
Advanced Air Mobility Operation and Infrastructure for Sustainable Connected eVTOL Vehicle


1
School of Aerospace, Transport and Manufacturing, Cranfield University, Cranfield MK43 0AL, UK
2
Department of Electrical Engineering, University of North Texas, Denton, TX 76203, USA
*
Author to whom correspondence should be addressed.
Drones 2023, 7(5), 319; https://doi.org/10.3390/drones7050319
Submission received: 19 March 2023
/
Revised: 5 May 2023
/
Accepted: 7 May 2023
/
Published: 16 May 2023
(This article belongs to the Special Issue Next Generation of Unmanned Aircraft Systems and Services)
Abstract
:Advanced air mobility (AAM) is an emerging sector in aviation aiming to offer secure, efficient, and eco-friendly transportation utilizing electric vertical takeoff and landing (eVTOL) aircraft. These vehicles are designed for short-haul flights, transporting passengers and cargo between urban centers, suburbs, and remote areas. As the number of flights is expected to rise significantly in congested metropolitan areas, there is a need for a digital ecosystem to support the AAM platform. This ecosystem requires seamless integration of air traffic management systems, ground control systems, and communication networks, enabling effective communication between AAM vehicles and ground systems to ensure safe and efficient operations. Consequently, the aviation industry is seeking to develop a new aerospace framework that promotes shared aerospace practices, ensuring the safety, sustainability, and efficiency of air traffic operations. However, the lack of adequate wireless coverage in congested cities and disconnected rural communities poses challenges for large-scale AAM deployments. In the immediate recovery phase, incorporating AAM with new air-to-ground connectivity presents difficulties such as overwhelming the terrestrial network with data requests, maintaining link reliability, and managing handover occurrences. Furthermore, managing eVTOL traffic in urban areas with congested airspace necessitates high levels of connectivity to support air routing information for eVTOL vehicles. This paper introduces a novel concept addressing future flight challenges and proposes a framework for integrating operations, infrastructure, connectivity, and ecosystems in future air mobility. Specifically, it includes a performance analysis to illustrate the impact of extensive AAM vehicle mobility on ground base station network infrastructure in urban environments. This work aims to pave the way for future air mobility by introducing a new vision for backbone infrastructure that supports safe and sustainable aviation through advanced communication technology.
1. Introduction
Advanced air mobility (AAM) is a growing field, with a focus on developing air transportation systems that can be integrated into urban environments to provide faster, more efficient, and more environmentally friendly transportation options. Air mobility refers to the use of aircraft, including helicopters, tilt-rotors, and electric vertical take-off and landing (eVTOL) vehicles, to transport passengers and cargo within urban areas. AAM aims to provide a faster, more efficient, and environmentally friendly mode of transportation, particularly in congested urban areas. AAM technology is still in its early stages, but many companies, including major aerospace companies and start-ups, as well as standards [1], are investing in the development of eVTOL vehicles and related infrastructure, such as charging stations and landing pads [2]. The use of AAM is expected to provide benefits such as reducing traffic congestion, improving connectivity and accessibility, and reducing carbon emissions from ground transportation. However, there are also concerns about the safety and noise levels of AAM vehicles and their impact on urban landscapes [3]. The vehicle mostly considered for AAM operations is an eVTOL aircraft capable of carrying passengers and air cargo with a limited capacity. Like any other flying platform with humans on board and flying over human living areas, AAM vehicles require a highly reliable and intelligent system of communication, navigation, and surveillance (CNS) [4,5] to ensure safe operations and to avoid life-threatening accidents. When it comes to autonomous and beyond visual line of sight (BVLOS) flights in future, the reliability and robustness of the communication link between the AAM vehicle and ground control stations is the key factor in safe AAM operations. One of the key challenges for AAM connectivity is the need for secure and reliable communication networks that can handle the massive amounts of data that these vehicles generate [6] while the AAM vehicle flies through controlled and uncontrolled airspace. When flying through controlled airspace, it should be in communication with air traffic management (ATM) entities on the ground and follow their instructions [7].
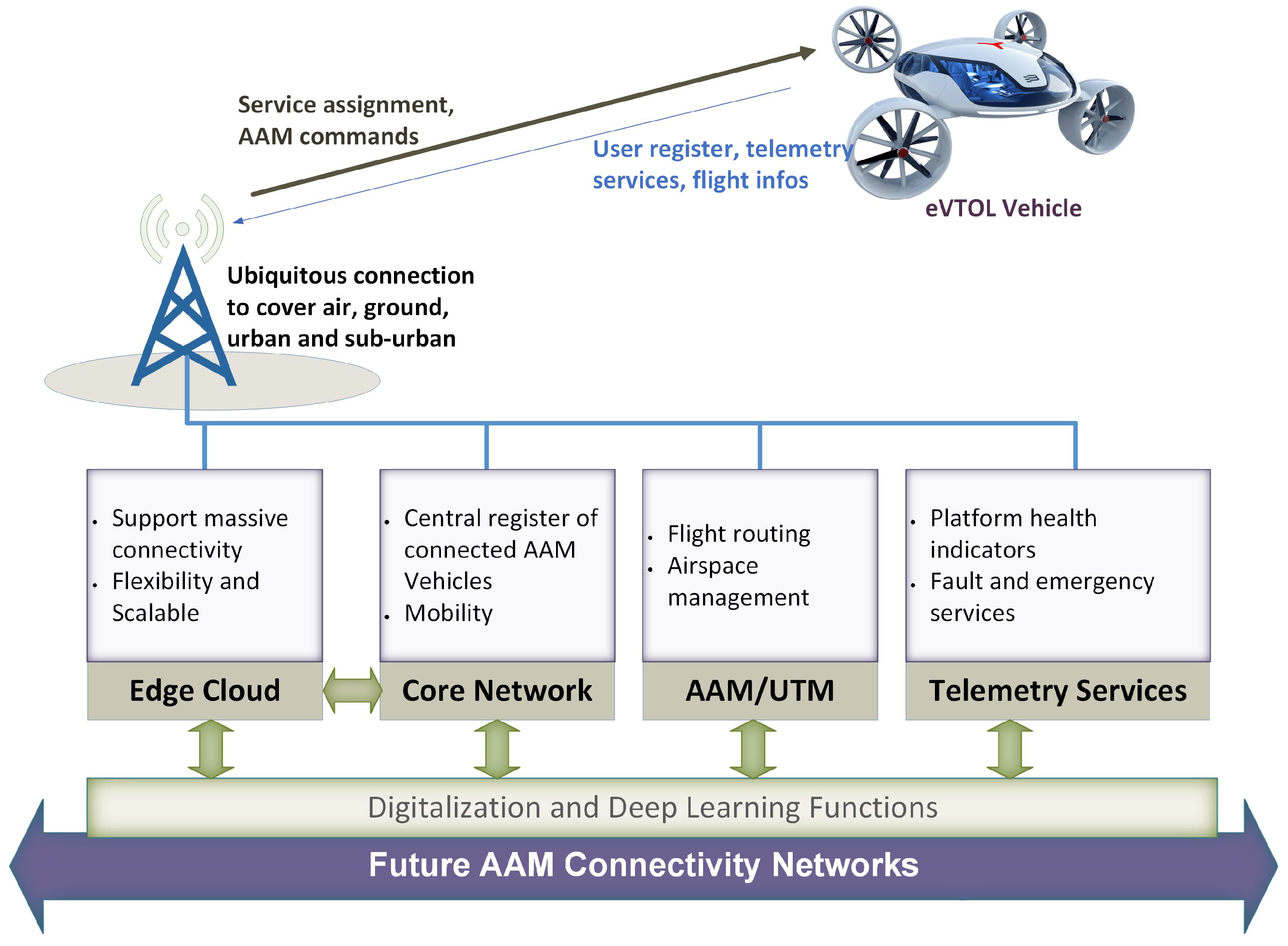
To address these challenges, industry leaders are working to develop advanced communication technologies, such as fifth-generation (5G) networks and satellite-based communication systems, that can support AAM operations [8]. Telecommunications providers will become a main backbone for eVTOL services due to their network reliability, low latency, and high-bandwidth services to ensure safe and efficient flight management and robust connectivity with other aircraft. Based on the functionalities and performance, the advanced communication system can be divided into edge cloud, core network, AAM-UTM [9], and telemetry services [10], as shown in Figure 1. A control data link will be responsible for the transmission of mission-critical commands to flying vehicles. This includes flight status, telemetry data, and navigation. A payload communication data link can handle the mission and passenger data, including web browsing and vehicle health, for predictive maintenance. On the other hand, BVLOS is the most critical challenge that impacts the safety of vehicles [11]. To further improve flight operations, there is a need to establish an integrated unmanned aircraft system traffic management (UTM). system that facilitates the processing of dense connected eVTOLs in the whole airspace. This systematic modeling helps to identify the entry of new, diverse eVTOLs into complex communication domains, along with enforcing safety measures to maintain safe and efficient service management, with new vehicle parameters, as shown in Table 1. Therefore, the AAM data ecosystem will also consist of service assurance and self-optimization, soft defined networks, and a digital twin that provide the necessary features for worldwide deployments [12].
The eVTOL vehicles will operate in lower altitudes within the coverage domains of ground base stations; the terrestrial cellular communication network 5G seems to be a capable of providing air-to-ground (A2G) connectivity for AAM [13]. The eVTOLs’ connectivity appears as a bulk of new users require certain features to support regular communications for data transmission along with navigational information required for routing eVTOLs between flying corridors. Advanced terrestrial networks, such as sixth-generation (6G) technology, can take advantage of the latest evolutions in 5G end-to-end slicing, artificial intelligence (AI), and the Internet of Things (IoT) [14,15]. Advanced communications technology can find the position of eVTOLs and hopefully support the management of their operations with the help of extended coverage and services [16]. Sixth-generation communications will play an important role for eVTOL aircraft, providing near-real-time data link connectivity to keep city skies safe while the volume of flying vehicle traffic grows [17]. This advanced communications technology will be crucial for situational awareness, air-to-air, and air-to-ground communication. In particular, advanced communications technology will help to achieve low-latency and high-throughput connections for in-flight passenger applications [18].
The communication networks of future air mobility systems must be highly reliable, secure, and able to handle large amounts of data in real time. These networks will need to support a variety of applications, including remote sensing, situational awareness, navigation, and communication between vehicles and ground-based control systems [19]. One of the key requirements for the air mobility communication network is low latency, which means that data must be transmitted quickly and efficiently. This is especially important for autonomous vehicles that need to make quick decisions based on real-time data. The network must also be able to handle a large number of devices, including sensors and other types of devices that will be used to support the operation of air mobility vehicles. In this regard, this paper introduces new air mobility challenges and proposes frameworks of aerospace integration-based connected systems that could be compatible with existing and future infrastructure, rather than rebuilding the underlying digital chain. This can be more realistic for separate economic sectors to come together and less challenging from a technical perspective. This will help to facilitate the entry of new diverse vehicles into an already complex communications environment, along with establishing robust safety features to meet evolving standards.
Finally, the network must be able to handle the unique requirements of air mobility, such as high-altitude communications, the need to operate in remote and challenging environments, and the ability to switch seamlessly between different types of communication technologies. Overall, the future of air mobility will depend heavily on the development of robust and reliable communication networks that can support the safe and efficient operation of these vehicles. As new technologies emerge, it will be important to continue to innovate and improve these networks to meet the evolving needs of the industry.
2. AAM Infrastructure and Ecosystem Methodology
AAM has the potential to revolutionize transportation by providing faster, more efficient, and more environmentally friendly options for commuters and logistics [20]. To support the growth of AAM, an infrastructure and ecosystem are needed, of which some of the key components shown in Figure 2, and are identified as follows:
- Autonomy: A key component of advanced air mobility vehicles, which are designed to operate with varying degrees of automation. Autonomy can refer to a range of capabilities, from basic automation such as automatic takeoff and landing, to fully autonomous flight without a human pilot on board. The complexity of UAM operations and the extent to which operations depend on automated systems, referred to as automation reliance, play a crucial role in the development of the UAM ecosystem. Progress in the UAM ecosystem, facilitated by urban mobility levels (UMLs) [21], is contingent upon satisfying the unique integration requirements related to aircraft, airspace, and the community for each UML.
- Vertiport Infrastructure: Vertiports are the equivalent of airports for eVTOLs. These facilities are designed to provide a seamless transition between ground and air transportation. They may include features such as charging stations, maintenance facilities, and passenger waiting areas. Vertiport [22] facilities will be critical to the success of the emerging air taxi industry, which is expected to provide on-demand aerial transportation services to passengers and cargo in urban and suburban areas [23]. To support the operation of vertiports, a robust communication infrastructure will be essential. This infrastructure will enable communication between the vertiports and the eVTOL aircraft, as well as between the eVTOL aircraft themselves [24]. It will also support the exchange of data and information between the vertiports and other stakeholders, such as air traffic controllers, local governments, and passengers. At present, two passenger transportation models exist, each serving specific needs and functions. The first model revolves around vertistops, designed for short hops within urban locations to facilitate easy mobility. These stops can be installed on existing infrastructure, such as building tops or unused spaces. The second model is suitable for intracity travel within a 150-mile range, aiming to restore regional air services discontinued by traditional airlines due to cost constraints. Longer-range eVTOLs may require vertiports, comprising stand-alone terminals, maintenance repair and overhaul (MRO) operations, and charging facilities. These could be established at existing airports, greenfield sites, or even on top of other existing infrastructure [25]. eVTOLs offer a faster mode of transportation, and could potentially replace cars, regional trains, or buses. Many developers and manufacturers are focusing on making eVTOLs affordable and accessible to a wider audience [24]. It is probable that vertiports will have to accommodate several eVTOL aircraft simultaneously, but they may require significantly less space than vertihubs. These ports could have fast charging/refueling systems, basic security checkpoints, and the capability to carry out minor MRO operations. However, they may not have parking spaces for long-haul eVTOLs or fully fledged MRO stations. Finally, the development of a robust communication infrastructure will be critical to the success of the emerging air taxi industry and the safe and efficient operation of eVTOL aircraft in urban and suburban areas.
- Charging Infrastructure: eVTOLs require reliable and accessible charging infrastructure. This may include charging stations at vertiports, along flight routes, and in other public areas. Charging stations are needed to recharge the batteries of electric AAM vehicles. Air traffic management systems are necessary to ensure the safe and efficient movement of AAM vehicles through the airspace. Communication networks are needed to transmit data between AAM vehicles and ground-based systems, such as air traffic control and vehicle charging infrastructure.
- Navigation and Surveillance: The Global Positioning System (GPS) is a satellite-based navigation system that provides accurate position information to AAM vehicles. GPS is a widely used navigation technology, and is reliable and accurate. Moreover, ADS-B (Automatic Dependent Surveillance-Broadcast) is a system that allows AAM vehicles to transmit and receive real-time position and flight information to other aircraft and air traffic control. ADS-B can improve situational awareness and help to prevent collisions between AAM vehicles [26]. ADS-B uses GPS technology to determine the precise location of an aircraft, and then broadcasts that information to ground stations and other nearby aircraft. This technology enables air traffic controllers to monitor the movement of aircraft more accurately and efficiently than traditional radar-based systems [27]. It also allows pilots to see the position of other aircraft in the area, reducing the risk of collisions and improving situational awareness. ADS-B is becoming increasingly popular as a surveillance tool for air traffic control due to its accuracy and reliability. In fact, many countries have mandated that all aircraft must be equipped with ADS-B transponders in order to fly in their airspace.
- Sensor and Sensing: Light detection and ranging (LiDAR) is a technology that uses laser pulses to measure distance and create a 3D map of the environment. LiDAR can be used to detect and avoid obstacles in the airspace, such as buildings, trees, and other AAM vehicles. The payload capacity of AAM vehicles varies depending on the type and size of the vehicle, as well as the range and mission requirements. Small electric AAM vehicles, such as drones and VTOL vehicles, typically have a lower payload capacity of a few hundred pounds or less. Larger AAM vehicles, such as air taxis and passenger drones, can have a higher payload capacity of several thousand pounds or more.
- Safety: AAM vehicles will require regular maintenance and inspection to ensure they are in safe operating condition, and to identify and address any potential safety issues. The interconnection between social, safety, and regulatory challenges of AMM is closely tied to the certification and policies governing the operation of UAM vehicles set by regulatory bodies [28].
- Operation: Incorporating UAM operations into the National Airspace System, particularly in the vicinity of major airports, presents a significant challenge [29]. To operate AAM vehicles safely and efficiently, appropriate infrastructure and airspace management systems will need to be established. This may include dedicated landing pads or vertiports, as well as airspace corridors and traffic management systems, to ensure safe separation between AAM vehicles and other aircraft.
- Communications Infrastructure: One of the challenges of AAM communications is the need to support a variety of different communication technologies and protocols, including voice, data, and video communications. AAM vehicles may use satellite-based communications, cellular networks, or dedicated communications networks to transmit information and communicate with ground operators and other vehicles [30]. One important aspect of the communication infrastructure will be the use of 5G technology, whose networks offer high-bandwidth, low-latency connectivity, which will be critical for supporting the real-time communication and data exchange required for the safe and efficient operation of eVTOL aircraft. Another important aspect of the communication infrastructure will be the use of unmanned traffic management (UTM) systems [31]. These systems will enable the tracking and management of eVTOL aircraft in urban airspace, helping to prevent collisions and ensure safe operations. UTM systems will rely on real-time data from eVTOL aircraft, as well as data from ground-based sensors and other sources.
2.1. Air Mobility Vehicle Design
The AAM industry is still in its early stages, but several companies and organizations are working to develop and test eVTOL aircraft. These vehicles are designed to be faster, safer, and more efficient than traditional helicopters and airplanes. They use electric propulsion systems, advanced materials, and autonomous technologies to provide a new level of mobility that can transform transportation in the coming years. In the future, air mobility vehicles will be designed to provide efficient and fast transportation in urban environments, particularly for short-to-medium distances, as shown in Table 2. Here are some of the different types of vehicles [32]:
- Electric Multicopters: These are small, multirotor aircraft that use electric motors for propulsion. They have vertical takeoff and landing capabilities, which makes them suitable for operating in confined spaces. They typically have a range of around 50 km and a payload capacity of up to 100 kg.
- Hybrid Tiltrotors: These are aircraft that use a combination of fixed wings and rotors that can tilt to provide both vertical and horizontal flight. They are capable of longer ranges, up to 400 km, and can carry heavier payloads of up to 1000 kg.
- Electric Fixed-Wing Aircraft: These are aircraft that use fixed wings and electric motors for propulsion. They require a runway for takeoff and landing, and have a range of around 100 km. They are suitable for carrying payloads of up to 500 kg.
- Hydrogen Fuel-Cell Multicopters: These are similar to electric multicopters, but they use hydrogen fuel cells for power instead of electric batteries. They have a longer range of up to 200 km and can carry payloads of up to 150 kg.
- Gasoline Combustion Fixed-Wing Aircraft: These are similar to electric fixed-wing aircraft, but they use gasoline combustion engines for power. They are capable of longer ranges, up to 500 km, and can carry heavier payloads of up to 1000 kg.
2.2. Vertiport Infrastructure Approach
Vertiport infrastructure acts as a vital link in the UAM ecosystem, providing landing and takeoff points for these advanced aircraft and facilitating the efficient movement of people and goods. Vertiport infrastructure is designed with a clear focus on functionality, safety, and efficiency [33]. These state-of-the-art facilities are strategically located within urban areas, ensuring accessibility and connectivity to key destinations. Vertiports are equipped with advanced landing pads, charging stations, and maintenance facilities to support the operations of eVTOL aircraft. Furthermore, cutting-edge air traffic management systems and ground infrastructure enable the seamless connectivity and integration of these aerial vehicles into existing transportation networks. Urban Air Mobility has emerged as a visionary solution to address the challenges of transportation in densely populated cities. By utilizing low-altitude airspace, UAM envisions a network of eVTOL aircraft, providing quick, efficient, and ecofriendly transportation options. These vehicles, often referred to as “flying taxis”, can transport passengers and cargo between vertiports strategically placed throughout urban areas. The newly unveiled vertiport serves as a crucial milestone in the development of AAM, providing a physical space where the concept can be demonstrated, experienced, and understood. Designed as a hub for AAM operations, the vertiport not only showcases the possibilities of future transportation, but also acts as a catalyst for collaboration among city officials, regulators, and private companies invested in AAM technology. The vertiport initiative also aims to foster collaboration between public and private sectors. By bringing together city officials, regulators, technology companies, and aviation experts, the vertiport becomes a space for dialogue, knowledge sharing, and the development of necessary regulations and policies. These partnerships are crucial for the successful integration of UAM into existing transportation networks and ensuring public safety. The vertiport infrastructure represents the physical embodiment of the urban air mobility concept, showcasing the potential of UAM to transform urban transportation. By integrating cutting-edge technology, sustainability principles, and collaborative partnerships, vertiports create a foundation for a future where air travel becomes an integral part of our lives.
2.3. Air Mobility Ecosystem
The Air Mobility Ecosystem refers to the infrastructure, technologies, and services that support the safe and efficient operation of air transportation. The ecosystem presents many challenges and opportunities for stakeholders, including government agencies, industry players, and consumers. Key challenges include ensuring safety and security, developing regulatory frameworks to govern new technologies, and addressing environmental and social concerns. However, the air mobility ecosystem also presents many opportunities, including reducing travel time, operation, improving access to remote areas, and reducing congestion and emissions [34]. The aircraft in a AAM ecosystem can include eVTOLs for commuting and delivering supplies within the urban area, and the police department can use them for surveillance and security to decrease the crime rate in the city; moreover, eVTOLs equipped with fire extinguishers can be used to eliminate fires in places that are unreachable to the fire and safety department. Providing fair and equal access to airspace may be compromised by AAM operations at scale [35]. It is possible that AAM operation will monopolize access to airspace and exclude other operators as a result of rapid growth. Thus, a new AAM infrastructure ecosystem needs to be in place to enable full capability. The new framework with infrastructure is always open to further enhancements, such as including different types of urban mobility vehicles and defining new vertiport locations by considering current transportation behavior and needs. Developed infrastructure is essential for the initial operation of AAM passenger transport. There will be a need for infrastructure providers to develop the physical infrastructure necessary to support the operation of eVTOLs. This could include landing pads, maintenance facilities, and other types of infrastructure. Due to technological changes, the technologies and systems dedicated to AAM services are expected to change over the coming years. On a technical level, the aspects of AAM expected to be integrated are technology and infrastructure. In addition to physical and digital infrastructure, the AAM ecosystem involves various stakeholders, such as AAM service providers, vehicle manufacturers, airspace regulators, local government agencies, and customers. These stakeholders must work together to ensure safety, reliability, and accessibility of the AAM system. One key aspect of the AAM ecosystem is the integration of various technologies. For example, AAM vehicles may use electric or hybrid-electric propulsion systems, have autonomous capabilities, and incorporate advanced sensors and communication systems. The integration of these technologies is critical for AAM to be sustainable and efficient.
Overall, the development of the AAM infrastructure and ecosystem is an ongoing process that requires collaboration among various stakeholders, investment in new technologies and infrastructure, and effective regulatory frameworks [36]. As AAM continues to evolve, it has the potential to transform the way people and goods are transported in urban and suburban areas, offering a faster, more efficient, and environmentally friendly alternative to ground-based transportation.
2.4. Business Models and Barriers
There are various business models that could be translated into use cases for commercializing AAM services from private aircraft sales to fleet sales and leasing options. The main technical barrier for maintaining an open model that blends all AAM vehicles into communications services is the complex level of integration that influences the design and implementation of all systems in the ecosystem. This requires a clear vision on the acceptance of newly introduced AAM vehicles and the clarification of airspace segments for their operation. Another barrier could be regulations imposed by governments and how they are reflected into the daily management of operations and services. AAM vehicles in urban domains can be a serious security threat, and the scope of deployment will continue to evolve over the coming years along with the legal legislation.
2.5. Data Management Platform
To implement AAM operations, an automated AAM-ATM system must be established to accommodate high volumes of flight data in tightly uncontrolled and controlled airspace. The integration of eVTOLs into the existing transportation network will be a complex process that will require careful planning and coordination among various stakeholders. One of the challenges will be the integration of eVTOLs into an already complex communications environment such as a digital twin platform to meet security and safety standards [37]. This will require the development of new communication protocols that allow eVTOLs to communicate with other aircraft, as well as ground-based infrastructure such as air traffic control towers. The management platform is the key element that can provision all data communications functionality and operations by creating unprecedented technical features and quality of experience to aircraft, including ATM [38]. The eVTOLs will need to commit to the same regulations and policies enforced on manned aircraft systems, considering air traffic management for any rerouting or emergency landing actions. Since AAM systems are anticipated to be AI-driven machines using deep learning algorithms for decision making, the key performance indicators (KPI) imposed by the ATM system are expected to be so strict, especially for the response time. Therefore, all AAM operations will be completely digitized without any human intervention to support the most reliable operations and reduce/omit the occurrence of any system failure.
Figure 3 illustrates the various components of the AAM data communication system. The ground-based control station is the central hub for managing AAM operations, communicating with the air traffic management center and the AAM vehicle. The network operations center provides connectivity between the ground-based infrastructure and the AAM vehicle, facilitating communication with AAM passengers and cargo. The AAM vehicle is equipped with communication equipment that allows it to transmit and receive data with the ground-based infrastructure and the AAM passengers and cargo. This functional diagram can be modified to represent specific AAM communication systems and scenario. This digitization will include data collection, data processing, mapping, and data classification, which belong to the digital twin family [9]. In such a model, quality and service assurance processes should be embedded with service-level management entities to help identify any errors within the mobile infrastructure and the alternative options for service recovery. Validation and self-management contribute to the verification of system reliability and self-optimization of AAM operations [39]. Deep machine learning provides the prediction mechanism that scans the entire range of available constraints originating from different data sources. Those predictions are correlated with other counters from real-time data to perform adaptations in different communication technologies, such as long-term evolution (LTE), or advanced communications, such as 5G or 6G, to support UTM decisions whenever needed [40].
Similarly, based on the data engine outputs, the management engine can take actions to optimize resources and improve system performance. For example, it may adjust the allocation of computing resources to ensure that critical services have sufficient resources to operate effectively. It may also initiate service-healing actions to address issues that arise during operation, such as failures or performance degradation. AAM data management can reflect the influence of deep learning in managing connectivity platforms and flight systems by factoring functional and predicated analysis into network management decisions.
3. Connected Sustainability
Connected sustainability [41] refers to the integration of reliability principles and practices into the design, development, and operation of interconnected systems and networks for AAM. In addition, eVTOLs could also overload the network with massive data streams such as images or video. Although there are many solutions that could be used, such as tighter frequency reuse and wider channel access, advanced communications such as 6G are expected to employ a noncellular structure that requires more innovative solutions for eVTOL domains. Over the last few years, communications networking has tremendously evolved, driven by a sharp increase in the number of connected machines, data demands, and supported services. Therefore, designing a compatible network infrastructure that supports traffic demands in a cost-effective fashion will always be subject to the establishment of sustainability.
3.1. Advanced Connectivity
Air mobility connectivity and networking is crucial for the safe and efficient operation of aerial vehicles, especially as the number of these vehicles continues to increase. It allows for improved situational awareness and coordination between vehicles and ground-based operators, which can reduce the risk of collisions and other accidents. Additionally, air mobility networking enables the integration of aerial vehicles into the broader transportation system, allowing for new use cases and business models [42]. Air mobility networking involves various technologies such as radio frequency communication, satellite communication, and cellular communication. These technologies enable vehicles to transmit and receive data, including position information, flight plans, weather information, and other relevant data [43]. Additionally, air mobility networking also involves developing protocols that govern the exchange of information between vehicles, as well as between vehicles and ground-based networks. In fact, AAM vehicles rely on advanced avionics and communications technologies to communicate with air traffic control, ground operators, and other vehicles in airspace. This challenge is further fed into mission critical applications such as disaster recovery operations, where real-time data transmission is a prerequisite.
Using flying ad hoc networks (FANET) is one possible solution to overcome failed communications in beyond visual line of sight (BVLOS) scenarios. FANET is a network of eVTOLs that can communicate with each other to relay data between the ground control station and the distant vehicle [44,45]. FANET works by creating a mesh network of eVTOLs that fly in close proximity to each other, forming a network that can transmit data between the ground control station and the distant vehicle. The eVTOLs in the FANET act as routers and can route data through the network to the destination, even if the direct link between the ground control station and the distant vehicle is lost.
HAP-based communications are usually used for large geographical areas and may not be an appropriate or an economic solution to support vehicles in dynamic movements. On the other hand, low-altitude platforms (LAPs) such as eVTOL aircraft can be easily deployed to extend network coverage or replace cellular communications during disastrous events [17]. Therefore, an advanced AAM communication framework needs to support both air-to-air and air-to-ground data links. AAM vehicles have the flexibility to fly at different altitudes and provide coverage extensions to various angles, making their air-to-air short wireless links more efficient, especially in urban domains [46].
3.2. ATC Communication Requirements
In traditional manned aviation, air traffic management (ATC) directs aircraft on the ground and through controlled airspace, and can provide advisory services to aircraft in noncontrolled airspace. The primary purpose of ATC worldwide is to prevent collisions, organize and expedite the flow of air traffic, and provide information to support the pilots. Each aircraft should be authorized by ATC prior to flight. AAM vehicles are supposed to acquire such authorization and services from ATC initially, and from other services such as UTM in the future [47], when the number of airborne AAM vehicles increases, or when they are remote-controlled or fully autonomous. In traditional aviation, there are two chains of communication between an aircraft and a ATC center/tower: the analog link and the digital data link. Figure 4 shows the digital and analog chains in an AAM system. The AAM avionics suite includes flight data computers that process digital data from the AAM vehicle’s sensors and other systems, and output digital data for control and navigation. The control center receives and processes the digital data, and sends commands to the AAM vehicle. The AAM sensors include various analog sensors, such as accelerometers and gyroscopes, that measure physical parameters and convert them into electrical signals. These signals are then amplified and converted to digital data using analog-to-digital converters (ADCs). This digital data are then transmitted to the control center for processing. This diagram can be modified to represent specific AAM systems and scenarios. The analog link is used for aeronautical voice communication between pilot and air traffic controller. This link utilizes a dedicated aeronautical very-high-frequency (VHF) band (118–137 MHz) for line of sight communication, or a high-frequency (HF) band (3–30 MHz) for long-distance communication. Voice communications are also conducted over voice satellite (Inmarsat, Globalstar, or Iridium), usually in oceanic or remote areas. The VHF band has two variants of channel spacing at the level of wireless link; the 25 kHz channel spacing and 8.33 kHz channel spacing. It uses amplitude modulation (AM): predominantly double sideband (DSB) with full carrier on VHF, and single sideband (SSB) with suppressed carrier on HF. Voice radio is the standard method of communication between the pilot and ATC [48].
The digital data link means the transmission of information in the form of short messages between aircraft and ground stations. It utilizes the same aeronautical VHF band as used by the analog link. It is based on the VHF Data Link (VDL) Mode 2 standard for transmission of Aircraft Communication Addressing and Reporting System (ACRAS) or controller–pilot data link communications (CPDLC) messages [49]. ACARS and CPDLC are two methods for exchanging messages between an aircraft and ground stations. ACARS was invented prior to CPDLC, and is used for communication between pilots (and their aircraft), air traffic controllers, and the airline operations center, as well as for general pilot operations (e.g., receiving weather reports), while CPDLC, as its name suggests, is dedicated to the transmission of flight-related messages between aircraft and ATC. Both methods can be used over VHF, HF, or satellite links.
3.3. Reliable Operations and Services
Enabling a new urban aviation transport system is a big challenge with many prerequisites, such as the management of convergent AAM services, monitoring the airspace traffic, providing a general communication system that can connect all flying vehicles, and integrating safety-related entities that reduce or prevent any human/machine errors [50]. The existing eVTOL traffic management (UTM) platforms can support the planning and execution of vehicle operations with full compliance to the applicable legislation. This means that specialized government authorities can track and manage vehicle activities on a real-time basis, or even access the history of their previous journeys [51]. Considering urban areas, AAM services are challenged by the highly dynamic topology of airspace, different speeds and sizes of vehicles, and heterogeneous quality of service (QoS) requirements (e.g., downlink/uplink, latency, etc.). Therefore, integrating the UTM platform into the core/edge data centers of advanced communication networks such as 5G or 6G will significantly reduce the time delays experienced when data are transferred between those systems separately. It will also allow for the combination of vehicle telemetry data with routing information to improve the safety and reliability of vehicle operations. This integration will solve key challenges faced by content-aware cellular-connected aerial platforms, including virtualized radio resource sharing and management between aerial platforms and terrestrial systems. This happens due to the fact that both UTM and radio management services are processed concurrently by the same hosting platforms. In addition, there are proofs of concepts initiated by operators and airspace data markets to explore rebuilding the whole airspace and network infrastructure using Blockchains, [52]. The goal is to improve supply chain management, improve the privacy of sensitive data, prevent identify theft, and much more. Within unmanned aviation, data flight chains are used in managing the record of separate data as well as fleets to assure that the logger preserves all logs of actions [53]. Obviously, this requires migrating AAM components into virtual automated applications that comply with cloudification concepts and cloud-based network segmentation. The integration of UTM architecture with ground cellular networks seems to be a mandatory technical requirement ahead of deploying eVTOL vehicles in urban domains. Autonomous flight vehicle operation is expected to be transparent to UTM providers and other airspace services.
4. Aeronautical Communications Architecture
There are several existing aircraft communication systems that are used in the aviation industry today. These systems enable communication between the cockpit and air traffic control, as well as between aircraft and ground-based maintenance and operations personnel. A legacy ATM encompasses all systems that assist aircraft to depart from an aerodrome, transit airspace, and land at a destination aerodrome. However, ATM systems lack the scalability and interfaces to support the unique needs of AAM operations, specifically AAM vehicle operations. On the other hand, UTM handles traffic management for AAM vehicles, but also complements legacy ATM systems, allowing for the exchange of data between AAM vehicles and manned-aircraft-supporting platforms. Regarding the AAM ecosystem, there are several basic data sources that UTM will need to integrate to ensure the safe and efficient movement of the AAM vehicle. The data could originate from 6G radio access networks, AAM vehicle service providers, AAM vehicle fleets, weather forecasting, surveillance systems, etc. This information is further processed through artificial intelligence (AI) to determine the exact AAM vehicle location and relevant traffic managements for that airspace. AAM communications infrastructure is designed to provide services to predefined sets of users with well-known capacity and key performance indicator (KPI) requirements. Although 5G lays down the basic functionalities at the base station for AAM vehicle connectivity, it is sometimes impossible, or prohibitively expensive, to provide full support to AAM vehicle domains. The forthcoming communications infrastructure can overcome these physical constraints using newly designed technologies and features that provide extended coverage domains over the ground and the sea and throughout the sky to seamlessly integrate AAM vehicles into the network infrastructure. Early alignment between infrastructure and technology in the AAM industry is essential to the growth of this emerging industry. The industry and public attention are largely focused on the vehicles and their operations. However, attention is shifting towards maintenance and support services for AAM vehicles as a crucial component in enabling safe, efficient, and environmentally sustainable AAM transport. The AAM service will consist of several autonomous systems (delivery AAM vehicles, flying taxis, etc.) in the future that can be remotely commanded to perform assigned missions. Requesting a certain service from a AAM platform will be enabled via centralized register that offers such services and identifies them to local providers. To this end, services can be classified as separated vertical slices, probably with their own network core entities and near-user application servers. Although some AAM vehicles may support multiservice types and could have differed registers within the database, some will be only associated with one type of service or even be owned/operated by one service provider. The assignment scheme of services will be subject to the requested service type, enforced policies, available computational and radio resources, and performance metrics. A data-driven decision-making approach can be enabled via deep learning data analysis across all the monitored constraints, developing a more automated approach for service planning and management, both at strategic and tactical levels. On the other hand, future 6G networks need to be more focused on using reinforcement learning to understand and learn how to interact with AAM vehicles considering requested services and connectivity factors. In Figure 5, the proposed AAM framework shows interaction with the communication network for safe AAM vehicle landing at an airport and later movement to a gate. For example, in the context of a vehicle-assisted communications network, the whole communication systemwill be administrated by a data management platform to achieve the dynamic and flexible allocation of computational and radio resources with minimized power consumption to facilitate the handover process [17]. AAM vehicles will need to communicate with air traffic control (ATC) to receive clearances, flight plans, and other information necessary for safe operation in airspace. Communication with ATC will be critical to avoid conflicts with other aircraft and ensure that AAM vehicles are operating in accordance with existing regulations. AAM vehicles may need to communicate with each other to avoid collisions and ensure safe separation in airspace. Vehicle-to-vehicle communication can enable real-time sharing of information such as position and speed to enable the safe and efficient operation of AAM vehicles. AAM vehiclesmay need to communicate with ground-based infrastructure, such as landing pads or vertiports, to receive information on available space and conditions for landing. Infrastructure communication can also enable the remote control of ground-based infrastructure to facilitate the efficient movement of AAM vehicles. In the event of an emergency, AAM vehicles will need to communicate with ground-based personnel, including emergency responders, to receive assistance and coordinate rescue efforts. Emergency communication systems will need to be reliable and efficient to enable rapid response and ensure the safety of passengers and crew.
5. Future Communications Infrastructure
Fifth-generation networks leveraged the concept of networking into the new automated slices of private networks that provide dedicated services to specific sites. Sixth-generation networkswill further leverage their infrastructure into chains of separated reconfigurable and self-automated private networks that interconnect with each other through clouds [8]. This network will be built on top of a blockchain with back-end elementsin the form of Tactile Internet. Tailoring to AAM, AAM vehicle management could be performed in two modes; “Localized” and “Centralized”.
- In Localized Mode, the AAM vehicle connectivity and service management will be provisioned by the local geonetwork base station and core functionalities in collaboration with UTM entities. This mode is likely to occur when an AAM vehicle is flying within the local network boundaries. This interaction between AAM vehicles and local networks will reduce the end-to-end time delays incurred when processing the service assignment and access though large scale-networks, similar to edge computing models in 5G. Therefore, the AAM vehicle’s association with the local geonetwork will be terminated when the AAM vehicle conducts handover and registers with a neighboring subnetwork.
- In Centralized Mode, the AAM vehicle connectivity is provided by the local network resources (e.g., base station, external connectivity to application server, etc.), while service provisioning is performed by core network entities. This mode assumes that the core network will be able to instantiate a logical overlaid networkthat overwrites all local network policies for AAM vehicle slices of service. This mode is triggered when a fleet of associated AAM vehicles swarm multiple local networks at the same time, or during emergencies when governing authorities take control over the entire airspace.
In the near future, AAM communications networks will tremendously evolve, driven by a sharp increase in connected machines, data demands, supported services, and the advent of 6G [54]. Designing a compatible network infrastructure that supports traffic demands in a cost-effective fashion will be always subject to network generation.A main challenge in providing connectivity to low-flying AAM vehicles through future 6G networks arises from increased interference. Dense network infrastructure and concurrent transmissions to ground-based users and AAM vehicles are the main sources for higher noise levels, especially on the downlink. In addition, AAM vehicles could also overload the network with massive data streams with limited channel bandwidth. One of the solutions may be much tighter frequency reuse and wider channel deployment. Therefore, it is necessary to define the equivalent of hexagonal cellular domain shapes for the AAM vehicle’s air layer or what could be the air coverage domains for ground base stations. The speed performance of the 6G network is expected to be 100 times faster than 5G, with enhanced reliability and wider network coverage; for more features and comparison between different technology, see Table 3. In addition, seamless mobility will be required for the system operation; thus, the handover prediction for dual connectivity in AAM vehicles is an important technique to ensure seamless communication between the aircraft and different base stations, which is essential for the safe and efficient operation of the AAM. In dual connectivity, the aircraft is connected to two base stations simultaneously, which provides redundancy and improves the reliability of communication link. One of the key challenges of handover is the need for real-time prediction, since AAM operations require immediate and reliable communication links [55].
6. Air-to-Ground Connectivity
One of the key parameters that could affect the implementation of AAM is the airborne communication system. The AAM vehicle will have to communicate with the ground station continuously to maintain an uninterrupted flow of data and UTM messages. Therefore, the AAM radio system will employ reconfigurable components that can perform ubiquitous connectivity with the ground mobile network without being restricted to specified technology [58]. The airborne system will employ an AI functionality that provisions the platform and allows communication with mobile networks [59]. The AAM vehicle will be registered with the 5G base stations using the same procedures for any connected machine, while requests to the ground network will be tagged with the AAM slice type to ease the recognition of the requested service. The airborne communication system will be extremely power-efficient to maintain functionality during longer flight times and to reduce the burden on the AAM power system. From an airborne communication perspective, the AAM will employ multiradio interfaces or become agnostic to base station technology. This means that mobile networks will be obligated to connect any AAM vehicles within their coverage area, regardless of the vehicle’s service provider or home mobile network. Although the final framework for enabling AAM communications will be decided by market holders, such decisions will influence the techniques and protocols used to operate AAM services. Air-to-ground communication systems are essential for ensuring safe and efficient communication between aircraft and ground stations. The information given in Table 4 includes communication systems, frequency ranges, and applications. Very-high-frequency (VHF) radios are the most widely used communication system in aviation. VHF radios operate in the frequency range of 118 MHz to 136 MHz, and are used for voice communication between pilots and air traffic control [45]. The Aircraft Communications Addressing and Reporting System (ACARS) is a digital communication system that enables pilots and ground personnel to exchange messages, including weather updates, flight plans, and maintenance information. ACARS can use VHF, HF, or satellite communication systems to transmit data.
AAM Connectivity Performance Analysis
The performance of AAM connectivity can be affected by several factors, such as the frequency spectrum used for communication, the type of data transmission protocol used, the location and number of communication nodes, the quality of service (QoS) requirements, and the presence of other wireless systems in the same frequency band. Since current and future networks are densely overlaid with base stations, AAM vehicles will be always connected to mobile networks, provided that those future networks will employ new generations of base stations with magnificent coverage capabilities. QoS communications system parameters refer to the configuration settings that determine how data are transmitted and received over a network to ensure a certain level of service quality. These parameters are critical to providing reliable and efficient communication services. The main QoS requirement parameters are shown in Table 5. For example, bandwidth determines the amount of data that can be transmitted over the network per unit of time, and latency refers to the delay between sending and receiving data for real-time communication applications. Thus, QoS systems can implement error correction techniques to detect and correct errors in transmitted data.
This dense network will support connectivity across cells while maintaining uninterrupted service for AAM vehicles. Handover is carried out when the signal received from base station falls below the threshold level and there is another base station within the visible range. For such air-to-ground connectivity, the priority will be always given to AAM vehicles flying in urban domains to avoid unnecessary handovers to neighboring rural domains. This type of procedure could be predefined on AAM vehicle platforms and enforced by terrestrial mobile networks. One of the main challenges for delivering video or data content is the real-time throughput for AAM connectivity and quality of service (QoS) parameters, including bandwidth, delay, packet loss, and jitter. In general, radio signal strength is the value measured by the AAM vehicle platform to establish connectivity with the nearest base station along its flight trajectory.
Data rate (R):
Delay (D):
Packet loss (PL):
Jitter (J):
Bit error rate (BER):
These equations can be customized and modified based on the specific QoS requirements of AAM communication systems.
For AAM flying vehicles, handover and mobility management are critical components of the communication system. As the vehicle moves through the airspace, it needs to seamlessly switch between communication links to ensure uninterrupted connectivity.
Handover initiation threshold (HIT):
Handover hysteresis (Hys):
Reference signal received power (RSRP):
Effective signal-to-noise ratio (SNR):
Handover margin (HM):
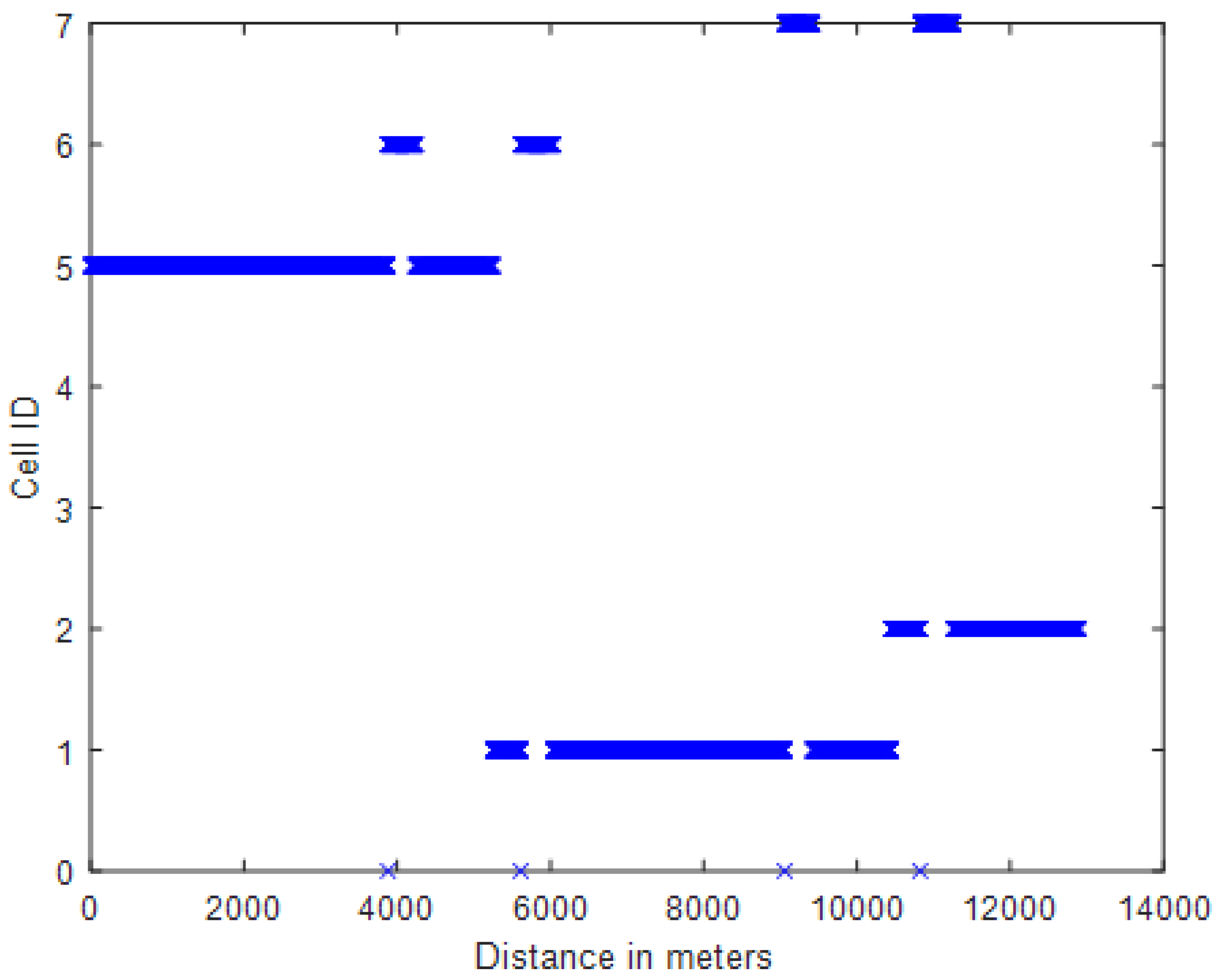
HIT refers to the signal strength threshold at which a handover is initiated. Hys refers to the hysteresis value that determines how much the signal strength should differ from HIT to trigger a handover. RSRP is the received signal strength of the reference signal. PRS refers to the received power of the reference signal. NRS is the noise floor of the reference signal. N0 is the noise floor of the receiver. SNReff refers to the effective signal-to-noise ratio of the received signal. Psig is the received power of the signal. Iinterf is the interference power. HM is the handover margin, which is the difference between the current RSRP and the target RSRP for the new cell. AAM vehicles can benefit from using both the received signal strength indicator (RSRP) and the received signal quality (RSRQ) to make handover decisions. RSRQ provides information about the quality of the signal, which can be used to prioritize certain links over others. AAM vehicles will experience some handovers while traveling through these areas, as shown in Figure 6. The simulation scenario consists of seven cells on the ground covering the areas around the flight trajectory. Each cell has three directional antennas, downtilted 120 degrees, with one main lobe (facing the ground) and two sidelobes (facing the sky). The AAM vehicle connects to the cells through these sidelobes. The figure also shows the connection of the AAM to different cells (Cell ID) throughout its 14 km journey (origin to destination/landing point) for a given speed, and the altitude is shown. The jumps in this figure represent the disconnection from the previous cell and connection to a new cell, known as a handover. At some point, we notice ping-pong handovers, which occur when the AAM vehicle is flying through null spaces of the two sidelobes of a single cell; the system parameters are summarized in Table 6.
Figure 7 shows the reference signal received power (RSRP), which is a measurement of the received power level in a communications network. The average power is a measurement of the power received from a single reference signal. The RSRP is of detected cells by the AAM vehicle throughout its 14 km journey.The null spaces between sidelobes of each cell are quite visible in this figure, where a sudden drop in RSRP is noticed. In order to mitigate the problem of redundant and ping-pong handovers, a new handover scheme for network infrastructure should be modified for the AAM vehicle. Figure 8 shows the same for a different route and at 1000 m AGL, and as it is seen, all seven cells are detected during the whole flight path. Figure 9 depicts the RSRP of the detected ground communication infrastructure at a height of 100 m above ground level (AGL). At low altitudes, the aircraft does not fall with the coverage area of any sidelobe of remote towers, and only detects the propagation of the closest tower.
It should be mentioned that in these simulations, we have not considered the multipath reflections from main beams or strong sidelobes of the serving or neighbor cells at low altitudes. However, at higher altitudes, these multipath reflections are too weak to be considered. In this section, we have simulated flights at altitudes of 500 m AGL and higher. The multihop wireless backhaul networks are a promising solution for providing reliable and cost-effective connectivity in areas where traditional wired backhaul is not feasible. As expected, the received power of a wireless communication signal decreases with increasing distance between the transmitter and the receiver due to the inverse-square law. Additionally, when the transmitter and the receiver are in motion relative to each other, the frequency of the signal can be shifted due to the Doppler effect. This can lead to a loss in signal quality and a decrease in the received signal power, which can further reduce the range of the communication link. To overcome these issues, various techniques can be used, such as increasing the transmitting power, using directional antennas, optimizing the frequency band and modulation scheme used, and employing signal processing techniques to mitigate the effects of fading and Doppler shift, as shown in Figure 9.
The velocity of the AAM vehicle can also affect the received signal distance, as higher speeds can cause Doppler shift and signal attenuation. Assuming a line-of-sight communication scenario, the following table provides a rough estimate of the signal received distances for different AAM vehicle velocities, assuming a transmitting power of 1 watt and a receiving sensitivity of −100 dBm, as shown in Figure 10. Finally, a connected eVTOL vehicle is designed to operate seamlessly and safely in complex urban environments, using advanced connectivity and communication technologies to enable efficient and reliable transportation for passengers and cargo.
7. Conclusions
The paper highlights the future flight vision for connected AAM vehicles, driven by advanced communications networks and operations approaches to support a new ecosystem framework and critical flight safety system. Future connectivity and operation challenges for AAM are predicted to be safely addressed to remove integration barriers across different coverage zones. A new framework that integrates advance communications with operation and infrastructure was proposed to comply with strict end-to-end KPI requirements of ultra-reliable, ultra-low-latency, and massive data-processing capabilities. The paper focused on technical challenges associated with new air-to-ground connectivity in AAM, including exploring new communication technologies and developing new handover techniques, as well as investigating new approaches to ecosystem management. It is suggested that sustainable AAM mobility scenarios require high standards of mobility to protect human life. This study suggests several promising future research directions to address the challenges associated with new air-to-ground connectivity. These include exploring new communication technologies and protocols to improve the reliability and efficiency of data transmission, developing new handover techniques to improve network performance, and investigating new approaches for ecosystem management.
Author Contributions
Conceptualization, S.A.-R.; writing—original draft preparation, S.A.-R.; writing—review and editing, A.T. and K.N. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Conflicts of Interest
The authors declare no conflict of interest.
References
- IEEE UAS Standards Tracking and Standards Development Related Research Needs; IEEE: Piscataway, NJ, USA, 2023; pp. 1–21.
- Chen, J. Integrated Routing and Charging Scheduling for Autonomous Electric Aerial Vehicle System. In Proceedings of the 2019 IEEE/AIAA 38th Digital Avionics Systems Conference (DASC), San Diego, CA, USA, 8–12 September 2019; pp. 1–7. [Google Scholar] [CrossRef]
- Bharadwaj, S.; Carr, S.; Neogi, N.; Topcu, U. Decentralized Control Synthesis for Air Traffic Management in Urban Air Mobility. IEEE Trans. Control Netw. Syst. 2021, 8, 598–608. [Google Scholar] [CrossRef]
- Namuduri, K.; Fiebig, U.C.; Matolak, D.W.; Guvenc, I.; Hari, K.; Määttänen, H.L. Advanced Air Mobility: Research Directions for Communications, Navigation, and Surveillance. IEEE Veh. Technol. Mag. 2022, 17, 65–73. [Google Scholar] [CrossRef]
- Gillani, R.; Jahan, S.; Majid, I. A Proposed Communication, Navigation & Surveillance System Architecture to Support Urban Air Traffic Management. In Proceedings of the 2021 IEEE/AIAA 40th Digital Avionics Systems Conference (DASC), San Antonio, TX, USA, 3–7 October 2021; pp. 1–7. [Google Scholar] [CrossRef]
- Bandelier, K.; Al-Rubaye, S.; Savazzi, S.; Namuduri, K. Vehicle-to-Vehicle (V2V) Unmanned Aerial Vehicle (UAV) Communication Based on Use Cases; IEEE: Piscataway, NJ, USA, 2023; pp. 1–24. [Google Scholar]
- Gómez Depoorter, D.; Kellerer, W. Designing the Air–Ground Data Links for Future Air Traffic Control Communications. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 135–146. [Google Scholar] [CrossRef]
- Cenk Ertürk, M.; Hosseini, N.; Jamal, H.; Şahin, A.; Matolak, D.; Haque, J. Requirements And Technologies Towards Uam: Communication, Navigation, And Surveillance. In Proceedings of the 2020 Integrated Communications Navigation and Surveillance Conference (ICNS), Herndon, VA, USA, 8–10 September 2020; pp. 2–15. [Google Scholar] [CrossRef]
- Brunelli, M.; Ditta, C.C.; Postorino, M.N. A Framework to Develop Urban Aerial Networks by Using a Digital Twin Approach. Drones 2022, 6, 387. [Google Scholar] [CrossRef]
- Ozpolat, M.; Al-Rubaye, S.; Williamson, A.; Tsourdos, A. Integration of Unmanned Aerial Vehicles and LTE: A Scenario-Dependent Analysis. In Proceedings of the 2022 International Conference on Connected Vehicle and Expo (ICCVE), Online, 8–10 September 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Zulkifley, M.A.; Subki, M.G.; Behjati, M.; Nordin, R.; Abdullah, N.F. Mobile Communications and Parachute Systems for Safe Beyond Visual Line of Sight (BVLoS) UAV Operation. In Proceedings of the 2022 IEEE 6th International Symposium on Telecommunication Technologies (ISTT), Johor Bahru, Malaysia, 14–16 November 2022; pp. 22–27. [Google Scholar] [CrossRef]
- Siewert, S.; Sampigethaya, K.; Buchholz, J.; Rizor, S. Fail-Safe, Fail-Secure Experiments for Small UAS and UAM Traffic in Urban Airspace. In Proceedings of the 2019 IEEE/AIAA 38th Digital Avionics Systems Conference (DASC), San Diego, CA, USA, 8–12 September 2019; pp. 1–7. [Google Scholar] [CrossRef]
- Ullah, Z.; Al-Turjman, F.; Mostarda, L. Cognition in UAV-Aided 5G and Beyond Communications: A Survey. IEEE Trans. Cogn. Commun. Netw. 2020, 6, 872–891. [Google Scholar] [CrossRef]
- Bhat, J.R.; Alqahtani, S.A. 6G Ecosystem: Current Status and Future Perspective. IEEE Access 2021, 9, 43134–43167. [Google Scholar] [CrossRef]
- Ziegler, V.; Yrjölä, S. How To Make 6G a General Purpose Technology: Prerequisites and value creation paradigm shift. In Proceedings of the 2021 Joint European Conference on Networks and Communications 6G Summit (EuCNC/6G Summit), Porto, Portugal, 8–11 June 2021; 2021; pp. 586–591. [Google Scholar] [CrossRef]
- Al-Rubaye, S.; Al-Dulaimi, A.; Ni, Q. Power Interchange Analysis for Reliable Vehicle-to-Grid Connectivity. IEEE Commun. Mag. 2019, 57, 105–111. [Google Scholar] [CrossRef]
- Khan, M.A.; Qureshi, I.M.; Khanzada, F. A Hybrid Communication Scheme for Efficient and Low-Cost Deployment of Future Flying Ad-Hoc Network (FANET). Drones 2019, 3, 16. [Google Scholar] [CrossRef]
- Tang, F.; Kawamoto, Y.; Kato, N.; Liu, J. Future Intelligent and Secure Vehicular Network Toward 6G: Machine-Learning Approaches. Proc. IEEE 2020, 108, 292–307. [Google Scholar] [CrossRef]
- Basso, M.; Zacarias, I.; Tussi Leite, C.E.; Wang, H.; Pignaton de Freitas, E. A Practical Deployment of a Communication Infrastructure to Support the Employment of Multiple Surveillance Drones Systems. Drones 2018, 2, 26. [Google Scholar] [CrossRef]
- Keeler, J.N.; Verma, S.A.; Edwards, T. Investigation of Communications Involved in Near-term UAM Operations. In Proceedings of the 2019 IEEE/AIAA 38th Digital Avionics Systems Conference (DASC), San Diego, CA, USA, 8–12 September 2019; pp. 1–10. [Google Scholar] [CrossRef]
- Jordan, A.; Jaskowska, K.K.; Monsalve, A.; Yang, R.; Rozenblat, M.; Freeman, K.; Garcia, S. Systematic Evaluation of Cybersecurity Risks in the Urban Air Mobility Operational Environment. In Proceedings of the 2022 Integrated Communication, Navigation and Surveillance Conference (ICNS), Dulles, VA, USA, 5–7 April 2022; pp. 1–15. [Google Scholar] [CrossRef]
- Li, X. Repurposing Existing Infrastructure for Urban Air Mobility: A Scenario Analysis in Southern California. Drones 2023, 7, 37. [Google Scholar] [CrossRef]
- Hodell, G.; Dao, Q.; Homola, J.; Goodyear, M.; Kalush, S.; Swaroop, S.; Jun, Y. Usability Evaluation of Fleet Management Interface for High Density Vertiplex Environments. In Proceedings of the 2022 IEEE/AIAA 41st Digital Avionics Systems Conference (DASC), Portsmouth, VA, USA, 18–22 September 2022; pp. 1–7. [Google Scholar] [CrossRef]
- Schweiger, K.; Preis, L. Urban Air Mobility: Systematic Review of Scientific Publications and Regulations for Vertiport Design and Operations. Drones 2022, 6, 179. [Google Scholar] [CrossRef]
- Qiu, H.; Tian, J.; Yu, J. Improving Aircraft Maintenance Operations Through Model Based Definition Maintenance Support System. In Proceedings of the 2019 IEEE 1st International Conference on Civil Aviation Safety and Information Technology (ICCASIT), Kunming, China, 17–19 October 2019; pp. 125–130. [Google Scholar] [CrossRef]
- Valovage, E. Enhanced ADS-B Research. IEEE Aerosp. Electron. Syst. Mag. 2007, 22, 35–38. [Google Scholar] [CrossRef]
- Hegarty, C.J.; Chatre, E. Evolution of the Global Navigation SatelliteSystem (GNSS). Proc. IEEE 2008, 96, 1902–1917. [Google Scholar] [CrossRef]
- Gunady, N.I.; Patel, S.R.; DeLaurentis, D. A System-of-Systems Approach to Analyzing Future Advanced Air Mobility Cargo Operations. In Proceedings of the 2022 17th Annual System of Systems Engineering Conference (SOSE), Rochester, NY, USA, 7–11 June 2022; pp. 368–373. [Google Scholar] [CrossRef]
- Verma, S.; Dulchinos, V.; Wood, R.D.; Farrahi, A.; Mogford, R.; Shyr, M.; Ghatas, R. Design and Analysis of Corridors for UAM Operations. In Proceedings of the 2022 IEEE/AIAA 41st Digital Avionics Systems Conference (DASC), Portsmouth, VA, USA, 18–22 September 2022; pp. 1–10. [Google Scholar] [CrossRef]
- Gozalvez, J.; Sepulcre, M.; Bauza, R. IEEE 802.11p vehicle to infrastructure communications in urban environments. IEEE Commun. Mag. 2012, 50, 176–183. [Google Scholar] [CrossRef]
- Costa, J.; Matos, R.; Araujo, J.; Li, J.; Choi, E.; Nguyen, T.A.; Lee, J.W.; Min, D. Software Aging Effects on Kubernetes in Container Orchestration Systems for Digital Twin Cloud Infrastructures of Urban Air Mobility. Drones 2023, 7, 35. [Google Scholar] [CrossRef]
- Partheepan, S.; Sanati, F.; Hassan, J. Autonomous Unmanned Aerial Vehicles in Bushfire Management: Challenges and Opportunities. Drones 2023, 7, 47. [Google Scholar] [CrossRef]
- Preis, L.; Hornung, M. Vertiport Operations Modeling, Agent-Based Simulation and Parameter Value Specification. Electronics 2022, 11, 1071. [Google Scholar] [CrossRef]
- Lee, H.; Moolchandani, K.A.; Arneson, H. Demand Capacity Balancing at Vertiports for Initial Strategic Conflict Management of Urban Air Mobility Operations. In Proceedings of the 2022 IEEE/AIAA 41st Digital Avionics Systems Conference (DASC), Portsmouth, VA, USA, 18–22 September 2022; pp. 1–10. [Google Scholar] [CrossRef]
- Dulia, E.F.; Sabuj, M.S.; Shihab, S.A.M. Benefits of Advanced Air Mobility for Society and Environment: A Case Study of Ohio. Appl. Sci. 2022, 12, 207. [Google Scholar] [CrossRef]
- Patel, S.R.; Gunady, N.I.; Rao, A.K.; Wright, E.C.; DeLaurentis, D. Modeling Energy Infrastructure of Future Electric Urban Air Mobility Operations. In Proceedings of the 2022 17th Annual System of Systems Engineering Conference (SOSE), Rochester, NY, USA, 7–11 June 2022; pp. 382–387. [Google Scholar] [CrossRef]
- Almeaibed, S.; Al-Rubaye, S.; Tsourdos, A.; Avdelidis, N.P. Digital Twin Analysis to Promote Safety and Security in Autonomous Vehicles. IEEE Commun. Stand. Mag. 2021, 5, 40–46. [Google Scholar] [CrossRef]
- Schnell, M.; Epple, U.; Shutin, D.; Schneckenburger, N. LDACS: Future aeronautical communications for air-traffic management. IEEE Commun. Mag. 2014, 52, 104–110. [Google Scholar] [CrossRef]
- Matolak, D.W.; Sun, R. Air–Ground Channel Characterization for Unmanned Aircraft Systems—Part III: The Suburban and Near-Urban Environments. IEEE Trans. Veh. Technol. 2017, 66, 6607–6618. [Google Scholar] [CrossRef]
- Letaief, K.B.; Chen, W.; Shi, Y.; Zhang, J.; Zhang, Y.A. The Roadmap to 6G: AI Empowered Wireless Networks. IEEE Commun. Mag. 2019, 57, 84–90. [Google Scholar] [CrossRef]
- Matinmikko-Blue, M. Sustainability and Spectrum Management in the 6G ERA. In Proceedings of the 2021 ITU Kaleidoscope: Connecting Physical and Virtual Worlds (ITU K), Geneva, Switzerland, 6–10 December 2021; pp. 1–9. [Google Scholar] [CrossRef]
- Plass, S. Seamless networking for aeronautical communications: One major aspect of the SANDRA concept. IEEE Aerosp. Electron. Syst. Mag. 2012, 27, 21–27. [Google Scholar] [CrossRef]
- Neji, N.; de Lacerda, R.; Azoulay, A.; Letertre, T.; Outtier, O. Survey on the Future Aeronautical Communication System and Its Development for Continental Communications. IEEE Trans. Veh. Technol. 2013, 62, 182–191. [Google Scholar] [CrossRef]
- Sakhaee, E.; Jamalipour, A.; Kato, N. Aeronautical ad hoc networks. In Proceedings of the IEEE Wireless Communications and Networking Conference, WCNC 2006, Las Vegas, NV, USA, 3–6 April 2006; Volume 1, pp. 246–251. [Google Scholar] [CrossRef]
- Zhang, J.; Chen, T.; Zhong, S.; Wang, J.; Zhang, W.; Zuo, X.; Maunder, R.G.; Hanzo, L. Aeronautical AdHoc Networking for the Internet-Above-the-Clouds. Proc. IEEE 2019, 107, 868–911. [Google Scholar] [CrossRef]
- Djuknic, G.; Freidenfelds, J.; Okunev, Y. Establishing wireless communications services via high-altitude aeronautical platforms: A concept whose time has come? IEEE Commun. Mag. 1997, 35, 128–135. [Google Scholar] [CrossRef]
- Pongsakornsathien, N.; Gardi, A.; Bijjahalli, S.; Sabatini, R.; Kistan, T. A Multi-Criteria Clustering Method for UAS Traffic Management and Urban Air Mobility. In Proceedings of the 2021 IEEE/AIAA 40th Digital Avionics Systems Conference (DASC), San Antonio, TX, USA, 3–7 October 2021; pp. 1–9. [Google Scholar] [CrossRef]
- Towhidlou, V.; Al-Rubaye, S.; Tsourdos, A. LTE Handover Design for Cellular-Connected Aircraft. In Proceedings of the 2022 IEEE/AIAA 41st Digital Avionics Systems Conference (DASC), Portsmouth, VA, USA, 18–22 September 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Orye, E.; Visky, G.; Maennel, O. Analysing the Actual Use of Controller–Pilot Data Link Communications. Eng. Proc. 2022, 28, 18. [Google Scholar]
- Bae, J.; Lee, H.; Lee, H. A Study on Communication Technologies for Urban Air Mobility. In Proceedings of the 2022 13th International Conference on Information and Communication Technology Convergence (ICTC), Jeju Island, Republic of Korea, 19–21 October 2022; pp. 2235–2240. [Google Scholar] [CrossRef]
- Ho, F.; Geraldes, R.; Gonçalves, A.; Rigault, B.; Sportich, B.; Kubo, D.; Cavazza, M.; Prendinger, H. Decentralized Multi-Agent Path Finding for UAV Traffic Management. IEEE Trans. Intell. Transp. Syst. 2020, 1–12. [Google Scholar] [CrossRef]
- Al-Rubaye, S.; Tsourdos, A. Airport Connectivity Optimization for 5G Ultra-Dense Networks. IEEE Trans. Cogn. Commun. Netw. 2020, 6, 980–989. [Google Scholar] [CrossRef]
- Lei, K.; Zhang, Q.; Lou, J.; Bai, B.; Xu, K. Securing ICN-Based UAV Ad Hoc Networks with Blockchain. IEEE Commun. Mag. 2019, 57, 26–32. [Google Scholar] [CrossRef]
- Ansari, S.; Taha, A.; Dashtipour, K.; Sambo, Y.; Abbasi, Q.; Imran, M. Urban Air Mobility—A 6G Use Case? Front. Commun. Netw. 2021, 2, 729767. [Google Scholar] [CrossRef]
- Prados-Garzon, J.; Adamuz-Hinojosa, O.; Ameigeiras, P.; Ramos-Munoz, J.J.; Andres-Maldonado, P.; Lopez-Soler, J.M. Handover implementation in a 5G SDN-based mobile network architecture. In Proceedings of the 2016 IEEE 27th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), Valencia, Spain, 4–8 September 2016; pp. 1–6. [Google Scholar] [CrossRef]
- IEEE P1914.1/D5.0; IEEE Draft Standard for Packet-based Fronthaul Transport Networks. IEEE: Piscataway, NJ, USA, 2019; pp. 1–89.
- Mishra, D.; Vegni, A.M.; Loscrí, V.; Natalizio, E. Drone Networking in the 6G Era: A Technology Overview. IEEE Commun. Stand. Mag. 2021, 5, 88–95. [Google Scholar] [CrossRef]
- Zeng, T.; Semiari, O.; Saad, W.; Bennis, M. Performance Analysis of Aircraft-to-Ground Communication Networks in Urban Air Mobility (UAM). In Proceedings of the 2021 IEEE Global Communications Conference (GLOBECOM), Madrid, Spain, 7–11 December 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Cruz-Perez, F.; Hernandez-Valdez, G.; Ortigoza-Guerrero, L. Performance evaluation of mobile wireless communication systems with link adaptation. IEEE Commun. Lett. 2003, 7, 587–589. [Google Scholar] [CrossRef]
- ISO/IEC/IEEE 8802-11:2012(E) (Revison of ISO/IEC/IEEE 8802-11-2005 and Amendments); ISO/IEC/IEEE International Standard-Information Technology–Telecommunications and Information Exchange between Systems Local and Metropolitan Area Networks–Specific Requirements Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications. IEEE: Piscataway, NJ, USA, 2012; pp. 1–2798. [CrossRef]
Figure 1.
Overview of advanced air mobility connected system.

Figure 2.
Future AAM infrastructure framework.

Figure 3.
AAM data management platform architecture.

Figure 4.
AAM communication link chain.

Figure 5.
Air mobility communications scenarios.

Figure 6.
Handover of the flight path in advanced communication system.

Figure 7.
Multihop wireless backhaul network.

Figure 8.
Signal received power detected in ground infrastructure at a height of 100 m above ground level.
Figure 8.
Signal received power detected in ground infrastructure at a height of 100 m above ground level.

Figure 9.
Signal received power detected in ground infrastructure at a height of 500 m above ground level.
Figure 9.
Signal received power detected in ground infrastructure at a height of 500 m above ground level.

Figure 10.
Signal received distances for different AAM vehicle velocities.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
AAM characteristics.
| Parameter | Definition | Units |
|---|---|---|
| Range | Maximum distance an AAM vehicle can travel on a single charge or fuel load | km, mi |
| Endurance | Maximum time an AAM vehicle can remain airborne on a single charge or fuel load | h |
| Payload Capacity | Maximum weight an AAM vehicle can carry, including passengers and cargo | kg, lb |
| Speed | Maximum cruising speed of an AAM vehicle | km/h, mph |
| Altitude | Maximum flight altitude of an AAM vehicle | m, ft |
| Noise Level | Acoustic power level generated by an AAM vehicle during operation | dB |
| Energy Efficiency | Energy consumed by an AAM vehicle per unit distance or time | kWh/km, kWh/h |
| Charging Time | Time required to fully charge the battery of an AAM vehicle | h |
| Takeoff/Landing Distance | Minimum distance required for an AAM vehicle to take off or land | m, ft |
| Operational Cost | Total cost of operating an AAM vehicle, including maintenance and fuel/electricity costs | USD/h, USD/km |
| Ingress/Egress Time | Time it takes to board and disembark from the AAM vehicle | s |
| Pricing | Cost per passenger for AAM service | USD/, passenger |
| Network Design | Physical and operational infrastructure of the AAM network | N/A |
| Modal Transfer | Integration of AAM with other modes of transportation | N/A |
Table 2.
Different types of AAM vehicles.
| Vehicle Type | Range | Payload Capacity | Max Speed | Altitude |
|---|---|---|---|---|
| Electric Multicopter | 50 km | 100 kg | 160 km/h | 2000 m |
| Hybrid Tiltrotor | 400 km | 1000 kg | 300 km/h | 4000 m |
| Electric Fixed-Wing | 100 km | 500 kg | 200 km/h | 3000 m |
| Hydrogen Fuel-Cell Multicopter | 200 km | 150 kg | 120 km/h | 2500 m |
| Gasoline Combustion Fixed-Wing | 500 km | 1000 kg | 300 km/h | 5000 m |
| Parameter | 4G | 5G | 6G |
|---|---|---|---|
| Peak data rate | 1 Gbps | 20 Gbps | 1000 Gbps |
| User Data Rate | 10 Mbps | 100 Mbps | 1 Gbps |
| Peak Spectral Efficiency | 15 bps/Hz | 30 bps/Hz | 50 bps/Hz |
| Mobility | 350 km/h | 500 km/h | |
| Latency | 10 ms | 1 ms | 0.1 ms |
Table 4.
Air-to-ground communications systems.
| System | Frequency Range | Application |
|---|---|---|
| VHF | 118–136 MHz | Voice Communications |
| HF | 2–29.7 MHz | Long-Range Voice and Data Communications |
| UHF | 225–400 MHz | Line-of-Sight Voice and Data Communications |
| Satellite | Various | Beyond Line-of-Sight Voice and Data Communications |
| ADS-B | 978–1090 MHz | Aircraft Position Reporting and Traffic Information |
| ACARS | VHF, HF, or Satellite | Aircraft Communications Addressing and Reporting System |
Table 5.
QoS communications system parameters [60].
Table 5.
QoS communications system parameters [60].
| Parameter | Definition | Units |
|---|---|---|
| Latency | Round-trip time for data to travel between AAM vehicle and ground station | ms |
| Data Rate | Maximum amount of data that can be transmitted per second | Mbps |
| Reliability | Probability that data are delivered without errors or delays | % |
| Coverage | Area of service coverage provided by 5G network | km2, mi2 |
| Bandwidth | Range of frequencies available for communication | GHz |
| Mobility | Ability of AAM vehicle to maintain connectivity while moving | km/h, mph |
| Spectrum Efficiency | Amount of data that can be transmitted per unit of frequency spectrum | bps/Hz |
| Availability | Percentage of time that 5G network is operational | % |
| Security | Level of protection against unauthorized access or data breaches | N/A |
| Interference | Level of interference from other wireless devices or networks | dB |
Table 6.
Communication system parameters.
| Parameter | Value |
|---|---|
| No. of cells | 7 |
| No. of base stations | 7 |
| Flight distance | 14 km |
| No. of sidelobes | 2 |
| Sidelobe beamwidth | (18.15) degrees |
| Speed of the AAM vehicle | 30 m/s |
| Time to trigger (TTT) | 0.25 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Al-Rubaye, S.; Tsourdos, A.; Namuduri, K. Advanced Air Mobility Operation and Infrastructure for Sustainable Connected eVTOL Vehicle. Drones 2023, 7, 319. https://doi.org/10.3390/drones7050319
AMA Style
Al-Rubaye S, Tsourdos A, Namuduri K. Advanced Air Mobility Operation and Infrastructure for Sustainable Connected eVTOL Vehicle. Drones. 2023; 7(5):319. https://doi.org/10.3390/drones7050319
Chicago/Turabian StyleAl-Rubaye, Saba, Antonios Tsourdos, and Kamesh Namuduri. 2023. "Advanced Air Mobility Operation and Infrastructure for Sustainable Connected eVTOL Vehicle" Drones 7, no. 5: 319. https://doi.org/10.3390/drones7050319