
Development of a Novel Implementation of a Remotely Piloted Aircraft System over 25 kg for Hyperspectral Payloads
 , , , ,
, , , ,  ,
,
Abstract
:1. Introduction

2. Materials and Methods
2.1. RPAS and HSI Sensor Description
2.1.1. DJI Agras T30

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristic | Value |
|---|---|
| General | |
| Type | Hexacopter |
| Weight without payload * (MTOW) | 22.6 kg (78 kg) |
| Dimensions with arms and blades unfolded | 2858 mm × 2685 mm × 790 mm |
| Control System | |
| Flight control software | DJI Agras Pilot |
| Hovering precision with D-RTK enabled | ±10 cm horizontal and vertical |
| GNSS frequency bands | GPS L1, GLONASS F1 and Galileo E1 |
| RTK frequency bands | GPS L1/L2, GLONASS F1/F2, BeiDou B1/B2 and Galileo E1/E5 |
| RTK base station | DJI DRTK-2 |
| Operation Limitations | |
| Maximum manufacturer-stated sustained wind speed | 8 m/s |
| Recommended operating ambient temperature | 0–45 °C |
| Firmware limited flight altitude | 100 m AGL (328 ft) |
| Power System | |
| Max power consumption | 11,000 W |
| Propeller size (diameter × pitch) | 38 × 20 inch |
| Battery weight, capacity, voltage | 10.1 kg, 29,000 mAh, 51.8 V |
| Charging time ** | ~15 min |
| Maximum speed (auto mode) | 7 m/s |
| Maximum speed (manual mode) | 10 m/s |
| Additional safety mechanisms | |
| Forward and backward FPV cameras | 129 ° horizontal × 82 ° vertical field of view |
| IP rating (RPAS) | IP67 |
| IP rating (battery) | IP54 with board-level potting protection |
| Component | Description | Weight (kg) |
|---|---|---|
| T30 without battery * | Includes:
| 22.60 |
| T30 battery | BAX501-29,000 mAh-51.8 V | 9.94 |
| Cables | Includes communication and power cables | 0.24 |
| Payload battery | LiPo 8000 6S2P 22.2v | 1.14 or 1.12 ** |
| Gimbal with mounting plate | Gremsy AEVO, includes mounting plate and payload adaptor plate | 2.68 |
| VS-620 | Full-range Mjolnir HSI | 6.66 |
| S-620 | SWIR Mjolnir HSI | 4.78 |
| Mjolnir S-620 replica | Wooden replica of the S-620 | 4.70 |
2.1.2. HySpex Mjolnir VS-620/S-620
2.2. Components, Design and Fabrication Approach and Electronics
2.2.1. Components
2.2.2. Design and Fabrication Approach
2.2.3. Power
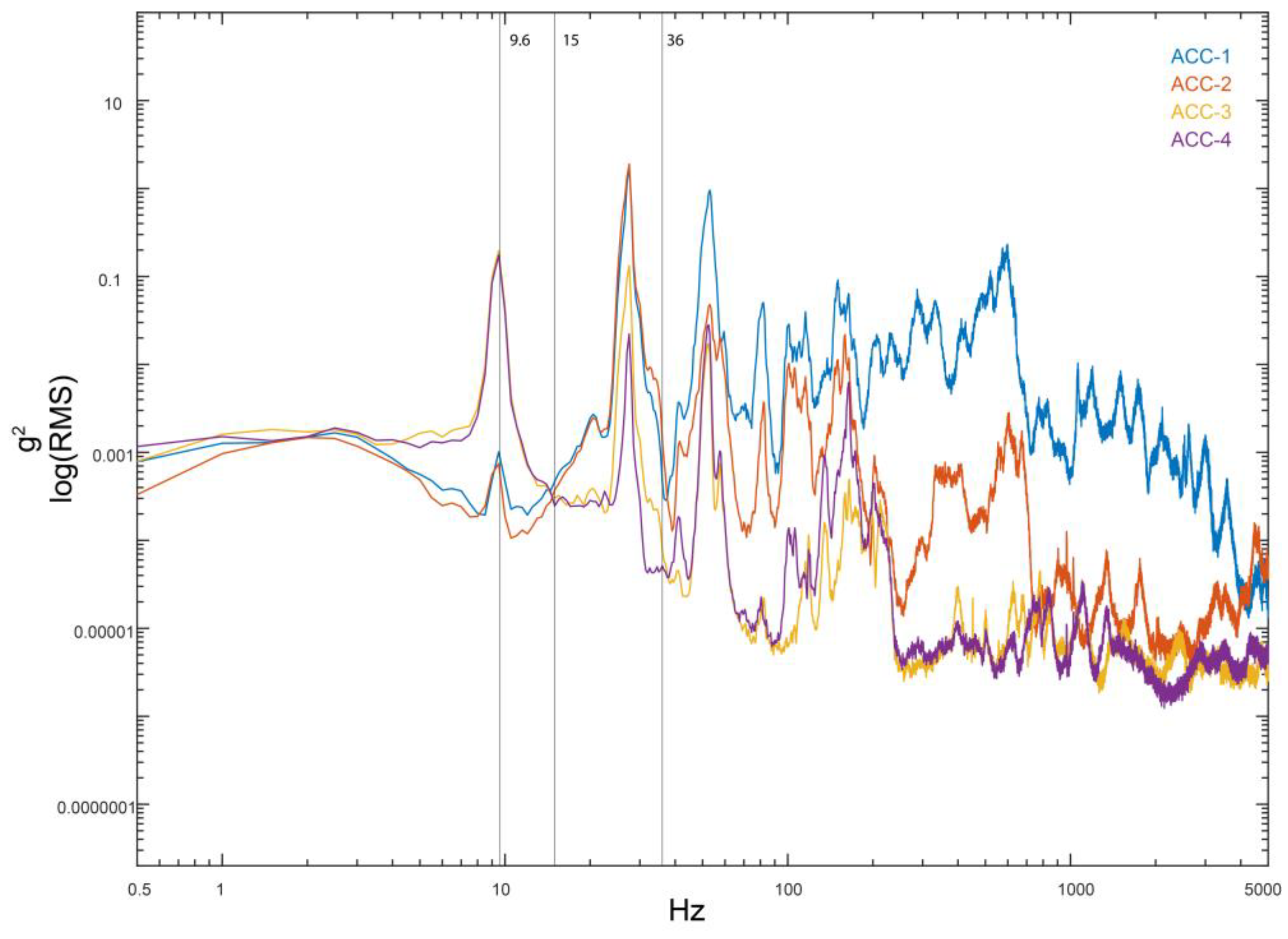
2.3. Vibration Test
2.4. Wind Tunnel Test
2.5. Special Flight Operations Certificate (SFOC) Considerations for Flight Testing
2.6. Data Collection, Processing and Analysis
3. Results
3.1. T30 Payload Integration
3.1.1. Vibration Test
3.1.2. Wind Tunnel Test
3.2. Flight Performance at MB
3.2.1. Operational Flight Conditions
3.2.2. Gimbal Performance
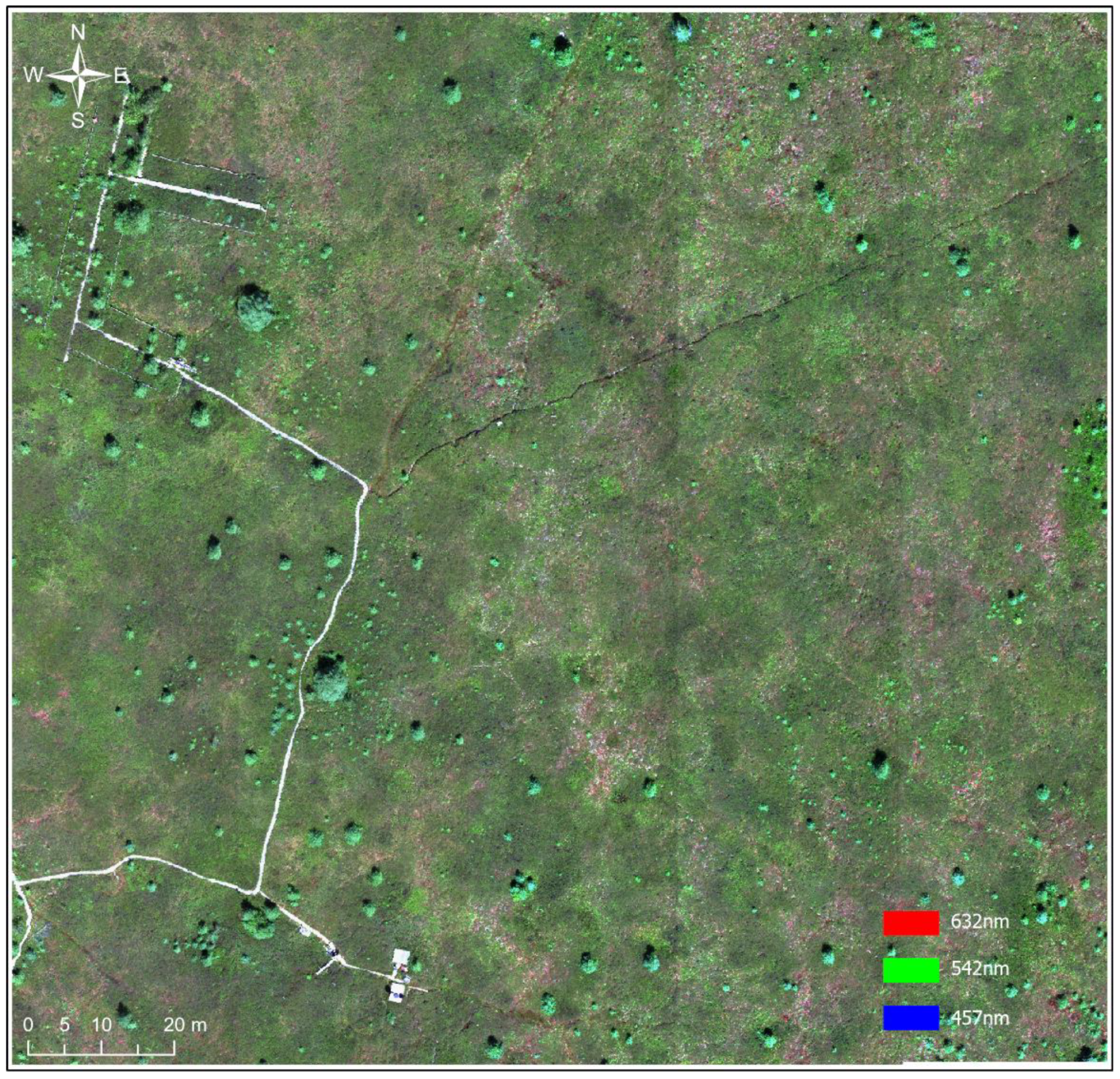
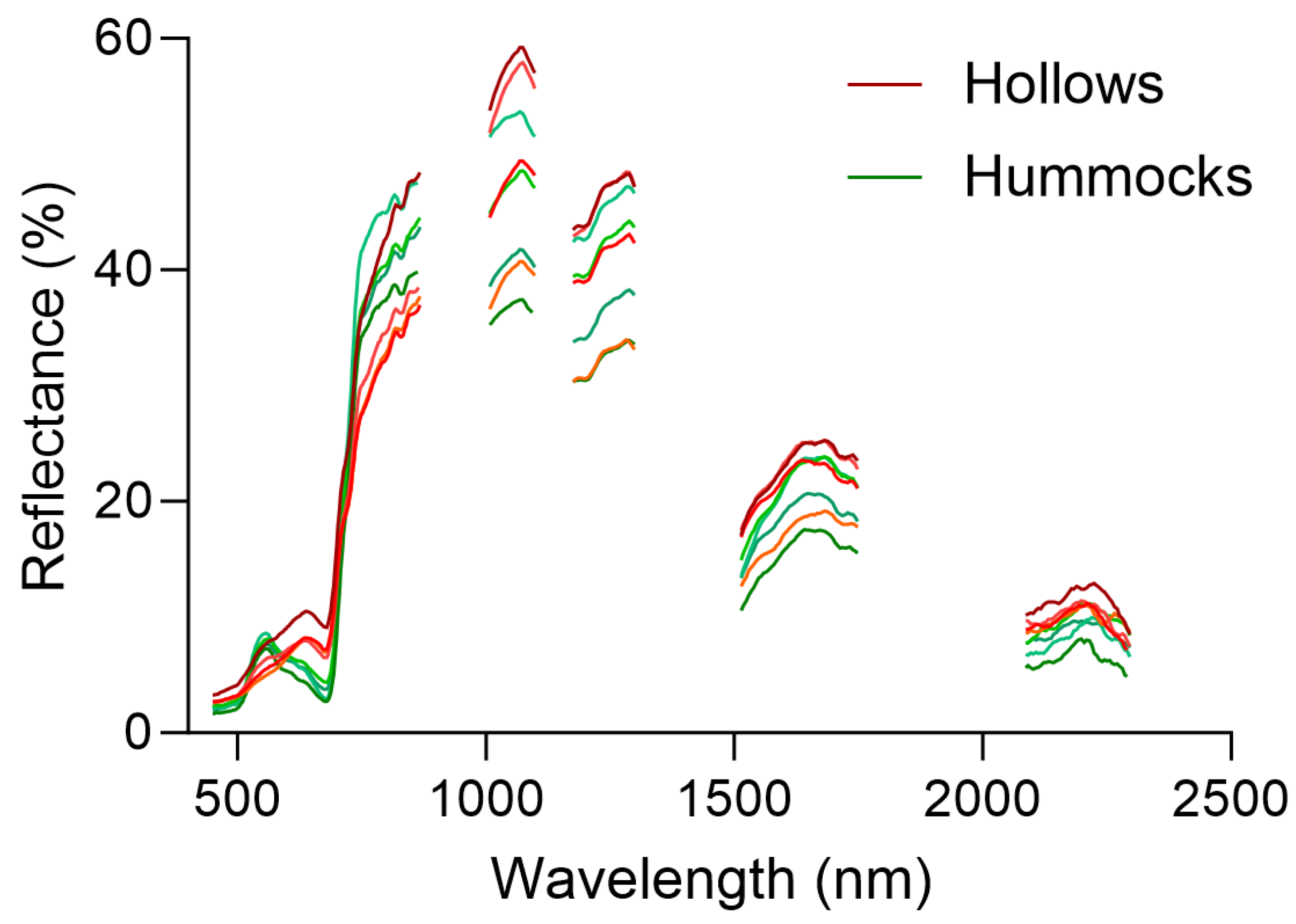
3.3. Hyperspectral Results
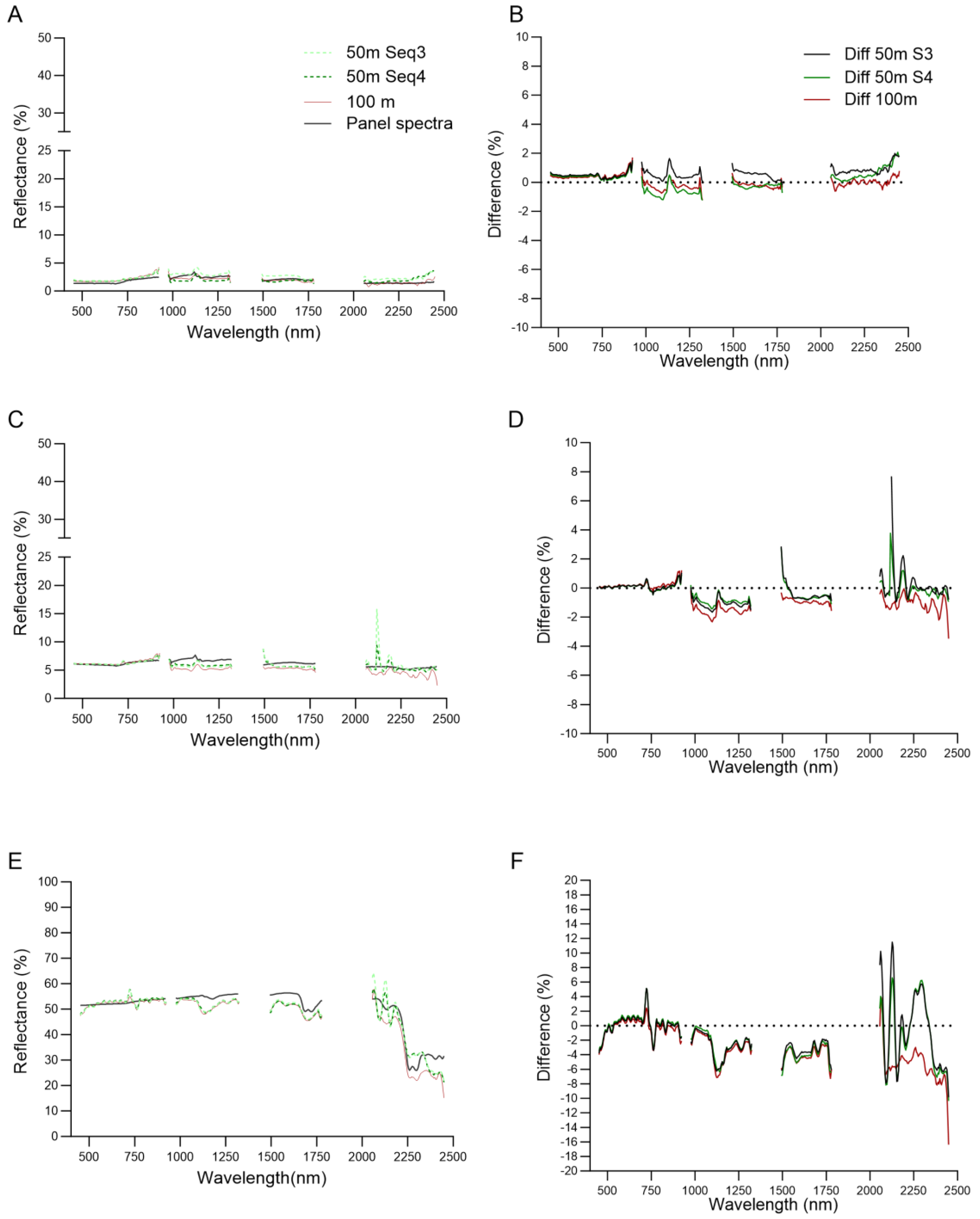
3.3.1. Radiometric Assessment
3.3.2. Geometric Assessment
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
| Section | Main Components | Main Subcomponents |
|---|---|---|
| RPAS Operation/Risk Assessment | Concept of Operations (CONOPS) | Contact information |
| Purpose of operation | ||
| Operational requirements | ||
| Procedures and safety risks | ||
| Locations | ||
| Description of RPAS | ||
| How operation carried out | ||
| SORA | RPAS information | |
| Operational volume * | ||
| Contingency volume | ||
| Application of GRC | ||
| Application of ARC | ||
| SAIL Determination | ||
| Adjacent airspace considerations | ||
| Detect And Avoid (DAA) | ||
| OSO Substantiation | ||
| Company Operations Manual (COM) | ||
| Safety plan | Aviation safety | |
| Public safety | ||
| Emergency contingency plan | Aircraft loss airborne (fly-away) | |
| Aircraft loss on ground | ||
| Minor personal injury | ||
| Battery failsafe | ||
| Operation in the interest of public goods | ||
| Risk mitigation of loss of control of RPAS trajectory | ||
| RPAS equipment and capability | Manufacturer performance declaration | RPAS description |
| Description of modification from manufacturer’s declaration | ||
| Description if new RPAS in development | ||
| Color scheme and illumination | ||
| Command and Control System description | ||
| RPAS handoff methodology | ||
| Description of payloads | ||
| Fuel/energy sufficient for planned flight * | ||
| Maintenance | Maintenance manual | |
| Maintenance schedule | ||
| Primary parts requirements maintenance/replacement | ||
| Maintenance logs | ||
| Person responsible for maintenance | ||
| Training | ||
| Applicant/Operator/Pilot | How operation will be carried out | Operation characteristics |
| Specific operation steps | ||
| Site survey * | ||
| RPAS manual | ||
| Crew certification and compliance | ||
| Pilot qualifications | ||
| Crew member fitness | ||
| Weather minima * | ||
| Separation and collision avoidance | ||
| Normal and emergency procedures | ||
| Air traffic control services coordination | ||
| Radio communication technology | ||
| Proof of liability insurance | ||
| Accident and incident reporting procedures |
References
- Zarco-Tejada, P.J.; Guillén-Climent, M.L.; Hernández-Clemente, R.; Catalina, A.; González, M.R.; Martín, P. Estimating leaf carotenoid content in vineyards using high resolution hyperspectral imagery acquired from an unmanned aerial vehicle (UAV). Agric. For. Meteorol. 2013, 171–172, 281–294. [Google Scholar] [CrossRef]
- Arroyo-Mora, J.P.; Kalacska, M.; Inamdar, D.; Soffer, R.; Lucanus, O.; Gorman, J.; Naprstek, T.; Schaaf, E.S.; Ifimov, G.; Elmer, K.; et al. Implementation of a UAV–Hyperspectral Pushbroom Imager for Ecological Monitoring. Drones 2019, 3, 12. [Google Scholar] [CrossRef]
- Diruit, W.; Le Bris, A.; Bajjouk, T.; Richier, S.; Helias, M.; Burel, T.; Lennon, M.; Guyot, A.; Ar Gall, E. Seaweed Habitats on the Shore: Characterization through Hyperspectral UAV Imagery and Field Sampling. Remote Sens. 2022, 14, 3124. [Google Scholar] [CrossRef]
- Cao, J.; Liu, K.; Zhuo, L.; Liu, L.; Zhu, Y.; Peng, L. Combining UAV-based hyperspectral and LiDAR data for mangrove species classification using the rotation forest algorithm. Int. J. Appl. Earth Obs. Geoinf. 2021, 102, 102414. [Google Scholar] [CrossRef]
- Shi, Y.; Wang, T.; Skidmore, A.K.; Holzwarth, S.; Heiden, U.; Heurich, M. Mapping individual silver fir trees using hyperspectral and LiDAR data in a Central European mixed forest. Int. J. Appl. Earth Obs. Geoinf. 2021, 98, 102311. [Google Scholar] [CrossRef]
- Parsons, M.; Bratanov, D.; Gaston, K.J.; Gonzalez, F. UAVs, Hyperspectral Remote Sensing, and Machine Learning Revolutionizing Reef Monitoring. Sensors 2018, 18, 2026. [Google Scholar] [CrossRef] [PubMed]
- Chancia, R.; Bates, T.; Vanden Heuvel, J.; van Aardt, J. Assessing Grapevine Nutrient Status from Unmanned Aerial System (UAS) Hyperspectral Imagery. Remote Sens. 2021, 13, 4489. [Google Scholar] [CrossRef]
- Lu, B.; Dao, P.D.; Liu, J.; He, Y.; Shang, J. Recent Advances of Hyperspectral Imaging Technology and Applications in Agriculture. Remote Sens. 2020, 12, 2659. [Google Scholar] [CrossRef]
- Arroyo-Mora, J.P.; Kalacska, M.; Løke, T.; Schläpfer, D.; Coops, N.C.; Lucanus, O.; Leblanc, G. Assessing the impact of illumination on UAV pushbroom hyperspectral imagery collected under various cloud cover conditions. Remote Sens. Environ. 2021, 258, 112396. [Google Scholar] [CrossRef]
- Aasen, H.; Honkavaara, E.; Lucieer, A.; Zarco-Tejada, P. Quantitative Remote Sensing at Ultra-High Resolution with UAV Spectroscopy: A Review of Sensor Technology, Measurement Procedures, and Data Correction Workflows. Remote Sens. 2018, 10, 1091. [Google Scholar] [CrossRef]
- Nex, F.; Armenakis, C.; Cramer, M.; Cucci, D.A.; Gerke, M.; Honkavaara, E.; Kukko, A.; Persello, C.; Skaloud, J. UAV in the advent of the twenties: Where we stand and what is next. ISPRS J. Photogramm. Remote Sens. 2022, 184, 215–242. [Google Scholar] [CrossRef]
- Wallace, L.; Lucieer, A.; Malenovský, Z.; Turner, D.; Vopěnka, P. Assessment of Forest Structure Using Two UAV Techniques: A Comparison of Airborne Laser Scanning and Structure from Motion (SfM) Point Clouds. Forests 2016, 7, 62. [Google Scholar] [CrossRef]
- Lucieer, A.; Malenovský, Z.; Veness, T.; Wallace, L. HyperUAS—Imaging Spectroscopy from a Multirotor Unmanned Aircraft System. J. Field Robot. 2014, 31, 571–590. [Google Scholar] [CrossRef]
- Storch, T.; Honold, H.-P.; Chabrillat, S.; Habermeyer, M.; Tucker, P.; Brell, M.; Ohndorf, A.; Wirth, K.; Betz, M.; Kuchler, M.; et al. The EnMAP imaging spectroscopy mission towards operations. Remote Sens. Environ. 2023, 294, 113632. [Google Scholar] [CrossRef]
- Tanii, J.; Inada, H.; Tachikawa, T.; Kashimura, O.; Iwasaki, A.; Ito, Y.; Imatani, R.; Ikehara, K. On-Orbit Performance of Hyperspectral Imager Suite (HISUI); SPIE: Bellingham, WA, USA, 2022; Volume 12264. [Google Scholar]
- Shaik, R.U.; Periasamy, S.; Zeng, W. Potential Assessment of PRISMA Hyperspectral Imagery for Remote Sensing Applications. Remote Sens. 2023, 15, 1378. [Google Scholar] [CrossRef]
- Government of Canada. Canadian Aviation Regulations (SOR/96-433). Canadian Aviation Regulations (CARs) and Standards. Part IX—Remotely Piloted Aircraft Systems. Available online: https://tc.canada.ca/en/corporate-services/acts-regulations/list-regulations/canadian-aviation-regulations-sor-96-433 (accessed on 1 September 2023).
- Government of Canada. Civil Aviation Remotely Piloted Aircraft Systems Task Force. Application Guidelines for a Special Flight Operations Certificate for a Remotely Piloted Aircraft System (SFOC-RPAS). Available online: https://tc.canada.ca/en/aviation/reference-centre/advisory-circulars/advisory-circular-ac-no-903-001 (accessed on 1 October 2023).
- Federal Aviation Administration. United States Code 2023. PART 107—Small Unmanned Aircraft System. Available online: https://www.ecfr.gov/current/title-14/chapter-I/subchapter-F/part-107 (accessed on 1 October 2023).
- Federal Aviation Administration. Section 44807: Special Authority for Certain Unmanned Aircraft Systems. Available online: https://www.faa.gov/uas/advanced_operations/certification/section_44807 (accessed on 1 October 2023).
- European Union Aviation Safety Agency. Open Category-Civil Drones. Available online: https://www.easa.europa.eu/en/domains/civil-drones/drones-regulatory-framework-background/open-category-civil-drones (accessed on 1 October 2023).
- European Union Aviation Safety Agency. Standard Scenario (STS). Available online: https://www.easa.europa.eu/en/domains/civil-drones-rpas/specific-category-civil-drones/standard-scenario-sts (accessed on 1 October 2023).
- Turner, D.; Lucieer, A.; McCabe, M.; Parkes, S.; Clarke, I. Pushbroom hyperspectral imaging from an unmanned aircraft system (UAS)–geometric processing workflow and accuracy assessment. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, XLII-2/W6, 379–384. [Google Scholar] [CrossRef]
- Inamdar, D.; Kalacska, M.; Arroyo-Mora, J.P.; Leblanc, G. The Directly-Georeferenced Hyperspectral Point Cloud: Preserving the Integrity of Hyperspectral Imaging Data. Front. Remote Sens. 2021, 2, 675323. [Google Scholar] [CrossRef]
- Mogili, U.M.R.; Deepak, B.B.V.L. Review on Application of Drone Systems in Precision Agriculture. Procedia Comput. Sci. 2018, 133, 502–509. [Google Scholar] [CrossRef]
- Wang, J.; Ma, C.; Chen, P.; Yao, W.; Yan, Y.; Zeng, T.; Chen, S.; Lan, Y. Evaluation of aerial spraying application of multi-rotor unmanned aerial vehicle for Areca catechu protection. Front. Plant Sci. 2023, 14, 1093912. [Google Scholar] [CrossRef]
- del Cerro, J.; Cruz Ulloa, C.; Barrientos, A.; de León Rivas, J. Unmanned Aerial Vehicles in Agriculture: A Survey. Agronomy 2021, 11, 203. [Google Scholar] [CrossRef]
- Goyens, C.; Vis, P.D.; Hunt, S.E. Automated Generation of Hyperspectral Fiducial Reference Measurements of Water and Land Surface Reflectance for the Hypernets Networks. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021; pp. 7920–7923. [Google Scholar]
- Koirala, P.; Løke, T.; Baarstad, I.; Fridman, A.; Hernandez, J. Real-Time Hyperspectral Image Processing for UAV Applications, Using HySpex Mjolnir-1024; SPIE: Bellingham, WA, USA, 2017; Volume 10198. [Google Scholar]
- Barber, H.; Wall, A.; Kumar, S.; McKercher, R. RPAS Operator Guidance and Safety Assurance Tools for the Urban Environment–Phase III; National Research Council of Canada: Ottawa, ON, Canada, 2023. [Google Scholar]
- CEOS Working Group on Calibration and Validation Land Product Validation Subgroup. CEOS Land Validation Sites. Available online: https://lpvs.gsfc.nasa.gov/LPV_Supersites/LPVsites.html (accessed on 1 October 2023).
- Arroyo-Mora, J.P.; Kalacska, M.; Soffer, R.; Ifimov, G.; Leblanc, G.; Schaaf, E.S.; Lucanus, O. Evaluation of phenospectral dynamics with Sentinel-2A using a bottom-up approach in a northern ombrotrophic peatland. Remote Sens. Environ. 2018, 216, 544–560. [Google Scholar] [CrossRef]
- Inamdar, D.; Kalacska, M.; Darko, P.O.; Arroyo-Mora, J.P.; Leblanc, G. Spatial response resampling (SR2): Accounting for the spatial point spread function in hyperspectral image resampling. MethodsX 2023, 10, 101998. [Google Scholar] [CrossRef]
- Soffer, R.J.; Ifimov, G.; Arroyo-Mora, J.P.; Kalacska, M. Validation of Airborne Hyperspectral Imagery from Laboratory Panel Characterization to Image Quality Assessment: Implications for an Arctic Peatland Surrogate Simulation Site. Can. J. Remote Sens. 2019, 45, 476–508. [Google Scholar] [CrossRef]
- Richter, R.; Schlapfer, D.; Atmopsheric/Topographic Correction for Airborne Imagery. ATCOR-4 User Guide, Version 7.0.3. DLR/ReSe, Wessling, DLR-IB 565-02. 2019. Available online: https://www.rese-apps.com/pdf/atcor4_manual.pdf (accessed on 1 September 2023).
- Elmer, K.; Soffer, R.J.; Arroyo-Mora, J.P.; Kalacska, M. ASDToolkit: A Novel MATLAB Processing Toolbox for ASD Field Spectroscopy Data. Data 2020, 5, 96. [Google Scholar] [CrossRef]
- Jagatia, B.; Nallapu, R.T.; Linden, P. Validation for On-Orbit Demonstration of Glint Imagery Tasking. In AIAA SCITECH 2023 Forum; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2023. [Google Scholar] [CrossRef]
- Cawse-Nicholson, K.; Townsend, P.A.; Schimel, D.; Assiri, A.M.; Blake, P.L.; Buongiorno, M.F.; Campbell, P.; Carmon, N.; Casey, K.A.; Correa-Pabón, R.E.; et al. NASA’s surface biology and geology designated observable: A perspective on surface imaging algorithms. Remote Sens. Environ. 2021, 257, 112349. [Google Scholar] [CrossRef]
- Meister, G.; Knuble, J.J.; Chemerys, L.H.; Choi, H.; Collins, N.R.; Eplee, R.E.; Gliese, U.; Gorman, E.T.; Jepsen, K.; Kitchen-McKinley, S.; et al. Test Results From the Prelaunch Characterization Campaign of the Engineering Test Unit of the Ocean Color Instrument of NASA’s Plankton, Aerosol, Cloud and Ocean Ecosystem (PACE) Mission. Front. Remote Sens. 2022, 3, 875863. [Google Scholar] [CrossRef]
- Buschkamp, P.; Sang, B.; Peacocke, P.; Pieraccini, S.; Geiss, M.J.; Roth, C.; Moreau, V.; Borguet, B.; Maresi, L.; Rast, M.; et al. CHIME’s Hyperspectral Imaging Spectrometer Design Result from Phase A/B1; SPIE: Bellingham, WA, USA, 2021; Volume 11852. [Google Scholar]
- Bakken, S.; Henriksen, M.B.; Birkeland, R.; Langer, D.D.; Oudijk, A.E.; Berg, S.; Pursley, Y.; Garrett, J.L.; Gran-Jansen, F.; Honoré-Livermore, E.; et al. HYPSO-1 CubeSat: First Images and In-Orbit Characterization. Remote Sens. 2023, 15, 755. [Google Scholar] [CrossRef]
- Pellegrino, A.; Fabbretto, A.; Bresciani, M.; de Lima, T.M.A.; Braga, F.; Pahlevan, N.; Brando, V.E.; Kratzer, S.; Gianinetto, M.; Giardino, C. Assessing the Accuracy of PRISMA Standard Reflectance Products in Globally Distributed Aquatic Sites. Remote Sens. 2023, 15, 2163. [Google Scholar] [CrossRef]
- Naethe, P.; Asgari, M.; Kneer, C.; Knieps, M.; Jenal, A.; Weber, I.; Moelter, T.; Dzunic, F.; Deffert, P.; Rommel, E.; et al. Calibration and Validation from Ground to Airborne and Satellite Level: Joint Application of Time-Synchronous Field Spectroscopy, Drone, Aircraft and Sentinel-2 Imaging. PFG J. Photogramm. Remote Sens. Geoinf. Sci. 2023, 91, 43–58. [Google Scholar] [CrossRef]
- Pal, P.; Bhattacharyya, S.K. Slosh dynamics of liquid-filled composite containers—A two dimensional meshless local Petrov–Galerkin approach. J. Fluids Struct. 2013, 39, 60–75. [Google Scholar] [CrossRef]
- Gautam, D.; Lucieer, A.; Watson, C.; McCoull, C. Lever-arm and boresight correction, and field of view determination of a spectroradiometer mounted on an unmanned aircraft system. ISPRS J. Photogramm. Remote Sens. 2019, 155, 25–36. [Google Scholar] [CrossRef]
- Sankararao, A.U.G.; Kumar, N.T.S.; Rajalakshmi, P. Workflow and Calibration of Airborne Hyperspectral Imaging System. In Proceedings of the 2020 IEEE International Conference on Computing, Power and Communication Technologies (GUCON), Greater Noida, India, 2–4 October 2020; pp. 757–762. [Google Scholar]
- Skauli, T.; Haavardsholm, T.; Kåsen, I.; Arisholm, G.; Kavara, A.; Opsahl, T.O.; Skaugen, A. An Airborne Real-Time Hyperspectral Target Detection System; SPIE: Bellingham, WA, USA, 2010; Volume 7695. [Google Scholar]
- Balaji, P.S.; Rahman, M.E.; Moussa, L.; Lau, H.H. Wire rope isolators for vibration isolation of equipment and structures–A review. IOP Conf. Ser. Mater. Sci. Eng. 2015, 78, 012001. [Google Scholar] [CrossRef]
- Arroyo-Mora, J.P.; Kalacska, M.; Soffer, R.J.; Lucanus, O. Comparison of Calibration Panels from Field Spectroscopy and UAV Hyperspectral Imagery Acquired Under Diffuse Illumination. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021; pp. 60–63. [Google Scholar]
- Salko, S.-S.; Juola, J.; Burdun, I.; Vasander, H.; Rautiainen, M. Intra- and interspecific variation in spectral properties of dominant Sphagnum moss species in boreal peatlands. Ecol. Evol. 2023, 13, e10197. [Google Scholar] [CrossRef] [PubMed]
- Government of Canada. Regulations Amending the Canadian Aviation Regulations (RPAS–Beyond Visual Line-of-Sight and Other Operations). Available online: https://gazette.gc.ca/rp-pr/p1/2023/2023-06-24/html/reg6-eng.html (accessed on 1 October 2023).













| Location | Regulatory Framework for Conventional RPAS Operations | Conventional RPAS Operation Weight Limit | Regulatory Framework for Overweight RPAS Operations | Requirements for Overweight RPAS Operations |
|---|---|---|---|---|
| Canada | Part IX (Remotely Piloted Aircraft Systems) of the Canadian Aviation Regulations (CARs) [17] | MTOW of 25 kg | Special Flight Operations Certificate (SFOC) (AC 903-002) [18] | Specific Operational Risk Assessment (SORA) (AC 903-001) [18]
|
| United States | Title 14 of the Code of Federal Regulations Part 107 (14 CFR 107) ** [19] | MTOW less than 55 lb | 14 CFR Part 11 and Title 49 United States Code (U.S.C.) § 44,807 *** [20] | Special Airworthiness Certificate or Petition for Exemption on the public docket and Certificate of Waiver Authorization |
| European Union | A1, A2 and A3 subcategories of the Open Category [21] | MTOM of 25 kg | Specific category or certified category |
|
| SWT (m/s) | Tunnel Wind Speed (m/s) |
|---|---|
| 8 | 5.0, 6.0, 7.0, 8.0, 9.0, 9.5, 10.0, 10.5, 11.0, 11.5, 12.0, 12.5, 13.0, 13.5, 14.0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Arroyo-Mora, J.P.; Kalacska, M.; Lucanus, O.; Laliberté, R.; Chen, Y.; Gorman, J.; Marion, A.; Coulas, L.; Barber, H.; Borshchova, I.; et al. Development of a Novel Implementation of a Remotely Piloted Aircraft System over 25 kg for Hyperspectral Payloads. Drones 2023, 7, 652. https://doi.org/10.3390/drones7110652
Arroyo-Mora JP, Kalacska M, Lucanus O, Laliberté R, Chen Y, Gorman J, Marion A, Coulas L, Barber H, Borshchova I, et al. Development of a Novel Implementation of a Remotely Piloted Aircraft System over 25 kg for Hyperspectral Payloads. Drones. 2023; 7(11):652. https://doi.org/10.3390/drones7110652
Chicago/Turabian StyleArroyo-Mora, Juan Pablo, Margaret Kalacska, Oliver Lucanus, René Laliberté, Yong Chen, Janine Gorman, Alexandra Marion, Landen Coulas, Hali Barber, Iryna Borshchova, and et al. 2023. "Development of a Novel Implementation of a Remotely Piloted Aircraft System over 25 kg for Hyperspectral Payloads" Drones 7, no. 11: 652. https://doi.org/10.3390/drones7110652