoulder. In the push motion around t* = 19.5, the hand pushed the water mainly by elbow extension. The maximum values of the first and second peaks reached 40 and 100 N, respectively. For the deficient limb, on the other hand, there was the only small and short peak. Its maximum value was about 20 N. This peak was considered to correspond to the pull motion of the intact limb, that is, it was produced by the flexion and adduction at the shoulder. The calculated total impulses in the propulsive direction were 18.83 Ns for the intact limb and 1.32 Ns for the deficient limb, respectively. It suggests that the deficient limb contributed to the propulsion only for 7% of the intact limb. To consider this result, the contribution of the intact upper limb segments to thrust was calculated. The calculated ratios of contribution for the intact upper arm, forearm and hand were 0.95%, 16.2% and 82.8%, respectively. Indeed, the hand contributed much to produce the thrust. Therefore, it was suggested that a swimmer without a hand due to deficiency obtains a thrust of 17% only, and that a swimmer without a hand and forearm obtains thrust of 1% only. It was also suggested that the participant of the present study increased the thrust of the deficient limb from 1% to 7% by improving the stroke.
For the development of a training paddle, the above-mentioned findings obtained in the present study should be taken into account. It was found that the stroke of the deficient limb was different from that of the intact limb. Therefore, the desirable paddle will not be the one which is aimed at just restoring the function of the deficient part, but the one which increases thrust and load to the swimmer for both upper limbs equally by taking the difference in stroke into account.
4. Conclusions
The crawl stroke motion by a swimmer with unilateral transradial deficiency was analyzed by the swimming human simulation model SWUM. Overall, significant asymmetry between the intact and deficient limbs was found. It will be necessary to consider the findings obtained in this study when a training paddle is designed in the future work. The limitation of this study was that the participant was only one swimmer. It was difficult to derive general conclusions from the results of the present study. For that purpose, further analyses with more participants will be necessary.
Acknowledgments
The authors would like to thank the Swimming Team of University of Tsukuba, especially for Hideki Takagi, Yasuo Sengoku, Shin Sakai and Daiki Koga, for cooperation to the experiment. The authors also would like to thank the participant.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Nakashima, M.; Favreau, A.; Terada, M. Design and development of a paddle for a swimmer with trans-radial amputation. In Proceedings of the 17th International Symposium on Computer Simulation in Biomechanics, Canmore, AB, Canada, 28–30th July 2019; pp. 79–80. [Google Scholar]
- Osborough, C.; Payton, C.; Daly, D. Relationships between the front crawl stroke parameters of competitive unilateral arm amputee swimmers, with selected anthropometric characteristics. J. Appl. Biomech. 2009, 25, 304–312. [Google Scholar] [CrossRef] [PubMed]
- Osborough, C.; Payton, C.; Daly, D. Influence of swimming speed on inter-arm coordination in competitive unilateral arm amputee front crawl swimmers. Hum. Mov. Sci. 2010, 29, 921–931. [Google Scholar] [CrossRef]
- Osborough, C.; Payton, C.; Daly, D. Effect of swim speed on leg-to-arm coordination in unilateral arm amputee front crawl swimmers. J. Sports Sci. 2015, 33, 1523–1531. [Google Scholar] [CrossRef] [PubMed]
- Figueiredo, P.; Willing, R.; Alves, F.; Vilas-Boas, J. Biophysical characterization of a swimmer with a unilateral arm amputation: A case study. Int. J. Sports Physiol. Perform. 2014, 9, 1050–1053. [Google Scholar] [CrossRef] [PubMed]
- Lecrivain, G.; Slaouti, A.; Payton, C.; Kennedy, I. Using reverse engineering and computational fluid dynamics to investigate a lower arm amputee swimmer’s performance. J. Biomech. 2008, 41, 2855–2859. [Google Scholar] [PubMed]
- Lecrivain, G.; Payton, C.; Slaouti, A.; Kennedy, I. Effect of body roll amplitude and arm rotation speed on propulsion of arm amputee swimmers. J. Biomech. 2010, 43, 1111–1117. [Google Scholar] [CrossRef] [PubMed]
- Nakashima, M.; Miura, Y.; Satou, K. Development of swimming human simulation model considering rigid body dynamics and unsteady fluid force for whole body. J. Fluid Sci. Tech. 2007, 2, 56–67. [Google Scholar] [CrossRef]
- Swimming Human Simulation Software “Swumsuit”. Available online: http://www.swum.org/swumsuit/ (accessed on 9 November 2019).
- Nakashima, M. Mechanical study of standard six beat front crawl swimming by using swimming human simulation model. J. Fluid Sci. Tech. 2007, 2, 290–301. [Google Scholar] [CrossRef]
- Nakashima, M.; Maeda, S.; Miwa, T.; Ichikawa, H. Optimizing simulation of the arm stroke in crawl swimming considering muscle strength characteristics of athlete swimmers. J. Biomech. Sci. Eng. 2012, 7, 102–117. [Google Scholar] [CrossRef]
- Nakashima, M.; Ono, A. Maximum joint torque dependency of the crawl swimming with optimized arm stroke. J. Biomech. Sci. Eng. 2014, 9, 1–9. [Google Scholar] [CrossRef]
- Nakashima, M.; Nemoto, C.; Kishimoto, T.; Terada, M.; Ikuta, Y. Optimizing simulation of arm stroke in freestyle for swimmers with hemiplegia. Mech. Eng. J. 2018, 5, 17–00377. [Google Scholar] [CrossRef]
Figure 1.
Experimental setup and screenshot of analysis software. (a) Experimental setup to film the swimming motion of the participant; (b) Screenshot of analysis software “Swumsuit” to determine the joint angles.
Figure 1.
Experimental setup and screenshot of analysis software. (a) Experimental setup to film the swimming motion of the participant; (b) Screenshot of analysis software “Swumsuit” to determine the joint angles.

Figure 2.
Simulated swimming motion for the last stroke cycle. (a) Left side (intact limb side) view; (b) Right side (deficient limb side) view. The red lines from the swimmer’s body represent the point of application, direction and magnitude of the fluid forces acting on the swimmer. The symbol t* is the nondimensional time normalized by the stroke cycle.
Figure 2.
Simulated swimming motion for the last stroke cycle. (a) Left side (intact limb side) view; (b) Right side (deficient limb side) view. The red lines from the swimmer’s body represent the point of application, direction and magnitude of the fluid forces acting on the swimmer. The symbol t* is the nondimensional time normalized by the stroke cycle.
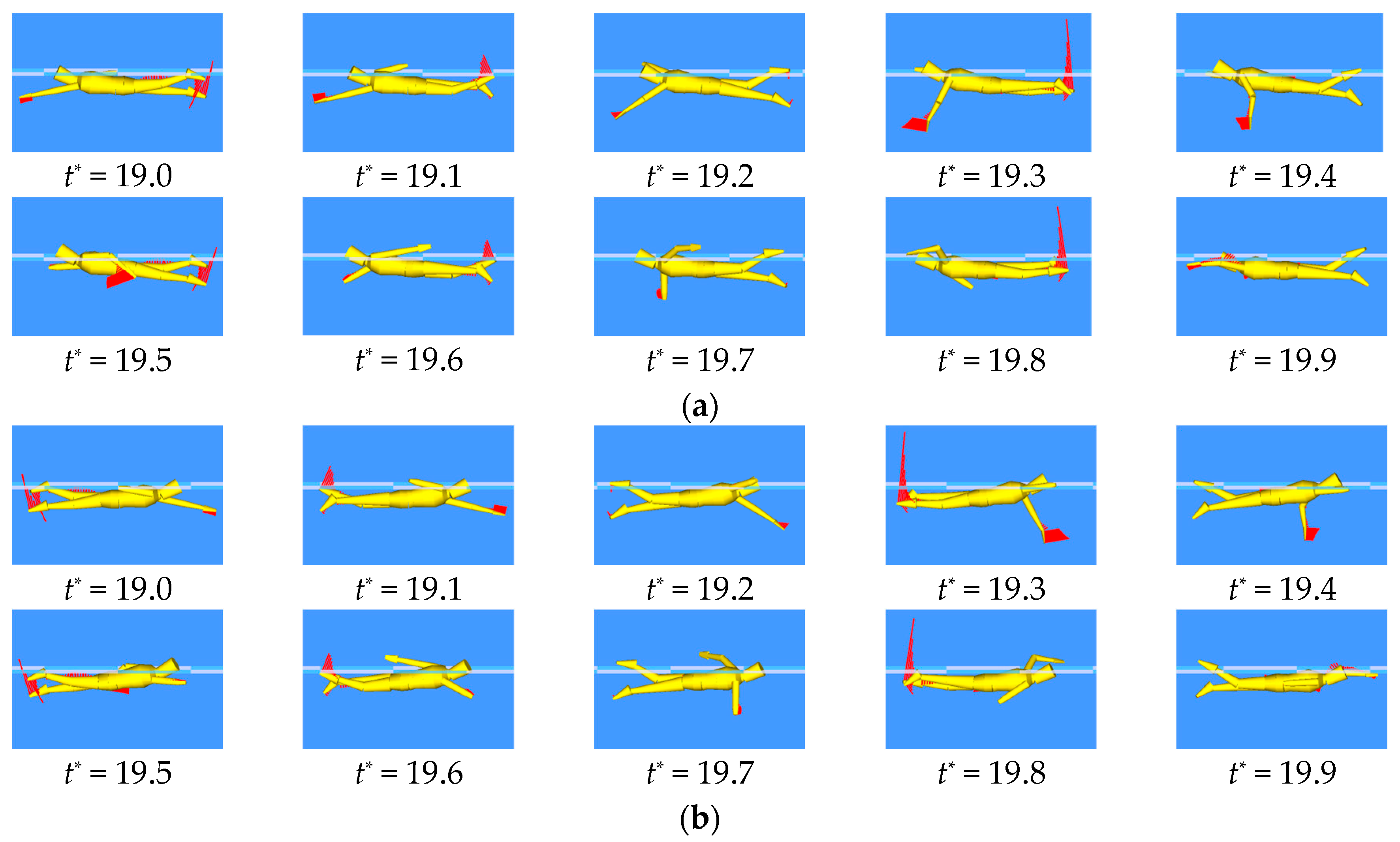
Figure 3.
Schematic figure to show the coordination of the right (deficient side) and left (intact side) arms. The horizontal direction represents the time. The entry and glide phase is from the arm entry to the water and to the beginning of thrust production. The propulsive phase is the period when the thrust is produced by the arm. The recovery phase is the period when the arm is above the water surface. During the finish phase, which existed only for the right arm, the arm did not produce the thrust although the arm is still underwater.
Figure 3.
Schematic figure to show the coordination of the right (deficient side) and left (intact side) arms. The horizontal direction represents the time. The entry and glide phase is from the arm entry to the water and to the beginning of thrust production. The propulsive phase is the period when the thrust is produced by the arm. The recovery phase is the period when the arm is above the water surface. During the finish phase, which existed only for the right arm, the arm did not produce the thrust although the arm is still underwater.
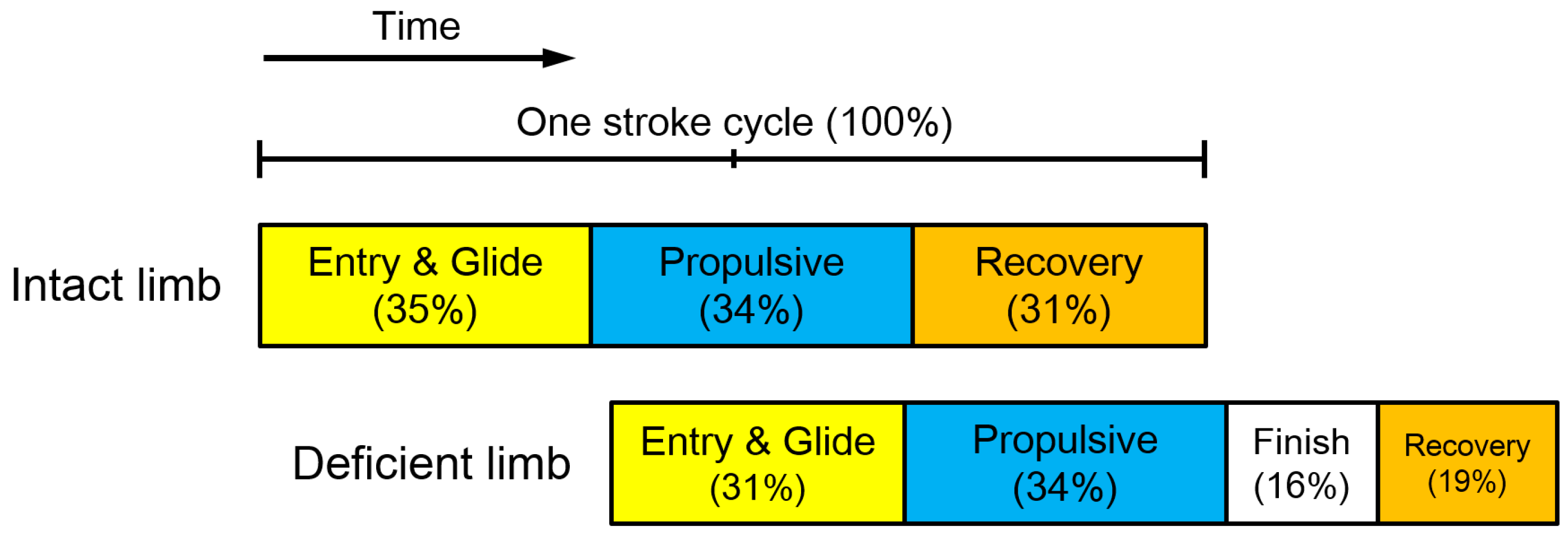
Figure 4.
Time histories of thrust produced by limbs in the simulation. (a) Intact limb; (b) Deficient limb.
Figure 4.
Time histories of thrust produced by limbs in the simulation. (a) Intact limb; (b) Deficient limb.

© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Nakashima, M.; Tebbe, J. Analysis of Swimming Motion for a Swimmer with Unilateral Transradial Deficiency to Develop Better Training Paddles. Proceedings 2020, 49, 9. https://doi.org/10.3390/proceedings2020049009
AMA Style
Nakashima M, Tebbe J. Analysis of Swimming Motion for a Swimmer with Unilateral Transradial Deficiency to Develop Better Training Paddles. Proceedings. 2020; 49(1):9. https://doi.org/10.3390/proceedings2020049009
Chicago/Turabian StyleNakashima, Motomu, and Jacob Tebbe. 2020. "Analysis of Swimming Motion for a Swimmer with Unilateral Transradial Deficiency to Develop Better Training Paddles" Proceedings 49, no. 1: 9. https://doi.org/10.3390/proceedings2020049009