


Advanced Air Mobility and Evolution of Mobile Networks

1
Orange Polska, 02-326 Warsaw, Poland
2
Division of Cybersecurity, Institute of Telecommunications, Faculty of Electronics and Information Technology, Warsaw University of Technology, 00-661 Warsaw, Poland
*
Authors to whom correspondence should be addressed.
Drones 2023, 7(9), 556; https://doi.org/10.3390/drones7090556
Submission received: 30 June 2023
/
Revised: 7 August 2023
/
Accepted: 18 August 2023
/
Published: 29 August 2023
(This article belongs to the Special Issue AAM Integration: Strategic Insights and Goals)
Abstract
:Advanced Air Mobility (AAM) is a promising field of services based on Unmanned Aerial Vehicles (UAVs), which aims to provide people and cargo transportation services in underserved areas. The recent advancements in the fields of aviation and mobile telecommunication networks have opened up multiple opportunities for the development of disruptive AAM applications. This paper presents the overview and identifies the major requirements of emerging AAM use cases to confront them with the features provided by the 5G System (5GS), which is commonly considered the key enabler in providing commercial AAM services. The major benefits, gaps, and issues regarding using 5GS to serve AAM operations are identified and discussed. Finally, the future perspectives for AAM services are outlined with a focus on the potential benefit that can be provided as the mobile network evolves towards 6G.
Keywords:
AAM; 5G; 6G; UTM; 3GPP; UAS; UAV; drone; AI; mobile networks; mobile services; requirements; architecture; applications1. Introduction
The Advanced Air Mobility (AAM) is an emerging class of Unmanned Aerial Vehicle (UAV)-based services focused on the transportation of individuals and cargo. With the recent advancements in the field of technical solutions related to the AAM use cases, e.g., construction of electric Vertical Take-Off and Landing (VTOL) or solid automated control, the implementation of the carrier-grade AAM services has become more feasible. This resulted in the increased rise of interest in both academia and the telecommunication and aviation business. One of the candidate telecommunications solutions commonly mentioned in the context of support and leveraging such services is the 5G System (5GS).
The goal of this review paper is first to analyse the key requirements, needs and future expectations of the AAM verticals regarding the performance, capabilities and mechanisms of the mobile telecommunications system. Based on the analysis, the verification of 5GS and research community support for AAM, together with the identification of potential gaps, is conducted. Finally, a high-level vision of potential AAM services improvements that can come with the wide deployment of the future 6G System (6GS) is outlined.
The structure of the paper is as follows. In Section 2, the AAM ecosystems characteristics are discussed with a focus on specific regulatory conditions, service types, needs and requirements that have to be satisfied to allow AAM services at the carrier-grade level. Section 3 presents the current progress of standardisation activities related to the aviation ecosystem with emphasis on integration and interactions between the Unmanned Aircraft Systems Traffic Management (UTM) system and 5GS, as well as shows the high-level view on the research activities related to the mobile networks extensions towards AAM operations. In Section 4, the key 5GS features that not only support but also leverage the AAM operations are categorised and listed. Next, the envisioned evolution of mobile networks towards 6G is described, emphasising the key elements that can further contribute to future AAM operations (cf. Section 5). Section 6 provides the verification of the feasibility of mobile network based AAM services, as use-case specific requirements are confronted with the 5GS and 6GS performance Key Performance Indicators (KPI). Finally, Section 7 summarises and concludes the paper.
2. Advanced Air Mobility Ecosystem—Conditions, Services, Needs and Requirements
Advances in multiple areas, i.a., systems of electric propulsion, electric VTOL, positioning, Artificial Intelligence (AI)-based automated control, Information and Communications Technology (ICT), and sensors, have enabled the development of the new, disruptive AAM vision, which is, according to the National Aeronautics and Space Administration (NASA) of USA, “an air transportation system that moves people and cargo between places previously not served or underserved by aviation–local, regional, intraregional, urban–using revolutionary new aircraft that are only just now becoming possible” [1] and includes both manned and pilot-supervised/autonomous unmanned aircrafts of various size and mission. AAM covers miscellaneous groups of stakeholders (commercial/industrial, public sector, military, private citizens), deployment regions (e.g., megacities/agglomerations, coastal/bay/delta, island chains, rural areas, mountainous regions), and missions (moving people, moving goods, data collection, task/process automation) [2]. European Union Aviation Safety (EASA) still limits its view to the area of Urban Air Mobility (UAM), i.e., “new safe, secure and more sustainable air transportation system for passengers and cargo in urban environments, enabled by new technologies and integrated into multimodal transportation systems” [3]. Both AAM and its subset—UAM have to face multiple requirements associated with safety, security, resilience, regulation, scalability, flexibility, and environmental impact, including sustainability.
AAM will be deployed within the UTM ecosystem [4] (U-space in the European Union (EU) [5]) composed of multiple services to support the aerial operations the binder and foundation of which is the ubiquitous ICT environment. However, the component communication network cannot only be a transparent relay of data, but it must participate in the dynamics of UTM process interactions by means of additional exposed services. Mobile network is a natural candidate for this role, as it provides ubiquity (at least potentially), unified Internet Protocol (IP)-based connectivity for various use cases and purposes, globally recognised standard of network and User Equipment (UE) implemented worldwide and providing the support for roaming, i.e., operation outside a country of UE registration, which is of premium importance in EU due to the principles of “single European sky” and “free movement of goods and services”.
The four aforementioned groups of AAM missions can be split into various use cases:
- human mobility—air-TAXI, recreational/tourist/sightseeing flights (singly or in swarms), medical transport (air-ambulances), mobility of public personnel (including public security services);
- goods mobility—cargo transport, parcel delivery, medical transport (medicines, blood, organs for transplantation, samples for analysis, etc.), food transport, transport of smaller animals (e.g., to a veterinary clinic and back);
- data collection—monitoring of environmental parameters (temperature, humidity, air quality, etc.), acquisition of data from distant off-line sensors, acquisition of still images, mobile network data acquisition/3D coverage survey or monitoring, coverage and interference surveys for Industrial, Scientific, Medical (ISM) bands communication technologies, e.g., Long Range Wide Area Network (LoRaWAN), biodiversity monitoring (animals, plants, environmental changes), surveys of exhaust fumes emitted by building chimneys and detection of burning prohibited substances;
- task/process automation—photogrammetry (e.g., for geodesy/cartography, agriculture, forestry, inventory of buildings, and inventory of flora for biodiversity monitoring, disaster detection), infrastructure inspection, equipment tracking, surveillance (criminals identification and chasing, pandemic management via identification of the infected people, etc.), situational awareness.
The wireless connectivity will primarily support the needs associated with aviation itself (“non-payload” transmission): Command and Control (C2), UTM, and inter-aircraft communication (e.g., position/trajectory broadcasting or collision avoidance) as well as First Person View (FPV) for remote pilot in case of non-autonomous flights. Additionally, depending on the flight use case, various needs for “payload” connectivity may apply:
- WiFi for passengers through an aggregated mobile access of an AAM aircraft;
- Augmented Reality (AR)/Virtual Reality (VR) for sightseeing flights passengers, medical personnel or public (security) services;
- intra-swarm multimedia communication for passengers;
- cargo tracking;
- Real-Time (RT) monitoring of patients’ vital signs in air ambulances;
- RT monitoring of sensitive cargo (medical transport, food, live animals, special shipments)—both using sensors (temperature, pressure, etc.) and multimedia streaming;
- still images acquisition associated with geofencing (for imaging-restriction areas);
- acquisition of diverse geo-tagged data with on-board sensors;
- relaying of stationary off-board sensors data;
- RT multimedia streaming from a remotely controlled audio/video acquisition system for remote inspection/awareness.
Future AAM aircraft can include devices supporting a single purpose of mission or multiple purposes. Such multi-purpose AAM devices, along with technological development, can evolve toward programmable ICT platforms, and new AAM business models can emerge, e.g., “AAM-ridesharing” (analogous to “ridesharing” or “carpooling” in the automotive field)—the AAM operators can offer “side effect” services based on data additionally acquired during multiple, other purpose flights (cargo/parcel delivery, air-TAXI, etc.): crowdsensing of environmental parameters, creation of 3D mobile network coverage maps or spatial visualisation of individual base station effective radiation characteristics, detecting the presence of certain species of wild animals in urban areas, and even offering surveys/measurements/inspections at a specific place and time based on a scheduled flight plan. Such “AAM-ridesharing” approach would also be justified in terms of environmental impact or sustainability.
The fundamental difference between AAM and terrestrial mobility is that the former creates a nodal transportation network (direct connections between any points), and the latter creates a linear network along permanent communication routes limited by geography. AAM provides flexible capacity, inherent adaptability to flow changes, resilience to disruptions, and protection against congestion [2]. However, all these positive features for transport flow pose a challenge to the communication platform, which must provide support anywhere, anytime, and often without prior notice.
3. Related Work
3rd Generation Partnership Project (3GPP) has been dealing methodically with the problem of Unmanned Aviation System (UAS) support by the 5G Public Land Mobile Network (PLMN) since 2018. The alliance follows the 3-stage methodology of International Telecommunication Union (ITU) composed of: Stage 1—service requirements from the user point of view, Stage 2—architecture to support the service requirements, and Stage 3—details of the architecture implementation. 3GPP issues technical reports (non-normative) and technical standards (normative). The first 3GPP release standardising 5GS was the 3GPP Release 15, and the first one to deal with UAS support was the 3GPP Release 16. According to the roadmap (cf. Figure 1, the 3GPP Release 17 is frozen since the middle of 2022, but its fundamental documents have been still under the change control (change requests being processed) until the last session in June 2023 [6]. Currently, according to the timeline, the 3GPP Release 18 Stage 2 has just been frozen, while its Stage 3 will be frozen at the end of 2023. The studies on the scope of the future 3GPP Release 19 are in progress, its scope definition will be concluded also at the end of 2023, and it is expected to be the first one dealing with the 6GS requirements. The 3GPP Release 20 will probably perform first 6GS studies, and the 3GPP Release 21 will likely bring the first “6G Basic” drop in late 2028 (indicative dates, assuming the typical 3GPP release cycle) [7].
In the initial study [10], ten use cases have been described: initial UAS authorisation to operate, live data acquisition by UTM, data acquisition by law enforcement, enforcement of no-fly zones for UAV, distributed close-field separation service for mutual Unmanned Aerial Vehicles (UAVs) collision avoidance, local broadcast of UAS identity, differentiation between UAV-specific UE and regular UE attached to UAV, cloud-based Beyond Visual Line of Sight (BVLOS) UAV operation, UAV fly range restriction, and UAS-based remote inspection. On this basis, 3GPP has defined a separate normative Stage 1 document [11] specifically referring to UAS service requirements for 5GS, both functional and Quality of Service (QoS) ones. In the successive study [12], the description, gap analysis vs. the Stage 1 standard [11], and potential new requirements identification have been performed for additional 13 use cases, namely: UAV supporting high resolution video live broadcast application, radio access node on-board UAV, UAS C2 communication, simultaneous support for UAVs and Enhanced Mobile Broadband (eMBB) users data transmission, autonomous UAVs controlled by AI, isolated deployment of radio access through UAV, radio access through UAV, separation of UAV service area from other User Equipments (UEs) served by a base station, UAV communication service experience assurance, service availability to UAVs swarm of UAVs in logistics, changing UAV Ground Control Station (GCS), and framework for steering KPIs of UAV. Within the scope of the 3GPP Release 19, there is also an on-going study of additional capabilities of PLMN for drone operations and management (report in maturing phase) [13]. The study defines and analyses the new set of 7 use cases, including identification of their new requirements, namely: detection of UE on-board UAV, supporting UAV pre-flight preparation (PLMN to answer flight feasibility query by UTM), geofencing for Visual Line of Sight (VLOS) UAV missions, network-assisted UAV Detect And Avoid (DAA)—detection and collision avoidance (relative distance between UAVs to be determined and reported to UTM by PLMN), 3GPP network as an information (spatial, surveillance, meteorological, and RT positioning information) source for UTM, support for UAV in-flight operations with RT reporting of QoS, performance, and stability of C2 link along the route, and UAV flight route tracking at rendez-vous points (PLMN as a UAV traffic sensor and locator, also in the case of non-networked UAVs or served by other Public Land Mobile Networks (PLMNs) in the area).
Table 1 presents example 5GS performance requirements for UAS support according to 3GPP [11]. 3GPP recognises the following C2 modes: steer to waypoints, direct stick steering, automatic flight on UTM, and approaching autonomous navigation infrastructure. It is additionally stated that the C2 communication between UAS and UTM can be allowed to experience much longer traffic interruptions at the application layer, e.g., timeouts of 30 s on the uplink and 300 s on the downlink. The data rate requirements for these C2 modes have not been explicitly defined, but they can be derived from the given message sizes at specified latencies. The most challenging data rate 3.2 Mbps is for the last C2 mode. Examples of non-C2 communication services for UAS show a significant scatter of performance requirements. For the communication from UTM to UAS, the data rate is not specified, but it can be derived as above—the estimated value is 16 kbps. The video quality assumed by 3GPP for Beyond Visual Line of Sight (BVLOS) FPV is not high. Peak performance requirements for UAS are for the 4 × 4 K AI surveillance communication service.
Stage 2 work began with studies on supporting UAS connectivity, identification and tracking [14] and application layer support for UAS [15]. The former dealt with solutions to the network-level key issues: UAV and its GCS identification, UAV authorisation by UTM, UAV GCS identification and authorisation/authentication, UAV and its GCS tracking, UAV authorisation revocation and (re)authorisation failures, UAV GCS and UAV(s) association, and connectivity to UTM for UAV. The latter concerned solutions to the application-level key issues: broadcast communications, UAV location information reporting to UTM, exposure of capability to access UAS-related information, UAV application server QoS provisioning, switching and selecting C2 communication modes, UTM information provisioning to UAV and/or its GCS, UAS identification capability usage (also in case of UAS components change/update) in the application layer, media session monitoring and management, the impact of UAS application hosting in an edge data network instead of cloud, support for reporting of RT UAV UE monitoring information, and tracking of UAV location deviation. The proposed solutions from both studies have been analysed, and the selected solutions have been put into the Stage 2 normative documents, respectively network-level [16] and application-level [17] ones. It is worth a mention that the fundamental Stage 2 outcomes include the identification of integration architecture of PLMN and the UTM/AAM ecosystem (cf. Figure 2), definition of mechanisms of joint PLMN and UTM authentication and authorisation of a UAV to operate as well as UAS C2 connectivity control, UAVs position tracking and reporting, and defining a special Unmanned Aviation System Network Function (UAS NF) whose task is to act as a standardised mediator between PLMN and the UTM/UAS ecosystem and expose all 5GS control mechanisms and information related to UAS communication support. In the recently completed studies, further network-level [18] and application-level [19] key issues associated with UAS support have been analysed and solutions have been proposed for further selection and inclusion into the standardisation. The former, addressing further architecture enhancements for Unmanned Aviation Systems (UASs) and explicitly UAM, has been dealing with communication between UAVs or UAV and its GCS through a direct 5G inter-UE link bypassing PLMN (base stations and core), short-range UAV identifier broadcasting, and support for short-range area DAA based on direct inter-UAV links. The latter has addressed the application-level issues of a direct inter-UE communication between UAVs or UAV and its GCS, support for a UTM change during a flight and for DAA.
Additionally, the security aspects of UAS have been studied and standardised. The initial study has analysed the threats, potential security requirements, and proposed solutions of the following key issues: UAS authentication and authorisation, pairing authorisation for UAV and its GCS, Third-Party Authorised Entity (TPAE) authentication and authorisation, location information veracity and location tracking authorisation, privacy protection of UAS identities, security protection of information in remote identification and between UAV/GCS and UTM, security of C2 communication [20]. The study outcomes have fed the normative document scope, namely authorisation and pairing of UAS components as well as location tracking authorisation and veracity [21]. There is another completed Release 18 study on security aspects of UAS, UAV, and UAM, dedicated to direct inter-UE C2 security, authorisation and privacy, security and privacy of DAA unicast and broadcast connection, and UAV identifier broadcast privacy and security [22].
The 3GPP Stage 3 documents associated with the UAS support include definitions of services offered and Application Programming Interfaces (APIs) of UAS NF [23] and of the UTM mediation module exposed toward PLMN and embedded in it to support the joint PLMN and UTM authentication and authorisation of UAVs [24].
The progress summary of 5GS support dedicated for Unmanned Aviation Systems (UASs) in specific 3GPP releases is provided in Table 2. The status of support depends on the individual release:
- Release 17: included in standardisation (release completed).
- Release 18: work in progress.
- Release 19: scope candidate use cases waiting for approval at the end of 2023.
No dedicated features specifically supporting UAS in Release 15 and Release 16.
While 3GPP is an industrial standardisation alliance, it is also fed by the contributions resulting from scientific research activities led by the alliance partners, in particular as part of research and innovation programs of EU and its bodies, namely Horizon 2020/Horizon Europe or aviation-oriented EU partnership programmes such as Single European Sky ATM Reaserch (SESAR) Joint Undertaking. The Horizon 2020 5G!Drones [27] project has integrated the domains of aviation (traffic management, drone control), and the 5G network to conduct trials of various AAM scenarios, including data collection (UAV-enhanced Internet of Things (IoT) data acquisition, environmental mapping, 5G QoS 3D mapping, long-range powerline inspection, suspicious activity detection), task and processes automation (wildfire monitoring, disaster recovery), and goods mobility (medicine delivery). The project has also provided the validation of KPIs for 5G-UAS services, proposals of mechanisms for joint 5GS–UTM authorisation of UAVs with required architectural extensions [28], and a roaming 5G architecture enabling service continuity during the cross-border UAS operations [29], without trialling handovers, however. The EU-Korean collaborative project PriMO-5G [30], analysed the use of 5G-based communication to enhance situational awareness to support firefighting operations in forest and urban scenarios. Another Horizon project ETHER aims to provide a multilayered 3D flexible and sustainable unified Radio Access Network (RAN) architecture, air interface technical innovations and data-driven automated resources management to enable the integration of Terrestrial Network (TN) and Non-Terrestrial Network (NTN). Part of the project’s interest is to demonstrate the implemented architectural support (including horizontal and vertical handovers) for air-space safety-critical operations. In the SESAR GOF 2.0 project [31], the highly automated unified Air Traffic Management (ATM) has as been demonstrated in the use cases related to dense operations in control zones, airspaces mobility (controlled/uncontrolled airspace and U-space airspace/non-U-space) and cross-border operations. Also, the key enablers for cooperation between telecom and UTM ecosystem facilitating AAM operations have been investigated, which included the interfaces and data models for automated data exchange or mobile-network-based population density prediction systems [32]. The major activities in the field of AAM are also undertaken outside of EU. The Open Generation 5G Consortium targets AAM use cases (commercial parcel delivery, static infrastructure inspection, emergency response, and indoor inspection and security via UAS) that can highly benefit from 5G-based communication and aim to implement testbeds, experimentation and demonstrations to validate the scenarios [33].
GSM Association (GSMA), an association of Mobile Network Operators (MNOs) worldwide, and Global UTM Association (GUTMA) have established the Aerial Connectivity Joint Activity (ACJA) initiative to build mutual understanding and cooperation between the unmanned aviation and mobile network domains. The outcomes of the group [34] focus on the definition of interfaces for data exchange between both industries’ ICT ecosystems and managerial services exposed by PLMN towards the UTM system. The ACJA documents do not define the requirements for communication services as such to be consumed by the UAS domain.
4. Key 5GS Support for AAM Operations
The 5G technology is expected to revolutionise the industry by providing a flexible, reliable and highly efficient communication platform adaptable to specific use cases as well as network extensions to unleash the full potential of vertical services. Apart from the generic mechanisms that can be exploited by any branch of industry, 5GS offers very specific support to the UAS ecosystem enabling the accommodation of the UAV-based services including AAM. Some of the key 5GS paradigms and features that can bring substantial benefits and leverage AAM services include:
- “All-IP”—Separation of network access layer and services layer. The former is based on the unified IP packet network. Services are built upon the IP-based access. The approach has been introduced to mobile networks with 4G. However, to enable very low power consumption devices, User Equipments (UEs) using only the services based on network signalling without implementation of IP stack for user data, are also supported in 5GS.
- Communication network softwarisation—Formerly, the mobile network used to be implemented with monolithic telecom infrastructure using proprietary, application-specific hardware (HW) and closed interfaces. The fundamental assumption of 5GS is softwarisation of the communication network architecture functional entities using the commodity HW. Consequently, it is possible to achieve flexibility, scalability, (re-)programmability, and a high degree of automation of the network.
- Virtualisation—Decoupling of software (SW) and HW by a HW virtualisation layer. SW is not run on a dedicated HW but on virtualised resources exposed to it (also dynamically scaled), based on a pool of physical resources behind the virtualisation layer. SW and HW life cycles are therefore separated; it is possible, e.g., to perform expansion or maintenance activities of HW without impact on SW.
- High modularity—The 5GS architecture has been modularised with high granularity, which serves to implement exactly the functionalities that are needed instead of occupying resources with largely unused ones. In this way, network functions can be individually placed as close as possible to the focal points of demand and also individually scaled. An additional factor is the Control and User Plane Separation (CUPS) principle, thanks to which the handling of control traffic in Control Plane (CP) and user traffic in User Plane (UP) can be treated and optimised separately.
- Service-Based Architecture (SBA)—The 5GS Core Network (CN) CP is designed as a set of interconnected Network Functions (NFs) producing and consuming services according to “subscribe-notify” and “request-response” mechanisms upon the RESTful APIs, JSON serialisation, and HTTP/2. The inter-Network Function (NF) communication in CP is provided and managed by a message broker, which also allows to logically partition CP or manage the access of individual CP Network Functions (NFs) to each other.
- Network exposure—The network control mechanisms of CP are to be exposed to the external third-party systems, e.g., vertical industries’ ICT environments. Additionally, the “embassies” of trusted systems (some functional modules, e.g., for mediation with PLMN) can be directly embedded in CP due to the concept of generic Application Function (AF) interacting with the native CP NFs according to SBA mechanisms.
- Network Slicing (NS)—The implementation of the “all-IP” 4G network revealed the problem that the requirements of different services with sometimes extremely different specificities are irreconcilable in the unified UP architecture, which in consequence does not provide satisfactory services support by PLMN. Therefore, the NS approach was proposed in which certain common CP mechanisms (e.g., mobility management, user data session control, user capabilities subscription management, network capabilities exposure, etc.) can be extended, using SBA ones, with some service- or application-specific features, and the user traffic can be treated separately in a UP chain architecture adapted specifically to the service or application. The atomic functions to compose the UP traffic handling chain can involve deep packet inspection, traffic forwarding or redirection, flow duplication and parallelisation to improve reliability, packet selective marking, enriching or altering, packet classification and encapsulation, firewall, anti-virus protection, parental control, etc. This way, PLMN evolves from a universal network to a “federation” of virtual parallel networks (“network slices”) over a shared infrastructure and common control mechanisms. NS is also supported by QoS control and traffic prioritisation mechanisms. The wide implementation of NS, however, is significantly delayed by its technical complexity as well as the legislative implications of the regulations related to the “network neutrality” concept. The latter can potentially limit the deployment of NS-based services over the public network to mitigate their potential impact on consumers of internet access services [35].
- Management and Orchestration (MANO)—The 3GPP-compliant European Telecommunications Standards Institute (ETSI) MANO orchestrator [36] provides the network operators with the mechanisms to dynamically orchestrate and manage network slices with their components—the functionalities of critical importance in the context of infrastructural resources usage optimisations, slices’ Service Level Agreement (SLA) maintenance and adaption of the deployed slices to the network workloads, etc. From the business perspective, the ability to deploy network slices and expose relevant management interfaces to the tenants in a fast manner positively contributes to both the cost as well as Time To Market (TTM) for the vertical customers’ services.
- Direct inter-UE communication—The capability of direct communication between UEs in proximity. The same radio interface is used as in the case of the link between UE and the base station. The cross-PLMN communication is also assumed (exchange between UEs attached to different PLMNs).
- Network performance—5GS is designed to offer a significant communication performance that includes peak data rates of 20 Gbit/s in the downlink and 10 Gbit/s in the uplink, user-experienced data rates up to 100 Mbit/s, close to 1 ms latencies in the radio access layer, area traffic capacity of 10 Mbit/s/m2, support for up to 1 million devices per km2, and top spectral efficiency of 30 bit/s/Hz. The network also should support objects’ mobility up to 500 km/h with zero interruption time, which should be sufficient for the vast majority of AAM use cases [37,38].
The standalone 5GS architectural framework, specified by 3GPP based on the above principles and paradigms, is presented in Figure 3. Its features indicated in the diagram include [39]:
- SBA-based CP, using message broker—Service Communication Proxy (SCP) for signalling exchange to which all other CP NFs are connected (discussed below, shown in Figure 3 as individual NFs or grouped functionally for convenience); Network Repository Function (NRF) provides the connected NFs repository to be used, e.g., during a CP service producer discovery by a consumer NF.
- Access and mobility management—both RAN with base stations and the Access and Mobility Management Function (AMF) entity, which acts as a UE and RAN nodes signalling termination point and their entry (gateway) to CP mechanisms. Particularly, AMF manages the UE mobility mechanisms, e.g., handovers.
- User traffic handling—composed by global Policy Control Function (PCF) and pairs of User Plane Function (UPF) and its own Session Management Function (SMF)—both separated according to CUPS. UPF, tailored to service specificity, is terminated in a specific Data Network (DN), e.g., public Internet, non-public IP network, etc. PCF controls, e.g., UE QoS) according to the user subscription.
- Authentication and authorisation—of both customers—Authentication Server Function (AUSF) and UE—5G Equipment Identity Register (5G-EIR): stolen terminals, terminals’ capabilities, etc.
- Data management—group of NFs providing general user and network data management and storage mechanisms served commonly to various CP NFs: Unified Data Management (UDM), Unified Data Repository (UDR), and Unstructured Data Storage Function (UDSF).
- Network slicing—NFs that may include such network slicing-supporting entities like: Network Slice Selection Function (NSSF)—used during slice request by UE, Network Slice-specific and Stand-alone non-public network Authentication and Authorisation Function (NSSAAF)—slice-/application-specific authentication and authorisation mechanisms, and Network Slice Admission Control Function (NSACF)—UE admission control mechanisms. These NFs together with SMF/UPF pair constitute a network slice instance.
- Network data analytics—mechanisms of network events/performance data collection, mediation, storage, and analytics: Data Collection Coordination Function (DCCF), Messaging Framework Adaptor Function (MFAF), Analytics Data Repository Function (ADRF), and NetWork Data Analytics Function (NWDAF), respectively.
- Location—extension of 5GS CP providing a network- and UE-assisted LoCation Services (LCS) framework [40].
- Edge computing/Multi-access Edge Computing (MEC) support—functions for integration of 5GS with edge computing frameworks [41], including ETSI MEC.
- Short Message Service Function (SMSF)—service management subscription data checking and charging, messages relaying and delivering.
- AF—application part embedded in 5GS CP to interact with 3GPP CN in order to provide services.
- Network Exposure Function (NEF)—entity acting as a CP gateway for external systems and AFs non-native for 5GS CP, but embedded therein. It offers, i.a., exposure of capabilities and data, secure provision of information from the external system to 3GPP network, and translation of exchanged internal-external information.
- UAS NF—functionality supported by NEF for external exposure of CP services and data to UTM [16]. It may be either implemented as a specialised NEF or embedded in a multi-purpose NEF.
To leverage softwarised character, exploit modularity, and increase the openness of 5GS to the external stakeholders, several generic solutions have been proposed to facilitate the 5GS cooperation and data exchange with external systems. The support for integration, noteworthy in the AAM context, include so far:
- Vertical applications—The implementation of 5GS functions’ northbound interfaces follows the common unified rules specified within, i.a., Common API Framework for 3GPP northbound APIs (CAPIF) [42], which allows secure APIs exposure in two ways (5GS to the third parties, and third-party APIs to the 5GS CP). The CAPIF framework also unifies the mechanisms of AFs on-boarding/off-boarding, service discovery, service management, event subscriptions, security and charging aspects. The other mechanism that leverages vertical applications development, deployment and integration is the Service Enabler Architecture Layer (SEAL) framework, which exposes common service enablers and CAPIF-compliant APIs for verticals. The currently standardised services include the management of groups (creation of groups of devices, e.g., for group communication), location (providing device location from 3GPP and non-3GPP source), identity and key (authentication, authorisation of users and devices), and network resources (application-specific usage and monitoring of resources utilisation by devices) [43]. The SEAL framework also supports distributed deployments and inter-service communication between different SEAL servers for improved spatial availability (e.g., for the purpose of location-based group management).
- Edge environments—3GPP proposes specialised CN and UE functions as well as relevant interfaces to facilitate the interactions of clients with the applications deployed at the network edge. The exposed capabilities include application servers discovery, provisioning of information regarding registration, configuration and connection to the edge services, support for service continuity, charging, exposure of 5GS CP mechanisms, etc. [44]. One of the most promising edge solutions, interworking with 5GS, is MEC. In addition to providing the ecosystem for management and orchestration of edge applications, MEC exposes several APIs to leverage vertical services, which include, i.a., Radio Network Information [45] (PLMN information, radio network measurements), Location (device location, information on distance to specific location or device, zonal presence) [46], UE Identity (identifiers allowing UE specific traffic rules in the MEC system) [47] or Traffic Management [48] (per application session data rate management) API. It has to be emphasised, however, that 3GPP provides a generic solution to enable the application-level integration with any third-party edge solution to provide openness and a high degree of flexibility of deployment for vertical edge applications.
- UTM ecosystem—The interconnection between the 5GS-UTM ecosystem is implemented by the specialised 5GS CP function called UAS NF. UAS NF plays the role of a mediator between 5GS and UTM by facilitating data exchange between entities as well as joint operations. It supports the mechanisms for remote identification, UAV authentication and authorisation (during 5GS network registration, data session establishment or UAV-GCS pairing), UAV flight authorisation, UAV and GCS authorisation, procedures for re-authentication/re-authorisation and revocation on the UTM’s request, location reporting of individual UAV or a list of UAV in a specified area, establishment and control of requested QoS/traffic filtering for C2 communication, or UAV presence monitoring. UAS NF can also implement and expose the CAPIF-compliant interfaces to the UTM ecosystem, as long as CAPIF is deployed in the network.
- NTN systems—3GPP works intensively on integration of NTN components—Geostationary Earth Orbit (GEO), Low Earth Orbit (LEO), and Medium Earth Orbit (MEO) satellites, High Altitude Platforms (HAPs)—into 5GS to accommodate most pressing NTN applications identified so far: coverage extension, IoT, disaster communication, global roaming, and broadcasting [49]. The consolidated functional and QoS-related satellite service requirements have been established (e.g., delay, expected data rates, traffic capacities) with the most elevated ones for airplane connectivity (360 Mbps downlink, 180 Mbps uplink, planes flying at maximum speed of 1000 km/h) [50]. The scope of NTN RAN is so far limited to a bent-pipe or relay communication mode [51]. Currently, 5GS provides support for NTN in terms of recognition of NTN access by UE, identification/restriction of using satellite 5G radio access, integrated access and backhaul, discontinuous network coverage for satellite access, high latency communication, UPF deployment on satellite (enabling edge computing and local UE–UE communications). Also, the guidelines for extraterritorial 5GSs have been established [52]. The future work proposed for the scope of the 3GPP Release 19 [53] will be focused on 5GS support for new use cases such as store and forward for a delay-tolerant/non-RT IoT in remote areas, ephemeral satellite access-based emergency reporting, UAVs connectivity over satellite access, video streaming, exploiting satellite connectivity to collect supplementary information, i.a., to aid service differentiation for UEs via satellite access.
Accommodation of the advanced 5GS-based services requires the development of mechanisms that boost the performance and capabilities of RAN as well as relevant investments in the infrastructure during the network planning and implementation phases. The key operational aspects related to 5GS RAN are described below.
- Operating frequencies and capacity—5GS is designed to operate in two frequency bands referred to as FR1 (410–7125 MHz) and FR2 consisting of two sub-bands FR2-1 (24,250–52,600 MHz) and FR2-2 (52,600–71,000 MHz) [54,55]. While FR1 and FR2-1 bands are licensed, the FR2-2 is available for unlicensed operation, depending on the regional and/or country-specific regulatory requirements. The available channel widths are: in FR1 (sub-GHz) 5–35 MHz (5 MHz steps), in FR1 (>1 GHz) 5/10/20–100 MHz (depending on a specific band, n × 5 MHz steps), in FR2-1 50/100/200/400 MHz, and in FR2-2 100/400/800/1600/2000 MHz. For the assumed peak spectrum efficiency of 30 bit/s/Hz [38], the indicative maximum total capacity is 30 Mbit/s per every 1 MHz of used bandwidth. Additionally, bands aggregation (so-called “carrier aggregation”) is possible, up to 6 bands in FR1 and up to 2 bands in FR2.
- Spectrum properties and outcomes—5GS operates in a very wide spectrum of frequencies resulting in the occurrence of different radio propagation-related phenomena and their varying intensity, which affect the transmission range. The primary effects that impact the link budget include path loss (i.e., the loss of power due to radio signal propagation, increasing with frequency and distance), scattering (e.g., due to atmospheric conditions like rain or mist), absorption, etc. While the 5GS FR1 frequencies enable maintenance of considerable coverage ranges (over km), the wide-scale exploitation of FR2 poses significant challenges, mostly due to tremendous signal losses (e.g., non-VLOS urban scenario indicated the effective range of approximately 50 m to maintain the throughput of 1 Gb/s for transmission at 27 GHz) [56]. As a consequence, each of the above-mentioned 5GS frequency ranges will play a different role in an overall network picture, i.e., sub-GHz FR1 is expected to cover large areas with relatively low capacity (scarcely populated rural areas), the rest of FR1 band is destined to provide high-capacity city-wide coverage, while the highest FR2-1, FR2-2 will deliver ultra-high gigabit speeds and low latencies on very short distances (applicable mostly in campus network deployments) [57].
- Specific support and RAN-related enablers—The already described 5GS NS is an E2E concept, i.e., it applies both to CN and RAN. While the slicing in CN is well defined, the latter is left to the equipment vendors, which opens the way for the inclusion of dedicated support for specific use cases, if needed. RAN slicing is usually achieved by implementing traffic handling policies and relevant prioritisation (e.g., special treatment of AAM traffic) in the base station at the scheduler level to meet QoS targets for each slice. It must be noted that 3GPP also does not specify the architecture of the RAN controllers. This approach allows for using third-party solutions such as Open RAN (O-RAN), which provides the support for generic RAN optimising applications (so-called xAPPs) that can be tailored to the AAM benefits and specific needs [58]. Moreover, 3GPP proposes several RAN mechanisms to address the elevated performance requirements. One of the common concerns regarding 5GS-based AAM is the aspect of coverage provisioning. To this end, 5GS provides functionalities of beam management (beam forming, steering, selection) [51] that enable the improvement of the quality of transmission between UE and the base station. For today, however, the means for leveraging this mechanism in cooperation with UTM is very limited (no interfaces to request coverage adaption in the area of concern directly is defined).
Concluding, 5GS is a programmable, scalable mobile telecommunications framework, which offers not only reliable communication capabilities but also extensive support to leverage vertical services. The most significant features include CN functions and data exposure via standardised APIs to the vertical ecosystem, implementation of dedicated CN functions, integration with the UTM ecosystem (via dedicated UAS NF) or edge environments, ability to accelerate service deployment by reusing shared generic vertical CN functions (via SEAL framework) and the mechanisms for fine-grained control over the end users’ traffic.
5. Evolution towards 6G and Perspectives for AAM
With the high maturity of the 3GPP standardisation and rapidly progressing deployment of 5GS across the world, the work on defining the targets for the next mobile telecommunications system has started. It is commonly agreed that 6GS should be oriented towards the societal and environmental challenges, e.g., stated within the United Nations (UN) Sustainable Development Goals (SDG), emerging market expectations, and operational necessities of MNOs [59]. While discussions on the 6G visions and the applied research on enablers and future technologies supported by 6GS have already begun, the beginning of the international standardisation, and thus formulation of architectural solutions, is expected around 2025, and the first implementations since 2030 [60]. That is why a good understanding of the fundamental trends driving 6G visions by the AAM area, the future customer and user of the new communications technology, is so important at this stage when it is possible to influence directions. This section will present the major 6G drivers, design principles and envisioned capabilities that can contribute to accelerating the development of carrier-grade AAM services.
New applications—6G mobile technology is envisioned around new innovative and disruptive applications that include [61,62,63]:
- Holographic communications—based on laser beam producing 3-Dimensional (3D) RT motion images (holography) to be used, i.a., for immersive telepresence and 3D FPV. Enabling full holographic support requires data rates in the order of 1–5 Tbps, E2E latency less than 1 ms, and transmission jitter less than a microsecond to provide concurrent multiple viewing angles’ streams timing synchronisation, and extreme reliability in most challenging use cases (e.g., remote surgery).
- Multisensory xR—a class of applications that includes AR, VR, and Mixed Reality (MR), i.e., merging physical and computer-generated environments, where objects of both can co-exist and interact in real time. The required data rates are in the order of multiple Gbps up to 1 Tbps, and the E2E latency <15 ms.
- Tactile Internet—haptic interaction of humans or machines with machines used in the manufacturing industry, for telepresence and teleoperation, healthcare (especially telesurgery), an extension of VR/AR. Fundamental requirements here encompass sub-millisecond latency and high security.
- Brain-Computer Interaction (BCI)—enabling interaction of humans with their environment and other people using discrete devices (worn, implanted, or in ambience). High data rates and reliability with ultra-low latency are required. Similarly to the two former ones, the requirements have a stringent perceptual aspect stemming from human neurophysiology of senses and cognition; much more sensitive and thus demanding, however.
- Digital twin—the concept of virtual digital replicas of physical objects, systems, or environments, enabling the simulation of phenomena to be used in research, behavioural prediction, education, medical practice, etc. While it will exist in a computation environment, it can use holographic communications, multisensory xR or haptic mechanisms to interact with the human user, inheriting thus their service requirements.
- Teleoperated driving and unmanned mobility—human control of remote vehicles, also as an option for semi-autonomous vehicles or backup for autonomous vehicles when the autonomous mode fails, or immediate response to danger is necessary. It can be used for land or airborne use cases (especially in far or dangerous areas), but also in deep-sea operations or space exploration. The requirements feature extremely high data rates, low latencies, and high levels of communication reliability, integrity, privacy, and security.
- Connected robotics and autonomous systems—they include autonomous cars and ground vehicles, vehicle platoons, drone-delivery systems, autonomous drone swarms, and autonomous robotics. The requirements include the E2E reliability above 99.99999% and sub-millisecond latency at mobility up to 1000 km/h.
The listed applications, beyond the 5GS capabilities, either have a direct association with the AAM needs and context or may be creatively adapted and reused to address them.
Paradigm shift in the network design—Instead of hitherto “network centricity”, “user centricity” [62,64] and “service awareness” are envisioned. The former means a reversal of the relationship—so far, the user has been dependent on the network—its coverage related to network cellularity, capacity, service capabilities, etc. In the case of 6G, it can be said that the network attaches to the user, following him and actively adapting to the service needs to deliver fully and individually user-definable, user-configurable, and user-controllable communication services, e.g., by optimising the parameters of an individual radio link from one or multiple base stations (a cell-free concept with dynamic and overlapping base stations topology) to ensure the appropriate quality of connection in the UE location or by dynamically installing the service chain for the user. The latter is associated with a significantly expanded set of communication services with distinct characteristics compared to 5G, where only three basic classes defined by ITU [37] were recognised: eMBB, Ultra-Reliable Low-Latency Communication (URLLC) and Massive Machine Type Communications (mMTC). Depending on the vision [61,62,65,66] with different naming used, numerous classes of services are defined, but the basic idea behind them is to create diverse blends of the above triad, taking into account various goals for such parameters as peak/perceived data rate, latency including its jitter, reliability, traffic capacity, connection density, user mobility (UE motion velocity), positioning accuracy, etc.
Convergence of multiple functional dimensions—Unlike the earlier generations that are purely communication-oriented, multifaceted convergence is proposed depending on the vision of 6GS—Communication, Computing and Caching (3C) [67], Communication, Computation, Caching and Control (C4), and Communications, Computing, Control, Localisation and Sensing (3CLS) [61]. It will define 6GS as a convergent, multi-purpose system able to deliver various services and applications hosted therein based on these functions as inherent and native features. Another related concept from this area is Integrated Sensing and Communication (ISAC) [68,69], which offers Remote Sensing and Sensing as a Service (SaaS) that also cover the localisation aspect. Examples of ISAC applications include drone swarm Synthetic-Aperture Radar (SAR) imaging, drones monitoring and management (including drones recognition and tracking), enhanced localisation and tracking in mobile network, spatial-aware computing (exploiting geometric relationships between devices), and simultaneous localisation and mapping for building situational awareness from environment exploring, imaging and reconstruction. The convergent functions will be placed in all 6GS points of presence, including the non-terrestrial ones, to enable shifting the user application processing as close to the user as possible.
Pervasive AI—While AI in 5GS is an optional add-on, a collective, distributed AI will be an inherent, endogenous component of 6GS to enable autonomy of network operations, better performance, and resources optimisation, in particular in the evolution from a self-organising network (4G–5G) to self-sustaining, intelligent network, e.g., employing Zero-touch network and Service Management (ZSM) [70] or Experiential Networked Intelligence (ENI) [71] mechanisms to provide autonomous network (including dynamic E2E network slicing) and service orchestration and management [72]. AI will also support the implementation of the “cognitive RAN” concept, i.e., dynamic and intelligent sensing of the electromagnetic environment by base stations in order to find spectrum available for local use. AI-driven user context awareness recognition and analysis, per-user predictive analysis of service degradation will support the user-centricity aspect of 6GS, QoS improvement, and fulfilment of SLA. Additionally, through the Artificial Intelligence as a Service (AIaaS) approach and leveraging the convergence described above, the network intelligence can be consumed by user services. This relation, however, will be mutual: due to the 3C/C4/3CLS, the intelligence will migrate from the central cloud to far edges-located ubiquity and closeness to the user.
Ubiquitous 3D connectivity—Unlike the previous generations, 6GS will be, by design, a 3D omnipresent platform with 4 tiers: terrestrial, aerial, space, and underwater [73] to support any communications demand anywhere. From the point of view of AAM, the aerial and space tiers will be of premium importance in terms of providing communications services availability in current white spots with reasonable delays related to altitudes; the former implemented with floating base stations in HAPs and flying base stations in UAVs (altitude range 8–50 km and footprint range 5–200 km [74], round trip delay component due to a distance of less than 2 ms), the latter—when utilising constellations of LEO satellites (altitude range 300–1500 km and footprint range 100–1000 km [74], round trip delay component due to distance of less than 25 ms). It should be noted that LEO satellites orbit with tangential velocities of 7.5 km/s (27,000 km/h) and orbital periods of 1.5–2 h [75], it is, therefore, necessary to develop new modulation schemes resistant to Doppler shift and robust UE mobility management mechanisms. Applicability of unified multi-tier UEs in AAM vehicles will also require reducing the dimensions of antennas for communication with LEO satellites without degradation of the link signal budget, e.g., through distributed beamforming from a large virtual array composed of LEO satellites swarms [76].
Improved service availability and TTM—6GS is expected to support cloud-continuum concept [77], i.e., a highly heterogeneous infrastructure layer with resources managed by multiple owners, via tailored management and orchestration systems [78]. The ability to exploit the wide availability of resources will allow for a massive improvement of spatial service availability via dynamic deployment or migration of NF (especially important in the context of UAVs operations and U-space services) as well as optimisation via optimal placement strategies of softwarised NFs.
6. Evolution of Mobile Systems Support of AAM Requirements
The feasibility of AAM applications in mobile networks depends not only on the functional properties and architectures of these networks but also on network performance, which translates into deliverable QoS. In Table 3, the comparison of key 5G and future 6G network performance requirements is provided. Compared to 5GS, most performance requirements of 6GS are expected to improve by even several orders of magnitude. Due to the assumed 3D ubiquity, indicators related to service capacity and demand density are changing from 2-Dimensional (2D) to volumetric ones. The increase in the UE mobility support index enables the provision of services for passenger aviation. There is also a definition of maximum delay jitter, which will enable support for deterministic networking, in particular, holographic communication. However, it should be emphasised that the existing system with defined architecture and properties, subject to the systematic development of standardisation, is compared here with visions of the new system, which is based on postulates and expectations.
From the point of view of QoS requirements, it should be checked whether the most demanding QoS targets of potential AAM applications presented in Section 2, Section 3 and Section 5 can be met by PLMN. The specificity of AAM applications should be taken into account, in which case there is no domination of the downlink traffic, and sometimes the uplink traffic may even be dominant. Based on [11,50,81,82], the following KPIs can be validated:
- Data rate: 1–5 Tbps (holographic communication, 6G), <1 Tbps (multisensory xR, 6G), several Gbps (uplink, near-RT photogrammetry), 1.1 Gbps (remote robots), 0.1–1 Gbps (AR/VR), 10 s–100 s Mbps (downlink, on-board broadband connectivity sharing), 120 Mbps (uplink, RT multimedia video surveillance, very high definition FPV for remote pilot), 3.2 Mbps (the most demanding C2 mode—approaching autonomous navigation infrastructure);
- Latency (delay): <1 ms (holographic communication, tactile Internet, connected robotics and autonomous systems, all 6G), 2 ms (remote robots), 10 ms (AR/VR, the most demanding C2 mode—approaching autonomous navigation infrastructure), 20 ms (RT multimedia video surveillance and FPV for remote pilot), 40 ms (C2 for manual steering), 500 ms (connectivity to UTM);
- Delay jitter: <1 s (holographic communication, 6G);
- Reliability: 99.99999% (connected robotics and autonomous systems, 6G), 99.99% (RT multimedia video surveillance and FPV for remote UAV pilot, AR/VR), 99.9% (remote robots, most C2 modes, connectivity to UTM); note: according to 3GPP, reliability is “in the context of network layer packet transmissions, the percentage value of the packets successfully delivered to a given system entity within the time constraint required by the targeted service out of all the packets transmitted” [50].
The analysis of the above requirements in the context of Table 3 shows that even some of the non-6G AAM applications will not be able to be satisfyingly implemented in 5GS, primarily due to the data rate (near-RT photogrammetry, on-board broadband connectivity sharing) and latency (in practice, 2 ms E2E latency will only be possible in campus networks). While the peak traffic capacity of 5GS reaches 10/20 Gbps, it should be remembered that the values achieved by users strongly depend on the spatial structure of service demand, i.e., in the first approximation, the number of UEs served by a given base station.
One of the key issues to be solved by 6GS is the aspect of real network ubiquity, not only 3D one, primarily the elimination of 2D white spots. Despite the widespread deployment of 5GS worldwide, access to 5G network services is still limited to highly urbanised areas. In the case of EU, the estimations show that only around 72% of EU population can use the 5G network services [83], which indicates the massive deficiency of coverage in rural areas. Additionally, the 5G networks are mainly designed as metropolitan networks, as the 3GPP definition for rural macro scenarios [50] assumes the user-experienced data rate of 50 Mbps (downlink) and 25 Mbps (uplink), while traffic capacities are 1 Gbps/km2 (downlink) and 0.5 Gbps/km2 (uplink). For comparison, in the urban macro scenario, 200× higher data rates and 100× better traffic capacities are assumed for both uplink and downlink. Therefore, in non-urban 5G points-of-presence, despite the expected lower number of attached UEs, the experienced data rate will be lower than in urban areas.
Systematic functional (standardisation) and coverage (MNOs’ investments) development of the 5G network may support most AAM applications, mainly in urban areas. It should be expected that the gradual migration to 6G after 2030 will improve coverage and increase the perceived data rate, as well as lower the perceived latency for the applications listed in Section 2. This will be conditioned primarily by ensuring similar traffic capacity of aerial and space (LEO) tiers base stations, which will play a major role in rural and uninhabited areas. Based on the experience gained so far (in particular the evolution of the 5GS standardisation), it can be assumed that support for the applications discussed in Section 5 outside metropolitan areas will appear later, however, the implementation of 6GS will open new functional horizons that will support the development of AAM.
7. Summary and Conclusions
In this paper, the mobile network evolution in the context of AAM has been presented. First, the high-level picture of AAM ecosystem has been drawn together with conditions specifics of the aviation domain. New emerging use cases within four AAM use case groups, namely: human mobility, goods mobility, data collection and task/process automation, have been identified and described. Also, the benefits of multi-purpose AAM missions, i.e., performing in-flight tasks, additional to the primary mission goal, such as, e.g., environmental and network data collection, extending network coverage, photogrammetry, etc. Afterwards, an extensive review of 3GPP standardisation related to AAM-specific support has been outlined together with the most notable research achievements concerning the integration of aviation and mobile ecosystems. The high maturity of standards and solutions on both aviation and 3GPP sides provides the solid foundation for the future development of AAM services. Moreover, the key 5GS paradigms, architectural solutions, support for AAM verticals (network capability exposure, operation in edge environments, integration with UTM or NTN systems), and RAN-related features that can positively contribute to AAM operations have been described in detail. It must be emphasised that for today, whereas 5GS provides solid support for UAV services, some major issues still exist, e.g., coverage and service availability in remote rural areas. Nonetheless, 3GPP progresses in this matter, e.g., by advancing the integration of 5GS with NTNs such as satellite systems or HAPs. Finally, the envisioned evolution towards 6G and resulting future perspectives for AAM are discussed. While the visions of 6GS have stabilised, and there exists a consensus among the research community regarding the required capabilities and characteristics of the system, the official standardisation activities have not started, yet. Nonetheless, it can already be stated that 6GS will be a user-centric system focused on providing quality on a per-user basis. To this end, it is envisioned that 6GS will provide ubiquitous 3D coverage by leveraging the integration of multiple communication networks (i.e., implementing the “network of networks” paradigm), leverage distributed AI-based operations, integrate AI in the system design, feature high modularity and flexibility, that all together will allow for the accommodation of innovative and disruptive applications. Whereas the requirements of the most of considered AAM use cases are satisfied by 5GS, to host more demanding applications, significant improvements regarding the offered data rate (e.g., for RT photogrammetry) and E2E latency are needed. To this end, from the AAM perspective, 6GS will not only provide means for the implementation of more challenging use cases but will also contribute to the reduction of TTM for the AAM verticals, collectively leading to the solid acceleration of the AAM market growth.
Author Contributions
Conceptualisation L.T. and R.K.; methodology, L.T. and R.K.; visualisation, L.T. and R.K.; writing—original draft, L.T. and R.K.; writing—review and editing L.T. and R.K. All authors have read and agreed to the published version of the manuscript.
Funding
ETHER (https://doi.org/10.3030/101096526) project has received funding from the Smart Networks and Services Joint Undertaking (SNS JU) under the European Union’s Horizon Europe research and innovation programme under Grant Agreement No. 101096526. Views and opinions expressed are however those of the author(s) only and do not necessarily reflect those of the European Union. Neither the European Union nor the granting authority can be held responsible for them.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| 2D | 2-Dimensional |
| 3C | Communication, Computing and Caching |
| 3CLS | Communications, Computing, Control, Localisation and Sensing |
| 3D | 3-Dimensional |
| 3GPP | 3rd Generation Partnership Project |
| 5G-EIR | 5G Equipment Identity Register |
| 5GS | 5G System |
| 6GS | 6G System |
| AAM | Advanced Air Mobility |
| ACJA | Aerial Connectivity Joint Activity |
| ADRF | Analytics Data Repository Function |
| AF | Application Function |
| AI | Artificial Intelligence |
| AIaaS | Artificial Intelligence as a Service |
| AMF | Access and Mobility Management Function |
| API | Application Programming Interface |
| AR | Augmented Reality |
| ATM | Air Traffic Management |
| AUSF | Authentication Server Function |
| BCI | Brain-Computer Interaction |
| BVLOS | Beyond Visual Line of Sight |
| C2 | Command and Control |
| C4 | Communication, Computation, Caching and Control |
| CAPIF | Common API Framework for 3GPP northbound APIs |
| CN | Core Network |
| CP | Control Plane |
| CUPS | Control and User Plane Separation |
| DAA | Detect And Avoid |
| DCCF | Data Collection Coordination Function |
| DN | Data Network |
| E2E | end-to-end |
| EASA | European Union Aviation Safety Agency |
| eMBB | Enhanced Mobile Broadband |
| ENI | Experiential Networked Intelligence |
| ETSI | European Telecommunications Standards Institute |
| EU | the European Union |
| FPV | First Person View |
| GCS | Ground Control Station |
| GEO | Geostationary Earth Orbit |
| GSMA | GSM Association |
| GUTMA | Global UTM Association |
| HAP | High Altitude Platform |
| HW | hardware |
| ICT | Information and Communications Technology |
| IoT | Internet of Things |
| IP | Internet Protocol |
| ISAC | Integrated Sensing and Communication |
| ISM | Industrial, Scientific, Medical |
| ITU | International Telecommunication Union |
| KPI | Key Performance Indicator |
| LCS | LoCation Services |
| LEO | Low Earth Orbit |
| LoRaWAN | ong Range Wide Area Network |
| MANO | Management and Orchestration |
| MEC | Multi-access Edge Computing |
| MEO | Medium Earth Orbit |
| MFAF | Messaging Framework Adaptor Function |
| mMTC | Massive Machine Type Communications |
| MNO | Mobile Network Operator |
| MR | Mixed Reality |
| NASA | National Aeronautics and Space Administration |
| NEF | Network Exposure Function |
| NF | Network Function |
| NRF | Network Repository Function |
| NS | Network Slicing |
| NSACF | Network Slice Admission Control Function |
| NSSAAF | Network Slice-specific and Stand-alone non-public network Authentication and |
| Authorisation Function | |
| NSSF | Network Slice Selection Function |
| NTN | Non-Terrestrial Network |
| NWDAF | NetWork Data Analytics Function |
| O-RAN | Open RAN |
| PCF | Policy Control Function |
| PLMN | Public Land Mobile Network |
| QoS | Quality of Service |
| RAN | Radio Access Network |
| RT | Real-Time |
| SaaS | Sensing as a Service |
| SAR | Synthetic-Aperture Radar |
| SBA | Service-Based Architecture |
| SCP | Service Communication Proxy |
| SDG | Sustainable Development Goals |
| SEAL | Service Enabler Architecture Layer |
| SESAR | Single European Sky ATM Research |
| SLA | Service Level Agreement |
| SMF | Session Management Function |
| SMSF | Short Message Service Function |
| SW | software |
| TN | Terrestrial Network |
| TPAE | Third-Party Authorised Entity |
| TTM | Time To Market |
| UAM | Urban Air Mobility |
| UAS | Unmanned Aviation System |
| UAS NF | Unmanned Aviation System Network Function |
| UAV | Unmanned Aerial Vehicle |
| UDM | Unified Data Management |
| UDR | Unified Data Repository |
| UDSF | Unstructured Data Storage Function |
| UE | User Equipment |
| UN | United Nations |
| UP | User Plane |
| UPF | User Plane Function |
| URLLC | Ultra-Reliable Low-Latency Communication |
| UTM | Unmanned Aircraft Systems Traffic Management |
| VLOS | Visual Line of Sight |
| VR | Virtual Reality |
| VTOL | Vertical Take-Off and Landing |
| ZSM | Zero-touch network and Service Management |
References
- NASA. Advanced Air Mobility Project. Available online: https://www.nasa.gov/aeroresearch/programs/iasp/aam/description/ (accessed on 29 May 2023).
- National Academies of Sciences, Engineering, and Medicine. Advancing Aerial Mobility: A National Blueprint; The National Academies Press: Washington, DC, USA, 2020. [Google Scholar] [CrossRef]
- EASA. Urban Air Mobility (UAM). Available online: https://www.easa.europa.eu/en/domains/urban-air-mobility-uam (accessed on 29 May 2023).
- GUTMA. UAS Traffic Management Architecture; Version 1.0; Global UTM Association: Lausanne, Switzerland, 2017; Available online: https://www.gutma.org/docs/Global_UTM_Architecture_V1.pdf (accessed on 29 May 2023).
- Concept of Operations for EUROPEAN UTM Systems—Extension for Urban Air Mobility (CORUS-XUAM Project). U-space ConOps (edition 3.10). 2022. Available online: https://corus-xuam.eu/wp-content/uploads/2022/11/CORUS-XUAM-D4.1-delivered_3.10.pdf (accessed on 29 May 2023).
- Technical Standard TS 23.501; System Architecture for the 5G System (5GS). Version 17.9.0; 3rd Generation Partnership Project: Valbonne, France, 2023. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3144 (accessed on 29 May 2023).
- Ericsson. 5G Advanced: Evolution towards 6G; White Paper Bnew-22:024836 Uen; Ericsson: Stockholm, Sweden, 2023; Available online: https://www.ericsson.com/49ce19/assets/local/reports-papers/white-papers/5g-advanced-evolution-towards-6g-v2.pdf (accessed on 29 May 2023).
- 3GPP. 3GPP Releases. Available online: https://portal.3gpp.org/#/55934-releases (accessed on 29 May 2023).
- Huawei. 6G: The Next Horizon from Connected People and Things to Connected Intelligence. White Paper, Huawei: Shenzen, China, 2021. Available online: https://www-file.huawei.com/-/media/corp2020/pdf/tech-insights/1/6g-white-paper-en.pdf?la=en (accessed on 29 May 2023).
- 3GPP. Study on Remote Identification of Unmanned Aerial Systems (UAS); Technical Report TR 22.825; Version 16.0.0; 3rd Generation Partnership Project: Valbonne, France, 2018; Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3527 (accessed on 29 May 2023).
- Technical Standard TS 22.125; Unmanned Aerial System (UAS) Support in 3GPP. Version 17.6.0; 3rd Generation Partnership Project: Valbonne, France, 2022. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3545 (accessed on 29 May 2023).
- 3GPP. Enhancement for Unmanned Aerial Vehicles (UAVs); Technical Report TR 22.829; Version 17.1.0; 3rd Generation Partnership Project: Valbonne, France, 2019; Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3557 (accessed on 29 May 2023).
- 3GPP. Study on Uncrewed Aerial Vehicle (UAV) Phase 3 (Release 19); Technical Report TR 22.843; Version 19.0.0; 3rd Generation Partnership Project: Valbonne, France, 2023; Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=4090 (accessed on 29 May 2023).
- 3GPP. Study on Supporting Unmanned Aerial Systems (UAS) Connectivity, Identification and Tracking; Technical Report TR 23.754; Version 17.1.0; 3rd Generation Partnership Project: Valbonne, France, 2021; Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3575 (accessed on 29 May 2023).
- 3GPP. Study on Application Layer Support for Unmanned Aerial Systems (UAS); Technical Report TR 23.755; Version 17.0.0; 3rd Generation Partnership Project: Valbonne, France, 2021; Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3588 (accessed on 29 May 2023).
- Technical Standard TS 23.256; Support of Uncrewed Aerial Systems (UAS) Connectivity, Identification and Tracking; Stage 2; Version 18.1.0. 3rd Generation Partnership Project: Valbonne, France, 2023. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3853 (accessed on 29 May 2023).
- Technical Standard TS 23.255; Application Layer Support for Uncrewed Aerial System (UAS); Functional Architecture and Information Flows; Version 18.2.0. 3rd Generation Partnership Project: Valbonne, France, 2023. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3843 (accessed on 29 May 2023).
- 3GPP. Study of Further Architecture Enhancements for Uncrewed Aerial Systems and Urban Air Mobility; Technical Report TR 23.700-58; Version 18.1.0; 3rd Generation Partnership Project: Valbonne, France, 2023; Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3993 (accessed on 29 May 2023).
- 3GPP. Study on Enhanced Application Architecture for UAS Applications; Technical Report TR 23.700-55; Version 18.0.0; 3rd Generation Partnership Project: Valbonne, France, 2022; Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3945 (accessed on 29 May 2023).
- 3GPP. Study on Security Aspects of Uncrewed Aerial Systems (UAS); Technical Report TR 33.854; Version 17.1.0; 3rd Generation Partnership Project: Valbonne, France, 2021; Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3763 (accessed on 29 May 2023).
- Technical Standard TS 33.256; Security Aspects of Uncrewed Aerial Systems (UAS); Version 17.3.0. 3rd Generation Partnership Project: Valbonne, France, 2023. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3930 (accessed on 29 May 2023).
- 3GPP. Study on Security of Architecture Enhancements for UAS, UAV and UAM; Technical Report TR 33.891; Version 18.0.0; 3rd Generation Partnership Project: Valbonne, France, 2023; Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=4083 (accessed on 29 May 2023).
- Technical Standard TS 29.256; Uncrewed Aerial Systems Network Function (UAS-NF);Aerial Management Services; Stage 3; Ver. 18.1.0. 3rd Generation Partnership Project: Valbonne, France, 2023. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3866 (accessed on 29 May 2023).
- Technical Standard TS 29.255Uncrewed Aerial System Service Supplier (USS) Services; Stage 3; Version 18.1.0; 3rd Generation Partnership Project: Valbonne, France, 2023; Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3904 (accessed on 29 May 2023).
- 3GPP. Release 17 Description; Summary of Rel-17 Work Items; Technical Report TR 21.917; Version 17.0.1; 3rd Generation Partnership Project: Valbonne, France, 2023; Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3937 (accessed on 29 May 2023).
- 3GPP. NR Support for UAVs. Available online: https://www.3gpp.org/technologies/nr-uav/ (accessed on 29 May 2023).
- 5G!Drones: Unmanned Aerial Vehicle Vertical Applications’ Trials Leveraging Advanced 5G Facilities. Available online: https://5gdrones.eu (accessed on 29 May 2023).
- Tomaszewski, L.; Kołakowski, R.; Kukliński, S. Integration of U-space and 5GS for UAV services. In Proceedings of the 2020 IFIP Networking Conference (Networking), Paris, France, 22–25 June 2020; pp. 767–772. Available online: https://ieeexplore.ieee.org/document/9142706 (accessed on 29 May 2023).
- Tomaszewski, L.; Kołakowski, R.; Korzec, P. On 5G Support of Cross-Border UAV Operations. In Proceedings of the 2020 IEEE International Conference on Communications Workshops (ICC Workshops), Dublin, Ireland, 7–11 June 2020; pp. 1–6. [Google Scholar] [CrossRef]
- PriMO-5G: Virtual Presence in Moving Objects through 5G. Available online: https://primo-5g.eu/ (accessed on 29 May 2023).
- GOF 2.0 Integrated Urban Airspace Validation. Available online: https://gof2.eu/project (accessed on 29 May 2023).
- GOF 2.0 Consortium. Validation of Integrated Multi-stakeholder Architecture for UAS Traffic Management: GOF 2.0 Integrated Urban Airspace. White Paper. 2022. Available online: https://gof2.eu/wp-content/uploads/2022/12/GOF2.0-white-paper.pdf (accessed on 29 May 2023).
- MITRE Engenuity. Open Generation Uncrewed Aircraft Systems (UAS) Use Cases. Report, Next Generation Mobile Networks. 2022. Available online: https://f.hubspotusercontent20.net/hubfs/7754670/Open_Generation/Open%20Gen%20Reports/ME_OpenGen_UAS_UseCases_Feb2022.pdf (accessed on 29 May 2023).
- ACJA. Aerial Connectivity Joint Activity (ACJA) Resources. Available online: https://www.gsma.com/iot/advanced-air-mobility-resources/ (accessed on 29 May 2023).
- Tomaszewski, L.; Kołakowski, R. Network Slicing vs. Network Neutrality—Is Consent Possible? In Proceedings of the Artificial Intelligence Applications and Innovations; AIAI 2023 IFIP WG 12.5 International Workshops, León, Spain, 14–17 June 2023; Maglogiannis, I., Iliadis, L., Papaleonidas, A., Chochliouros, I., Eds.; Springer Nature Switzerland: Cham, Switzerland, 2023; pp. 77–90. [Google Scholar] [CrossRef]
- ETSI. Network Functions Virtualisation (NFV); Management and Orchestration; Group Specification ETSI GS NFV-MAN 001 V1.1.1; European Telecommunications Standards Institute: Valbonne, France, 2014; Available online: https://www.etsi.org/deliver/etsi_gs/nfv/001_099/001/01.01.01_60/gs_nfv001v010101p.pdf (accessed on 29 May 2023).
- ITU-R. IMT Vision–Framework and Overall Objectives of the Future Development of IMT for 2020 and Beyond; Recommendation ITU-R M.2083-0 (09/15); International Telecommunication Union—Radiocommunication Sector: Geneva, Switzerland, 2015; Available online: https://www.itu.int/rec/R-REC-M.2083-0-201509-I/ (accessed on 29 May 2023).
- ITU-R. Minimum Requirements Related to Technical Performance for IMT-2020 Radio Interface(s); Report ITU-R M.2410-0 (11/17); International Telecommunication Union—Radiocommunication Sector: Geneva, Switzerland, 2017; Available online: https://www.itu.int/pub/R-REP-M.2410-2017 (accessed on 29 May 2023).
- Technical Standard TS 23.501; System Architecture for the 5G System (5GS); Version 18.2.2. 3rd Generation Partnership Project: Valbonne, France, 2023. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3144 (accessed on 29 May 2023).
- Technical Standard TS 23.273; 5G System (5GS) Location Services (LCS); Stage 2; Version 18.2.0. 3rd Generation Partnership Project: Valbonne, France, 2023. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3577 (accessed on 29 May 2023).
- Technical Standard TS 23.548; 5G System Enhancements for Edge Computing; Stage 2; Version 18.2.0. 3rd Generation Partnership Project: Valbonne, France, 2023. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3856 (accessed on 29 May 2023).
- Technical Standard TS 23.222; Common API Framework for 3GPP Northbound APIs; Version 18.2.0. 3rd Generation Partnership Project: Valbonne, France, 2023. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3337 (accessed on 29 May 2023).
- Technical Standard TS 23.434; Service Enabler Architecture Layer for Verticals (SEAL); Functional Architecture and Information Flows; Version 18.5.0. 3rd Generation Partnership Project: Valbonne, France, 2023. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3587 (accessed on 29 May 2023).
- Technical Standard TS 23.558; Architecture for Enabling Edge Applications; Version 18.3.0. 3rd Generation Partnership Project: Valbonne, France, 2023. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3723 (accessed on 29 May 2023).
- ETSI. Multi-access Edge Computing (MEC); Radio Network Information API; Group Specification ETSI GS MEC 012 V2.2.1; European Telecommunications Standards Institute: Valbonne, France, 2022; Available online: https://www.etsi.org/deliver/etsi_gs/MEC/001_099/012/02.02.01_60/gs_mec012v020201p.pdf (accessed on 29 May 2023).
- ETSI. Multi-Access Edge Computing (MEC); Location API; Group Specification ETSI GS MEC 013 V3.1.1; European Telecommunications Standards Institute: Valbonne, France, 2023; Available online: https://www.etsi.org/deliver/etsi_gs/MEC/001_099/013/03.01.01_60/gs_mec013v030101p.pdf (accessed on 29 May 2023).
- ETSI. Multi-Access Edge Computing (MEC); UE Identity API; Group Specification ETSI GS MEC 014 V3.1.1; European Telecommunications Standards Institute: Valbonne, France, 2023; Available online: https://www.etsi.org/deliver/etsi_gs/MEC/001_099/014/03.01.01_60/gs_mec014v030101p.pdf (accessed on 29 May 2023).
- ETSI. Multi-Access Edge Computing (MEC); Traffic Management APIs; Group Specification ETSI GS MEC 015 V2.2.1; European Telecommunications Standards Institute: Valbonne, France, 2022; Available online: https://www.etsi.org/deliver/etsi_gs/MEC/001_099/015/02.02.01_60/gs_mec015v020201p.pdf (accessed on 29 May 2023).
- 3GPP. Study on Using Satellite Access in 5G; Technical Report TR 22.822; Version 16.0.0; 3rd Generation Partnership Project: Valbonne, France, 2018; Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3372 (accessed on 29 May 2023).
- Technical Standard TS 22.261; Service Requirements for the 5G System; Stage 1; Version 19.3.0. 3rd Generation Partnership Project: Valbonne, France, 2023. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3107 (accessed on 29 May 2023).
- Technical Standard TS 38.300; NR; NR and NG-RAN Overall Description; Stage-2; Version 17.5.0. 3rd Generation Partnership Project: Valbonne, France, 2023. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3191 (accessed on 29 May 2023).
- 3GPP. Guidelines for Extraterritorial 5G Systems (5GS); Technical Report TR 22.926; Version 18.0.0; 3rd Generation Partnership Project: Valbonne, France, 2021; Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3722 (accessed on 29 May 2023).
- 3GPP. Study on Satellite Access—Phase 3; Technical Report TR 22.865; Version 19.0.0; 3rd Generation Partnership Project: Valbonne, France, 2023; Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=4089 (accessed on 29 May 2023).
- Technical Standard TS 38.101-1; NR; User Equipment (UE) Radio Transmission and Reception; Part 1: Range 1 Standalone; Version 18.2.0. 3rd Generation Partnership Project: Valbonne, France, 2023. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3283 (accessed on 29 May 2023).
- Technical Standard TS 38.101-2; NR; User Equipment (UE) Radio Transmission and Reception; Part 2: Range 2 Standalone; Version 18.2.0. 3rd Generation Partnership Project: Valbonne, France, 2023. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3284 (accessed on 29 May 2023).
- ITU-R. Technical Feasibility of IMT in Bands above 6 GHz. Recommendation ITU-R M.2376-0 (07/2015), International Telecommunication Union—Radiocommunication Sector. 2015. Available online: https://www.itu.int/pub/R-REP-M.2376-2015 (accessed on 29 May 2023).
- GSMA. 5G Spectrum: GSMA Public Policy Position; Position Report; GSM Association: London, UK, 2022; Available online: https://www.gsma.com/spectrum/wp-content/uploads/2022/06/5G-Spectrum-Positions.pdf (accessed on 29 May 2023).
- O-RAN Alliance. O-RAN Use Cases and Deployment Scenarios. White Paper, Open RAN Alliance. 2020. Available online: https://assets-global.website-files.com/60b4ffd4ca081979751b5ed2/60e5aff9fc5c8d496515d7fe_O-RAN%2BUse%2BCases%2Band%2BDeployment%2BScenarios%2BWhitepaper%2BFebruary%2B2020.pdf (accessed on 29 May 2023).
- NGMN. NGMN 6G Drivers and Vision. White Paper Version 1.0, Next Generation Mobile Networks. 2021. Available online: https://www.ngmn.org/wp-content/uploads/NGMN-6G-Drivers-and-Vision-V1.0_final_New.pdf (accessed on 29 May 2023).
- Magedanz, T.; Corici, M.I. Getting ready for 6G Research—Understanding Technological Drivers towards 6G and emerging 6G Management Requirements. Tutorial at IEEE/IFIP NOMS, 25 April 2022, Fraunhofer FOKUS: Berlin, Germany, 2022. Available online: https://owncloud.fokus.fraunhofer.de/index.php/s/4oIylfMlANQTZCB/download (accessed on 29 May 2023).
- Imoize, A.L.; Adedeji, O.; Tandiya, N.; Shetty, S. 6G Enabled Smart Infrastructure for Sustainable Society: Opportunities, Challenges, and Research Roadmap. Sensors 2021, 21, 1709. [Google Scholar] [CrossRef]
- Saad, W.; Bennis, M.; Chen, M. A Vision of 6G Wireless Systems: Applications, Trends, Technologies, and Open Research Problems. IEEE Netw. 2020, 34, 134–142. [Google Scholar] [CrossRef]
- NGMN. 6G Use Cases and Analysis. White Paper Version 1.0, Next Generation Mobile Networks. 2022. Available online: https://www.ngmn.org/wp-content/uploads/220222-NGMN-6G-Use-Cases-and-Analysis-1.pdf (accessed on 29 May 2023).
- Liu, G.; Huang, Y.; Li, N.; Dong, J.; Jin, J.; Wang, Q.; Li, N. Vision, requirements and network architecture of 6G mobile network beyond 2030. China Commun. 2020, 17, 92–104. [Google Scholar] [CrossRef]
- Mahmood, N.; Böcker, S.; Munari, A.; Clazzer, F.; Moerman, I.; Mikhaylov, K.; Alcaraz López, O.; Park, O.S.; Mercier, E.; Bartz, H.; et al. White Paper on Critical and Massive Machine Type Communication Towards 6G. In 6G Research Visions; University of Oulu: Oulu, Finland, 2020; Volume 11, Available online: http://urn.fi/urn:isbn:9789526226781 (accessed on 29 May 2023).
- Alves, H.; Jo, G.D.; Shin, J.; Yeh, C.; Mahmood, N.H.; Lima, C.; Yoon, C.; Rahatheva, N.; Park, O.S.; Kim, S.; et al. Beyond 5G URLLC Evolution: New Service Modes and Practical Considerations. arXiv 2021, arXiv:2106.11825. [Google Scholar] [CrossRef]
- Zhou, Y.; Liu, L.; Wang, L.; Hui, N.; Cui, X.; Wu, J.; Peng, Y.; Qi, Y.; Xing, C. Service-aware 6G: An intelligent and open network based on the convergence of communication, computing and caching. Digit. Commun. Netw. 2020, 6, 253–260. [Google Scholar] [CrossRef]
- Cui, Y.; Liu, F.; Jing, X.; Mu, J. Integrating Sensing and Communications for Ubiquitous IoT: Applications, Trends, and Challenges. IEEE Netw. 2021, 35, 158–167. [Google Scholar] [CrossRef]
- Liu, F.; Cui, Y.; Masouros, C.; Xu, J.; Han, T.X.; Eldar, Y.C.; Buzzi, S. Integrated Sensing and Communications: Toward Dual-Functional Wireless Networks for 6G and Beyond. IEEE J. Sel. Areas Commun. 2022, 40, 1728–1767. [Google Scholar] [CrossRef]
- ETSI. Zero Touch Network & Service Management (ZSM). Available online: https://www.etsi.org/committee/zsm (accessed on 29 May 2023).
- ETSI. Experiential Networked Intelligence (ENI). Available online: https://www.etsi.org/committee/1423-eni (accessed on 29 May 2023).
- Araniti, G.; Iera, A.; Pizzi, S.; Rinaldi, F. Toward 6G Non-Terrestrial Networks. IEEE Netw. 2022, 36, 113–120. [Google Scholar] [CrossRef]
- Zhang, Z.; Xiao, Y.; Ma, Z.; Xiao, M.; Ding, Z.; Lei, X.; Karagiannidis, G.K.; Fan, P. 6G Wireless Networks: Vision, Requirements, Architecture, and Key Technologies. IEEE Veh. Technol. Mag. 2019, 14, 28–41. [Google Scholar] [CrossRef]
- 3GPP. Solutions for NR to Support Non-Terrestrial Networks (NTN); Technical Report TR 38.821; Version 16.2.0; 3rd Generation Partnership Project: Valbonne, France, 2023; Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3525 (accessed on 29 May 2023).
- Shi, J.; Li, Z.; Hu, J.; Tie, Z.; Li, S.; Liang, W.; Ding, Z. OTFS enabled LEO Satellite Communications: A Promising Solution to Severe Doppler Effects. IEEE Netw. 2023, 1–7. [Google Scholar] [CrossRef]
- Tomaszewski, L.; Kołakowski, R.; Mesodiakaki, A.; Ntontin, K.; Antonopoulos, A.; Pappas, N.; Fiore, M.; Mosahebfard, M.; Watts, S.; Harris, P.; et al. ETHER: Energy- and Cost-Efficient Framework for Seamless Connectivity over the Integrated Terrestrial and Non-terrestrial 6G Networks. In Proceedings of the Artificial Intelligence Applications and Innovations, AIAI 2023 IFIP WG 12.5 International Workshops, León, Spain, 14–17 June 2023; Maglogiannis, I., Iliadis, L., Papaleonidas, A., Chochliouros, I., Eds.; Springer Nature Switzerland: Cham, Switzerland, 2023; Volume 677, pp. 32–44. [Google Scholar] [CrossRef]
- Corici, M.I.; Franke, N.; Heyn, T.; Kontes, G.; Leyh, M.; Magedanz, T.; Maaß, U.; Mikulla, M.; Niemann, B.; Peter, M.; et al. On the Road to 6G: Drivers, Challenges and Enabling Technologies. White Paper Version 1.0, Fraunhofer FOKUS: Berlin, Germany. 2021. Available online: https://cdn0.scrvt.com/fokus/137064883186fe80/9a009606e5a4/6g-sentinel-white-paper.pdf (accessed on 29 May 2023).
- HEXA-X Project. Gaps, Features and Enablers for B5G/6G Service Management and Orchestration. Project Deliverable D6.1, HEXA-X: A Flagship for B5G/6G Vision and Intelligent Fabric of Technology Enablers Connecting Human, Physical, and Digital Worlds. 2021. Available online: https://hexa-x.eu/wp-content/uploads/2021/06/Hexa-X_D6.1.pdf (accessed on 29 May 2023).
- Strinati, E.C.; Barbarossa, S.; Gonzalez-Jimenez, J.L.; Kténas, D.; Cassiau, N.; Maret, L.; Dehos, C. 6G: The Next Frontier: From Holographic Messaging to Artificial Intelligence Using Subterahertz and Visible Light Communication. IEEE Veh. Technol. Mag. 2019, 14, 42–50. [Google Scholar] [CrossRef]
- Chen, Y.; Liu, W.; Niu, Z.; Feng, Z.; Hu, Q.; Jiang, T. Pervasive intelligent endogenous 6G wireless systems: Prospects, theories and key technologies. Digit. Commun. Netw. 2020, 6, 312–320. [Google Scholar] [CrossRef]
- Technical Standard TS 22.186; Service Requirements for Enhanced V2X Scenarios; Version 17.0.0. 3rd Generation Partnership Project: Valbonne, France, 2022. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3180 (accessed on 29 May 2023).
- Tomaszewski, L.; Kołakowski, R.; Zagórda, M. Application of Mobile Networks (5G and Beyond) in Precision Agriculture. In Proceedings of the Artificial Intelligence Applications and Innovations, AIAI 2022 IFIP WG 12.5 International Workshops, Hersonissos, Greece, 17–20 June 2022; Maglogiannis, I., Iliadis, L., Macintyre, J., Cortez, P., Eds.; Springer International Publishing: Cham, Switzerland, 2022; Volume 652, pp. 71–86. [Google Scholar] [CrossRef]
- European 5G Scoreboard. Available online: https://5gobservatory.eu/observatory-overview/eu-scoreboard/ (accessed on 29 May 2023).
Figure 1.
3GPP Releases timeline (based on [7,8,9])—green: 5G (Relase 15–Release 17) and 5G Advanced (since Release 18), blue: 6G.

Figure 2.
Reference architecture of the UTM ecosystem and mobile network integration (based on [14]).
Figure 2.
Reference architecture of the UTM ecosystem and mobile network integration (based on [14]).

Figure 3.
3GPP 5GS architectural framework—standalone variant (based on [39]).
Figure 3.
3GPP 5GS architectural framework—standalone variant (based on [39]).
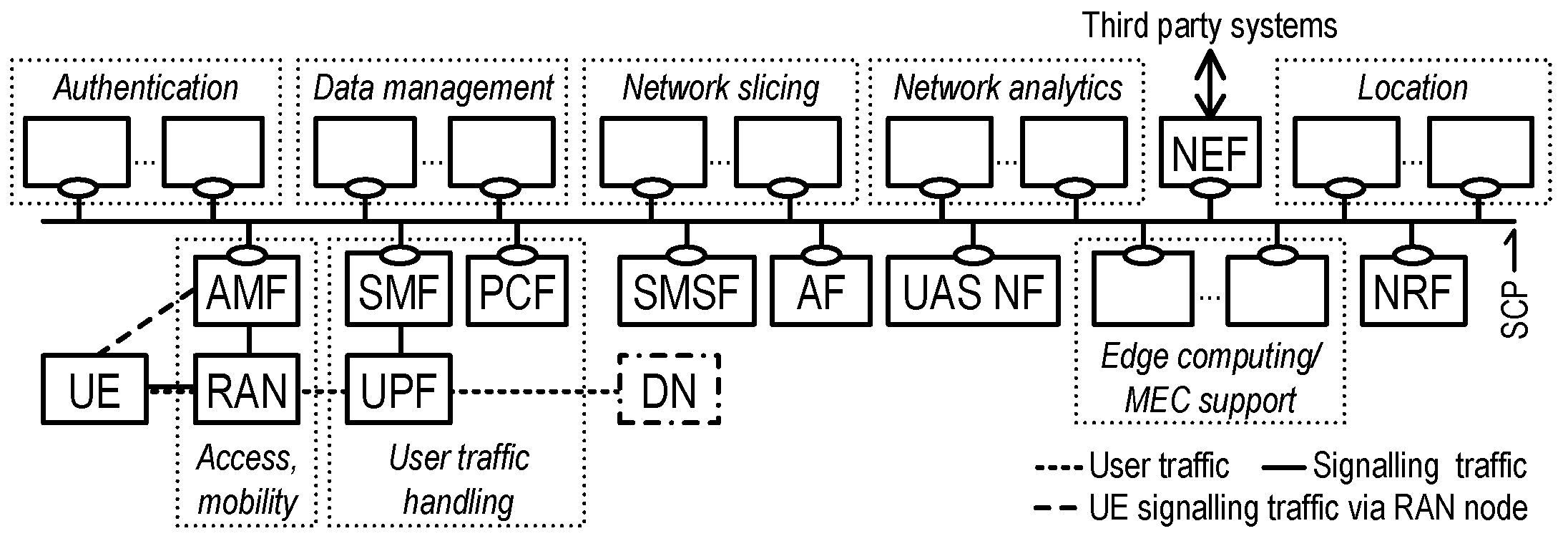

{kind=link}
{kind=link}
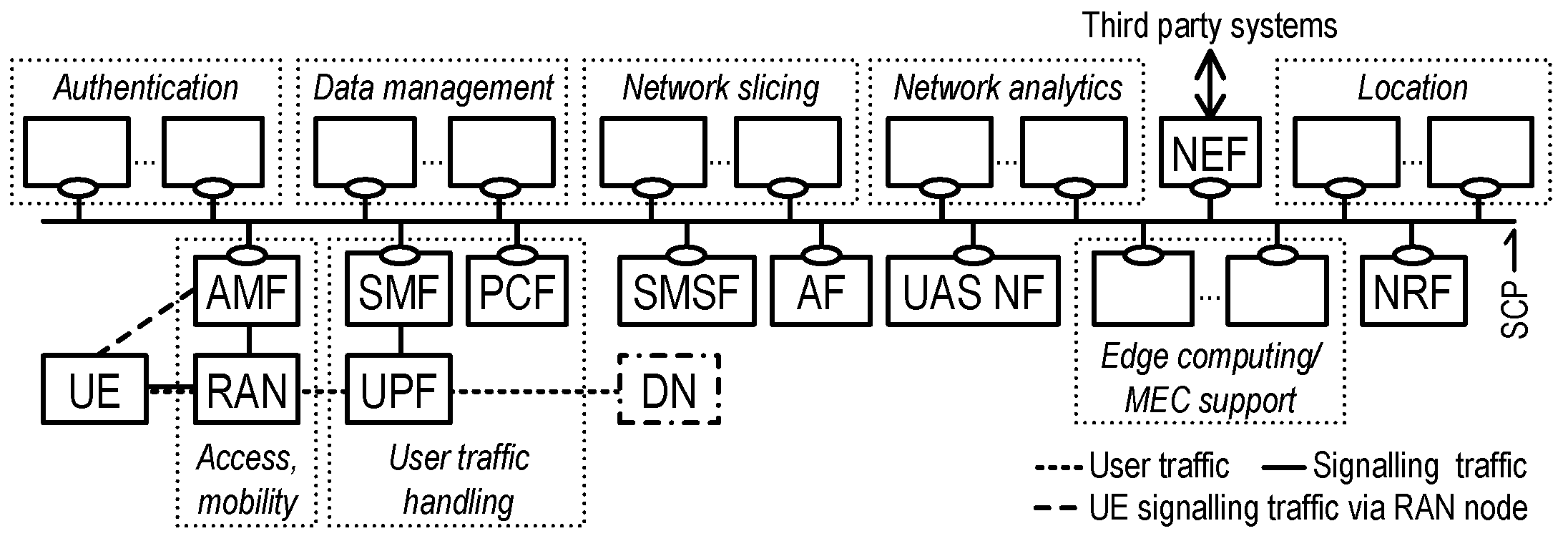{kind=link}
Table 1.
Selected 5GS performance requirements for UAS support according to 3GPP [11].
Table 1.
Selected 5GS performance requirements for UAS support according to 3GPP [11].
| C2 Mode | E2E Latency | Reliability | Maximum UAV Ground Speed |
|---|---|---|---|
| Steer to waypoints | 1 s | 99.9% | 300 km/h |
| Direct stick steering | 40 ms | 99.9% | 60 km/h |
| Automatic flight on UTM | 5 s | 99.9% | 300 km/h |
| Approaching autonomous navigation infrastructure | 10 ms (downlink) 140 ms (uplink) | 99% (downlink) 99.99% (uplink) | 50 km/h |
| Example UAS communication service | E2E latency | Reliability | Data rate |
| UTM to UAS communication | 500 ms | 99.9% | Not specified |
| BVLOS FPV video | 140 ms | 99.99% | 4 Mbps (uplink) at 720 p, 30 fps |
| 4 × 4 K AI surveillance | 20 ms | Not specified | 50 Mbps (downlink) 120 Mbps (uplink) |
Table 2.
Summary of dedicated UAS support roadmap in 3GPP releases (based on [13,18,19,25,26], features’ availability details in the text).
| Feature | Release ID |
|---|---|
| UAV remote identification | Release 17 |
| Joint PLMN and UTM authentication and authorisation of UAV | |
| Authorisation of C2 communication | |
| UAV location reporting and tracking | |
| Communication between UAVs within a defined proximity area | |
| Pairing of UAV with its GCS (also cross-PLMN) | |
| Provisioning of C2 communication QoS for UAS | |
| C2 communication mode selection and switching | |
| RT UAV connection status monitoring and location reporting | |
| Direct UAV–UAV or UAV–GCS communication over direct UE–UE connection | Release 18 |
| Support of UAV interaction with multiple UTM during a flight | |
| Support of DAA services | |
| Transport of C2 communication over direct UE–UE connection | |
| Broadcasting of UAV remote identification over direct UE–UE connection | |
| Support of DAA mechanism over direct UE–UE connection | |
| Enhancements of signal measurement reporting by UAV UE to 5G base station considering UAV specificity (including reporting of altitude, location, and speed) | |
| Flight path reporting by UAV to 5G base station for radio resource planning aid | |
| Study of beamforming support at UAV UE side (in 410–7125 MHz range) | |
| Detection of UE with UAV-specific additional features | Release 19 |
| Responding flight feasibility query from UTM by PLMN | |
| Geofencing for VLOS UAV missions | |
| DAA support by PLMN (reporting relative distance between UAVs to UTM) | |
| PLMN as location, identity, and sensing information source on UTM request | |
| Support for UAV in-flight operations with RT monitoring of C2 link along the route | |
| PLMN as a sensor of aerial traffic of UAVs for UTM |
Table 3.
Comparison of 5G and 6G target KPIs.
| Network Performance Requirement | 5G KPI | 6G KPI |
|---|---|---|
| Peak downlink data rate [64] | 20 Gbps | 1–10 Tbps |
| Peak uplink data rate [64] | 10 Gbps | 1–10 Tbps |
| Experienced downlink | ||
| data rate [64] | 100 Mbps | 10–100 Gbps |
| Experienced uplink | ||
| data rate [64] | 50 Mbps | 10–100 Gbps |
| CP delay [64] | 10 ms | 1 ms |
| UP delay [64,79] | 1 ms | 0.1 ms |
| Delay jitter [79] | – | 1 s |
| Connection density [64] | 106 dev./km2 | 107–108 dev./km3 |
| Traffic capacity [64] | 10 Mbps/m2 | 0.1–10 Gbps/m2 |
| Reliability [64] | 99.999% | 99.99999% |
| Spectral efficiency [80] | 30 bps/Hz | 100 bps/Hz |
| Mobility support [80] | 500 km/h | 1000 km/s |
| Positioning accuracy [64] | meter-level | sub-meter level (outdoor), centimeter-level (indoor) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Tomaszewski, L.; Kołakowski, R. Advanced Air Mobility and Evolution of Mobile Networks. Drones 2023, 7, 556. https://doi.org/10.3390/drones7090556
AMA Style
Tomaszewski L, Kołakowski R. Advanced Air Mobility and Evolution of Mobile Networks. Drones. 2023; 7(9):556. https://doi.org/10.3390/drones7090556
Chicago/Turabian StyleTomaszewski, Lechosław, and Robert Kołakowski. 2023. "Advanced Air Mobility and Evolution of Mobile Networks" Drones 7, no. 9: 556. https://doi.org/10.3390/drones7090556