
A Novel Semidefinite Programming-based UAV 3D Localization Algorithm with Gray Wolf Optimization


1
School of Computer and Information Engineering, Henan University, Kaifeng 475004, China
2
Henan Province Engineering Research Center of Spatial Information Processing, Henan University, Kaifeng 475004, China
*
Author to whom correspondence should be addressed.
Drones 2023, 7(2), 113; https://doi.org/10.3390/drones7020113
Submission received: 9 January 2023
/
Revised: 29 January 2023
/
Accepted: 6 February 2023
/
Published: 7 February 2023
(This article belongs to the Special Issue Intelligent Coordination of UAV Swarm Systems)
Abstract
:The unmanned aerial vehicle (UAV) network has gained vigorous evolution in recent decades by virtue of its advanced nature, and UAV-based localization techniques have been extensively applied in a variety of fields. In most applications, the data captured by a UAV are only useful when associated with its geographic position. Efficient and low-cost positioning is of great significance for the development of UAV-aided technology. In this paper, we investigate an effective three-dimensional (3D) localization approach for multiple UAVs and propose a flipping ambiguity avoidance optimization algorithm. Specifically, beacon UAVs take charge of gaining global coordinates and collecting distance measurements from GPS-denied UAVs. We adopt a semidefinite programming (SDP)-based approach to estimate the global position of the target UAVs. Furthermore, when high noise interference causes missing distance pairs and measurement errors, an improved gray wolf optimization (I-GWO) algorithm is utilized to improve the positioning accuracy. Simulation results show that the proposed approach is superior to a number of alternative approaches.
1. Introduction
The flying ad hoc network (FANET) is evolving at a tremendous rate and emerging technologies, and applications based on UAVs oriented toward 6G have received considerable attention [1,2]. UAV networks as a kind of FANET have promising applications in both military and civilian areas (e.g., urban fire emergency rescue, forest wildfire monitoring, enemy aircraft reconnaissance and air shows, etc.). UAV networks have many advantages over traditional cellular networks (CN) and mobile ad hoc networks (MANETs). With higher altitudes and wider coverage capabilities, the signal of line of sight (LoS) from UAVs is effectively utilized by ground terminals and users. As a result, UAVs are regarded as airborne base stations to service mobile users and ground stations by using air-to-ground (A2G) channels [3,4]. In addition, UAVs with characteristics such as small size and high mobility can be flexibly deployed. Therefore, rapid on-demand services can be provided in hazardous and harsh environments. However, due to high mobility and dynamics, UAVs suffer from end-to-end transmission delays because of frequent topology changes and disconnections of communication links in UAV networks. As a result, it is critical to know the precise, low-latency position information of each UAV [5].
Localization is an invaluable area for researchers in surveillance, path planning, wireless communication, and UAV networks [6,7]. In FANETs, most procedures (topology control, position-aware routing, etc.) require knowledge of the precise physical location of each UAV, because many actions and observations are implemented based on position. The technology of UAVs becomes meaningless if the two cannot be correlated. UAV localization is therefore a critical technology that requires in-depth exploration. Among the existing localization methods, the global positioning system (GPS) is widely used. However, there are limitations (e.g., it requires higher costs and/or is not achievable to be deployed in all scenarios). Moreover, since GPS requires light of sight (LoS) from a satellite, it cannot provide a reliable localization scheme when the LoS is obstructed by obstacles. Therefore, many UAV localization schemes that are non-GPS based have been proposed [8,9,10].
Distance-based UAV localization schemes are the focus of much current research, which defines network localization as the problem of determining the physical coordinates of unknown nodes given the anchors of coordinates and distance pairs between unknown nodes and anchors. Target node localization using anchor information and pairwise distance measurements among nodes is usually formulated as an optimization problem with quadratic-constrained quadratic programming (QCQP). Usually, the problem is NP-hard and nonconvex. Semidefinite programming (SDP) relaxation (a novel idea proposed by researchers) has been applied to solve this issue. The basic principle is to first change the nonconvexity of the problem, and the SDP relaxation causes the constraints of the original problem to be relaxed to a semipositive definite form, which transforms the initial problem into a convex optimization problem. The SDP-based problem is then solved by common convex optimization techniques. However, in the actual scene, the measurement value will be polluted by noise, which makes the measurement result inaccurate, and reduces the positioning precision. For decades, computational intelligence (CI)-based methods have been employed to improve the localization efficiency and accuracy. In [11], the numerical solution is carried out by using a rank-relaxed approach based on SDP, and the results are upgraded using the orthogonal Procrustes technique. The experimental results suggest that the method is feasible when DOA measurements are noisy. Arafat et al. proposed a bounding box model and applied it in swarm intelligent localization and hybrid gray wolf optimization (HGWO) localization algorithms to narrow the particle search space and estimate the location of UAVs, respectively [12,13].
The goal of this paper is to design an efficient localization optimization approach based on inter-UAV distance measurement in a 3D dynamic scene. SDP is the typical method for solving distance-based localization in general wireless communication networks. SDP and graph theory-based localization method for sensor networks was proposed as early as in [14], and its core philosophy is to derive error bounds by adding regularization terms to the SDP. Instead, our proposal is to transform the localization problem into a maximum likelihood estimation (MLE) problem with decreasing distance errors and to solve it by relaxing the bound through a composite algorithm called SDP + RLT. Furthermore, in order to improve localization accuracy at high noise levels, the I-GWO algorithm is inspired to refine the SDP + RLT results. Simulation results verify that our scheme outperforms existing localization schemes. Our contributions and innovations in this paper are summarized as follows:
- A system model for the design and analysis of 3D UAV localization is developed. We consider distance measurement-based UAV position estimation as an objective optimization problem with quadratic constraints and formulate it as a maximum likelihood estimation (MLE) problem. A localization model for the design of UAVs in a 3D moving scene is developed. We consider the distance-based UAV position estimation as an objective optimization problem with quadratic constraints and formulate it as an MLE problem.
- The SDP and RLT relaxation constraints are established based on the distance constraints of the localization problem, and the solvability and tightness of the proposed composite algorithm SDP + RLT are analyzed.
- In addition, our solution is extended to the case of noisy distance measurement errors and loss, and an I-GWO algorithm is proposed, which greatly improves localization accuracy. Finally, we validate the excellence of the proposed scheme by comparing multiple sets of experimental results.
The remaining sections are as follows. Related work on UAV localization is introduced in the next section. Section 3 introduces the network setting and problem formulation. Section 4 proposes a localization scheme based on the combination of SDP and RLT relaxation. Section 5 presents a bionic optimization algorithm I-GWO. Numerical simulations are given in Section 6. Section 7 concludes this paper.
2. Related Works
The problem of determining the position of a UAV is called localization. According to the technical means, the data collected by UAVs to achieve localization vary. We will classify and describe UAV localization methods from the following aspects.
First, it can be divided into relative localization (RL) and absolute localization (AL) according to the type of measurement. AL is usually implemented based on GPS technology, but its performance is vulnerable to environmental factors. The technique of acquiring the topological shape of a network through relative distance or angle measurements between nodes is called RL. Guo et al. [15] estimated the relative positions of UAVs based on graph theory and UWB RCM in a GPS-rejected environment, thus enabling distributed formation control. Autopilot and guidance laws designed for fixed-wing UAVs without a priori knowledge were studied in [16,17]. Secondly, there are centralized and distributed algorithms based on the computational framework. The centralized approach is suitable for static networks, as it requires the collection of all measurements and the calculation of estimates at the fusion center, which requires powerful computational and communication capabilities. Location estimation that iteratively extends to the overall framework based on local information is called distributed localization, which has the advantage of load balancing and efficiency of the network. Two different distributed algorithms are described in [18,19]. Thirdly, we categorize them according to the use of anchors or not. Zhang et al. propose a unique anchorless localization algorithm that uses a combined distance and angle technique to establish a local coordinate system (LCS) and then estimates the relative position from a fixed coordinate system [20]. This method effectively avoids reflection blur. However, the high cost of angle measurements has resulted in few practical applications. A new idea of using a mobile single anchor to locate target nodes was proposed in [21] that employed the computational intelligence-based H-best particle swarm (HPSO) algorithm. Liu et al. [22] proposed a distributed UAV relative positioning framework and used the SDP method to obtain the global topology of the UAV cluster. The lower bounds of CRLB with and without anchors were then analyzed separately. In addition, the localization is classified according to the type of calculation (distance or hop count). An MDV-hop algorithm based on the DV-hop algorithm is proposed in [23] for locating wireless sensor nodes. Techniques based on distance information typically include SDP, least squares (LS), gradient descent (GD), and multidimensional scaling (MDS) [24,25,26]. Among these, SDP methods have the advantage of significantly better localization accuracy than other closed-form solutions. However, it is less resistant to interference in large-scale networks. Zou et al. [27] proposed a method that uses the initial estimation of the SDP to iterate the position and velocity of target nodes to improve the localization accuracy. A distributed gradient algorithm based on Barzilai–Borwein steps was applied to distributed distance measurements, which enabled node localization accuracy to meet expectations [28]. Figure 1 shows the UAV localization algorithms under different classifications. The problem of determining the location of a UAV node is called localization. Usually, distance-based UAV localization requires the estimation of absolute position (relative to a local or global frame of reference) from partial relative measurements between UAVs. That is, each UAV can measure relative positions from a set of neighboring UAVs, and then infer the absolute position of all UAVs from this information. UAV localization algorithms can be classified from different perspectives.
We denote (·)T and (·)−1 as the transpose and inverse of a vector (or matrix). The rank of A is denoted as Rank(A). ai stands for the ith element of a. ||·|| is the Euclidean norm. 1k and 0k are the all-one and all-zero vectors of length k. Ik is the k × k identity matrix. signify that is positive semidefinite.
3. Problem Formulation
Consider a scenario of dynamic swarms of UAVs. The 3D network space consists of m beacon UAVs (denoted as anchors and coordinates are known) and n target UAVs (positions are unknown). Let denote the set of anchors, and let denote the set of target UAVs, where NR = Na + Nu. There exists a clock offset between the and the standard time. The UAVs have certain communication capabilities that allow them to range with neighbor UAVs. The coordinate of the anchor UAVs and target UAVs is defined as and , respectively.
It is assumed that the distance between UAVs is obtained by the signal time of arrival (TOA). If the distance of UAV i and j is within communication range R, their distance can be expressed by
Furthermore, we regard the distance as symmetric, i.e., dij = dji. We denote T as the time duration of the signal rij(t) from jth UAV to the ith UAV, given by
where αij denotes amplitude, sj(t) is the known waveform, τij is the transmit delay, and nij(t) represents Gaussian noise.
Among the actual problems of UAV network localization, due to the limitation of communication distance, not all the measurement pairs of distance are known. Therefore, the pair distances of UAV/UAV pairs and UAV/anchor pairs are denoted as and , respectively. Define as the true distance between target UAVs and as the true distance between the target UAV and anchor UAV. The measurement noise is modeled to obey Gaussian distribution, and thus the corresponding distance measurement of UAV is
where and are the measurements between UAV i and UAV j with Gaussian noise , , and N represents normal random variables with mean 0 and variance σ2, as well as those that are independent.
The final goal is to estimate the position of a large-scale UAV network in a dynamic scene using distance measurements. Figure 2 depicts the network model of the UAV network localization problem in a dynamic scenario. The nomenclature of used terms is provided in Table 1.
In the above figure, the distances between UAVs are represented by the corresponding edges; thus, the UAV network localization problem is
In general, the above problem is considered as a nonconvex problem (NP-hard), which is tough to solve. Global optimization techniques have been widely used, such as MDS, SDP, and nonlinear least squares (NLS). Projection and dimensionality reduction are the main ideas of the MDS technique. NLS is usually resolved by direct derivatives, gradient descent, and quasi-Newton methods. Semidefinite relaxation (SDR) is a computationally efficient approximation to quadratically constrained quadratic programming (QCQP), and the UAV localization problem proposed in this article is classified as QCQP. The QCQP is approximated by semidefinite programming (SDP), in which reliable and efficient algorithms have been studied by previous scholars.
In this paper, a novel idea for solving distance-based UAV localization has been designed. We first transform the UAVs position estimation problem into an MLE problem that reduces the error between the true and the estimated value of the position, and then create relaxation constraints and derive an answer for the MLE problem via the composite localization algorithm SDP + RLT.
4. Proposed Localization Solution
4.1. System Model
Based on the above problem formulation, a UAV network consists of Nu target UAVs and Na anchor UAVs. The distance measurement of UAVs is obtained by communicating with their neighbor UAVs. We combine the 3D coordinates of all target UAVs into a matrix , which needs to be settled. Due to the influence of UAV mobility and noise during distance measurement, there exists an error between the measurements and the accurate distance of UAVs. In order to account for noisy distance information, the idea of maximum likelihood estimation (MLE) is utilized to set up optimization problems that minimize the expected error in the UAV position estimation [29]. Therefore, an MLE problem of UAV positioning can be expressed as
where wij > 0 are weights. The weights in Equation (5) are important to achieve precise positioning. We tend to give higher weights to distance measures with high confidence, which facilitates higher-quality estimator error reduction.
The position error is defined as
We further model the UAV localization problem as
Here, is the vector with 1 at the ith position, −1 at the jth position, and zero everywhere else; is the vector of all zeros except an −1 at the jth position; I3 is the 3 × 3 identity matrix.
In the SDP approach, the constraint relaxation is , which means , the constraint is equivalent to the following linear matrix inequality:
Then formulate the relaxation problem as a standard SDP problem, that is, to find the symmetric matrix such that:
where Z1:3 is the upper three-dimensional master submatrix of Z. After the SDP normalization of the localization problem, the problem solvability will be analyzed. Then, whether UAVs can be uniquely localized is considered, and the proof is given in the next section.
4.1.1. SDP Solvability Analysis
We now analyze the solvability of Problem (9) through SDP pairwise relaxation theory. The rank of any possible feasible solution matrix of (9) is highlighted in [30] as being at least 3. Assume that (9) has a feasible solution. This happens when dkj and dij denote the accurate values of the position . Then, is a feasible solution to (9). Since the original is feasible, the dual must have a minimum value of 0. The dual of the SDP relaxation is represented below
Let U be a (3 + n)-dimensional dual relaxation matrix, that is
According to the dual theory of SDP, the matrices Z and U satisfy and . The following theory can be derived.
Theory 1.
If the optimal dual relaxation matrix has rank n, then each solution of (4) has Rank 3. That is, Problems (4) and (9) are equivalent, and (4) can be solved in polynomial time as an SDP.
For the UAV localization problem, the SDP relaxation in (9) can find an accurate solution to Problem (7). Note that localization is unique only in some cases where the network map is generally rigid, while nodes are locatable when the graph is globally rigid. The solvability of the UAV localization problem will be investigated by graph theory below.
The issue of the network location problem based on relative ranging measurement pairs of distance is actually a general distance geometry and graphical implementation problem. Suppose a set of wireless nodes are placed in a Euclidean space ℝd and they communicate with each other to form a certain topology. This topology can be abstracted as an undirected connectivity graph N, which contains vertices set = {1,2,…,n} and a set of edges ε. The vertices and edges represent the nodes and communication links (distance measurements) in the communication network, respectively. Thus, the goal of network localization derives the location information of all unknown nodes based on known anchor information xj, topological connectivity information of the graph N, and distance information dij. The proof process is omitted here. See [30] for details, and the following theorem is valid.
Theorem 1.
The network localization problem is just considered solvable if there exists a set of positions {xm+1, …, xn} in ℝd corresponds to the given data (N, {x1, x2, …, xm} and dij).
Theorem 1 provides sufficient conditions for the UAV network 3D localization problem of particular relevance in the case of global rigidity. Having solved the solvability, whether localization is uniquely solvable is discussed below.
4.1.2. Unique Solvability Analysis
The optimal value in Problem (9) is 0 if the distance measurements of UAVs are exact. However, the sufficient number of distance information is also a significant feature of the challenge to achieve unknown node localization. Biswas et al. [29] have discussed this problem in detail and provided a unique solvability condition. We repeat it here in terms of localization in 3D space. Here, the matrix Z has 3n + n(n + 1)/2 unknown variables. Hence, there are at least 3n + n(n + 1)/2 linear equations in the constraint. In addition, in case these equations are linearly independent, then there is a unique solution to Z. Therefore, we have the following proposal: If there are 3n + n(n + 1)/2 distance pairs in 3D localization, each distance pair has an exact distance metric. Then, Problem (7) has a unique feasible solution:
Now, it could be said that it equals the true position vectors of the target UAVs. That is, the SDP relaxation solves the original problem exactly.
Theorem 2.
If Problem (7) has a unique feasible solution in
and no xj (j = 1,2,⋯,n) in , then (5) is uniquely locatable, where h > 3 (excluding the case of attaching all zeros to ), such that
The latter condition in Theorem 2 states that the problem cannot be confined to a higher-dimensional space. In this space, the anchors are increased to . The results in [29] mean that the relaxation problem (4) solves (2) exactly when the problem could be uniquely localized.
Based on the above SDP uniqueness analysis, we learn that it is extremely crucial that the localization problem can be solved uniquely, especially for A2G communication. For unique localization in 2D and 3D space, at least three points and four points are required, respectively, and they are not collinear or on the same plane.
Figure 3 shows a typical network model for 3D localization. In these models, at least four anchor nodes are required that need to locate the unknown node, and all four anchor nodes cannot be on the same line or the same UAV on the same line. Figure 3a illustrates the case where four nodes can locate an unknown node E with anchors (A, B, C, D). The second case shown in Figure 3b shows that two potential positions (E, F) can be calculated for nodes (A, B, C, D) in the same plane. In Figure 3c, four anchors are on the same line and the exact position cannot be found because all anchor positions are on the same line, and (α1, α2, …, αn) may be the correct position.
4.2. SDP Plus RLT Relaxation Scheme
RLT is an effective approach for continuous and discrete nonconvex or QCQP issues [31]. As a linear programming method, the researched problem exhibits a nonconvexity when there are second-order terms in the objective function and constraints. RLT can transform the problem into a solvable convex-optimal form by introducing new variables containing constraints to replace the constraints of the original problem in the reformulation phase. Anstreicher et al. [31] demonstrated that for typical values of the original variables, the semidefiniteness constraint removes a large part of this feasible region. It has been shown in [32] that using RLT plus SDP constraints can achieve better results than one of the two. In this article, we introduce RTL into SDP to solve the distance-based UAV localization problem.
First, determine the boundaries of each coordinate in the position matrix X of the UAV target nodes The upper bounds are denoted as , and the lower bounds are denoted as . Next, the boundary constraints are determined. With two variables , four constraints are established . Multiplying the new constraints containing and , at the same time using Yij instead , we obtain
It is clear that Yij = Yji, hence the last two constraints are equivalent.
Next, after adding the SDP constraint and RLT, (9) can be reformulated as
The Tightness Analysis
Tightness analysis is performed to assess the impact of our proposed solution when it comes to UAV localization performance. We concentrate on the variety of the feasible regions of Yij when attaching SDP to it.
The RLT relaxation does not change the affine transformation of the initial constraint factors. We suppose that l = 0 and u = e without loss of generality. We consider variables , and assuming and . Then, the RLT constraints on Y11, Y22, and Y12 become
Next, we exert the SDP constraint on the RLT. The SDP can be written as follows
For the specified values of x1 and x2, comparing the feasible region of Y11Y22 before and after adding (15), the equivalent constraint can be derived as follows.
It is straightforward that applying the SDP to RLT improves the lower bounds on Y11 and Y22, but has no effect on the upper bounds. Thus, combining the RLT constraint on the SDP tightens the feasible region of Problem (13). Similarly, the feasible domain of (16) is tighter than the feasible domain of (9). Therefore, it can be demonstrated that our approach can speed up the localization convergence rate. Algorithm 1 shows the SDP + RLT method for UAV localization.
| Algorithm 1 SDP + RLT Method for UAV Localization |
| Input: ak, m, n, , , k,j, di,j, R, l, u, ϵ. Output: positions of unknown UAV nodes x1, x2, …, xn. 1: begin /*Initialization*/ 2: Initialize the Euclidean distance matrix Z = [I3, X; XT,Y], where Y = XTX. 3: Z = Symmetrize (Z) 4: cvx begin 5: minimize norm(X, 2) 6: s.t. 7: for each UAV i ← 1 to n do 8: update Z by solving Problem (14). 9: end for 10: if Z ≤ 0 then 11: break; 12: end if 13: cvx end 14: end |
5. Bionic Optimization Algorithm
In this section, we develop an improved strategy called I-GWO based on the classical gray wolf optimization (GWO) to optimize the UAV localization results in the presence of noise interference, such that the localization results have smaller errors and higher accuracy.
5.1. Motivation
As seen above, the exact resolution of the localization problem can be gained using SDP + RLT when the distance information between UAVs is accurate. However, the localization problem suffers from measurement noise, and there is no scheme to satisfy the constraints in (7). Bioinspired optimization algorithms have attracted the attention of researchers who have attempted to solve UAV localization problems by employing them because of their high precision and low complexity. Previous studies have proposed several bionic-based localization algorithms. Arafat et al. [12] proposed an improved PSO algorithm, which uses a grouping approach to achieve fast convergence. Raguraman et al. [33] proposed a dimension-based hybrid algorithm (HDPSO) to reduce localization errors.
Motivated by the bionic optimization algorithm, a bionic optimization algorithm I-GWO is proposed in this paper for improving localization accuracy. Since the localization results of UAVs are subject to errors when applying the SDP + RLT technique to distance measurements containing noise, we consider the localization results of SDP + RLT as input and then apply the I-GWO algorithm to improve the localization accuracy.
The localization of target UAVs can be regarded as an error optimization issue. Let be the optimized position estimate of the unknown UAVs. The distance between anchor and is . Consequently, the objective function of the localization optimization is denoted as
where K is the number of anchors whose location is close to the target node (usually smaller than R). is the noise-measured distance between the target drone and anchor, and is the distance between them after calculation of optimization, defined as
5.2. I-GWO Algorithm
The GWO algorithm is inspired by the unique hierarchy and hunting patterns of wolves in nature. In the algorithm, the gray wolf population is divided into four classes, including alpha, beta, delta, and omega (hereinafter will be omitted as α, β, δ, and ω) in order from high to low. The position of each wolf is regarded as a potential solution for the prey position (target node). The α wolf leads the wolves to proceed with the search, encirclement, and hunting activities for the prey. In order to imitate the social hierarchy in the design of I-GWO, the location of α wolf is taken as the best solution (optimal fitness of individuals), β as the sub-optimal solution, δ as the third optimal solution, and the remaining candidate solution is named ω. Within the prey searching phase, the movement of lower-ranked gray wolves in the population is based on the top three ranks, and the wolves’ ranks are constantly updated. When the algorithm reaches the maximum iterations, the leader of the wolf population (α wolf) is considered to have caught the prey, at which case the hunt is finished. Studies show that the I-GWO algorithm can dramatically reduce the probability of being premature and falling into a local optimum.
Define as the population of gray wolves and w denotes the number of wolves in the population. The ith wolf is denoted as in the 3D situation. In the encircling prey phase, the gray wolf position update is defined as
where t denotes the iteration, Up denotes the location of the prey, and D expresses the distance vector between the individual wolf and prey. A and C are constantly varying coefficients.
where r1 and r2 are random numbers of [0,1], and a is the convergence factor (decreases from with the t).
It can be seen from the equation that the gray wolf group moves toward α wolf (who is nearest to the prey as the leader). The wolf group’s movement is motivated by its position Ui and the random vector C. The step length is determined by D and A. When , it is far from the target and shows stronger global seeking ability; On the contrary, if , it approaches the prey and shows stronger local search ability.
During the hunting stage, gray wolves are assumed to identify the prey’s position (which is set to the α wolf position at the first algorithm loop) and encircle it. However, actually, the desired position of prey is unknown during the whole optimization phase. Usually, it is assumed that the top three rank wolves (e.g., α, β, and δ) have a better knowledge of the prey’s potential location. Therefore, we saved these three solutions so far and asked other gray wolves (including ω) to update their positions with the iteration based on the first three best-searched positions. Here, the following equation is proposed.
The step length and direction of wth individuals wolf in the group toward α, β, and δ wolves are defined by (24), and the final position of ω and other wolves is defined by (25). In order to achieve higher localization accuracy of prey (e.g., target UAV), the proposed algorithm I-GWO has the following improvements.
(i) On the one hand, the particle initialization is refined. Since we have already conducted a preliminary estimation of the UAV target node position by the SDP method in the preliminary phase of localization, the α wolf position is assigned by the result of SDP + RLT. We generate a regular polyhedron with the position of the α wolf as the center and the Rw as the radius. Then, its individual vertices are assumed to be the initial positions of β wolf, δ wolf, ω wolf, and other wolves.
(ii) On the other hand, to further enhance the exploration capability of the I-GWO algorithm, the wolves’ positions are updated according to the mean value of the random weight sum of α, β, and δ wolves, and the position updating is modified as
where qi is the dynamic weight coefficient generated by random numbers of [0,1], and q1 + q2 + q3 = 1. The update rule of I-GWO is described in Figure 4, and the optimization procedure of I-GWO is exhibited in Algorithm 2.
| Algorithm 2 I-GWO of UAV Localization Optimization |
| Input: Preliminary results Xi of SDP + RLT, population size U, max iterations tmax, dimension d, and coefficients r1, r2, q1, q2, and q3. Output: Optimal position of the unknown UAVs. /*Initialization*/ 1: Initialize the gray wolf pack using Xi. 2: Initialize the GWO parameters (a, A, C). 3: Initialize the fitness value (Uα, Uβ, Uδ). /*Computation*/ 4: while (t ≤ tmax) do 5: for each wolf w = 1: W do 6: Update the current search agent position using (18) 7: end for /*I-GWO loop*/ 8: for each wolf w = 1: W do 9: Evaluate the fitness value and update (Uα, Uβ, Uδ) 10: Obtain the variable a based on (23). 11: end for 12: for each wolf w = 1: W do 13: Calculate A and C based on (19) 14: Update the position of wolf w by (24)(25) 15: end for 16: w = w + 1 17: t = t + 1 18: end while 19: Terminate the process and output the optimal position by Uα 20: end |
6. Simulation
The performance of the proposed algorithms will be evaluated through MATLAB simulator simulations when solving UAVs that cannot be localized or uniquely localized because of limited measurements. First, the hybrid algorithm (named SDP + RLT) is compared with the SDP + O algorithm by Russell et al. [11], the MDS method [18], and the least squares (LS) algorithm [24]. Second, the performance of the I-GWO algorithm is evaluated under noisy measurements and compared with PSO algorithms [12], HPSO algorithms [21], and HGWO algorithms proposed by Arafat et al. [13].
6.1. Performance of Proposed Method
Let 50 target UAVs be randomly placed within the simulated area [−300m, 300m] × [−300m, 300m]. The altitudes of the UAVs are in the range [100m, 600m], and 6 anchor UAVs are evenly placed. The UAV motions follow the Gaussian random walk model. In addition, we set R = 300m, then the distance measurements can be made with the UAVs within its communication range. For the noisy range measurement, the Gauss error with fixed standard deviation is used. To be closer to the real scenario, it is also assumed that the distance pairs between UAVs will be lost randomly by 1%. The localization error (LE) is defined as the deviation of the estimated position of a UAV node from the actual position.
where the 3D coordinates of the estimation and actual value of the target nodes are denoted as and , respectively. We evaluate the UAV localization performance using the root mean square error (RMSE) as the evaluation metric, which is averaged over 100 runs.
where denotes the real position matrix of the target UAV node, and denotes the matrix of estimated positions. NMSE is given by the ratio of the matrix to the F-norm of X. In addition, we evaluate the localization accuracy by referring to the mean absolute error (MAE) of the nodes, which is also taken as the average of 100 runs.
where , denote the estimated and true positions of UAV, respectively.
6.2. Simulation Results and Discussion
Figure 5 depicts the accuracy of different localization algorithms for the target node under the measurement noise ratio (noise ratio is 10%) and loss ratio (loss ratio is 1%). Figure 5a shows the LS-based localization effect, where the blue line represents the deviation between the true and estimated positions. Since LS localization is carried out iteratively, the localization deviation of previous nodes will affect the localization of subsequent nodes, so the overall RMSE of localization is large. Figure 5b,c shows MDS localization and SPD + O algorithm, in which 70% of nodes can estimate their positions well, while the rest of the nodes have big deviations, and their MAEs are 4.236 m and 4.013 m, respectively. Figure 5d shows that the proposed localization method SDP + RLT has an MAE of 2.082, which is only half of the SDP + O algorithm. In conclusion, the performance of the SDP + RLT algorithm can be demonstrated by other existing localization algorithms.
We further demonstrate the localization performance. Figure 6 and Table 2 describe the RMSE of different algorithms when the number of target UAVs is increased with noise ratio = 10%, distance loss ratio = 1%, and anchors = 6. Figure 6 clearly demonstrates that the localization performance of our proposed algorithm incrementally improves by increasing the number of UAVs, which is attributed to the fact that more neighbors are available. In addition, the SDP + RLT algorithm outperforms the MDS by about 1.5 orders of magnitude in terms of RMSE and by about 2 orders of magnitude over the LS and SDP + O algorithms. However, the SDP + RLT algorithm costs more time since it uses the “CVX toolbox” to semidefinite constraints on the distance matrix during the run. Table 2 provides accurate numerical statistics. In future research, we consider applying a distributed method to reduce the localization time.
Figure 7 shows that the localization accuracy of the LS, MDS, and SDP + O algorithms improves substantially when anchors increase while the target UAVs are fixed at 50. The RMSE improvement is about 200%, which indicates that they are highly dependent on the anchors and therefore not suitable for large-scale network applications. With increasing anchors, the RMSE of the SDP + RLT algorithm improves by about 50%, so we infer that our algorithm is more scalable and robust in the face of network expansion. In addition, the relatively small number of anchors used implies a lower GPS cost.
Next, the noise factor during distance measurement was evaluated by considering the effects of realistic factors (geography, weather conditions, or UAV’s own maneuverability, etc.). Figure 8 shows that the RMSE of all the algorithms increases when the noise rate increases. However, the SDP + RLT algorithm outperforms the others algorithms in terms of interference immunity. It is notable that the RMSE is equal to 0 when the noise rate is 0. This also justifies the conclusion in Theorem 2 that the SDP method can achieve unique accurate localization.
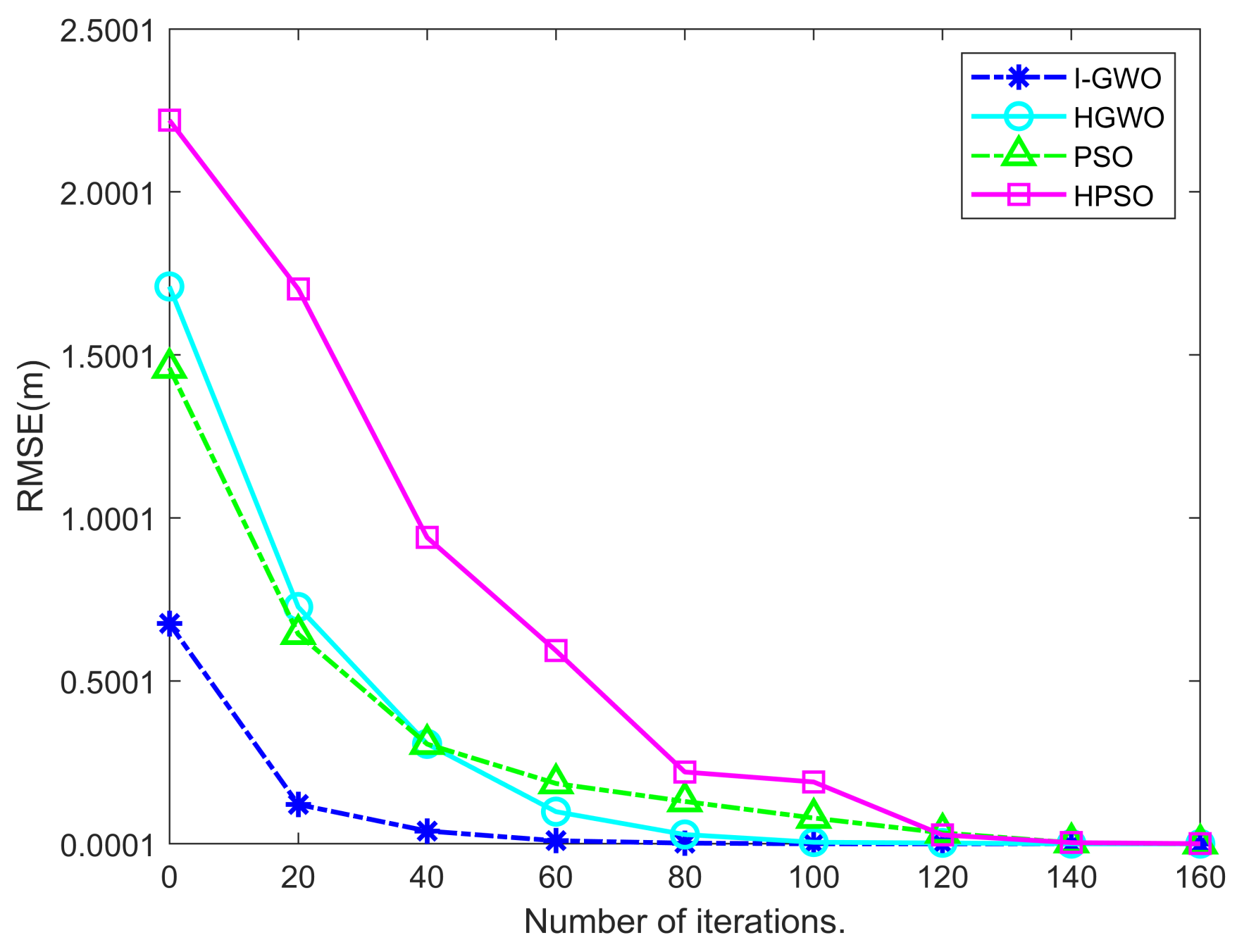
Finally, the improvement of positioning accuracy of different optimization algorithms is demonstrated through comparative experiments. Figure 9 shows the comparison of different affine optimization algorithms applied for the initial localization results of SDP + RLT. Table 3 details the numerical results of the different optimization algorithms. It means that the convergence speed of the I-GWO algorithm is faster than that of PSO, HPSO, and HGWO, and the RMSE is smaller. Therefore, based on the localization results of the SDP + RLT method, the I-GWO algorithm can achieve the goal of high-precision localization of UAVs.
7. Conclusions
In this article, SDP + RLT and I-GWO algorithms have been proposed for solving the localization problem in 3D cyberspace for swarms of UAVs using only distance measurements and a few GPS-equipped UAVs, which are essential for cooperative UAV swarm flying. Then, the solvability and unique solvability have been analyzed theoretically. Further, the I-GWO is proposed to improve the localization accuracy for distance measurements that contain noise. Through simulation results exhibited in MATLAB, we compare the performance of SDP + RLT with other advanced localization methods (i.e., LS, MDS, and SDP + O) and demonstrate its efficiency in terms of RMSE, measurement error, and scalability. I-GWO is compared with the classical optimization algorithms PSO, HPSO, and HGWO. The RMSE and MAE results prove the superiority of the algorithms. Our study still has limitations in terms of computational speed since the proposed approach is based on SDP, where semidefinite constraints consume more time when the target UAVs increase. Hence the proposed method is more suitable for centralized UAV routing schemes. Future work includes the introduction of distributed methods for efficient and high-precision localization of UAV swarms in mobile scenarios to reduce the localization delay. In addition, finding the optimal trajectory of a single mobile anchor UAV to achieve localization is also a future research trend.
Author Contributions
Methodology, Z.L.; Software, X.X.; Validation, Z.L.; Formal analysis, X.X. and Y.Y.; Investigation, Z.L. and Y.Y.; Resources, X.X.; Writing—original draft, Z.L.; Supervision, Y.Y. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by science and technology research project of the Henan province grant number 222102240014.
Institutional Review Board Statement
Not applicable.
Data Availability Statement
The data used to support the findings of this study are included in the article.
Conflicts of Interest
The authors declare that there are no conflict of interest regarding the publication of this paper.
References
- Ashish, S.; Prakash, J. Future FANET with application and enabling techniques: Anatomization and sustainability issues. Comput. Sci. Rev. 2021, 39, 100359. [Google Scholar]
- Tang, F.; Kawamoto, Y.; Kato, N.; Liu, J. Future intelligent and secure vehicular network toward 6G: Machine-learning approaches. Proc. IEEE 2020, 108, 292–307. [Google Scholar] [CrossRef]
- Orfanus, D.; De Freitas, E.; Eliassen, F. Self-Organization as a Supporting Paradigm for Military UAV Relay Networks. IEEE Commun. Lett. 2016, 20, 804–807. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Unmanned Aerial Vehicle with under Laid Device-to-Device Communications: Performance and Tradeoffs. IEEE Trans. Wirel. Commun. 2016, 15, 3949–3963. [Google Scholar]
- Guo, K.; Li, X.; Xie, L. Simultaneous cooperative relative localization and distributed formation control for multiple UAVs. Sci. China Inf. Sci. 2020, 63, 119201. [Google Scholar] [CrossRef]
- Zheng, Z.; Sun, J.; Wang, W.-Q.; Yang, H. Classification and localization of mixed near-field and far-field sources using mixed-order statistics. Signal Process. 2018, 143, 134–139. [Google Scholar] [CrossRef]
- Li, W.; Jelfs, B.; Kealy, A.; Wang, X.; Moran, B. Cooperative Localization Using Distance Measurements for Mobile Nodes. Sensors 2021, 21, 1507. [Google Scholar] [CrossRef]
- Xu, C.; Wang, Z.; Wang, Y.; Wang, Z.; Yu, L. Three passive TDOA-AOA receivers-based flying-UAV positioning in extreme environments. IEEE Sens. J. 2020, 20, 9589–9595. [Google Scholar] [CrossRef]
- Kang, Y.; Wang, Q.; Wang, J.; Chen, R. A high-accuracy TOA-based localization method without time synchronization in a three-dimensional space. IEEE Trans. Ind. Inform. 2018, 15, 173–182. [Google Scholar] [CrossRef]
- Mur-Artal, R.; Montiel, J.M.M.; Tardos, J.D. ORB-SLAM: A versatile and accurate monocular SLAM system. IEEE Trans. Robot. 2015, 31, 1147–1163. [Google Scholar] [CrossRef]
- Russell, J.S.; Ye, M.; Anderson, B.D.O.; Hmam, H.; Sarunic, P. Cooperative localization of a GPS-denied UAV using direction-of-arrival measurements. IEEE Trans. Aerosp. Electron. Syst. 2019, 56, 1966–1978. [Google Scholar] [CrossRef]
- Arafat, M.Y.; Moh, S. Localization and clustering based on swarm intelligence in UAV networks for emergency communications. IEEE Internet Things J. 2019, 6, 8958–8976. [Google Scholar] [CrossRef]
- Yeasir, A.M.; Moh, S. Bio-inspired approaches for energy-efficient localization and clustering in UAV networks for monitoring wildfires in remote areas. IEEE Access 2021, 9, 18649–18669. [Google Scholar]
- Biswas, P.; Liang, T.-C.; Toh, K.-C.; Ye, Y.; Wang, T.C. Semidefinite programming approaches for sensor network localization with noisy distance measurements. IEEE Trans. Autom. Sci. Eng. 2006, 3, 360–371. [Google Scholar] [CrossRef]
- Guo, K.; Li, X.; Xie, L. Ultra-wideband and odometry-based cooperative relative localization with application to multi-uav formation control. IEEE Trans. Cybern. 2019, 50, 2590–2603. [Google Scholar] [CrossRef] [PubMed]
- Baldi, S.; Roy, S.; Yang, K. Towards adaptive autopilots for fixed-wing unmanned aerial vehicles. In Proceedings of the 2020 59th IEEE Conference on Decision and Control (CDC), Jeju, Republic of Korea, 14–18 December 2020; pp. 4724–4729. [Google Scholar] [CrossRef]
- Wang, X.; Roy, S.; Farì, S.; Baldi, S. Adaptive Vector Field Guidance Without a Priori Knowledge of Course Dynamics and Wind. IEEE/ASME Trans. Mechatron. 2022, 27, 4597–4607. [Google Scholar] [CrossRef]
- Shang, Y.; Ruml, W. Improved MDS-based localization. In Proceedings of the IEEE INFOCOM 2004, Hong Kong, China, 7–11 March 2004; Volume 4, pp. 2640–2651. [Google Scholar]
- Wan, C.; You, S.; Jing, G.; Dai, R. A distributed algorithm for sensor network localization with limited measurements of relative distance. In Proceedings of the 2019 American Control Conference (ACC), Philadelphia, PA, USA, 10–12 July 2019; pp. 4677–4682. [Google Scholar]
- Zhang, Y.; Chen, Y.; Liu, Y. Towards unique and anchor-free localization for wireless sensor networks. Wirel. Pers. Commun. 2012, 63, 261–278. [Google Scholar] [CrossRef]
- Parulpreet, S.; Khosla, A.; Kumar, A.; Khosla, M. Optimized localization of target nodes using single mobile anchor node in wireless sensor network. AEU-Int. J. Electron. Commun. 2018, 91, 55–65. [Google Scholar]
- Liu, Y.; Wang, Y.; Wang, J.; Shen, Y. Distributed 3D relative localization of UAVs. IEEE Trans. Veh. Technol. 2020, 69, 11756–11770. [Google Scholar] [CrossRef]
- Wang, W.; Yang, Y.; Liu, W.; Wang, L. PMDV-hop: An effective range-free 3D localization scheme based on the particle swarm optimization in wireless sensor network. KSII Trans. Internet Inf. Syst. (TIIS) 2018, 12, 61–80. [Google Scholar]
- Nguyen, T.V.; Jeong, Y.; Shin, H.; Win, M.Z. Least square cooperative localization. IEEE Trans. Veh. Technol. 2015, 64, 1318–1330. [Google Scholar] [CrossRef]
- Wang, G.; Li, Y.; Ansari, N. A semidefinite relaxation method for source localization using TDOA and FDOA measurements. IEEE Trans. Veh. Technol. 2013, 62, 853–862. [Google Scholar] [CrossRef]
- Shang, Y.; Ruml, W.; Zhang, Y.; Fromherz, M. Localization from connectivity in sensor networks. IEEE Trans. Parallel Distrib. Syst. 2004, 15, 961–974. [Google Scholar] [CrossRef]
- Zou, Y.; Liu, H.; Wan, Q. An Iterative Method for Moving Target Localization Using TDOA and FDOA Measurements. IEEE Access 2018, 6, 2746–2754. [Google Scholar] [CrossRef]
- Calafiore Giuseppe, C.; Carlone, L.; Wei, M. A distributed technique for localization of agent formations from relative range measurements. IEEE Trans. Syst. Man Cybern.-Part A Syst. Hum. 2012, 42, 1065–1076. [Google Scholar] [CrossRef]
- Pratik, B.; Lian, T.-C.; Wang, T.; Ye, Y. Semidefinite programming based algorithms for sensor network localization. ACM Trans. Sens. Netw. (TOSN) 2006, 2, 188–220. [Google Scholar]
- Man-Cho, A.; Ye, Y. Theory of semidefinite programming for sensor network localization. Math. Program. 2007, 109, 367–384. [Google Scholar]
- Anstreicher, K.M. Semidefinite programming versus the reformulation-linearization technique for nonconvex quadratically constrained quadratic programming. J. Glob. Optim. 2009, 43, 471–484. [Google Scholar] [CrossRef]
- Zheng, Z.; Zhang, H.; Wang, W.; So, H.C. Source localization using TDOA and FDOA measurements based on semidefinite programming and reformulation linearization. J. Frankl. Inst. 2019, 356, 11817–11838. [Google Scholar] [CrossRef]
- Raguraman, P.; Ramasundaram, M.; Balakrishnan, V. Localization in wireless sensor networks: A dimension based pruning approach in 3D environments. Appl. Soft Comput. 2018, 68, 219–232. [Google Scholar] [CrossRef]
Figure 1.
Node localization algorithms in UAV networks.
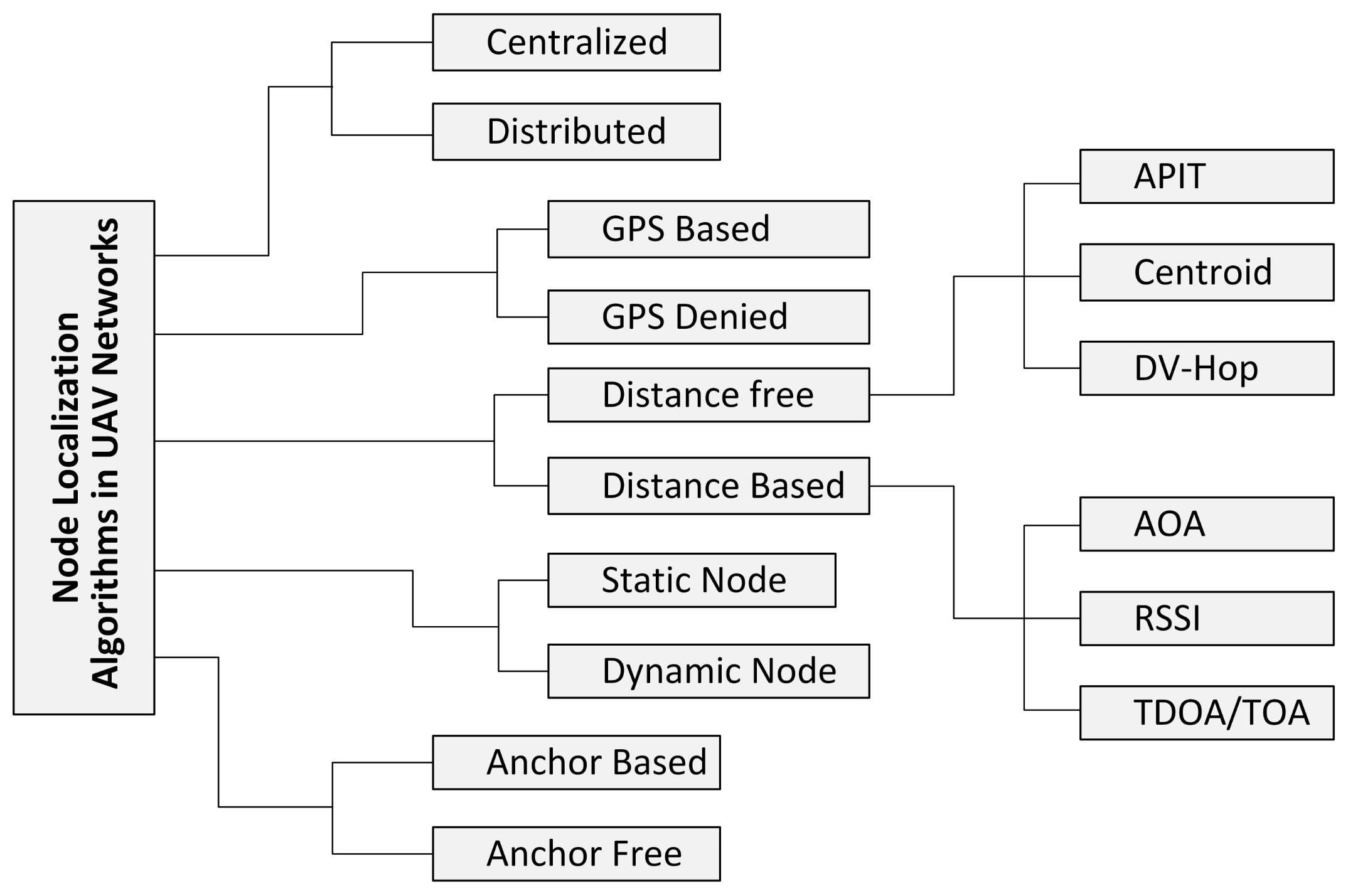
Figure 2.
Localization model of UAVs in 3D space, in which green UAV and blue UAV represent anchors and target nodes, respectively.
Figure 2.
Localization model of UAVs in 3D space, in which green UAV and blue UAV represent anchors and target nodes, respectively.

Figure 3.
A network localization model in 3D space. The blue points represents the anchor nodes, and the red point represents the unknown node to be located.
Figure 3.
A network localization model in 3D space. The blue points represents the anchor nodes, and the red point represents the unknown node to be located.

Figure 4.
Location update rule in I-GWO.
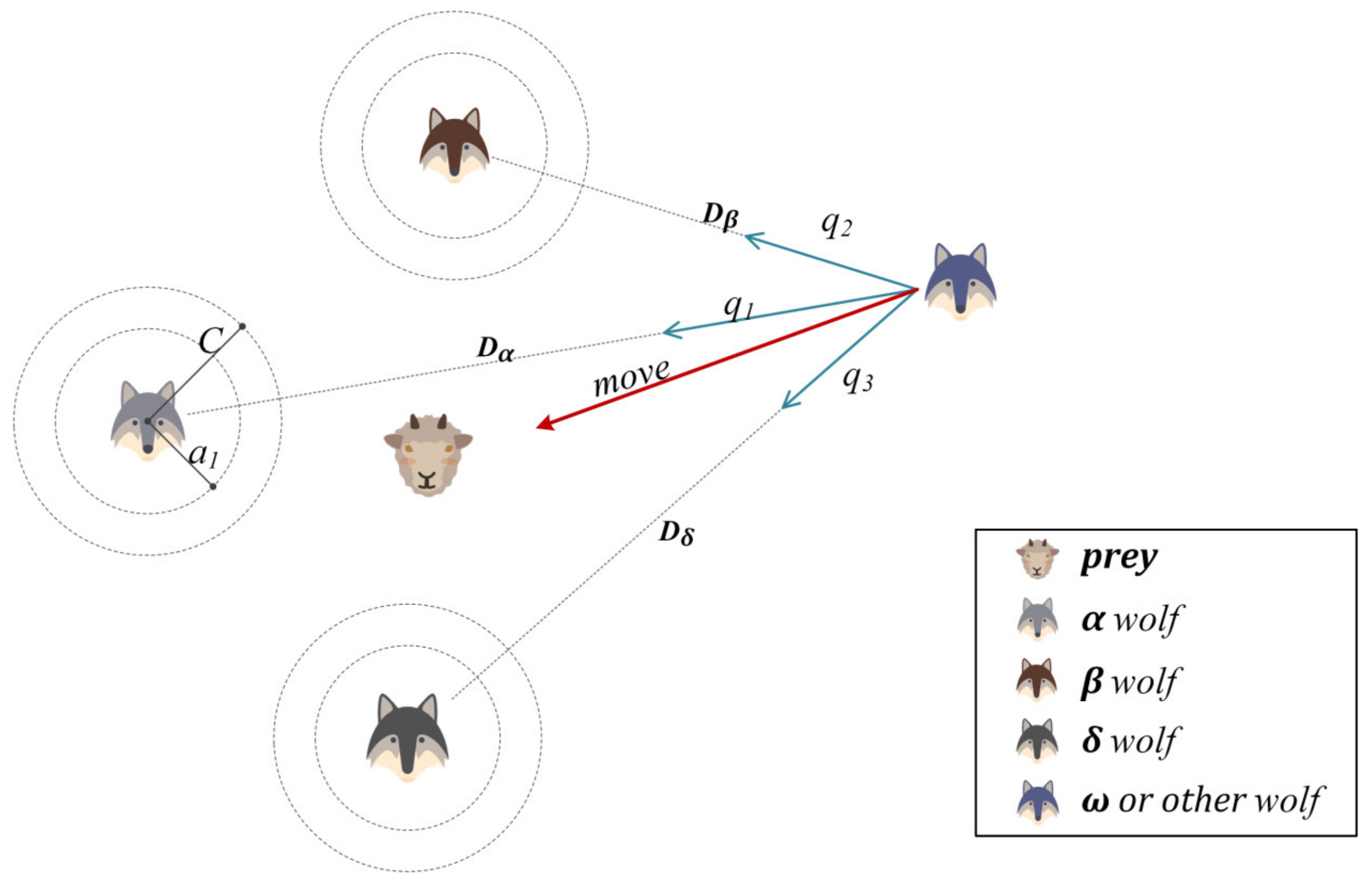
Figure 5.
Comparison of LS, MDS, SDP + O, and SDP + RLT localization results in the same scenario with m = 6, n = 50 and R = 300. The “∆”represents the anchor node, the ”○” represents the actual position of the UAV, and the “*”represents the estimated position.
Figure 5.
Comparison of LS, MDS, SDP + O, and SDP + RLT localization results in the same scenario with m = 6, n = 50 and R = 300. The “∆”represents the anchor node, the ”○” represents the actual position of the UAV, and the “*”represents the estimated position.

Figure 6.
Comparison of RMSE vs. UAV numbers.
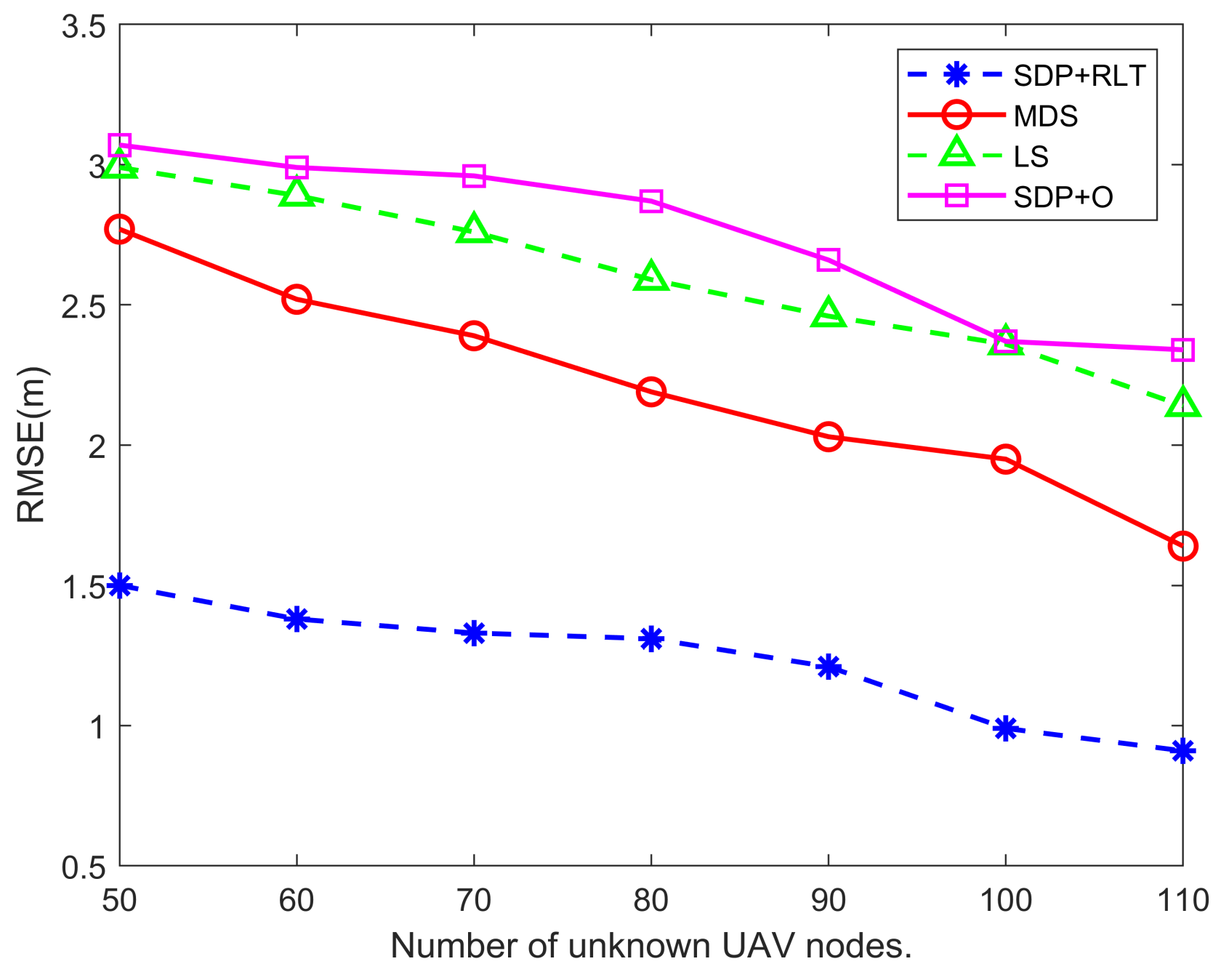
Figure 7.
Comparison of RMSE vs. anchor numbers.

Figure 8.
Comparison of RMSE vs. noise ratios.
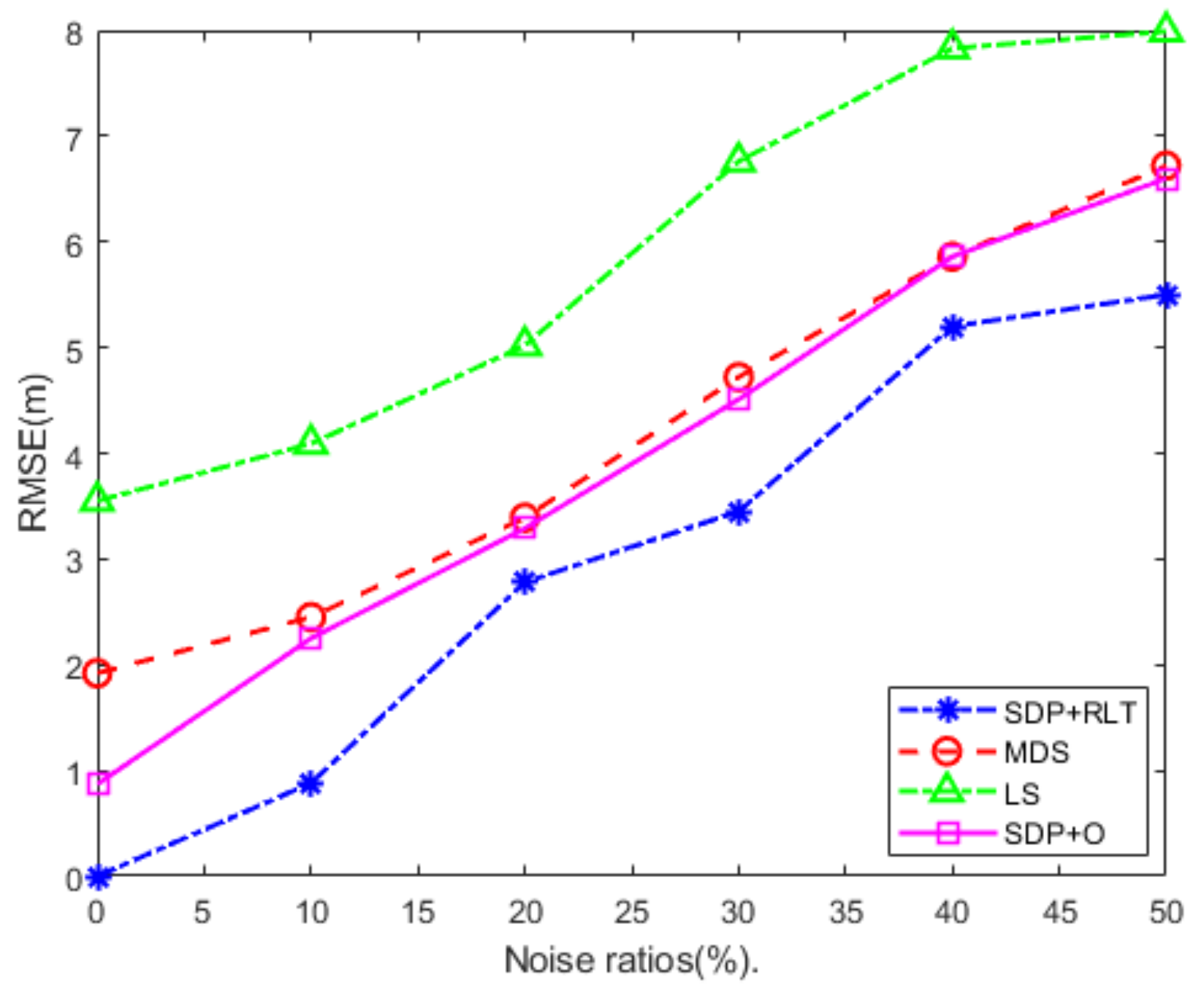
Figure 9.
Comparison of RMSE vs. iterations.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Nomenclature of used terms in this paper.
| Symbol | Definition |
|---|---|
| Na, Nu, NR | Set of anchors and target UAVs, where NR = Na + Nu |
rij, αij, sj, nij X, Y, Z | Coordinate of the anchor UAVs and target UAVs Distance between target UAV and UAV (or anchor) Set of distance pairs of UAV/UAV and UAV/anchor Amplitude, waveform, and noise of UAV signal Gaussian noise of distance measurements X is UAV position matrix and Y = XTX, Z = [I3 X; XT Y] |
| l, u U a, r1, r2 | Lower and upper bounds of variables in X Variables greater than 1 and less than e Population of gray wolves Convergence factor and two random numbers of [0,1] |
Table 2.
Number of UAVs as a function of RMSE for different localization algorithms.
| Localization Algorithm/RMSE | Numbers of Unknown UAV Nodes | ||||||
|---|---|---|---|---|---|---|---|
| 50 | 60 | 70 | 80 | 90 | 100 | 110 | |
| LS | 2.9912 | 2.8923 | 2.7633 | 2.5908 | 2.4648 | 2.3567 | 2.1435 |
| MDS | 2.7732 | 2.5243 | 2.3957 | 2.1894 | 2.0362 | 1.9533 | 1.6415 |
| SDP + O | 3.0796 | 2.9923 | 2.9617 | 2.8796 | 2.6695 | 2.3709 | 2.3474 |
| SDP + RLT | 1.5057 | 1.3809 | 1.3385 | 1.3196 | 1.2061 | 0.9921 | 0.9107 |
Table 3.
Number of iterations as a function of RMSE for different optimization algorithms.
| Optimization Algorithm/RMSE | Iterations | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| 0 | 20 | 40 | 60 | 80 | 100 | 120 | 140 | 160 | |
| PSO | 1.4602 | 0.6434 | 0.3061 | 0.1853 | 0.1302 | 0.0794 | 0.0337 | 0.0036 | 0.0015 |
| HPSO | 1.7132 | 0.7266 | 0.3068 | 0.0988 | 0.0287 | 0.005 | 0.0027 | 5.56 × 10−5 | 7.35 × 10−7 |
| HGWO | 2.2296 | 1.7022 | 0.9412 | 0.5926 | 0.2205 | 0.1899 | 0.0274 | 0.0038 | 0.0006 |
| I-GWO | 0.6757 | 0.1209 | 0.0395 | 0.0096 | 0.0061 | 0.0021 | 3.21 × 10−6 | 2.57 × 10−8 | 1.82 × 10−11 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Li, Z.; Xia, X.; Yan, Y. A Novel Semidefinite Programming-based UAV 3D Localization Algorithm with Gray Wolf Optimization. Drones 2023, 7, 113. https://doi.org/10.3390/drones7020113
AMA Style
Li Z, Xia X, Yan Y. A Novel Semidefinite Programming-based UAV 3D Localization Algorithm with Gray Wolf Optimization. Drones. 2023; 7(2):113. https://doi.org/10.3390/drones7020113
Chicago/Turabian StyleLi, Zhijia, Xuewen Xia, and Yonghang Yan. 2023. "A Novel Semidefinite Programming-based UAV 3D Localization Algorithm with Gray Wolf Optimization" Drones 7, no. 2: 113. https://doi.org/10.3390/drones7020113