
AMR Sensor Array Design for the Realization of a 3D Magnetic Tactile Sensor †
by
 , ,
, ,
Stefano Lumetti
* ,
,
Perla Malagò
,
Peter-Andreas Stürmer
,
Francisco Ferreira Relvão
and
Michael Ortner
Silicon Austria Labs GmbH, Europastraße 12, St. Magdalen, 9524 Villach, Austria
*
Author to whom correspondence should be addressed.
†
Presented at the XXXV EUROSENSORS Conference, Lecce, Italy, 10–13 September 2023.
Proceedings 2024, 97(1), 198; https://doi.org/10.3390/proceedings2024097198
Published: 22 April 2024
{kind=link}
Abstract
:The design of arrays of anisotropic magnetoresistive (AMR) sensors capable of detecting and reconstructing the 3D motion of a permanent magnet, and thus, suitable for the development of a 3D magnetic tactile sensor, is reported. The proposed structure allows for probing the 3D magnet displacements—and, hence, to infer the three components of the applied force—via a purely planar arrangement of monolithically microfabricated AMR sensors. The concept presented here also holds potential for the realization of a wide spectrum of easy-to-fabricate, miniaturized and low-cost sensors suitable for the detection of a broad variety of physical observables.
1. Introduction
State-of-the-art tactile sensors relying on magnetic principles measure the change in flux density resulting from the applied force, and usually exploit magnetic field sensors based on the conventional Hall effect [1]. Compared to the latter, magnetoresistive (MR) sensors feature higher sensitivity, better signal-to-noise ratio and enhanced thermal stability. In this context, AMR sensors are attractive, owing to their relatively simple and cheap CMOS-compatible fabrication process, which makes them easily prone to miniaturization, thereby offering the possibility to achieve high sensitivity at low cost in a relatively compact footprint. Here, we discuss the design of planar AMR sensor arrays suitable for 3D magnet motion tracking, which lays the foundation for realizing miniaturized 3D tactile sensors that are sensitive to both normal and shear components of the vector force.
2. Materials and Methods
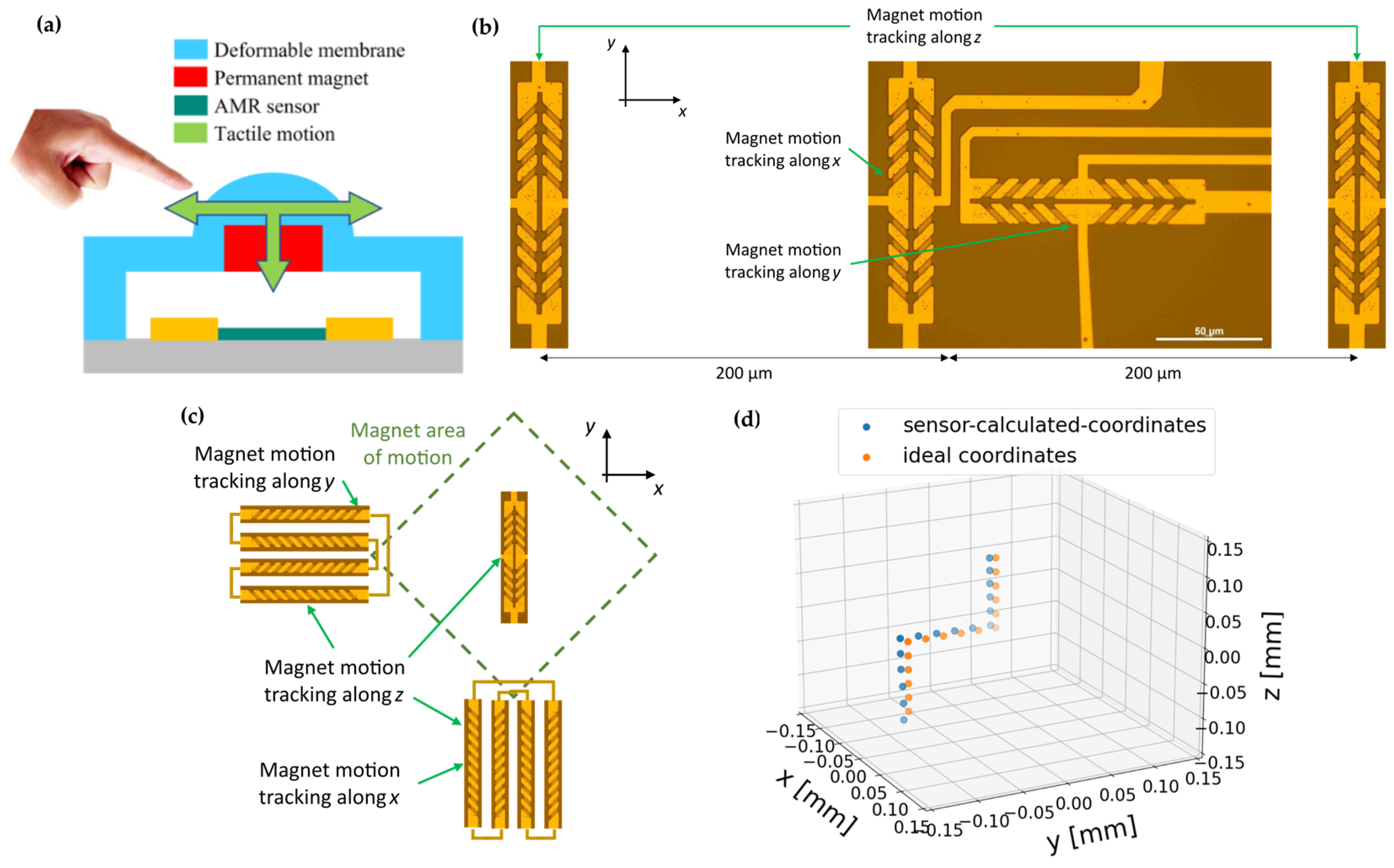
The proposed tactile sensor structure (see Figure 1a) comprises a permanent magnet embedded in a deformable membrane and located above a fixed substrate carrying a planar array of AMR sensors. The latter are made of thin Permalloy (Ni80Fe20) stripes exhibiting a linear MR response as a result of barber-pole biasing [2] (see Figure 1b,c). Micromagnetic simulations based on finite-difference methods (MuMax3) [3] are performed to calculate the response of the AMR sensors. The magnetic field generated by the permanent magnet is computed via analytical expressions implemented in the Magpylib Python package [4] and is used as external magnetic field input for micromagnetic simulations to derive the AMR sensor response. Finite-element calculations (Ansys Maxwell 2022 R1) are applied to simulate the electric current distribution within the Permalloy stripes in the barber-pole configuration in order to optimize their design.
3. Discussion
Two possible AMR sensor array designs have been identified which are suitable for 3D magnet motion tracking. In both cases, the Permalloy stripes are arranged in Wheatstone bridges (WBs). The first design (see Figure 1b) comprises two central WBs reconstructing the magnet motion in the xy plane and two additional lateral WBs whose linearly combined outputs enable the detection of the magnet displacement along z. The second design (see Figure 1c) includes two WBs at the edges of the magnet motion area allowing its xy position to be inferred via a triangulation algorithm and a central WB whose output, combined with the previous two, enables the detection of the magnet z position.
Sub-mm NdFeB magnets are considered to test and validate the two designs. The AMR sensors consist of 15-nm-thick, few-µm-wide and few-tens-of-µm-long Permalloy stripes. The first AMR array design allows the detection of the magnet position with <10-µm accuracy within a motion range of 600 µm along x and y and of 300 µm along z (see Figure 1d), whereas the second array design can cover a wider range of magnet motion in all directions but at the cost of a 5–10 times lower accuracy.
In summary, these results show the possibility to track the displacements of a permanent magnet by means of properly designed and monolithically manufactured planar arrays of AMR sensors. Future work will be devoted to sensor design optimization as well as experimental validation. The device concept reported here is promising for the fabrication of novel miniaturized 3D tactile sensors and its versatility makes it also suitable for realizing easy-to-fabricate and low-cost sensors probing a large spectrum of other physical observables (e.g., pressure, fluid flow, acceleration, etc.).
Author Contributions
Conceptualization, P.M., S.L., P.-A.S., F.F.R. and M.O.; methodology, P.M., S.L., P.-A.S. and F.F.R.; software, P.M., P.-A.S. and F.F.R.; validation, S.L., P.M., P.-A.S. and F.F.R.; formal analysis, S.L., P.M., P.-A.S. and F.F.R.; investigation, P.M., S.L., P.-A.S. and F.F.R.; resources, S.L., P.M. and M.O.; data curation, S.L. and P.M.; writing—original draft preparation, S.L.; writing—review and editing, S.L. and P.M.; visualization, S.L. and P.M.; supervision, P.M. and S.L.; project administration, S.L.; funding acquisition, S.L., P.M. and M.O. All authors have read and agreed to the published version of the manuscript.
Funding
This work has been supported by Silicon Austria Labs GmbH (SAL), owned by the Republic of Austria, the Styrian Business Promotion Agency (SFG), the federal state of Carinthia, the Upper Austrian Research (UAR), and the Austrian Association for the Electric and Electronics Industry (FEEI).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The raw data supporting the conclusions of this article will be made available by the authors on request.
Conflicts of Interest
The authors declare no conflicts of interest. Silicon Austria Labs GmbH has no potential commercial conflict of interest.
References
- Dahiya, R.S.; Metta, G.; Valle, M.; Sandini, G. Tactile Sensing—From Humans to Humanoids. IEEE Trans. Robot. 2010, 26, 1–20. [Google Scholar] [CrossRef]
- Kuijk, K.E.; van Gestel, W.J.; Gorter, F.W. The barber pole, a linear magnetoresistive head. IEEE Trans. Magn. 1975, 11, 1215–1217. [Google Scholar] [CrossRef]
- Vansteenkiste, A.; Leliaert, J.; Dvornik, M.; Helsen, M.; Garcia-Sanchez, F.; Van Waeyenberge, B. The design and verification of MuMax3. AIP Adv. 2014, 4, 107133. [Google Scholar] [CrossRef]
- Ortner, M.; Coliado Bandeira, L.G. Magpylib: A free Python package for magnetic field computation. SoftwareX 2020, 11, 100466. [Google Scholar] [CrossRef]
Figure 1.
(a) Three-dimensional tactile sensor structure. (b) First AMR sensor array design. (c) Second AMR sensor array design. (d) Three-dimensional magnet motion reconstruction via the first AMR sensor array design.
Figure 1.
(a) Three-dimensional tactile sensor structure. (b) First AMR sensor array design. (c) Second AMR sensor array design. (d) Three-dimensional magnet motion reconstruction via the first AMR sensor array design.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Lumetti, S.; Malagò, P.; Stürmer, P.-A.; Relvão, F.F.; Ortner, M. AMR Sensor Array Design for the Realization of a 3D Magnetic Tactile Sensor. Proceedings 2024, 97, 198. https://doi.org/10.3390/proceedings2024097198
AMA Style
Lumetti S, Malagò P, Stürmer P-A, Relvão FF, Ortner M. AMR Sensor Array Design for the Realization of a 3D Magnetic Tactile Sensor. Proceedings. 2024; 97(1):198. https://doi.org/10.3390/proceedings2024097198
Chicago/Turabian StyleLumetti, Stefano, Perla Malagò, Peter-Andreas Stürmer, Francisco Ferreira Relvão, and Michael Ortner. 2024. "AMR Sensor Array Design for the Realization of a 3D Magnetic Tactile Sensor" Proceedings 97, no. 1: 198. https://doi.org/10.3390/proceedings2024097198