
A Comprehensive Review of Scab Disease Detection on Rosaceae Family Fruits via UAV Imagery




1
School of Physics and Electronic Engineering, Jiaying University, Meizhou 514015, China
2
Electronic Engineering Department, Sir Syed University of Engineering & Technology, Karachi 75300, Pakistan
3
Bristol Robotics Laboratory, University of West England, Bristol BS16 1QY, UK
4
Department of Engineering Design and Mathematics, University of West England, Bristol BS16 1QY, UK
*
Author to whom correspondence should be addressed.
Drones 2023, 7(2), 97; https://doi.org/10.3390/drones7020097
Submission received: 5 January 2023
/
Revised: 17 January 2023
/
Accepted: 27 January 2023
/
Published: 30 January 2023
(This article belongs to the Special Issue Advances in UAV Detection, Classification and Tracking-II)
Abstract
:Disease detection in plants is essential for food security and economic stability. Unmanned aerial vehicle (UAV) imagery and artificial intelligence (AI) are valuable tools for it. The purpose of this review is to gather several methods used by our peers recently, hoping to provide some knowledge and assistance for researchers and farmers so that they can employ these technologies more advantageously. The studies reviewed in this paper focused on Scab detection in Rosaceae family fruits. Feature extraction, segmentation, and classification methods for processing the UAV-obtained images and detecting the diseases are discussed briefly. The advantages and limitations of diverse kinds of UAVs and imaging sensors are also explained. The widely applied methods for image analysis are machine learning (ML)-based models, and the extensively used UAV platforms are rotary-wing UAVs. Recent technologies that cope with challenges related to disease detection using UAV imagery are also detailed in this paper. Some challenging issues such as higher costs, limited batteries and flying time, huge and complex data, low resolution, and noisy images, etc., still require future consideration. The prime significance of this paper is to promote automation and user-friendly technologies in Scab detection.
1. Introduction
Rosaceae fruits are grown extensively and cultivated globally. Among Rosaceae family members, apples, peaches, cherries, strawberries, avocadoes, and almonds, are produced on a larger scale due to their higher nutritional values. The production of these fruits is highly influenced by pests and different diseases. Among these diseases, the Scab is the most acute fungal disease that infects the leaves as well as the fruits. It is a threat that results in inadequate quality and heavy wastage of Rosaceae fruits. Serious considerations and accurate detection systems are essential to detect this disease at the initial stages [1,2]. Rosaceae fruits have abundant leaves that are observed to detect diseases and sustain production. This observation requires automation through advanced technologies such as artificial intelligence (AI)-driven unmanned aerial vehicles (UAVs) that can capture multiple and enormous quantities of data, store images, reduce timely processes, allow spraying on the required infected areas only, and so on. Similarly, by using subdomains of AI, deep learning (DL), and machine learning (ML) algorithms, healthy and infected leaves can be identified and classified with greater accuracy. The studies reported in [3,4] employed these technologies and detected Scab disease with greater accuracies, resulting in sustainable production.
Background: Earlier experts were hired for manual tree monitoring, foliage examination, and disease detection [5]. They were skilled in their domains and had complete awareness of the diseases and their treatments. However, this manual diagnosis was troublesome, error-subjective, less accurate, expensive, time-consuming, labor-intensive, and required expertise. In the early 1960s, mechanical laboratories, livestock variables, and fertilizer usage expanded the scale of agricultural production. To improve detection efficiency, automatic detection technology emerged as the times required. Automatic detection systems explored by AI techniques replaced manual work with mechanical work and gave highly accurate disease detection in less time [6,7].
Related Work: Many studies have employed AI techniques for Scab detection in Rosaceae fruits. The outcomes of their research show the significance of applying DL and ML approaches for feature extraction, image segmentation and classification, and the use of UAV imagery. The analysis in [8] provides reviews on various remote sensing techniques, features, models, and algorithms to monitor pests, Scab, and other diseases in apples, peaches, and other plants. One study [9] suggests remote sensing using UAVs for detecting diseases and weeds, estimating the quality and production of fruits, classifying trees, etc. It concludes that UAVs serve as powerful tools not only for site management but also for individual tree management. Analysis in [10] reviews current applications of UAV imaging for mapping and detection of diseases, pests, and weeds. Research in [11] lists various Internet of Things (IoT) devices such as UAVs, sensors, and harvesting drones for agricultural tasks. It describes the benefits of these devices that dominate the barriers to disease detection and other agricultural tasks.
The study in [12] reviews the previous work of numerous authors who describe the use of hyperspectral imaging to detect Scab and other diseases. The findings show that using UAVs, preprocessing of hyperspectral images, vegetation index, ML, and DL methods provide efficient results for disease detection. Extensive literature on image processing and ML techniques is given in [13]. The best results for Scab and various disease detection, classification, and other applications related to the Rosaceae family and other fruits were obtained by using DL approaches. In [14], the researchers applied a DL algorithm and three classical ML algorithms to detect Scab and other diseases in apples, peaches, cherries, and various fruits. The results prove the dominance of the DL algorithm over ML algorithms in terms of accuracy and simplicity. The study in [15] details challenges and trends for Scab and other disease detection while applying DL techniques. It also exhibits the significance of using different sample sizes and hyperspectral imaging for detecting diseases at preliminary stages.
Motivation and Contribution: Agricultural researchers are adopting these advanced technologies and systems for Scab detection. The motivation for this paper is to update them concerning these trending technologies, identify gaps in methodologies, and provide comprehensive knowledge on approaches for overseeing the gaps. We not only discuss recent challenges in using UAVs for disease detection, but also compare and gather into a single platform the novel AI approach employed by previous researchers. Relevant articles from 2017 to 2022 are summarized for assisting farmers and researchers. We used Google Scholar along with other scientific repositories: ScienceDirect, SAGE Journals, SpringerLink, IEEE Xplore, and Wiley Online Library Journal to search for relevant articles. The search was conducted with a combination of terms from three groups. The first group has the terms “Scab” and “Venturia inaequalis” and the second group has the terms “UAV”, “unmanned aerial vehicles”, and “drones”. The third group contains the names of Rosaceae family fruits: “apple”, “peach”, “pear”, strawberry”, and “cherries”. After selecting the first set of references, the related articles were also searched. This research focused on articles using DL methods and imaging sensors. Other articles that are focused on other sensors are excluded. The contributions of this paper include:
- Evaluating challenges faced in Scab detection based on UAV images.
- Providing extensive analysis of AI techniques and categorizing them into feature extraction, segmentation, and classification groups.
- Exploring UAV imagery approaches.
- Summarizing the strengths and limitations of applied technologies in the reputed articles.
Organization: This paper is divided into sections as shown in Figure 1. Section 2 presents the state-of-the-art in the research field. Section 3 describes Scab disease in Rosaceae fruits. Section 4 explains recent challenges in Scab detection. Section 5 details current methodologies to overcome the challenges. Section 6 evaluates feature extraction techniques and reviews studies that applied these techniques for Scab detection in Rosaceae fruits. Section 7 analyzes the segmentation and classification methods of datasets and provides a comparative analysis of research papers that employed them for Scab detection. Section 8 discusses and reviews the literature that describes different UAV imagery approaches. Section 9 presents the discussion and concludes this review paper; Section 10 highlights challenges with prospects.
2. State-of-the-Art in the Research Field
Automation and digitalization were increasingly adopted for monitoring purposes in various sectors during the coronavirus disease 2019 (COVID-19) pandemic. The automatic technologies obtained by combining AI techniques with UAVs resulted in enhancing agricultural production [16]. This high-tech innovation is becoming an integral part of numerous research activities and is broadly enhancing the agriculture sector. UAVs use simultaneous localization and mapping (SLAM) technology for autonomous driving [17]. Being equipped with a camera or other sensors, it identifies obstacles, recognizes its position, and avoids collision with other UAVs. These are boosted with improved communication and data-processing speed. The widely applied categories of UAVs are fixed-wing and rotary-wing. Rotary-wing UAVs are further categorized into helicopters, quadcopters, hexacopters, and octocopters [18]. These are becoming more efficient, dependable, and robust tools in detecting diseases at their initial stages and for spraying fungicides. Being equipped with sensors, UAVs are highly effective in disease assessment [19]. These detect diseases, allow correct decision-making, and apply appropriate control measures. UAVs offer high-resolution imagery for efficient disease detection and analysis. These collect data with a higher resolution even in challenging weather conditions, thus providing accurate fruit health assessment and decision-making. Spraying fungicides using UAVs is a current means of disease control [20]. Researchers are optimizing different parameters such as speed, altitude, duration of the flight, tank capacities, etc., for efficacy. Operating at lower heights reduces mass spraying whereas operating at higher heights allows disease management in mountainous areas as well [21]. Their rotors generate downward airflow that makes droplets penetration easier. These are considered safer for mapping larger or uneven areas.
All the benefits are enhancing the application of UAVs in the agriculture sector. The United States (US), Australia, India, South Africa, Japan, China, Europe, Canada, and other countries are using swarm technology on a wider scale [22]. Additionally, these countries are employing controller systems, propulsion systems, navigation systems, camera systems, frames, batteries, and other devices for numerous agricultural purposes [23]. Major purposes are field mapping, disease detection, crop spraying, livestock monitoring, smart greenhouse, and others. In the US, the agriculture drone market is growing rapidly due to numerous applications of UAVs in agriculture [24]. In Australia, growers in Queensland are using this technology for improving on-farm tasks. Currently, Pakistan is also employing UAVs equipped with sensors and other IoT devices for disease detection, pest monitoring, temporal and geospatial sampling, mapping, fertilization, and others [25]. In India, the agriculture department of Rajasthan is employing UAVs for multiple purposes while improving parameters and ensuring safety features. They have used this technology for fighting locust attacks. South Africa is adopting smart agriculture not only to expand production but also to contribute to the environment by cutting costs and saving resources [12]. Researchers in China and Japan are employing UAVs, satellites, and AI techniques to formulate such strategies that will diagnose the disease before it becomes visible [26]. They are applying robotics with deep learning to propel the harvesting task. Soft grippers are making harvesting tasks possible for UAVs. However, this requires further improvement of technology and tools for perfection. Moreover, researchers are working on multirobot technologies for agriculture [27]. In the coming years, they will use UAVs and UGVs (unmanned ground vehicles) for performing combined tasks. Table 1, summarize the recent technologies that is used for UAV imagery.
3. Scab Disease in Rosaceae Fruits
Scab is a serious disease that produces lesions or dark blotches on the fruits, leaves, and young twigs of Rosaceae fruits. The symptoms of Scab are not identical at all stages and depend upon when the infection took place [28]. At first, chlorotic or yellow spots appear on leaves, and as the disease progresses olive or dark-colored spots appear not only on leaves but also on fruits. When the disease becomes severe, velvety spots appear on the leaves’ undersurface. Leaves turn yellow and start falling. Then, these spots formed on stems force the flower to drop. The fruits affected by these spots, which first appear as olive-green spots, later become black or brown lesions. The fruits can become cracked and malformed and dropped by the plant prematurely [29]. Sometimes Scab appears as black spots on Rosaceae fruits. Scabs cause severe surface blemishing that results in high crop losses.
3.1. Causes of Scab Disease
Foothill and coastal areas have moist and cool early summer and spring weather. These are favorable areas and conditions for pathogen development. In addition to these factors, heavy rain is also a major factor that causes Scab [30]. Scab is caused by the pathogen fungus Venturia inaequalis. This pathogen found in all the regions where Rosaceae fruits are grown. It can infect the trees at any time, especially in spring. It affects the leaves and then produces and releases spores into the air. These spores are carried by rain, wind, irrigation, or developing fruit. If the spores are dropped on the surface, these spores remain stuck to the surface, break through the cuticle, germinate, and develop a new secondary infection. This secondary infection occurs in specific periods, within 9–17 days, and may repeat its cycle several times during the growing season [31]. This fungal disease is a main issue in the production of commercial Rosaceae fruits. It affects the quality of the fruits and reduces production. If it is not treated properly, it weakens the trees and flower bud formations, which leads to an increase in economic loss. This disease has no proper treatment; therefore, prevention and early detection are important for its control.
3.2. Ways of Prevention
The best way to prevent Scab is to select disease-resistant varieties, which have a wide range from moderately resistant to very resistant. Another preventive measure is to plant trees with sufficient spaces and in open canopies where sunlight is available. Planting trees with spaces allows trees to mature properly and sunlight will dry the leaves quickly. This reduces the chances for spore germination [19]. The other important measure is pruning. Removing fallen leaves is required not only in autumn but also during the entire growing season. Leaves diagnosed with Scab must not be thrown in the compost; however, they must be disposed of properly. The application of urea after harvest is also beneficial. Proper sanitation is also a prime prevention measure. Changing the schedule to water trees and covering the soil with compost also prevents the spread of Scab. If a tree loses most of its leaves, then the application of fungicide is the only option. The fungicide does not have any effect on the infected trees, but it breaks the disease cycle by creating a protective coating that keeps the spores inactive. For effective disease management, the timing of fungicide application is quite important [3].
3.3. Early Detection Methods
Numerous ways can be adopted to perceive the pathology of Rosaceae fruits. Sometimes the symptoms appear randomly, therefore these are mostly ignored. Similarly, overcrowded trees and leaves hinder symptoms and when these symptoms become noticeable it becomes difficult to take any precautions or to treat Scab. These reasons pose challenges in Scab identification and treatment; therefore, early Scab diagnosis is essential through precise and automatic disease identification [32]. The agriculture industry is adopting sensors, advanced AI tools, and information perception systems for achieving images and information to make precise decisions for the prevention, identification, and classification of diseases. In [33], three imaging devices: a thermal camera, a multispectral camera, and a 3D sensor, were used for early Scab detection in apples. The study reported in [34] applied a modified MobileNet CNN model for diagnosing Scab and other diseases at the initial stages in avocados. In [35], a promising PeachNet structure comprising VGG-19, mask R-CNN, and a regional proposal network (RPN) was used for the early detection of Scab in peaches.
4. Recent Challenges in Scab Detection
Automatic operations for Scab detection require no direct human interactions. The most appropriate solution for this is the use of UAVs equipped with imaging sensors and advanced AI algorithms [19]. This combined technology has benefits in agricultural operations; however, owing to challenges, their usage is still unpopular and restricted in many countries. Figure 2 highlights these challenges that limit UAV application for Scab detection, which are described in the following subsections.
4.1. Anomalies of Symptoms and Lab Analysis for Scab Detection
Diseases are first detected by analyzing the symptoms. In some cases, symptoms of Scab disease are quite like other diseases because of fine-grained multiscale distribution, the same color texture between background and disease, and the growth of multiple diseases on a leaf [36]. Owing to this symptom relevancy, appropriate Scab detection becomes difficult. However, sometimes Scab shows variation in symptoms. This occurs due to several reasons such as environmental factors, disease developmental stages, presence of other diseases. Environmental factors such as humidity, sunlight, temperature, wind, etc., affect the symptoms of Scab disease in various parts of trees, whereas Scab also exhibits different symptoms at different developmental stages. In [37], many images were obtained during four months under different environmental conditions and developmental stages on old and young leaves of apples. The dataset of Scab images showed the variation in symptoms, and many other images contained several similar-appearing symptoms that required further expert confirmation. Moreover, molecular techniques and laboratory analysis for Scab detection for every fruit are not possible in forests or larger fields. Additionally, transmission charges are also incurred to send the images to distant laboratories for analysis. Therefore, such methodologies are required that will overcome all of these challenges.
4.2. Capacity Limitations of UAV Components That Restrict Flying
We discussed limitations of UAVs in previous papers that include challenges of control, path planning, obstacle detection and avoidance, navigation and guidance, and others [38]. In this paper, various restricted capacity issues are discussed that hinder the performance of UAVs in larger fields of Rosaceae fruits. These issues are limited capacities of payload, battery, and in-built data storage. Most UAVs have limited payload capacity that constrains the battery size and sensor. The limited battery demands shorter flying time and requires a quick interchange of batteries for covering larger agricultural areas of apple orchards. Only flying at higher altitudes can cover these areas, but this results in lower resolution images [39]. UAVs have less in-built storage capacity, so the captured data must be sent to other platforms. To cope with these challenges, secure and cost-effective devices along with strong Internet connections or IoT devices are also core requirements [40].
4.3. Effects of Forest Attributes on UAVs and Images
Farms and forests have different-sized trees, uneven areas, and uncertain climatic conditions. Owing to variations in the heights and thickness of trees, UAVs require proper obstacle-avoidance and path planning. While flying above different-sized Rosaceae fruit trees, the complex motion of UAVs must manage to allow accurate maneuvers. UAVs must be capable of entering or exit any tree row and navigate to the other rows easily [41]. Uneven areas have varying altitudes owing to which different elevation angles are formed between the farmland and UAVs. Both issues result in path loss and influence the coverage radius and network services, which lead to crashes. Especially fixed-wing UAVs in such rough places are usually subject to crashes. Climate plays a significant part in obtaining plant images through UAVs. The speed of UAVs is influenced by high winds and rain [42]. This causes angular movement leading to overlapping and distortions among images. Moreover, high wind changes the position of leaves and affects visibility. This leads to inconsistencies in images and improper disease detection [43]. Therefore, the effects in images resulting from all these issues need further analysis and interpretation. It is also essential to gather knowledge regarding the attributes of forests and larger fields before deploying UAVs.
4.4. Limitations of Sensors and Factors Causing Visibility Issues in Images
The interaction process between the Scab pathogen and Rosaceae fruits can be determined by biochemical and physiological parameters but are restricted to be reflected in specific reflectance wavelength. Sensors provide higher spatial, spectral, radiometric, and temporal resolution images. While obtaining images of Rosaceae fruits via UAVs, sensors play an important role but have different impacts on different dimensions of resolution [44]. The altitude of the sensor above the ground governs the spatial resolution. If the sensor is closer to the Rosaceae fruit, then the coverage is smaller, however, the spatial resolution is greater. Red, green–blue (RGB) sensors capture higher spatial resolution images as compared to multispectral and hyperspectral sensors. RGB sensors provide finer details about Scab, but they are restricted to measuring only three electromagnetic spectrum bands; therefore, they give less accuracy in Scab detection in terms of spectral resolution. Multispectral sensors can capture high spatial resolution and determine reflectance in the near-infrared (NIR) bands. They assist in early Scab detection but are the least affordable sensors. Similarly, hyperspectral sensors are also expensive but may deliver images with low spatial resolution. Multispectral and hyperspectral sensors yield higher spectral resolution than RGB sensors. Hyperspectral sensors collect a large amount of spectral data, which causes difficulties in acquiring relevant details about Scab disease. They yield continuous and high spectral ranges that help in differentiating Scab from other diseases, even in the presence of minor differences and early detection of Scab. Thermal sensors provide the temperature of the surrounding objects in the images. Therefore, they provide low dimensions of resolution in images for Scab detection.
Different field-based platforms for Scab detection are vehicles, tripods, UAVs, satellites, helicopters, etc. These platforms retain high spatial resolution and refine the measurement throughput to a certain extent. The satellite platform provides free images while covering large areas. These images complement UAV imagery but are restricted to low resolution [20]. Therefore, it is not suitable for Scab detection. Satellites give the lowest spatial resolution whereas UAV platforms offer high spatial and temporal resolution along with high throughput; therefore, they are best for Scab detection. However, flight parameters and stability influence the sensors, dimensions of the resolution, and spectral discrimination. For example, changes in UAV speed and altitude also restrict the sensor to capture clear images. Another factor is the noise of these sensors that influence the visibility of images. All these factors result in overlapping, uneven resolution, and distortion in images. Considering different sensors and platforms, none can yield high resolution in all dimensions. Researchers are still exploring sensors that can provide high-resolution temporal, spatial, spectral, and radiometric data, which remain uninfluenced by all these factors. Moreover, high-resolution spectral and spatial images are necessary for accurate Scab detection in Rosaceae fruits, so that features can be distinguished properly [44,45].
Moreover, UAV platforms also affect the sensors and dimensions of resolutions.
4.5. Requisite of Segmentation and Classification
The UAV-captured data must have proper parameters such as disease differentiation, detection, and severity quantification. Nevertheless, these images possess huge and complex data. In most cases, mixed pixels of soil or shadows are usually inevitable, which makes the background disorganized and noisy. Therefore, these images require multiple operations such as feature extraction, segmentation, and classification for accurate Scab detection. The segmentation is complicated if the target fruit, for example, green apple, matches the color of the background [46]. If the part or features are not extracted and segmented properly, the classification or Scab detection accuracy will decline, which leads to incorrect disease identification. Segmentation and classification are performed with DL models and algorithms. However, they cannot extract effective features with too few convolutional layers. To achieve satisfying outcomes, CNN requires more convolutional layers, which will exceed the computational time and require a large training dataset and IoT system support [47].
4.6. Application Issues of UAVs
Farmers and researchers have several concerns regarding UAVs that give rise to user-acceptance issues [48]. Some reasons include handling issues, privacy issues, security issues, permission issues, huge investments, and other miscellaneous factors. Managing the drones properly is not easy for farmers; therefore, there is a risk of damage and injuries. In [39], during its first flight, the UAV became unresponsive due to mechanical failure. Similarly, they are concerned about the privacy of the captured data as well as cyber security issues. The study reported in [49] emphasized the security analysis of drones. It suggested that security requirements vary according to the use case. Lightweight hardware also was proposed in that it ensures the integrity and confidentiality of the data sent by the drone and the ground station. This hardware solution proved to be a power-efficient computation platform; however, owing to extra weight, its application was restricted. Additionally, the high sensor dependency and malware of drones along with the dynamic nature and complexity of wireless communication networks were considered security vulnerabilities for the application of drones. In this study, global positioning system (GPS) spoofing, data interception, denial of service, malware infection, the man-in-the-middle, wormholes, and jammers were all detailed as possible threats and attacks that jeopardize the security and reliability of drone communication.
Operating UAVs on farms requires special permission from regulating authorities. Many authorities do not allow UAV integration due to several reasons [50]. For example, permission was granted only after several days by Transport Canada to deploy UAVs in apple orchards [39]. Moreover, huge investments are essential for advanced components and sensors for UAVs. Small-scale farmers are unable to make such arrangements. Other miscellaneous factors that negatively influence its adoption include the location of farms, compatibility of existing practices with new and complex techniques, and others [51]. All these challenges are barriers to the application of UAVs for Scab identification and other agricultural purposes. More advanced and feasible solutions are essential to overcome these issues.
5. Recent Methodologies to Overcome Challenges
This section describes various trending methodologies that efficiently manage the hurdles of the abovementioned challenges. All these evolving technologies are significant for accurate Scab identification even in the presence of symptom anomalies and for extending the capacities of UAV components along with flight duration [52]. Additionally, these approaches provide solutions to overcome the effects of forest attributes on UAVs and images, limitations of the sensors, and reduce the visibility issues in images [53]. Moreover, some developed algorithms and methods for better segmentation and classification of datasets are evaluated in this section. Different solutions that resolve the application issues of UAVs for agricultural purposes are also detailed in this section.
5.1. Advanced Approaches That Assist in Scab Detection in the Presence of Symptom Anomalies and Laboratory Analysis
Diseases are first identified based on symptoms which sometimes show relevancy or sometimes show variances [44]. Therefore, detecting Scab disease in such cases requires high-resolution images of fruits or leaves. In this context, the use of UAVs with advanced sensors is a good option. These sensors not only capture images with high spatial resolution, but also give pure pixels of trees, parts of trees, tissues, and pathogens. These mountable sensors, especially hyperspectral ones, along with platform flexibility have enabled UAVs to span leaf, plant, and observation scales that benefit the Scab detection process [54]. Connected and sensor-equipped smartphones are also advantageous in disease detection, especially in the presence of symptom anomalies [55]. Different software in smartphones performs the preprocessing of images. These smartphones can be deployed on UAVs to assist not only in detecting anomalies but also to identify the location of anomalies and reduce the transmission costs of sending the images to distant laboratories for analysis. Furthermore, the recent DL techniques are capable of identifying and differentiating a disease correctly with relevant or variable symptoms. This advancement allows early detection of Scab as well. Different researchers applied hyperspectral or multispectral imaging with the DL techniques to distinguish accurately the Scab diseases with anomalies of symptoms [56]. This combined approach analyzes and classifies UAV-acquired images of fruits or leaves with higher accuracy. Moreover, this technique applies to both laboratory analysis and UAV-based conditions. The severity of Scab disease can be measured by determining the total diseased area of fruit or by calculating the amount of disease penetration through quantification methods.
5.2. Evolving Techniques That Extend the Capacity of UAV Components and Flight Duration
With progress in technology, researchers are employing several methodologies to cope with payload or capacity issues of inbuilt components of UAVs [57]. The best solutions are the application of miniature sensors, flying at higher altitudes, usage of solar technology, software-defined storage, etc. Sensor miniaturization solves the payload constraints. Flying at higher altitudes or flying in formation will not only limit the battery resource but also saves time. Replacing the usage of larger UAVs with solar energy-equipped UAVs enhances the durability, power, and flight time of UAVs to cover larger areas [55]. Moreover, solar panels are lighter in weight, so they maintain the agility of UAVs by ensuring that UAV is lightweight. Software-defined storage such as cloud-based data storage is a cost-effective solution for in-built restricted capacity with strong Internet signals [58]. Another option is virtual storage, which is also a low-cost solution for real-time applications. For example, Bramor UAVs utilize a high-speed Internet protocol (IP) link for transmitting and storing data to its computing infrastructure, cloud computing, or ground control station (GCS) [59]. To overcome the routing and strong Internet connections, researchers are using wireless networking technologies such as the Fifth Generation (5G) and smart Bluetooth [60]. All these solutions excel in the performance and flying of UAVs.
5.3. Recent Technologies That Handle Effects of Forest Attributes
Forests have different-sized trees, uneven terrain, and different climatic conditions [61]. All these attributes affect the performance of UAVs and sensors. The advances in UAVs and IoT devices have led to the development of an unmanned aerial system (UAS) that is widely applied by numerous researchers. UASs provides complete details regarding the features of individual trees and analyzes the surface topology and unevenness in forests [62]. Another solution is the developed architectures of UAVs with different regression models and artificial neural network (ANN)-based models that forecast and update weather conditions. This real-time information enables UAVs to stay unaffected by all these factors. Furthermore, it helps in operating UAVs safely without any damage or crashes. With the evolving technology, various kinds of UAV platforms are progressing that are significant for larger fields and forest deployments. For example, miniature UAVs, which also called low-altitude platforms, are privileged to deploy in forests because of their high mobility with less cost [63]. They can stay in the air for a longer time, remaining unaffected by harsh climatic conditions and site conditions during takeoff. They easily retain the high spatial resolution and refine the measurement throughput. Another widely applied UAV platform is a multirotor UAV that can fly at different altitudes. It can fly vertically as well as horizontally and needs a smaller space for landing and takeoff. An optical sensor equipped with it can easily capture clear three-dimensional (3D) resolution images. The vertical takeoff and landing (VTOL) system in UAVs is a recent development that allows ease in maneuvering [64]. VTOL UAVs also remain unaffected by the attributes of forests and climatic conditions. Moreover, if image distortion is caused by platform tilt, position or vibration of UAVs, uneven terrains or earth curvature, or other reasons, then geometric correction can be applied to remove it.
5.4. Advanced Sensors and Approaches That Reflect Visibility in Images
The integration of sensors on a UAV depends upon their application, size, and weight. The widely applied advanced spectral sensors are RGB, thermal, multispectral, hyperspectral, and light detection and ranging (LiDAR) sensors [65]. Multispectral and RGB are cost-effective and provide higher resolutions. Besides these optical sensors, researchers are using other camera options as well that also show advantages. For example, the study reported in [66] designed a cost-effective and ultralight UAV oblique photogrammetry (OP) system using smartphones. Five digital cameras were removed from smartphones and mounted on a UAV platform. This UAV OP system obtained images from different angles and the results proved the accuracy and quality of the developed system. Similarly, researchers are focusing on using Meta optics for inexpensive and small electro-optical sensors in miniature UAVs. Sometimes the UAV-obtained images are not visible. As a solution to this issue, fixed-wing UAVs equipped with fast shutter and speedy imaging sensors can be used [67]. This limits the blurring issues while capturing images. Furthermore, advanced AI preprocessing methods can remove blur effects, visibility, noise, and distortion issues in UAV-obtained images. These methods depend upon the type and quality of an image. Some data preprocessing methods are spectral calibration, atmospheric calibration, and geometric correction [68]. These approaches are significant in removing errors. Spectral calibration employs complex techniques such as spectral interpolation, spectral normalization, and radiation transfer models. Atmospheric calibration helps to reduce surface reflectivity errors that are due to atmospheric absorption and scattering. Geometric correction removes distortion in images, as discussed above. Moreover, image enhancement, spectral smoothing, and data filtering techniques can be applied to remove disorganized and noisy data by highlighting the targeted characteristics [69]. Spectral smoothing techniques include Savitzky–Golay smoothing, minimum noise-fraction rotation, moving average smoothing, and others. Data filtering techniques include Gaussian filtering, linear filtering, etc. Image enhancement techniques include homomorphic filtering, histogram equalization, and others.
5.5. Recent Methodologies That Allow Effective Segmentation and Accurate Classification
Segmentation and feature extraction processes are essential for UAV-generated images [19]. These processes organize the data following discriminative information. The commonly applied techniques for segmentation are thresholding, region-based, edge-based, clustering-based, and neural network (NN)-based methods [70]. Gray-level co-occurrence matrix (GLCM), principal component analysis (PCA), discrete wavelet transforms (DWT), and NN-based models used extensively for feature extraction [71]. All these approaches enable classification with accuracy. Technological advancements have developed many classification algorithms and models that categorize diseases efficiently, accurately, and rapidly. ML classifiers are widely applied for the classification of diseases and early detection [72]. These classifiers are rooted in image segmentation and feature extraction. The CNN models are the current approaches for solving the data complexity and removing noisy and disorganized backgrounds in images. The deep convolutional neural network (DCNN) model achieves higher than 90% accuracy and the multilayer convolutional neural network (MCNN) achieves more than 95% accuracy in many kinds of research while classifying healthy and diseased leaves appropriately [73]. Moreover, these can identify multiple diseases. Current studies have employed semi supervised classification methods for creating more diverse images [74]. This reduces the discrepancy in dataset accuracy. An extensive description of recent techniques of segmentation, feature extraction, and classification processes is provided in the next sections.
5.6. Solutions That Address the Application Issues of UAVs
The reasons that hinder the application of UAVs are user-acceptance issues, handling issues, safety issues, privacy issues, security issues, permission issues, the need for huge investments, and other miscellaneous factors [4]. There are numerous solutions to address these application issues. As an example, developments of Android applications provide ease in operating UAVs and ensure safety for farmers [75]. These applications connect with the farmers via a Bluetooth module, which is embedded in the UAVs. Gyro, accelerometer, and magnetometer help in managing the balance, aerial stability, and orientation of UAVs [76]. Intel has developed efficient and low-cost Bluetooth-interfaced UAV structures that avoid collisions and ensure safety from equipment damage [77]. This framework provides wireless communications among all the UAVs and shares data about their current location, direction, altitude, and speed. The Bluetooth technology adaptation is highly beneficial, gives higher efficiency, and is cost-effective. Similarly, smartphones equipped with cameras and GPS sensors are promising tools for farmers [78]. Smartphones, being affordable and easy to use, are a better option to overcome the handling and security issues for farmers. Another solution is the merger of formal techniques with ML techniques that develops dependable learning-enabled systems. This merger provides excellent performance with the assurance of safety and security of systems through a specification language [79]. Moreover, formal methods verify the application of AI techniques [80].
AI manages all the data security issues, especially those that are evoked in transferring data. ANN-based approaches, blockchain, mobile edge computing (MEC), and physically unclonable function (PUF) schemes are the security countermeasures against cyberattacks [81]. These schemes protect the integrity and confidentiality of data. Another study [82] analyzed threats and attacks as the risks of cybersecurity and proposes ML techniques, blockchain, software-defined networks (SDN), and fog computing as countermeasures. Additionally, a combination of the CNN model and the Internet of drones (IoD) is advantageous [83]. This study uses wireless communication technology that develops a more optimized system security for the model and suggests that the clustering algorithm developed on node energy gives the best performance. Another study [84] solves the security and communication issues by designing an authentication protocol over the Fifth Generation (5G) technology. This enhanced protocol provides better security and resists privileged insider attacks, impersonation attacks, drone capture attacks, mutual authentication, user anonymity, perfect forward secrecy, man-in-the-middle attacks, temporary information disclosure attacks, and untrace ability. Furthermore, nations are slowly making transitions from “banning” to “guiding” policies. The management measures also show development from various aspects. The recent efforts of regulatory authorities and local governments serve a pioneering role in composing management regulations for UAVs [85]. Smartphone applications allow paperless work, and communication between farmers, officials, and researchers, and provide the solution to farming issues [86]. This study presents an analysis of the apps developed by Indian governmental institutes. Trending methodologies are developing budget-friendly UAVs and related equipment. UAV imagery provides automatic and rapid analysis of forests and farms that reduces project costs. Instead of employing labor, expensive surveying tools, and heavy machinery, this technology produces data with higher accuracy and less expense. Moreover, UAVs can frequently survey farms for monitoring purposes that provide the current growth and condition of trees and reduces the chances of Scab and other diseases. This also prevents food and economic losses. UAVs are environmentally friendly. Most of the UAVs have electric motors so they use no fossil fuels while some use fewer fossil fuels; in both cases, they produce no or negligible greenhouse gas emissions. Furthermore, UAV imagery improves the environmental conditions that hugely contribute to the sustainable development of agriculture. All these solutions will lead to user-acceptance and extensive application of UAVs. Table 2 highlights the key points of this section.
6. Feature Extraction Techniques in Image Analysis of Rosaceae Fruits
In Scab disease detection using UAVs, feature extraction is considered one of the prime pillars [87]. Essential information and features are predetermined in this phase. These isolated features are combined and optimized to form new feature vectors and then forwarded for the classification process. The extraction techniques improve the accuracy of the classification and allow efficient Scab detection. Moreover, feature extraction secures the spectral information and operates dimension reduction in hyperspectral data images [88]. The processing features are extracted according to the study. A study in [89] used the sped-up robust feature (SURF) technique to extract desired regions of interest from a segmented image of an apple. Three widely focused visual contents: shape, color, and texture, were extracted by various techniques [87]. Binary image algorithms and horizontal and vertical segmentation were applied for shape extraction. The histogram intersection (HI) method, Zernike chromaticity distribution moments, and color histogram are color extraction methods. Similarly, the gray-level co-occurrence matrix (GLCM), edge detection, and texture–law measures are some texture extraction approaches [90].
Certain techniques are used to extract a single feature while some techniques are capable in extracting multiple features [45]. The GLCM approach extracts grayscale global features. Similarly, for color edge detection, binary quaternion-moment-preserving (BQMP) can be applied. BQMP uses a histogram to show regions of an image with certain colors. For size, distance, and location extraction, a spatial gray-level dependence matrix can be employed. Histogram of gradients (HOG) is a fast feature extraction method. ML techniques play a significant role in extracting multiple and deep features [44]. To obtain a deep learning network, CNN architectures are optimal solutions. These models comprise two significant functions, namely convolution and pooling, which detect pattern edges and reduce the image sizes. Classic CNN, InceptionV3, AlexNet, ResNet, and VGG are the commonly applied architectures for visual feature extraction [91]. Table 3 provides an analysis of different studies that employed these techniques for Scab detection in Rosaceae family fruits.
7. Segmentation and Classification of Datasets
7.1. Image Segmentation
After image acquisition, proper analysis of imagery data is essential and uses image segmentation and classification techniques [45]. Image segmentation is the process of splitting a digital image into components that give meaningful data. It is a process of assigning an object class to every single pixel of an image. It provides complete details of all the object classes in an image. Different approaches for segmentation are thresholding, edge-based, region-based, watershed, clustering-based, and neural networks-based methods [101].
7.1.1. Thresholding Segmentation
The segmentation technique that works on the histogram features of an image and helps to segment images containing bright objects or patches is known as thresholding [102]. This technique transforms a colored or grayscale image into a binary (black and white) image that helps in further processes and minimizes difficulties. The thresholding process can be global, local, and dynamic based on gray levels and neighborhood attributes [46]. In disease detection, it proves to be the simplest and ideal for real-time segmentation but can be influenced by noise.
7.1.2. Edge-Based Segmentation
Edge-based segmentation techniques are based on marking discontinuities of numerous factors such as colors, gray levels, and others [103]. These techniques blend detected edges into edge chains for constructing borders or object boundaries. Some operators for edge detection are Sobel, Prewitt, Roberts, and Laplacian, Marr–Hilclrath, and Canny [104]. In Scab detection, these approaches perform segmentation on images that possess better contrast among objects. However, in some cases, these methods give false edges that reduce the detection accuracy.
7.1.3. Region-Based Segmentation
Region-based segmentation techniques group together pixels that possess identical features for producing homogeneous regions in an image [105]. Gray levels of pixels are the widely used criteria for homogeneities. These segmentations are further classified into region mergers, region splits, and splits and mergers [106]. The main advantage of these methods is they can easily define similarity criteria and remain unaffected due to noise.
7.1.4. Watershed Segmentation
Another widely applied region-based method for segmentation is watershed segmentation [107]. The watersheds are the lines that decompose an image by dividing water areas into catchment basins. Moreover, watersheds keep these basins apart and assign every single pixel to a watershed or a region [108]. It gives faster and more accurate segmentation with complete image division but sometimes results in excessive segmentation and is sensitive to noise.
7.1.5. Clustering-Based Segmentation
Clustering-based segmentation uses unsupervised cluster algorithms. Fuzzy C-means and K-means approaches are commonly applied. Fuzzy C-means provide soft and K-means hard segmentation results. The main goal of clustering is to use unlabeled training data for creating decision boundaries [89]. The prime advantages of clustering-based methods are their easy application and disease detection, but they need to define the k-value of the cluster and do not give the optimum answer in a few Scab detection studies.
7.1.6. Neural Networks for Segmentation
Neural network (NN) is a supervised segmentation method [109]. ANN algorithms are widely applied for segmentation purposes both in unsupervised and supervised modes. ANN-based models contain an enormous number of processing elements that are interconnected and work together for solving specific issues. These models can learn adaptively, possess self-organizing capabilities, and solve complex problems. However, these models need to train before segmentation application and require more time for it.
7.1.7. Analysis of Various Segmentation Approaches for Scab Detection
Table 4 represents an evaluation of image segmentation techniques for detecting Scab disease in Rosaceae fruits by various researchers. We collected the segmentation methods that have been used from 2019 to 2022. This literature review comprises some traditional segmentation methods and the widely used NN-based methods in recent times. The traditional methods effectively extract the appropriate data and objects from the background, whereas NN-based models perform binary and multiclass segmentation tasks successfully, identify minor spots effectively, predict disease with higher accuracy and provide robust results on validation datasets.
7.2. Image Classification
The process to identify and mark vectors or pixel groups in an image following distinct criteria is called classification [123]. Classification law depends upon the usage of single or multiple spectral bands features, for example, color, shape, texture, etc. Figure 3 shows an evaluation for the segmentation of interested regions and classification of diseases in peaches using mask R-CNN [35]. The categorization of classifiers is based on various rules such as parametric and nonparametric, object-based, and pixel-based. Supervised and unsupervised methods are the two broad assortments of these classifiers [124].
7.2.1. Unsupervised Classification Method:
Unsupervised classification is a fully automated approach that does not require training samples by its user [125]. The user selects the algorithm for the software and designates the number of output classes for image classification. The software groups the pixels based on the feature similarity into classes in a systematic way. It employs pattern recognition or clustering. The commonly applied unsupervised classifiers are K-means clustering, iterative self-organizing data analysis techniques (ISODATA), hierarchical clustering, self-organizing map (SOM), etc.
- K-Means Clustering: K-means clustering is one of the simple and widely applied clustering algorithms for classification [126]. In K-means clustering, a dataset is split into several clusters. Among all the clusters, a minimum of one component must possess the image of the principal space of the diseased component [127]. The major drawback is the users are restricted to defining the number of clusters for image classification of diseased fruits.
- Iterative Self-Organizing Data Analysis Techniques (ISODATA): ISODATA is another category of unsupervised classifiers [128]. Two parameters strongly influence the classification results. These parameters are the distance threshold that is required for cluster union and the typical deviation threshold that is required for cluster deviation. ISODATA allows good classification in Scab detection and visual interpretation of feature differences in images but shows rare missing point errors.
- Hierarchical Clustering: Another simple unsupervised classifier like K-means is hierarchical clustering. The only difference is that the number of clusters is not fixed and changes in all the iterations. This is further categorized into agglomerative clustering and divisive clustering [129]. The prime reasons for using this clustering in disease detection are its easy implementation and no requirement for advanced specification of the number of clusters. However, it experiences slow classification and does not classify well in images having outliers and noise.
7.2.2. Supervised Classification Method
Supervised classification allows the user to choose a set of sample pixels, representing classes, in an image and instructs the software to utilize them as references for other pixel classifications within that image [130]. The user designates which similar spectral features are essential for grouping input data and assigns the number of classes for image classification. The widely used supervised classifiers are k-nearest neighbor (KNN), support vector machine (SVM), logistic regression, naïve Bayes, random forest (RF), and deep learning (DL) models [131]. All these classifiers achieve high accuracy. Some are discussed below:
- K-Nearest Neighbor (KNN): The simplest among all supervised classification methods is the k-nearest neighbor rule [132]. It requires selecting k, the number of neighbors essential for classification. The KNN classifier is not commonly used alone because it requires associated visualization; however, it may be applied as a baseline classifier for comparison with other classifiers [133]. The main advantage is it is simple and easily applicable for small datasets and uses less time for training but shows higher computational complexity.
- Support Vector Machine (SVM): SVM selects extreme points for producing a hyperplane [134]. A hyperplane is the best decision boundary that causes n-dimensional space segregation into appropriate classes. Earlier SVM was applicable for binary classification only, but now it is modified to perform multiclass classification [135]. The other key advantages of SVM are that it is robust, provides simple geometric interpretations, and shows low computational cost. Some drawbacks are the need for large support vectors and slow training.
- Logistic Regression: Despite its name, logistic regression is a powerful supervised classifier instead of a regression model [136]. It applied for predictive analysis. It is developed on probability notion and sigmoid function. This classifier is applicable for linear and binary classification [36]. It is a simple, easy-to-realize, and a more efficient classification method for disease detection in plants. Nevertheless, it is restricted to giving only linear solutions and requires the compilation of data assumptions.
- Naïve Bayes: A probabilistic classifier formed on the Bayes theorem is called naïve Bayes [137]. It assumes that all the features being independent have no interactions among them. Being simple in application and fast in computation, it gives better performance for large datasets [138]. Therefore, it can be used for real-time applications also. However, in some cases classification accuracy is reduced due to class conditional independence.
- Random Forest (RF): Another supervised classifier is random forest, which classifies large data accurately [139]. It uses an ensemble apprenticeship approach for training and sums up the prediction results of individual trees. Unlike other decision tree algorithms, RF does not utilize profit knowledge [140]. It acts as a tree predictor and so helps in assorting trees randomly in forests. In image classification of diseased plants, RF handles large databases efficiently and estimates significant variables. However, it results in excessive fitting in some cases due to noise.
- Deep Learning (DL): The subset of machine learning (ML), in which a computer model imitates human biological learning, is called deep learning (DL) [141]. It contains multiple processing layers such as ANNs rather than classical neural networks. It includes all the steps, data acquisition, classification, and results evaluation. The most applied neural network (NN) is an artificial neural network (ANN) [142]. It is an image-learning and classification tool. NN models perform activities identical to human brains. While knowing previous data, these models are trained to work on related data. Convolutional neural networks (CNNs), recurrent neural networks (RNNs), and generative adversarial networks (GANs) are some commonly applied ANN models [143]. These models need fewer formal statistics, efficiently manage noisy data, and give higher accuracy in Scab detection, but tend toward excessive fitting due to many layers and huge computations.
7.3. Analysis of Various Classification Approaches
This section provides a comprehensive analysis of various classification algorithms and models used by numerous researchers for Scab detection in Rosaceae fruits. The models are developed with deep, complex, and high parameters to achieve high accuracy with a limitation of complex computation. VGGNet, InceptionV3, AlexNet, GoogLeNet, and XceptionNet are widely used DL models [144]. Some models are developed to achieve computation efficiency with a restriction of adequate accuracy. These models work efficiently on mobiles like ResNet. [145] applied several ML and DL methods for disease detection and the result showed that VGG16 achieved the highest classification accuracy. This evaluated that the number of layers in the NN model indicates the network complexity and too many layers may affect the results. Table 5 provides a detailed analysis of the classification used by scholars for image analysis.
8. Utilization of UAV in Scab Detection
UAVs are categorized into fixed-wing UAVs, rotary-wing UAVs, and vertical takeoff and landing (VTOL) according to their flight platforms [159]. The payload is designed according to the task requirement and better functions are achieved with the sacrifice of certain performances. UAVs have many benefits with a few limitations. Owing to this reason, UAVs of different platforms and payloads are employed for different purposes. Some imaging sensors that are essential for UAVs in plant monitoring and Scab detection are explained below.
Imaging Sensors Required for UAV Monitoring
Whenever we focus on applications of UAVs in any field, one of the foremost factors that we consider is the kind and quality of the sensor for aerial imaging. The nature of research, the type of sensor, and the required image quality decide the selection of a UAV platform. These imaging sensors work on the conversion principle of light rays into electrical signals. The widely applied sensors for acquiring images in agriculture are RGB, near-infrared (NIR), multispectral, hyperspectral, thermal, and depth sensors. The optical features of sensors along with electromagnetic ranges are important factors for detecting plant diseases [141].
- RGB (Red–Green–Blue) Sensors: RGB spectral sensors are the visible light sources that are commonly used. These sensors measure only the intensities of three colors and evaluate each in every pixel. The naked eye is sensitive to three color bands: red, blue, and green; therefore, the RGB sensor gives images that can be easily recognized by humans. These sensors are utilized with other sensors to improve their accuracy. If a red filter replaces a NIR filter, then it is named modified RGB. These sensors are the least expensive and are easily available but give low spectral resolution images. These capture images with high spatial resolution and allow finer spatial details. These can formulate 3D models of plants and can be used for plant inspection in harsh weather. Moreover, RGB images give details on LAB where L stands for lightness and AB are dimensions of the color opponent, YCBCR where Y stands for the luma component, CB and CR are the blue difference and red difference, Hue, Saturation, and Value (HSV), and others [160]. These help in identifying diseases in plant leaves and fruits. However, their spectral range varies from 380 to 750 nm only, and this range cannot be used to identify diseases appropriately.
- Multispectral Sensors: Multispectral sensors are capable in capturing images having exceptional spatial resolution and determine reflectance in the infrared (IR) bands. These sensors use various spectral bands such as red, blue, green, NIR, and red-edge. Multiple bands in these sensors give high accuracy. These are classified into two groups according to bandwidth: broadband sensors and narrowband sensors. These allow appropriate analytics for agriculture; therefore, these are highly crucial for researchers and farmers. Multispectral together with NIR sensors form vegetable indices (VI) that rely either on NIR or other light bands [161]. For automatic disease detection, multispectral sensors capture images in both regions, namely visible and NIR. The absence of multispectral data would hinder early disease detection, pests and weed detection, and vegetation biomass calculation of plants. The drawbacks of these sensors are high cost and enhanced calibration efforts for certain tasks [53].
- Hyperspectral Sensors: The extremely capable hyperspectral images can capture images in spatial and spectral ranges. These sensors collect light with multiple narrow-size bands for every single pixel in the captured image. Furthermore, these sensors have area detectors for quantifying the captured light that resulted from the incident photon conversion into electrons [77]. This conversion is obtained through two sensors, namely, charge-coupled-device (CCD) sensors along with complementary metal-oxide–semiconductor (CMOS) sensors. These sensors are used for minimizing the shortcomings of multispectral sensors, for capturing information in lesser spectral differences, and for detecting and discriminating against target objects. The commercial success of these sensors in UAVs to measure a hundred bands and perform data processing is guaranteed. The prime advantage of these sensors in agriculture is that they can detect plant stress with the disease or pathogen responsible for it. Major limitations include higher costs and huge unnecessary data if not properly calibrated [162].
- Thermal Sensors: Thermal sensors capture the thermal energy of an object through optical lenses and IR sensors fit in thermal sensors, which data are then used to generate images with the information collected. These sensors detect the radiation related to their wavelengths and generate heat while converting these radiations into grayscale images. Furthermore, they can generate colored images with yellow representing warmer images and blue representing cooler images [163]. Their costs are relatively low and RGB sensors with a few modifications can be converted into thermal sensors. These sensors are widely used for agricultural tasks such as disease detection, irrigation management, mapping, and monitoring. These sensors generate images with comparatively low resolution and huge data, which is their major drawback [123].
- Depth Sensors: Depth sensors allow an extra depth of features in RGB pixels. The depth is the distance between an object and the depth sensor when the image is captured. These are widely equipped on UAVs for agricultural purposes and are used to enhance the accuracy of other sensors. LiDAR, red–green–blue–depth (RGB-D), and time of flight (ToF) are some depth sensors. Light detection and ranging (LiDAR) is considered the most prevalent depth sensor. The prime difference between LiDAR and RGB-D is that LiDAR implies laser pulses for distance calculation whereas RGB-D is dependent on the light reflection intensities [164]. Therefore, LiDAR is used more than RGB-D for 3D modeling, disease detection, phenotyping, etc. The major drawback is that sometimes these sensors provide lower intensity counts as these cannot detect objects after a specific distance.
We list the 2017–2022 studies in Table 6. This table illustrates different imaging sensors and UAV types, and their achieved benefits for detecting Scab in Rosaceae fruits and other fruits. Some prime advantages of using UAVs equipped with sensors are accurate and precise results in Scab detection, early detection, and monitoring of health and growth in plants. These advanced technologies not only save crops and time but also enhance production.
9. Discussion and Conclusions
9.1. Discussion
This manuscript discusses UAV imagery for image acquisition and various AI techniques for image processing for Scab detection in Rosaceae family fruits. Challenges in Scab detection and the recent methodologies to address them are evaluated. Miniature and high-resolution sensors with flexible UAV platforms, IoT-based data storage, solar technology for batteries, and DL approaches proved to be the best solutions to cope with the stated challenges. Employing NN-based models for color, shape, and texture extraction separates the infected areas, improves the noise robustness and visualization, and enhances the classification accuracy. Reviewing all the segmentation methods, CNN-based models, especially Mask R-CNN, SegNet, and UNet, perform binary and multiclass segmentation tasks successfully, detect accurate pixel boundaries and minor spots, separate the potentially Scab-diseased areas, and enhance the identification accuracy. Similarly, the supervised classification methods categorize the healthy and the diseased leaves in their respective classes appropriately. Among them, CNN-based architectures, namely classic CNN, VGG, MobileNetV2, and InceptionV3, outperform other ML and CNN models by restricting operation, complexity, size, and other parameters, allowing quick convolution and detecting Scab with higher accuracy, precision, and G-measure. Being fast and efficient, UAVs show outstanding application prospects in image acquisition of Rosaceae fruits among other devices. A comparative study of various research shows rotary-wing UAVs are extensively used for Scab detection; therefore, they are better adapted for use in agricultural fields. Different sensors are observed to be utilized, but all these sensors have many benefits along with restrictions. Depth sensors are not observed to be commonly exploited because of their expense. Sections of segmentation, classification, and sensors have relevant conclusions; thus, it is evident that the fusion of AI with UAV imagery has the potential to close the gap between recent trends and disease detection.
9.2. Conclusions
Scab disease in fruits causes food insecurity and economic loss. However, Scab detection is still challenging among researchers and farmers. This manuscript gives preliminary insight into the selection of state-of-the-art UAV-based and AI-based techniques for Scab detection in Rosaceae family fruits. This paper presents challenging issues associated with Scab detection via UAV imagery and current methodologies that resolve these challenges. From the perspective of an organized framework, it categorizes all of the current methodologies into three sections, namely feature extraction, segmentation and classification, and UAV imagery. Additionally, an extensive literature review is given in all these sections along with the significance and limitations of each study. In the end, this paper describes some challenges that still require further integration efforts to optimize UAV applications for Scab detection. This will help UAV imagery to reach milestones in disease detection and economic stability.
10. Challenges with Future Prospects
With technological advancement, certain challenges still require modifications. In this section, we highlight some issues and opportunities of current approaches that need consideration in the future. Automation aspects from image acquisition to data processing, interpretation, and disease detection will enhance the utility of technology. Proper detection of diseases with minimal error will be possible with better images generated by lightweight UAVs and high-resolution sensors. Such UAV systems are required that can serve as rotary-wing and fixed-wing UAVs simultaneously according to the requirement. Enhanced flight duration and reduced costs still require solutions for efficiently assessing the overall plant status at larger farms and in forests. This will be possible with energy-efficient and wireless charging systems. Platforms must be capable to alter their speed and altitude to manage climatic conditions. Additionally, 3D flight paths will be a better option to address the inconsistency in sampling distance from the ground.
Multiple sensors interfaced on combined platforms will be capable to reduce payload and measure a variety of physiological parameters. The selection of sensors and their spectral range is aided by the nature of the disease. The wider the spectral ranges, the better will be the differentiation of disease symptoms. The image suffers from reflections and shadows if they are captured during daylight. Illumination backscatter X-ray imaging needs to be controlled. The low resolution of sensors reflects thermal radiation, which requires careful calibration of sensors. Accurate thermography will assist thermal sensors in measuring real and accurate temperatures. Furthermore, huge and complex data generated by UAVs still require advanced data analysis software. The advanced coding and data training, and maintenance of this software must be considered in the future. Moreover, ML algorithms give more accurate results for larger datasets, but overcoming the insufficiency of larger training and validation datasets needs to be developed. All of these expansions will make these technologies user-friendly and highly and universally adaptable for disease detection.
Author Contributions
Conceptualization, Z.A.A.; methodology, A.I.; software, Z.A.A.; validation, C.Y.; investigation, A.I.; data curation, Q.Z.; writing—original draft preparation, A.I. and C.Y.; writing—review and editing, Z.A.A., C.Y. and A.I.; supervision, Z.A.A.; project administration, Z.A.A.; funding acquisition, Z.A.A. All authors have read and agreed to the published version of the manuscript.
Funding
The above research is supported by Guangdong Basic and Applied Basic Research Foundation No. 2022A1515011345 and Science Platform, Projects for Universities of Guangdong Province No. 2021KTSCX124 and 2022 Meizhou City Social Development Science and Technology Planning Project No.2022B110.
Data Availability Statement
All data are available in the article.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
| Acronyms | Definitions |
| 3D | 3-Dimensional |
| 5G | Fifth Generation |
| AI | Artificial Intelligence |
| ANN | Artificial Neural Network |
| BLDC | Brushless Direct Current Motor |
| BLOB | Binary, Large Object |
| BQMP | Binary Quaternion-Moment-Preserving |
| CCD | Charge-Coupled Device |
| CFS | Correlation-based Feature Selection |
| CMOS | Complementary Metal-Oxide–Semiconductor |
| CNNs | Convolutional Neural Networks |
| COVID-19 | Coronavirus Disease 2019 |
| DCGAN | Deep Convolutional Generative Adversarial Networks |
| DCNN | Deep Convolutional Neural Network |
| DL | Deep Learning |
| DNN | Deep Neural Network |
| DT | Decision Tree |
| DWT | Discrete Wavelet Transform |
| ESC | Electronic Speed Controller |
| Faster-RCNN | Faster-Region Based Convolutional Neural Network |
| FCN | Fully Convolutional Networks |
| FCNN-LDA | Faster Convolutional Neural Network–Linear Discriminant Analysis |
| FPV | First-Person View |
| GA | Genetic Algorithm |
| GANs | Generative Adversarial Networks |
| GCS | Ground Control Station |
| GLCM | Gray-Level Co-occurrence Matrix |
| GPS | Global Positioning System |
| HI | Histogram Intersection |
| HOG | Histogram of Gradients |
| HSI | Hue, Saturation and Intensity |
| HSV | Hue, Saturation, and Value |
| iCNN | Improved Convolutional Neural Network |
| IoD | Internet of Drones |
| IoT | Internet of Things |
| IP | Internet Protocol |
| IPELM | Linear Particle Swarm Optimized Extreme Learning Machine |
| IR | Infrared |
| iResNet | Improved ResNet |
| ISODATA | Iterative Self-Organizing Data Analysis Techniques |
| Kg | Kilogram |
| KNN | K Nearest Neighbors |
| LDA | Linear Discriminant Analysis |
| LDI | Leaf Development Index |
| LiDAR | Light Detection and Ranging |
| Mask R-CNN | Mask Region-Based Convolutional Neural Network |
| MCNN | Multilayer Convolutional Neural Network |
| MEC | Mobile Edge Computing |
| Min | Minutes |
| MKSVM | Multiple Kernel Support Vector Regression |
| ML | Machine Learning |
| NIR | Near-Infrared |
| nm | Nanometer |
| NN | Neural Network |
| OP | Oblique Photogrammetry |
| PCA | Principal Component Analysis |
| PCNN | Parallel Convolution Neural Network |
| PLS-DA | Partial Least-Squares Discriminant Analysis |
| PUF | Physically Unclonable Function |
| RF | Random Forest |
| RGB | Red–Green–Blue |
| RGB-D | Red–Green–Blue–Depth |
| RNNs | Recurrent Neural Networks |
| RPN | Regional Proposal Network |
| Sec | Seconds |
| SGDM | Spatial Gray-Level Dependence Matrices |
| SLAM | Simultaneous Localization and Mapping |
| SOM | Self-Organizing Map |
| SURF | Sped-Up Robust Feature |
| SVM | Support Vector Machine |
| ToF | Time of Flight |
| UAS | Unmanned Aerial System |
| UAV | Unmanned Aerial Vehicle |
| UGVs | Unmanned Ground Vehicles |
| US | United States |
| VI | Vegetable Indices |
| YOLOv4 | You Only Look Once v4 |
| VTOL | Vertical Takeoff and Landing |
References
- Doerr, A.O. Sensors and Biosensors for Pathogen and Pest Detection in Agricultural Systems: Recent Trends and Oportunities. Master’s Thesis, Universidade Federal do Rio Grande do Sul, Porto Alegre, Brazil, 2018. [Google Scholar]
- Wani, J.A.; Sharma, S.; Muzamil, M.; Ahmed, S.; Sharma, S.; Singh, S. Machine learning and deep learning based computational techniques in automatic agricultural diseases detection: Methodologies, applications, and challenges. Arch. Computat. Methods Eng. 2022, 29, 641–677. [Google Scholar] [CrossRef]
- Nabi, F.; Jamwal, S.; Padmanbh, K. Wireless sensor network in precision farming for forecasting and monitoring of apple disease: A survey. Int. J. Inf. Technol. 2020, 14, 769–780. [Google Scholar] [CrossRef]
- Jha, K.; Doshi, A.; Patel, P.; Shah, M. A comprehensive review on automation in agriculture using artificial intelligence. Artif. Intell. Agric. 2019, 2, 1–12. [Google Scholar] [CrossRef]
- Kumar, M.; Pal, Y.; Gangadharan, S.M.P.; Chakraborty, K.; Yadav, C.S.; Kumar, H.; Tiwari, B. Apple Sweetness Measurement and Fruit Disease Prediction Using Image Processing Techniques Based on Human-Computer Interaction for Industry 4.0. Wirel. Commun. Mob. Comput. 2022, 2022, 5760595. [Google Scholar] [CrossRef]
- Spadaro, D.; Torres, R.; Errampalli, D.; Everett, K.; Ramos, L.; Mari, M. Pome fruits. In Postharvest Pathology of Fresh Horticultural Produce; CRC Press: Boca Raton, FL, USA, 2019; pp. 55–110. [Google Scholar]
- Orchi, H.; Sadik, M.; Khaldoun, M. On Using Artificial Intelligence and the Internet of Things for Crop Disease Detection: A Contemporary Survey. Agriculture 2021, 12, 9. [Google Scholar] [CrossRef]
- Zhang, J.; Huang, Y.; Pu, R.; Gonzalez-Moreno, P.; Yuan, L.; Wu, K.; Huang, W. Mon-itoring plant diseases and pests through remote sensing technology: A review. Comput. Electron. Agric. 2019, 165, 104943. [Google Scholar] [CrossRef]
- Nambi, E.; Walsh, O.S.; Ansah, E.O.; Lamichhane, R. Drones for Fruit Producers. Crop. Soils 2022, 55, 16–23. [Google Scholar] [CrossRef]
- Kaivosoja, J.; Hautsalo, J.; Heikkinen, J.; Hiltunen, L.; Ruuttunen, P.; Näsi, R.; Niemeläinen, O.; Lemsalu, M.; Honkavaara, E.; Salonen, J. Reference measurements in developing UAV Systems for detecting pests, weeds, and diseases. Remote Sens. 2021, 13, 1238. [Google Scholar] [CrossRef]
- Rehman, A.; Saba, T.; Kashif, M.; Fati, S.M.; Bahaj, S.A.; Chaudhry, H. A Revisit of Internet of Things Technologies for Monitoring and Control Strategies in Smart Agriculture. Agronomy 2022, 12, 127. [Google Scholar] [CrossRef]
- Wan, L.; Li, H.; Li, C.; Wang, A.; Yang, Y.; Wang, P. Hyperspectral Sensing of Plant Diseases: Principle and Methods. Agronomy 2022, 12, 1451. [Google Scholar] [CrossRef]
- Sood, S.; Singh, H. Computer Vision and Machine Learning based approaches for Food Security: A Review. Multimed. Tools Appl. 2021, 80, 27973–27999. [Google Scholar] [CrossRef]
- Radovanovic, D.; Dukanovic, S. Image-Based Plant Disease Detection: A Comparison of Deep Learning and Classical Machine Learning Algorithms. In Proceedings of the 2020 24th International Conference on Information Technology (IT), Zabljak, Montenegro, 18–22 February 2020; pp. 1–4. [Google Scholar] [CrossRef]
- Li, L.; Zhang, S.; Wang, B. Plant Disease Detection and Classification by Deep Learning—A Review. IEEE Access 2021, 9, 56683–56698. [Google Scholar] [CrossRef]
- Liu, J.; Xiang, J.; Jin, Y.; Liu, R.; Yan, J.; Wang, L. Boost Precision Agriculture with Unmanned Aerial Vehicle Remote Sensing and Edge Intelligence: A Survey. Remote Sens. 2021, 13, 4387. [Google Scholar] [CrossRef]
- Aslan, M.F.; Durdu, A.; Sabanci, K.; Ropelewska, E.; Gültekin, S.S. A Comprehensive Survey of the Recent Studies with UAV for Precision Agriculture in Open Fields and Greenhouses. Appl. Sci. 2022, 12, 1047. [Google Scholar] [CrossRef]
- Thalluri, L.N.; Adapa, S.D.; Priyanka, D.; Sarma, A.V.N.; Venkat, S.N. Drone Technology Enabled Leaf Disease Detection and Analysis system for Agriculture Applications. In Proceedings of the 2021 2nd International Conference on Smart Electronics and Communication (ICOSEC), Trichy, India, 7–9 October 2021; pp. 1079–1085. [Google Scholar] [CrossRef]
- Verma, N.V.; Shukla, M.; Kulkarni, R.; Srivastava, K.; Claudic, B.; Savara, J.; Mathew, M.J.; Maurya, R.; Bhattacharjee, G.; Singh, V.; et al. Emerging Extraction and Diagnostic Tools for Detection of Plant Pathogens: Recent Trends, Challenges, and Future Scope. ACS Agric. Sci. Technol. 2022, 2, 858–881. [Google Scholar] [CrossRef]
- Shaikh, T.A.; Mir, W.A.; Rasool, T.; Sofi, S. Machine Learning for Smart Agriculture and Precision Farming: Towards Making the Fields Talk. Arch. Comput. Methods Eng. 2022, 29, 4557–4597. [Google Scholar] [CrossRef]
- Mahmud, S.; Zahid, A.; He, L.; Martin, P. Opportunities and Possibilities of Developing an Advanced Precision Spraying System for Tree Fruits. Sensors 2021, 21, 3262. [Google Scholar] [CrossRef]
- Vaidya, R.; Nalavade, D.; Kale, K.V. Hyperspectral Imagery for Crop yield estimation in Precision Agriculture using Machine Learning Approaches: A review. Int. J. Creat. Res. Thoughts IJCRT 2021, 9, a777–a789, ISSN: 2320-2882. [Google Scholar]
- Bosch, S.; Wintjens, D.S.; Wicaksono, A.; Kuijvenhoven, J.; van der Hulst, R.; Stokkers, P.; Daulton, E.; Pierik, M.J.; Covington, J.A.; de Meij, T.G.; et al. The faecal scent of inflammatory bowel disease: Detection and monitoring based on volatile organic compound analysis. Dig. Liver Dis. 2020, 52, 745–752. [Google Scholar] [CrossRef]
- Eduardo, C.-V.; Hugo, R.-T.; Otilio-Arturo, A.-S.; Alfredo, T.-P.; Mireya, C.-M. Use of unmanned aerial vehicles (UAV) as an innovation in agriculture. Afr. J. Agric. Res. 2020, 16, 1665–1673. [Google Scholar] [CrossRef]
- Qureshi, T.; Saeed, M.; Ahsan, K.; Malik, A.A.; Muhammad, E.S.; Touheed, N. Smart Agriculture for Sustainable Food Security Using Internet of Things (IoT). Wirel. Commun. Mob. Comput. 2022, 2022, 9608394. [Google Scholar] [CrossRef]
- de Castro Megías, A.I.; Pérez-Roncal, C.; Thomasson, J.A.; Ehsani, R.; López-Maestresalas, A.; Yang, C.; Jarén, C.; Wang, T.; Cribben, C.; Marin, D.; et al. Applications of Sensing for Disease Detection. In Sensing Approaches for Precision Agriculture; Springer: Cham, Switzerland, 2021; pp. 369–398. [Google Scholar]
- Kavitha, S.; Sarojini, K. A Review on Fruit Disease Detection and Classification using Computer Vision Based Approaches. Int. J. Innov. Sci. Res. Technol. 2022, 7, 1393–1400. [Google Scholar]
- Stella, A.; Caliendo, G.; Melgani, F.; Goller, R.; Barazzuol, M.; La Porta, N. Leaf Wetness Evaluation Using Artificial Neural Network for Improving Apple Scab Fight. Environments 2017, 4, 42. [Google Scholar] [CrossRef] [Green Version]
- Akhter, R.; Sofi, S.A. Precision agriculture using IoT data analytics and machine learning. J. King Saud Univ. Comput. Informat. Sci. 2022, 34, 5602–5618. [Google Scholar] [CrossRef]
- Huang, Y.; Ren, Z.; Li, D.; Liu, X. Phenotypic techniques and applications in fruit trees: A review. Plant Methods 2020, 16, 107. [Google Scholar] [CrossRef]
- Singh, K.; Kumar, J. Current Status of Apple Scab Disease and Management Strategies in Uttaranchal Himalayas. In Diseases of Horticultural Crops; Apple Academic Press: Palm Bay, FL, USA, 2022; pp. 1–29. [Google Scholar] [CrossRef]
- Thakur, P.S.; Khanna, P.; Sheorey, T.; Ojha, A. Trends in vision-based machine learning techniques for plant disease identification: A systematic review. Expert Syst. Appl. 2022, 208, 118117. [Google Scholar] [CrossRef]
- Bleasdale, A.J.; Blackburn, G.; Whyatt, J.D. Feasibility of detecting apple scab infections using low-cost sensors and interpreting radiation interactions with scab lesions. Int. J. Remote Sens. 2022, 43, 4984–5005. [Google Scholar] [CrossRef]
- Thangaraj, R.; Dinesh, D.; Hariharan, S.; Rajendar, S.; Gokul, D.; Hariskarthi, T.R. Automatic Recognition of Avocado Fruit Diseases using Modified Deep Convolutional Neural Network. Int. J. Grid Distrib. Comput. 2020, 13, 1550–1559. [Google Scholar]
- Alosaimi, W.; Alyami, H.; Uddin, M.I. PeachNet: Peach Diseases Detection for Automatic Harvesting. Comput. Mater. Contin. 2021, 67, 1665–1677. [Google Scholar] [CrossRef]
- Roy, A.M.; Bhaduri, J. A Deep Learning Enabled Multi-Class Plant Disease Detection Model Based on Computer Vision. AI 2021, 2, 413–428. [Google Scholar] [CrossRef]
- Thapa, R.; Zhang, K.; Snavely, N.; Belongie, S.; Khan, A. The Plant Pathology Challenge 2020 data set to classify foliar disease of apples. Appl. Plant Sci. 2020, 8, e11390. [Google Scholar] [CrossRef] [PubMed]
- Israr, A.; Ali, Z.A.; Alkhammash, E.H.; Jussila, J.J. Optimization Methods Applied to Motion Planning of Unmanned Aerial Vehicles: A Review. Drones 2022, 6, 126. [Google Scholar] [CrossRef]
- Tiidus, T.S. The Feasibility, Practicality and Uses of Detecting Crop Water Stress in Southern Ontario Apple Orchards with a UAS. Master’s Thesis, Wilfrid Laurier University, Waterloo, ON, Canada, 2016. [Google Scholar]
- Khan, F.A.; Ibrahim, A.A.; Zeki, A.M. Environmental monitoring and disease detection of plants in smart greenhouse using internet of things. J. Phys. Commun. 2020, 4, 055008. [Google Scholar] [CrossRef]
- Stefas, N.; Bayram, H.; Isler, V. Vision-based monitoring of orchards with UAVs. Comput. Electron. Agric. 2019, 163, 104814. [Google Scholar] [CrossRef]
- Ouhami, M.; Hafiane, A.; Es-Saady, Y.; El Hajji, M.; Canals, R. Computer Vision, IoT and Data Fusion for Crop Disease Detection Using Machine Learning: A Survey and Ongoing Research. Remote Sens. 2021, 13, 2486. [Google Scholar] [CrossRef]
- Ahsan, T.; Khan, M.; Ahmed, M.; Zafar, T.; Javeed, A. Applications of Artificial Intelligence in Crop Disease Diagnose and Management. Int. J. Sci. Eng. Res. 2022, 13, 1000–1015. [Google Scholar]
- Zheng, C.; Abd-Elrahman, A.; Whitaker, V. Remote sensing and machine learning in crop phenotyping and management, with an emphasis on applications in strawberry farming. Remote Sens. 2021, 13, 531. [Google Scholar] [CrossRef]
- Kodors, S.; Lacis, G.; Sokolova, O.; Zhukovs, V.; Apeinans, I.; Bartulsons, T. Apple scab detection using CNN and Transfer Learning. Agron. Res. 2021, 19, 507–519. [Google Scholar]
- Mavridou, E.; Vrochidou, E.; Papakostas, G.A.; Pachidis, T.; Kaburlasos, V.G. Machine Vision Systems in Precision Agriculture for Crop Farming. J. Imaging 2019, 5, 89. [Google Scholar] [CrossRef] [Green Version]
- Zhang, W.; Zhou, G.; Chen, A.; Hu, Y. Deep multi-scale dual-channel convolutional neural network for Internet of Things apple disease detection. Comput. Electron. Agric. 2022, 194, 106749. [Google Scholar] [CrossRef]
- Ushadevi, G. A survey on plant disease prediction using machine learning and deep learning techniques. Intel. Artif. 2020, 23, 136–154. [Google Scholar]
- Shoufan, A.; AlNoon, H.; Baek, J. Secure communication in civil drones. In International Conference on Information Systems Security and Privacy; Springer: Cham, Switzerland, 2015; pp. 177–195. [Google Scholar]
- Shin, J. Supervised Machine/Deep Learning Techniques—A Case Study of Powdery Mildew Detection on the Strawberry Leaf. Master’s Thesis, Dalhousie University, Halifax, NS, Canada, 2020. [Google Scholar]
- Pandey, K.; Chudasama, D. Hybrid Authentication Scheme Based on Cyber-Physical System use in Agriculture. J. Artif. Intell. Res. Adv. 2022, 9, 24–35. [Google Scholar]
- Khan, A.; Gupta, S.; Gupta, S.K. Multi-hazard disaster studies: Monitoring, detection, recovery, and management, based on emerging technologies and optimal techniques. Int. J. Disast. Risk Reduct. 2020, 47, 101642. [Google Scholar] [CrossRef]
- Delavarpour, N.; Koparan, C.; Nowatzki, J.; Bajwa, S.; Sun, X. A Technical Study on UAV Characteristics for Precision Agriculture Applications and Associated Practical Challenges. Remote Sens. 2021, 13, 1204. [Google Scholar] [CrossRef]
- Maurya, N.K.; Tripathi, A.K.; Chauhan, A.; Pandey, P.C.; Lamine, S. Recent Advancement and Role of Drones in Forest Monitoring: Research and Practices. In Advances in Remote Sensing for Forest Monitoring; Wiley: Hoboken, NJ, USA, 2022; pp. 221–254. [Google Scholar]
- Krichen, M. Anomalies Detection Through Smartphone Sensors: A Review. IEEE Sens. J. 2021, 21, 7207–7217. [Google Scholar] [CrossRef]
- Joseph, D.S.; Pawar, P.M.; Pramanik, R. Intelligent plant disease diagnosis using convolutional neural network: A review. Multimed. Tools Appl. 2022, 1–67. [Google Scholar] [CrossRef]
- Tsouros, D.C.; Bibi, S.; Sarigiannidis, P.G. A review on UAV-based applications for precision agriculture. Information 2019, 10, 349. [Google Scholar] [CrossRef] [Green Version]
- Subeesh, A.; Mehta, C.R. Automation and digitization of agriculture using artificial intelligence and internet of things. Artif. Intell. Agric. 2021, 5, 278–291. [Google Scholar] [CrossRef]
- Hrovatin, D.; Žemva, A. Exploiting Solar Energy during an Aerial Mapping Mission on a Lightweight UAV. Electronics 2021, 10, 2876. [Google Scholar] [CrossRef]
- Boursianis, A.D.; Papadopoulou, M.S.; Diamantoulakis, P.; Liopa-Tsakalidi, A.; Barouchas, P.; Salahas, G.; Karagiannidis, G.; Wan, S.; Goudos, S.K. Internet of Things (IoT) and Agricultural Unmanned Aerial Vehicles (UAVs) in smart farming: A comprehensive review. Internet Things 2022, 18, 100187. [Google Scholar] [CrossRef]
- Buja, I.; Sabella, E.; Monteduro, A.; Chiriacò, M.; De Bellis, L.; Luvisi, A.; Maruccio, G. Advances in Plant Disease Detection and Monitoring: From Traditional Assays to In-Field Diagnostics. Sensors 2021, 21, 2129. [Google Scholar] [CrossRef] [PubMed]
- Diez, Y.; Kentsch, S.; Fukuda, M.; Caceres, M.; Moritake, K.; Cabezas, M. Deep Learning in Forestry Using UAV-Acquired RGB Data: A Practical Review. Remote Sens. 2021, 13, 2837. [Google Scholar] [CrossRef]
- Rai, A.; Prakash, O.M. Application of Machine Learning in Agriculture with Some Examples. In Artificial Intelligence; Chapman and Hall/CRC: Boca Raton, FL, USA; pp. 139–163.
- Qazi, S.; Khawaja, B.A.; Farooq, Q.U. IoT-equipped and AI-enabled next generation smart agriculture: A critical review, current challenges and future trends. IEEE Access 2022, 10, 21219–21235. [Google Scholar] [CrossRef]
- Singh, V.; Sharma, N.; Singh, S. A review of imaging techniques for plant disease detection. Artif. Intell. Agric. 2020, 4, 229–242. [Google Scholar] [CrossRef]
- Yang, H.; Bian, H.; Li, B.; Bi, W.; Zhao, X. A Low-Cost and Ultralight Unmanned Aerial Vehicle-Borne Multicamera Imaging System Based on Smartphones. Math. Probl. Eng. 2022, 2022, 8524400. [Google Scholar] [CrossRef]
- Zhang, J.; Qiu, X.; Wu, Y.; Zhu, Y.; Cao, Q.; Liu, X.; Cao, W. Combining texture, color, and vegetation indices from fixed-wing UAS imagery to estimate wheat growth parameters using multivariate regression methods. Comput. Electron. Agric. 2021, 185, 106138. [Google Scholar] [CrossRef]
- Pourazar, H.; Samadzadegan, F.; Javan, F.D. Aerial multispectral imagery for plant disease detection: Radiometric calibration necessity assessment. Eur. J. Remote Sens. 2019, 52, 17–31. [Google Scholar] [CrossRef] [Green Version]
- Al-Maamoun Ali, A.M. Intelligent Framework for Monitoring Crops in Greenhouses. Ph.D. Thesis, Queen’s University, Kingston, ON, Canada, 2020. [Google Scholar]
- Hameed, K.; Chai, D.; Rassau, A. A comprehensive review of fruit and vegetable classification techniques. Image Vis. Comput. 2018, 80, 24–44. [Google Scholar] [CrossRef]
- Kaur, S.; Pandey, S.; Goel, S. Plants Disease Identification and Classification Through Leaf Images: A Survey. Arch. Comput. Methods Eng. 2018, 26, 507–530. [Google Scholar] [CrossRef]
- Jajoo, P.; Jain, M.K.; Jangir, S. A Case Study on Machine Learning Techniques for Plant Disease Identification. In International Conference on Emerging Technologies in Computer Engineering; Springer: Cham, Switzerland, 2022; pp. 354–372. [Google Scholar]
- Sharma, P.; Berwal, Y.P.S.; Ghai, W. Performance analysis of deep learning CNN models for disease detection in plants using image segmentation. Inf. Process. Agric. 2019, 7, 566–574. [Google Scholar] [CrossRef]
- Bedi, P.; Gole, P. Plant disease detection using hybrid model based on convolutional autoencoder and convolutional neural network. Artif. Intell. Agric. 2021, 5, 90–101. [Google Scholar] [CrossRef]
- Whalen, K.; Yuhas, C. Low-Cost Drone and Sensor for Agricultural Applications on Small Farms in Tanzania. 2019. Available online: https://globalwater.osu.edu/files/Drone-Final-Design-Report-1.pdf (accessed on 4 January 2023).
- Marin Marcano, J. Design and Development of a UAV System for Multispectral Imaging and Remote Sensing Applications. Master’s Thesis, University of Alberta, Edmonton, AB, Canada, 2018. [Google Scholar]
- Maddikunta, P.K.R.; Hakak, S.; Alazab, M.; Bhattacharya, S.; Gadekallu, T.R.; Khan, W.Z.; Pham, Q.V. Unmanned aerial vehicles in smart agriculture: Applications, requirements, and challenges. IEEE Sens. J. 2021, 21, 17608–17619. [Google Scholar] [CrossRef]
- Pongnumkul, S.; Chaovalit, P.; Surasvadi, N. Applications of smartphone-based sensors in agriculture: A systematic review of research. J. Sens. 2015, 2015, 195308. [Google Scholar] [CrossRef] [Green Version]
- Huang, X.; Ruan, W.; Tang, Q.; Zhao, X. Bridging Formal Methods and Machine Learning with Global Optimisation. In International Conference on Formal Engineering Methods; Springer: Cham, Switzerland, 2022; pp. 1–19. [Google Scholar] [CrossRef]
- Larsen, K.; Legay, A.; Nolte, G.; Schlüter, M.; Stoelinga, M.; Steffen, B. Formal methods meet machine learning (F3ML). In International Symposium on Leveraging Applications of Formal Methods; Springer: Cham, Switzerland, 2022; pp. 393–405. [Google Scholar]
- Michailidis, E.T.; Maliatsos, K.; Skoutas, D.N.; Vouyioukas, D.; Skianis, C. Secure UAV-Aided Mobile Edge Computing for IoT: A Review. IEEE Access 2022, 10, 86353–86383. [Google Scholar] [CrossRef]
- Hassija, V.; Chamola, V.; Agrawal, A.; Goyal, A.; Luong, N.C.; Niyato, D.; Yu, F.R.; Guizani, M. Fast, reliable, and secure drone communication: A comprehensive survey. IEEE Commun. Surv. Tutor. 2021, 23, 2802–2832. [Google Scholar] [CrossRef]
- Lv, Z. The security of Internet of drones. Computer Commun. 2019, 148, 208–214. [Google Scholar] [CrossRef]
- Wu, T.; Guo, X.; Chen, Y.; Kumari, S.; Chen, C. Amassing the security: An enhanced authentication protocol for drone communications over 5G networks. Drones 2022, 6, 10. [Google Scholar] [CrossRef]
- Hsieh, T.-C.; Hung, M.-C.; Chiu, M.-L.; Wu, P.J. Challenges of UAVs Adoption for Agricultural Pesticide Spraying: A Social Cognitive Perspective. Preprints 2020, 2020010121. [Google Scholar]
- Sivakumar, S.; Bijoshkumar, G.; Rajasekharan, A.; Panicker, V.; Paramasivam, S.; Manivasagam, V.S.; Manalil, S. Evaluating the Expediency of Smartphone Applications for Indian Farmers and Other Stakeholders. Agriengineering 2022, 4, 656–673. [Google Scholar] [CrossRef]
- Vishnoi, V.K.; Kumar, K.; Kumar, B. A comprehensive study of feature extraction techniques for plant leaf disease detection. Multimed. Tools Appl. 2021, 81, 367–419. [Google Scholar] [CrossRef]
- Manju, S.; Helenprabha, K. Sub-band Selection-Based Dimensionality Reduction Approach for Remote Sensing Hyperspectral Images. In Mobile Radio Communications and 5G Networks; Springer: Singapore, 2022; pp. 167–178. [Google Scholar]
- Al-Bayati, J.S.H.; Üstündağ, B.B. Evolutionary Feature Optimization for Plant Leaf Disease Detection by Deep Neural Networks. Int. J. Comput. Intell. Syst. 2020, 13, 12–23. [Google Scholar] [CrossRef] [Green Version]
- Kaur, N.; Devendran, V. Plant Leaf Disease Diagnostic System Built on Feature Extraction and Ensemble Classification. In Proceedings of the 2021 9th International Conference on Reliability, Infocom Technologies and Optimization (Trends and Future Directions) (ICRITO), Noida, India, 3–4 September 2021; pp. 1–3. [Google Scholar]
- Johnson, N.; Kumar, M.B.S.; Dhannia, T. A survey on Deep Learning Architectures for effective Crop Data Analytics. In Proceedings of the 2021 International Conference on Advances in Computing and Communications (ICACC), Kochi, India, 21–23 October 2021; pp. 1–10. [Google Scholar]
- Zeggada, A.; Stella, A.; Caliendo, G.; Melgani, F.; Barazzuol, M.; La Porta, N.; Goller, R. Leaf development index estimation using UAV imagery for fighting apple scab. In Proceedings of the 2017 IEEE International Geo-Science and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 5838–5841. [Google Scholar]
- Kour, V.P.; Arora, S. Fruit disease detection using rule-based classification. In Smart Innovations in Communication and Computational Sciences; Springer: Singapore, 2019; pp. 295–312. [Google Scholar]
- Sugiarti, Y.; Supriyatna, A.; Carolina, I.; Amin, R.; Yani, A. Model Naïve Bayes Classifiers for Detection Apple Diseases. In Proceedings of the 2021 9th International Conference on Cyber and IT Service Management (CITSM), Bengkulu, Indonesia, 22–23 September 2021; pp. 1–4. [Google Scholar]
- Zhang, C.; Shanwen, Z.; Yang, J.; Shi, Y.; Chen, J. Apple leaf disease identification using genetic algorithm and correlation based feature selection method. Int. J. Agric. Biol. Eng. 2017, 10, 74–83. [Google Scholar]
- Khan, M.A.; Akram, T.; Sharif, M.; Saba, T. Fruits diseases classification: Exploiting a hierarchical framework for deep features fusion and selection. Multimed. Tools Appl. 2020, 79, 25763–25783. [Google Scholar] [CrossRef]
- Rehman, T.U.; Mahmud, M.S.; Chang, Y.K.; Jin, J.; Shin, J. Current and future applications of statistical machine learning algorithms for agricultural machine vision systems. Comput. Electron. Agric. 2019, 156, 585–605. [Google Scholar] [CrossRef]
- Chohan, M.; Khan, A.; Chohan, R.; Katpar, S.H.; Mahar, M.S. Plant disease detection using deep learning. Int. J. Recent Technol. Eng. 2020, 9, 909–914. [Google Scholar] [CrossRef]
- Luo, Y.; Sun, J.; Shen, J.; Wu, X.; Wang, L.; Zhu, W. Apple Leaf Disease Recognition and Sub-Class Categorization Based on Improved Multi-Scale Feature Fusion Network. IEEE Access 2021, 9, 95517–95527. [Google Scholar] [CrossRef]
- Francis, M.; Deisy, C. Mathematical and Visual Understanding of a Deep Learning Model Towards m-Agriculture for Disease Diagnosis. Arch. Comput. Methods Eng. 2020, 28, 1129–1145. [Google Scholar] [CrossRef]
- Singh, T.; Kumar, K.; Bedi, S. A Review on Artificial Intelligence Techniques for Disease Recognition in Plants. IOP Conf. Series Mater. Sci. Eng. 2021, 1022, 012032. [Google Scholar] [CrossRef]
- Karatzinis, G.D.; Apostolidis, S.D.; Kapoutsis, A.C.; Panagiotopoulou, L.; Boutalis, Y.S.; Kosmatopoulos, E.B. Towards an Integrated Low-Cost Agricultural Monitoring System with Unmanned Aircraft System. In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 1–4 September 2020. [Google Scholar] [CrossRef]
- Soltani Firouz, M.; Sardari, H. Defect Detection in Fruit and Vegetables by Using Machine Vision Systems and Image Processing. Food Eng. Rev. 2022, 14, 353–379. [Google Scholar] [CrossRef]
- Geetharamani, G.; Pandian, A. Identification of plant leaf diseases using a nine-layer deep convolutional neural network. Comput. Electr. Eng. 2019, 76, 323–338. [Google Scholar]
- Sivasakthi, S.; Phil, M. Plant leaf disease identification using image processing and svm, ann classifier methods. In Proceedings of the International Conference on Artificial Intelligence and Machine learning, Vancouver, BC, Canada, 30–31 May 2020; pp. 30–31. [Google Scholar]
- Dwivedi, P.; Kumar, S.; Vijh, S.; Chaturvedi, Y. Study of Machine Learning Techniques for Plant Disease Recognition in Agriculture. In Proceedings of the 2021 11th International Conference on Cloud Computing, Data Science & Engineering (Confluence), Noida, India, 28–29 January 2021; pp. 752–756. [Google Scholar] [CrossRef]
- Kartikeyan, P.; Shrivastava, G. Review on Emerging Trends in Detection of Plant Diseases using Image Processing with Machine Learning. Int. J. Comput. Appl. 2021, 174, 39–48. [Google Scholar] [CrossRef]
- Khanal, S.; Kc, K.; Fulton, J.P. Shearer, S.; Ozkan, E. Remote sensing in agriculture—Accomplishments, limitations, and opportunities. Remote Sens. 2020, 12, 3783. [Google Scholar] [CrossRef]
- Huang, S.; Zhou, G.; He, M.; Chen, A.; Zhang, W.; Hu, Y. Detection of Peach Disease Image Based on Asymptotic Non-Local Means and PCNN-IPELM. IEEE Access 2020, 8, 136421–136433. [Google Scholar] [CrossRef]
- Douarre, C.; Crispim-Junior, C.F.; Gelibert, A.; Tougne, L.; Rousseau, D. Novel data augmentation strategies to boost supervised segmentation of plant disease. Comput. Electron. Agric. 2019, 165, 104967. [Google Scholar] [CrossRef]
- Karpyshev, P.; Ilin, V.; Kalinov, I.; Petrovsky, A.; Tsetserukou, D. Autonomous Mobile Robot for Apple Plant Disease Detection based on CNN and Multi-Spectral Vision System. In Proceedings of the 2021 IEEE/SICE International Symposium on System Integration (SII), Fukushima, Japan, 11–14 January 2021; pp. 157–162. [Google Scholar] [CrossRef]
- Logashov, D.; Shadrin, D.; Somov, A.; Pukalchik, M.; Uryasheva, A.; Prabhat Gupta, H.; Rodichenko, N. Apple Trees Diseases Detection Through Computer Vision in Embedded Systems. In Proceedings of the 2021 IEEE 30th International Symposium on Industrial Electronics (ISIE), Kyoto, Japan, 20–23 June 2021; pp. 1–6. [Google Scholar]
- Neupane, K.; Baysal-Gurel, F. Automatic Identification and Monitoring of Plant Diseases Using Unmanned Aerial Vehicles: A Review. Remote Sens. 2021, 13, 3841. [Google Scholar] [CrossRef]
- Prasad, A.; Mehta, N.; Horak, M.; Bae, W.D. A two-step machine learning approach for crop disease detection: An application of GAN and UAV technology. arXiv Preprint 2021, arXiv:2109.11066. [Google Scholar] [CrossRef]
- Abade, A.; Ferreira, P.A.; Vidal, F.D.B. Plant diseases recognition on images using convolutional neural networks: A systematic review. Comput. Electron. Agric. 2021, 185, 106125. [Google Scholar] [CrossRef]
- Ahmed, A.; Reddy, G. A Mobile-Based System for Detecting Plant Leaf Diseases Using Deep Learning. Agriengineering 2021, 3, 478–493. [Google Scholar] [CrossRef]
- Rehman, Z.U.; Khan, M.A.; Ahmed, F.; Damaševičius, R.; Naqvi, S.R.; Nisar, W.; Javed, K. Recognizing apple leaf diseases using a novel parallel real-time processing framework based on MASK RCNN and transfer learning: An application for smart agriculture. IET Image Process. 2021, 15, 2157–2168. [Google Scholar] [CrossRef]
- Afzaal, U.; Bhattarai, B.; Pandeya, Y.R.; Lee, J. An Instance Segmentation Model for Strawberry Diseases Based on Mask R-CNN. Sensors 2021, 21, 6565. [Google Scholar] [CrossRef]
- Liu, J.; Wang, X. Plant diseases and pests detection based on deep learning: A review. Plant Methods 2021, 17, 22. [Google Scholar] [CrossRef]
- Ahmad, A.; Saraswat, D.; El Gamal, A. A survey on using deep learning techniques for plant disease diagnosis and recommendations for development of appropriate tools. Smart Agric. Technol. 2023, 3, 100083. [Google Scholar] [CrossRef]
- Storey, G.; Meng, Q.; Li, B. Leaf Disease Segmentation and Detection in Apple Orchards for Precise Smart Spraying in Sustainable Agriculture. Sustainability 2022, 14, 1458. [Google Scholar] [CrossRef]
- Raman, S.; Chougule, A.; Chamola, V. A Low Power Consumption Mobile Based IoT Framework for Real-time Classification and Segmentation for Apple Disease. Microprocess. Microsyst. 2022, 94, 104656. [Google Scholar] [CrossRef]
- Wang, C.; Liu, B.; Liu, L.; Zhu, Y.; Hou, J.; Liu, P.; Li, X. A review of deep learning used in the hyperspectral image analysis for agriculture. Artif. Intell. Rev. 2021, 54, 5205–5253. [Google Scholar] [CrossRef]
- Mohan, A.; Srivastava, K.; Malhotra, G.; Khan, N.U. Plant Disease Detection Using Clustering Based Segmentation and Neural Networks. In Proceedings of the 2020 Sixth International Conference on Parallel, Distributed and Grid Computing (PDGC), Waknaghat, India, 6–8 November 2020; pp. 506–510. [Google Scholar] [CrossRef]
- Chaudhary, B.; Kumar, V. Emerging Technological Frameworks for the Sustainable Agriculture and Environmental Management. Sustain. Horiz. 2022, 3, 100026. [Google Scholar] [CrossRef]
- Kodors, S.; Lācis, G.; Moročko-Bičevska, I.; Zarembo, I.; Sokolova, O.; Bartulsons, T.; Apeināns, I.; Žukovs, V. Apple Scab Detection in the Early Stage of Disease Using a Convolutional Neural Network. Proceedings Latv. Acad. Sci. Sect. B Nat. Exact Appl. Sci. 2022, 76, 482–487. [Google Scholar] [CrossRef]
- Sumithra, M.G.; Saranya, N. Particle Swarm Optimization (PSO) with fuzzy c means (PSO-FCM)–based segmentation and machine learning classifier for leaf diseases prediction. Concurr. Comput. Pract. Exp. 2021, 33, e5312. [Google Scholar] [CrossRef]
- Kohli, P.; Kumar, I.; Vimal, V. Plant Leaf Disease Identification Using Unsupervised Fuzzy C-Means Clustering and Supervised Classifiers. In Cyber Security in Intelligent Computing and Communications; Springer: Singapore, 2022; pp. 281–293. [Google Scholar] [CrossRef]
- Issad, H.A.; Aoudjit, R.; Rodrigues, J. A comprehensive review of Data Mining techniques in smart agriculture. Eng. Agric. Environ. Food 2019, 12, 511–525. [Google Scholar] [CrossRef]
- Kaur, G.; Arora, P.; Kaur, J. Detection of Plant Leaf Disease Using Image Processing and Deep Learning Technique—A Review. In Proceedings of International Conference on Computational Intelligence, Data Science and Cloud Computing; Springer: Singapore, 2021; pp. 369–380. [Google Scholar] [CrossRef]
- Applalanaidu, M.V.; Kumaravelan, G. A review of machine learning approaches in plant leaf disease detection and classification. In Proceedings of the 2021 Third International Conference on Intelligent Communication Technologies and Virtual Mobile Networks (ICICV), Tirunelveli, India, 4–6 February 2021; pp. 716–724. [Google Scholar]
- Chéné, Y.; Belin, E.; Chapeau-Blondeau, F.; Caffier, V.; Boureau, T.; Rousseau, D. Anatomo-functional bimodality imaging for plant phenotyping: An insight through depth imaging coupled to thermal imaging. In Plant Image Analysis: Fundamentals and Applications; CRC Press: Boca Raton, FL, USA, 2014; pp. 179–206. [Google Scholar]
- Domingues, T.; Brandão, T.; Ferreira, J.C. Machine Learning for Detection and Prediction of Crop Diseases and Pests: A Comprehensive Survey. Agriculture 2022, 12, 1350. [Google Scholar] [CrossRef]
- Bhadur, G.; Rani, R. Agricultural Crops Disease Identification and Classification through Leaf Images using Machine Learning and Deep Learning Technique: A Review. In Proceedings of the International Conference on Innovative Computing & Communications (ICICC), New Delhi, India, 20–22 February 2020. [Google Scholar]
- Albattah, W.; Javed, A.; Nawaz, M.; Masood, M.; Albahli, S. Artificial intelligence-based drone system for multiclass plant disease detection using an improved efficient convolutional neural network. Front. Plant Sci. 2022, 13, 808380. [Google Scholar] [CrossRef] [PubMed]
- Khadidos, A.O. Early Plant Disease Detection Using Gray-level Co-occurrence Method with Voting Classification Techniques. Int. Trans. J. Eng. Manag. Appl. Sci. Technol. 2021, 12, 1–15. [Google Scholar]
- Ahmed, I.; Yadav, P.K. Plant disease detection using machine learning approaches. Expert Syst. 2022, e13136. [Google Scholar] [CrossRef]
- Jackulin, C.; Murugavalli, S. A comprehensive review on detection of plant disease using machine learning and deep learning approaches. Meas. Sensors 2022, 24, 100441. [Google Scholar] [CrossRef]
- Cruz, M.; Mafra, S.; Teixeira, E.; Figueiredo, F. Smart Strawberry Farming Using Edge Computing and IoT. Sensors 2022, 22, 5866. [Google Scholar] [CrossRef]
- Golhani, K.; Balasundram, S.K.; Vadamalai, G.; Pradhan, B. A review of neural networks in plant disease detection using hyperspectral data. Inf. Process. Agric. 2018, 5, 354–371. [Google Scholar] [CrossRef]
- Arsenovic, M.; Karanovic, M.; Sladojevic, S.; Anderla, A.; Stefanovic, D. Solving Current Limitations of Deep Learning Based Approaches for Plant Disease Detection. Symmetry 2019, 11, 939. [Google Scholar] [CrossRef] [Green Version]
- Hahn, F. Actual Pathogen Detection: Sensors and Algorithms—A Review. Algorithms 2009, 2, 301–338. [Google Scholar] [CrossRef]
- Saleem, M.H.; Potgieter, J.; Arif, K.M. Plant Disease Detection and Classification by Deep Learning. Plants 2019, 8, 468. [Google Scholar] [CrossRef] [Green Version]
- Tugrul, B.; Elfatimi, E.; Eryigit, R. Convolutional Neural Networks in Detection of Plant Leaf Diseases: A Review. Agriculture 2022, 12, 1192. [Google Scholar] [CrossRef]
- Sujatha, R.; Chatterjee, J.M.; Jhanjhi, N.; Brohi, S.N. Performance of deep learning vs machine learning in plant leaf disease detection. Microprocess. Microsyst. 2020, 80, 103615. [Google Scholar] [CrossRef]
- Mukherjee, S.; Kumar, P.; Saini, R.; Roy, P.P.; Dogra, D.P.; Kim, B.G. Plant disease identification using deep neural networks. J. Multimed. Inf. Syst. 2017, 4, 233–238. [Google Scholar]
- Baranwal, S.; Khandelwal, S.; Arora, A. Deep learning convolutional neural network for apple leaves disease detection. In Proceedings of the International Conference on Sustainable Computing in Science, Technology and Management (SUSCOM), Amity University Rajasthan, Jaipur, India, 26–28 February 2019. [Google Scholar]
- Singh, S.; Gupta, S. Apple scab and marsonina coronaria diseases detection in apple leaves using machine learning. Int. J. Pure Appl. Math. 2018, 118, 1151–1166. [Google Scholar]
- Agarwal, M.; Kaliyar, R.K.; Singal, G.; Gupta, S.K. FCNN-LDA: A Faster Convolution Neural Network model for Leaf Disease identification on Apple’s leaf dataset. In Proceedings of the 2019 12th International Conference on Information & Communication Technology and System (ICTS), Surabaya, Indonesia, 18 July 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 246–251. [Google Scholar]
- Gorretta, N.; Nouri, M.; Herrero, A.; Gowen, A.; Roger, J.-M. Early detection of the fungal disease” apple scab” using SWIR hyperspectral imaging. In Proceedings of the 2019 10th Workshop on Hyperspectral Imaging and Signal Processing: Evolution in Remote Sensing (WHISPERS), Amsterdam, The Netherlands, 24–26 September 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–4. [Google Scholar]
- Assuncao, E.; Diniz, C.; Gaspar, P.D.; Proenca, H. Decision-making support system for fruit diseases classification using Deep Learning. In Proceedings of the International Conference on Decision Aid Sciences and Application (DASA), Sakheer, Bahrain, 8–9 November 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 652–656. [Google Scholar]
- Yan, Q.; Yang, B.; Wang, W.; Wang, B.; Chen, P.; Zhang, J. Apple Leaf Diseases Recognition Based on An Improved Convolutional Neural Network. Sensors 2020, 20, 3535. [Google Scholar] [CrossRef]
- Bansal, P.; Kumar, R.; Kumar, S. Disease Detection in Apple Leaves Using Deep Convolutional Neural Network. Agriculture 2021, 11, 617. [Google Scholar] [CrossRef]
- Alsayed, A.; Alsabei, A.; Arif, M. Classification of apple tree leaves diseases using deep learning methods. Int. J. Comput. Sci. Netw. Secur. 2021, 21, 324–330. [Google Scholar]
- Hassan, S.M.; Maji, A.K.; Jasiński, M.; Leonowicz, Z.; Jasińska, E. Identification of plant-leaf diseases using CNN and transfer-learning approach. Electronics 2021, 10, 1388. [Google Scholar] [CrossRef]
- Singh, S.; Gupta, I.; Gupta, S.; Koundal, D.; Aljahdali, S.; Mahajan, S.; Pandit, A.K. Deep learning based automated detection of diseases from apple leaf images. CMC Comput. Mater. Contin. 2022, 71, 1849–1866. [Google Scholar]
- Hashan, A.M.; Islam, R.M.R.U.; Avinash, K. Apple Leaf Disease Classification Using Image Dataset: A Multilayer Convolutional Neural Network Approach. Inform. Autom. 2022, 21, 710–728. [Google Scholar] [CrossRef]
- Khan, A.I.; Quadri, S.; Banday, S.; Shah, J.L. Deep diagnosis: A real-time apple leaf disease detection system based on deep learning. Comput. Electron. Agric. 2022, 198, 107093. [Google Scholar] [CrossRef]
- Bouguettaya, A.; Zarzour, H.; Kechida, A.; Taberkit, A.M. A survey on deep learning-based identification of plant and crop diseases from UAV-based aerial images. Cluster Comput. 2022. [Google Scholar] [CrossRef] [PubMed]
- Kendler, S.; Aharoni, R.; Young, S.; Sela, H.; Kis-Papo, T.; Fahima, T.; Fishbain, B. Detection of crop diseases using enhanced variability imagery data and convolutional neural networks. Comput. Electron. Agric. 2022, 193, 106732. [Google Scholar] [CrossRef]
- Faraz, A.; Khan, N.A.; Raza, H.Y.; Malik, Z.; Çetinel, B. Remote Sensing: A New Tool for Disease Assessment in Crops. In Trends in Plant Disease Assessment; Springer: Singapore, 2022; pp. 47–67. [Google Scholar] [CrossRef]
- Terentev, A.; Dolzhenko, V.; Fedotov, A.; Eremenko, D. Current State of Hyperspectral Remote Sensing for Early Plant Disease Detection: A Review. Sensors 2022, 22, 757. [Google Scholar] [CrossRef] [PubMed]
- Han, X.; Thomasson, J.A.; Swaminathan, V.; Wang, T.; Siegfried, J.; Raman, R.; Rajan, N.; Neely, H. Field-Based Calibration of Unmanned Aerial Vehicle Thermal Infrared Imagery with Temperature-Controlled References. Sensors 2020, 20, 7098. [Google Scholar] [CrossRef]
- Li, Z.; Guo, R.; Li, M.; Chen, Y.; Li, G. A review of computer vision technologies for plant phenotyping. Comput. Electron. Agric. 2020, 176, 105672. [Google Scholar] [CrossRef]
- Gogoi, N.; Deka, B.; Bora, L. Remote sensing and its use in detection and monitoring plant diseases: A review. Agric. Rev. 2018, 39, 307–313. [Google Scholar] [CrossRef]
- Singh, A.K.; Ganapathysubramanian, B.; Sarkar, S.; Singh, A. Deep Learning for Plant Stress Phenotyping: Trends and Future Perspectives. Trends Plant Sci. 2018, 23, 883–898. [Google Scholar] [CrossRef] [Green Version]
- Goswami, S.N.; Satapathy, R.R. Survey of Remote Sensing Technique in Plant Disease Management. Asian J. Agric. Extension, Econ. Sociol. 2021, 39, 444–448. [Google Scholar] [CrossRef]
- Zhang, C.; Valente, J.; Kooistra, L.; Guo, L.; Wang, W. Orchard management with small unmanned aerial vehicles: A survey of sensing and analysis approaches. Precis. Agric. 2021, 22, 2007–2052. [Google Scholar] [CrossRef]
- Zhou, X.; Lee, W.S.; Ampatzidis, Y.; Chen, Y.; Peres, N.; Fraisse, C. Strawberry Maturity Classification from UAV and Near-Ground Imaging Using Deep Learning. Smart Agric. Technol. 2021, 1, 100001. [Google Scholar] [CrossRef]
- Park, Y.-L.; Cho, J.R.; Choi, K.-H.; Kim, H.R.; Kim, J.W.; Kim, S.J.; Lee, D.-H.; Park, C.-G.; Cho, Y.S. Advances, Limitations, and Future Applications of Aerospace and Geospatial Technologies for Apple IPM. Korean J. Appl. Entomol. 2021, 60, 135–143. [Google Scholar]
Figure 1.
Structure of the paper.

Figure 2.
Possible challenges in Scab detection in Rosaceae fruits using UAVs.
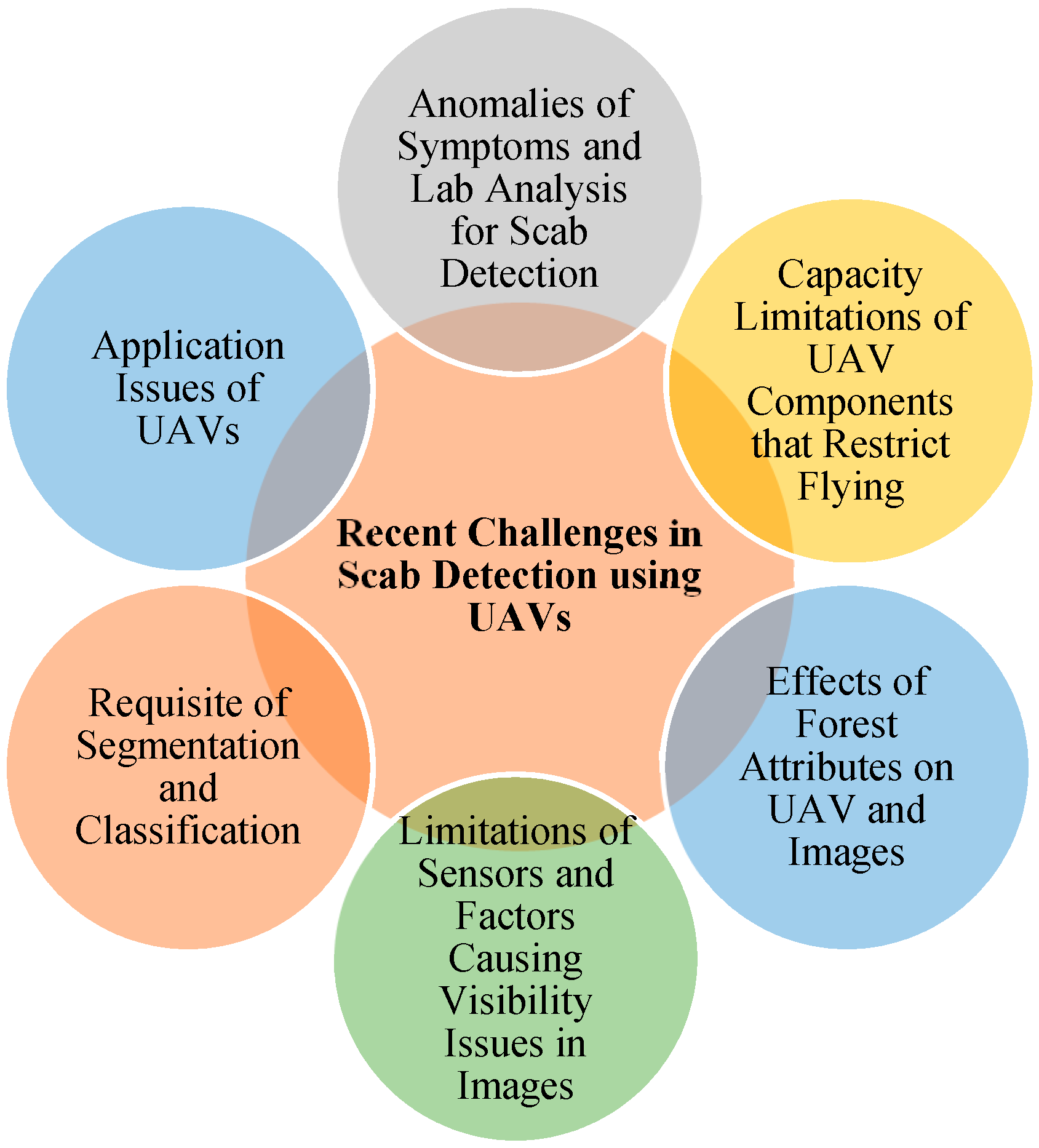
Figure 3.
Mask R-CNN for classification.


{kind=link}
{kind=link}
{kind=link}
Table 1.
Summary of recent technologies used for UAV imagery.
| Technologies with UAVs | Usage | Reference No. |
|---|---|---|
| AI |
| [16] |
| SLAM |
| [17] |
| Camera/Sensor, improved communication protocol and speedy data processors |
| [18] |
| Sensors |
| [19,20,21] |
| Swarm technology, advanced systems, and IoT devices |
| [12,22,23,24,25] |
| Satellites and AI, robotics with DL, and soft grippers |
| [26] |
| Multirobots |
| [27] |
Table 2.
Summary of recent methodologies used for scab disease detection.
| Challenge | Advanced Methodologies to Counter the Challenges | Reference No. |
|---|---|---|
| Anomalies of Symptoms and Laboratory Analysis for Scab Detection |
| [44,54,55,56] |
| Capacity Limitations of UAV Components that Restrict Flying |
| [55,57,58,59,60] |
| Effects of Forest Attributes on UAV and Images |
| [61,62,63,64] |
| Limitations of Sensors and Factors Causing Visibility Issues in Images |
| [65,66,67,68,69] |
| Requisite of Segmentation and Classification |
| [19,70,71,72,73,74] |
| Application Issues of UAVs for Agricultural Purposes |
| [4,75,76,77,78,79,80,81,82,83,85,86] |
Table 3.
Feature extraction techniques for Scab detection in Rosaceae family fruits.
| Extracted Feature | Reference No. | Feature Extraction Technique | Rosaceae Family Fruit | Accuracy | Strengths |
|---|---|---|---|---|---|
| Shape | [92] | Median filter and Morphological filter | Apple | NA |
|
| Color | [93] | Blob analysis (Thresholding) | Apple | 91.66% |
|
| Texture | [94] | GLCM | Apple | 96.43% |
|
| Shape, Texture, and Color | [95] | RGB model, HSI model, and SGDM model | Apple | Training set—95.48% Test set—94.22% |
|
| Deep Features | [96] | VGG-s and AlexNet-based DCNN | Apple, Peach and Cherry | 97.8% |
|
| Color, Spectral, Texture, and Shape | [97] | Statistical ML algorithms | Peaches, Apples, Strawberries, and others | Higher |
|
| Edges, RBG values, and Others | [98] | CNN, VGG-based CNN, and InceptionV3-based CNN | Strawberry, Blueberry, Cherry, Raspberry, Peach, Apple, and others | 98% |
|
| Multiscale Features | [99] | iResNet | Apple | Original dataset—94.24% Preprocessed dataset—94.99% |
|
| Grayscale, Color, and Segmented Features | [100] | CNN | Apple | 99.6% |
|
Table 4.
Analysis of different segmentation approaches.
| Authors | Reference No. | Segmentation Approach | Advantages |
|---|---|---|---|
| Douarre et al. | [110] | SegNet-based CNN |
|
| Karpyshev et al. | [111] | Mask R-CNN-based DNN |
|
| Logashov et al. | [112] | Computer-vision |
|
| Neupane and Baysal-Gurel | [113] | ANNs, K-means, DT, SVMs, KNN, and Regression |
|
| Prasad et al. | [114] | EfficientDet-based DCGAN |
|
| Abade et al. | [115] | Different CNN- based architectures |
|
| Ahmed and Reddy | [116] | CNN |
|
| Rehman et al. | [117] | Modified mask R-CNN |
|
| Afzaal et al. | [118] | Tensorflow-based mask R-CNN |
|
| Liu and Wang | [119] | FCN, SegNet, UNet, and Mask R-CNN |
|
| Wan et al. | [12] | Edge-based, Thresholding, and Region-based |
|
| Ahmad et al. | [120] | DL |
|
| Storey et al. | [121] | Mask R-CNN with ResNet-50, MobileNeaV3-Large-Mobile, and MobileNetV3-Large backbones |
|
| Raman et al. | [122] | UNet with atrous skip connections |
|
Table 5.
Classification techniques for Scab detection in the Rosaceae family.
| Classification Algorithm/Model | Reference | Diseases-Rosaceae Fruits | Contributions | Limitations |
|---|---|---|---|---|
| Bayesian Decision Theory, and A-Scab Model | [90] | Scab—Apple |
|
|
| GoogLeNet | [146] | Healthy, Scab, Black rot, and Cedar rust—Apples |
|
|
| [147] | Healthy, Scab, Black rot, and Cedar rust—Apples |
|
| |
| SVM, KNN, DT, and Naïve Bayes | [148] | Scab and Marsonina coronaria—Apples |
|
|
| Fuzzy Logic | [92] | Scab—Apple |
|
|
| FCNN-LDA | [149] | Healthy, Black rot, Scab, and Cedar—Apples |
|
|
| PLSDA | [150] | Healthy and Scab—Apples |
|
|
| Multiclass-SVM | [95] | Scab, Rust, and Black rot—Apples, Bacterial spots—Peach, and Powdery Mildew—Cherry |
|
|
| Simple CNN, VGG, and InceptionV3 | [96] | Healthy, Scab and multiple diseases—Apples, Peaches, different berries, and other |
|
|
| MobileNetV2 | [151] | Healthy, Rot, Mildew, and Scab—Peaches |
|
|
| PCNN-IPELM | [110] | Normal, Scab, Black spot, Brown rot, and Anthracnose—Peaches |
|
|
| VGG16-based iCNN | [152] | Healthy, Cedar rust, Scab, and Frogeye spot—Apples |
|
|
| CNN | [99] | Healthy, Cedar rust, Scab, and Black rot—Apples |
|
|
| Naïve Bayes | [93] | Healthy, Scab, Rot, and Blotch—Apples |
|
|
| DenseNet121, EfficientNet, NoisyStudent, and EfficientNetB7 with Ensemble | [153] | Healthy, Cedar rust, Scab, and other diseases—Apples |
|
|
| VGG, ResNetV2, InceptionV3, and MobileNetV2 | [154] | Healthy, Scab, Rust, and multiple diseases—Apples |
|
|
| VGG16 | [112] | Healthy, Scab, and Rust—Apples |
|
|
| Linear Regression (ML) | [29] | Scab—Apple |
|
|
| InceptionV3, InceptionResNetV2, MobileNetV2, and EfficientNetB0 | [155] | Healthy, Scab, and other diseases—Apple, Peach, Strawberry, Cherry, and others |
|
|
| Three CNN Models | [156] | Scab and Marsonina coronaria—Apple |
|
|
| MCNN | [157] | Cedar rust, Black rot, and Scab—Apples |
|
|
| Xception, EfficientDet-D0, YOLOv4, and Faster-RCNN | [158] | Scab and other diseases and pests—Apples |
|
|
Table 6.
Advantages of sensors for acquiring UAV-based images.
| References | UAV Type | Rosaceae Fruit | Imaging Sensors | Advantages |
|---|---|---|---|---|
| [96] | Octocopter with a 3-axis gimbal | Apple | Multispectral Thermal |
|
| [165] | UAV and other airborne remote sensors | Apple and others | RGB Thermal Multispectral Hyperspectral Fluorescence |
|
| [166] | UAVs and manual devices | Apple, Peaches, Strawberry, and others | Hyperspectral |
|
| [110] | Autonomous mobile robot | Apple | Visible Hyperspectral Multispectral |
|
| [111] | Fixed-wing and rotary-wing UAVs | Apple, Peaches, Strawberry, and others | Multispectral RGB Thermal LiDAR Hyperspectral |
|
| [167] | UAV and other airborne remote sensors | Apple and others | Multispectral Hyperspectral Fluorescence Thermography |
|
| [168] | Fixed-wing UAVs, rotary-wing UAVs, and VTOL | Apple, Almonds, Peaches, and others | Multispectral RGB Thermal LiDAR Hyperspectral |
|
| [44] | UAV and other airborne remote sensors | Strawberry | Multispectral RGB Thermal LiDAR Fluorescence Hyperspectral |
|
| [169] | UAV and near-grounding digital camera | Strawberry | RGB Digital |
|
| [170] | Rotary-wing drones, fixed-wing drones, and satellites | Apples | Thermal RGB Multispectral NIR Hyperspectral |
|
| [11] | UAVs and other robots | Apple, Cherry, Peaches, and others | RGB Multispectral Hyperspectral Thermal LiDAR RGB-D |
|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Ali, Z.A.; Yang, C.; Israr, A.; Zhu, Q. A Comprehensive Review of Scab Disease Detection on Rosaceae Family Fruits via UAV Imagery. Drones 2023, 7, 97. https://doi.org/10.3390/drones7020097
AMA Style
Ali ZA, Yang C, Israr A, Zhu Q. A Comprehensive Review of Scab Disease Detection on Rosaceae Family Fruits via UAV Imagery. Drones. 2023; 7(2):97. https://doi.org/10.3390/drones7020097
Chicago/Turabian StyleAli, Zain Anwar, Chenguang Yang, Amber Israr, and Quanmin Zhu. 2023. "A Comprehensive Review of Scab Disease Detection on Rosaceae Family Fruits via UAV Imagery" Drones 7, no. 2: 97. https://doi.org/10.3390/drones7020097