1. Introduction
In recent decades, the application of unmanned autonomous helicopters (UAH) in different fields has been rapidly promoted. Due to the universality and specific advantages of the UAH, more and more researchers focus on this area, and many studies have been carried out [
1,
2,
3,
4,
5,
6,
7]. The authors used a multicriteria decision support method to model the unmanned helicopter in [
1]. In [
3], the authors introduced the nonlinear model of vario scale model helicopters and the establishment of a nonlinear control strategy. The authors in [
4] combined the traditional backstepping method with the inner loop decoupling structure, which reduces the conservative design of the controller. In view of the inherent instability and strong nonlinear and coupling characteristics of small-scale UAHs, a nonlinear optimal control scheme was proposed in [
6]. A special backstepping approach with inverse solution technique was investigated for a UAH system in [
8], and has been widely adopted according to its flexible and effective controller design process. Furthermore, many characteristics, which are widely found in UAH, need to be considered, i.e., performance indexes, modeling uncertainties, and external disturbances.
Based on the fractional-order sliding mode control (SMC) method, the authors in [
9] solved the external disturbances well. In addition, the extended state observer (ESO) was first proposed to compensate the uncertainties for nonlinear systems in [
10]. Gradually, due to its strong approximation and lower dependence on plant information, the ESO-based control strategy was utilized widely to estimate not only the uncertainties [
11,
12] but also the unmeasured system states [
13], external disturbances [
7,
14,
15], and all sorts of combinations of the above [
16,
17]. In [
7], by combining with the ESO, the SMC combined with a fault-tolerant control approach was developed for UAHs under wind disturbances. The authors proposed the fault-tolerant-based SMC scheme for the helicopter, and the ESO was used to solve the unknown wind gusts in [
14]. In [
18], the ESO technique was utilized for handling unmodeled disturbances for hydraulic system. However, the computing complexity will be increased dramatically by repeated differentiation.
To reduce the computing complexity, the command filter technique [
19,
20] was proposed. Due to the avoidance of differentiation and the satisfaction of estimation effect, command-filtered backstepping technologies are widely adopted in a number of control schemes [
21,
22,
23,
24,
25]. In [
26], based the backstepping technique, a finite-time command-filtered control scheme was adopted for quadcopter UAVs, and the problem of integration explosion was handled well. The command filtering technique was combined with the barrier Lyapunov function for the synchronous motor system in [
27] Furthermore, besides the external disturbances, the UAH is usually subjected to state constraints when performing specific tasks, i.e., space prospecting in undetectable space [
28], forest-fire monitoring [
29], and so on.
During the flight process, the UAH system could suffer various path constraints because of the complex geography and specific mission requirements. How to guarantee the tracking performance of presupposed reference trajectory based on the safety requirements under path constraints needs to be further studied. The authors in [
30] adopted the MPC method to accomplish the collision avoidance for the UAH. Employing the dynamic surface control (DSC) technique, the authors used a barrier Lyapunov function to prove the stability for an ammunition manipulator electrohydraulic system in [
31]. Considering the prescribed performance, an adaptive fault-tolerant control scheme was investigated for a constrained UAH in [
32].
Generally speaking, due to the changing environments and the special mission requirements, those path constraints are time-varying and cannot be predicted in advance in most situations. From a strategy of fixing desired trajectory, an obstacle avoidance method [
33] was adopted in [
34]. Similarly, the authors in [
35] proposed a safe protection algorithm (SPA) to generate the safe desired signal for the unmanned helicopter.
This manuscript develops the SPA, which includes the predictive mechanism, to calculate a new safe reference trajectory within the real-time path constraints. A command-filtered backstepping method is utilized for tackling the problem of the piecewise differentiability of the constrained desired trajectory and the repeated derivation of the virtual control laws. Moreover, an ESO method is adopted to compensate unknown disturbances. The main contributions are illustrated as follows:
A developed SPA with predictive characteristic is developed to obtain a new desired trajectory, which takes the time-varying path constraints into account. The path constraints violation can be detected earlier due to the predictive mechanism.
The combination of the ESO and the command-filtered backstepping method is introduced to ensure that the generated safety trajectory is continuously differentiable, and the use of the command filter greatly reduces the computational complexity caused by the ESO.
According to Lyapunov stability analysis, the signals of the UAH system are bounded, which means the UAH can track the presupposed desired trajectory on the basis of the safety requirement under path constraints and external disturbances.
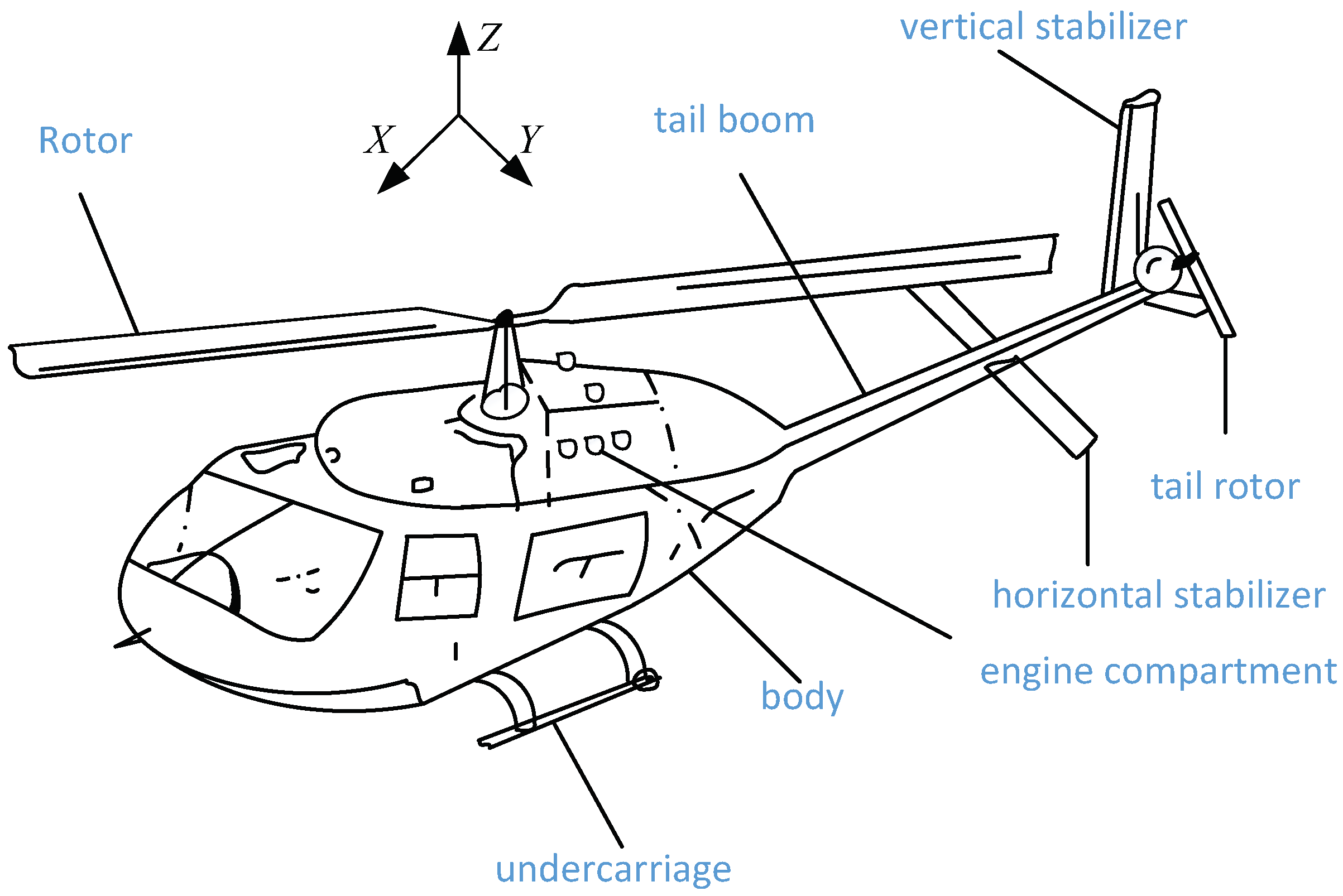
The remainder of this article consists of the following. In
Section 2, the dynamics of the 14-state UAH and the problem formulation are detailed. In
Section 3, the ESO-based command-filtered safe tracking control scheme is proposed. In
Section 4, the performance of the proposed controller is verified by simulations. The conclusions are drawn in
Section 5.
Notations: and represent the identity matrix and the zero matrix or vector with the dimension n, respectively. , denotes its r-th-order time derivative. denotes that A is a positive definite matrix.
3. ESO-Based Command-Filtered Safe Flight Control Scheme Design
In this section, an ESO-based command-filtered safe flight control scheme is investigated. As shown in
Figure 2, the control system block diagram includes the following three parts: a safe reference trajectory design, an ESO-based command-filtered safe flight controller, and a 14-state UAH model.
3.1. Safe Reference Trajectory Design
Based on the reference path under Assumption 3 and its smooth safe boundaries , a safe protection algorithm (SPA) is introduced in generating a safe reference path , which is strictly restricted in the time-varying position boundaries with the design margins.
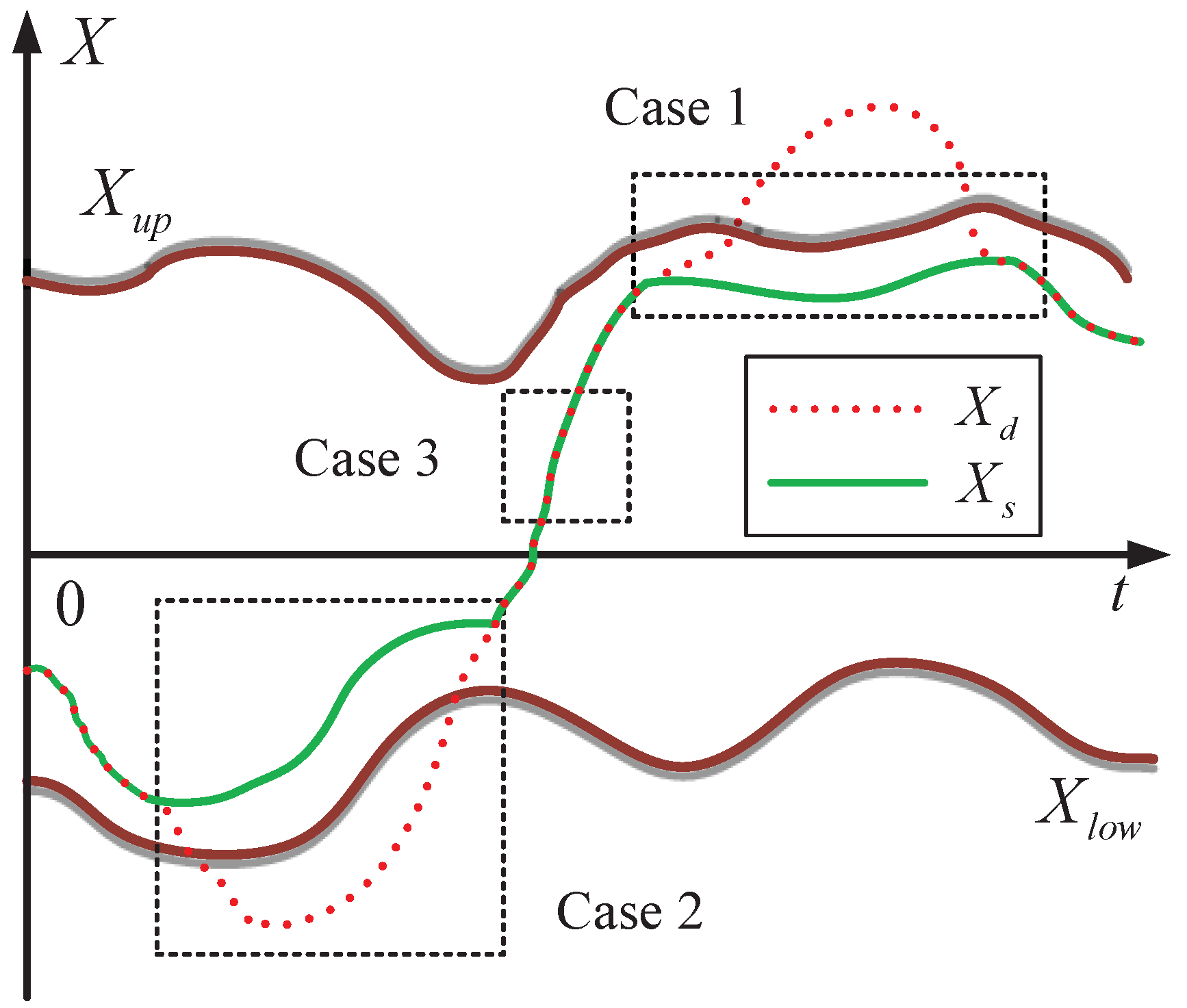
Without loss of generality, the position of the UAH in the
X-axis is taken as an example and the generation of
is illustrated in
Figure 3, where the red dotted line is the original expected signal, the brown solid line is the safety boundary, and the green solid line is the safety expectation signal generated according to the original expected signal and the safety boundary. Define the time-varying margin in the following form:
where
denotes a design constant, whose choice is related to tracking performance and system safety.
In order to give the predictive property to the SPA, the real-time predicted time
associated with
,
, and
is expressed by
where
where
stands for
is the maximum predict time to be designed. Combining (11) with (10), one can obtain that the following equation:
always holds; namely,
is the maximum of time-varying predicted time
.
Different from
, the values of
and
at time
t cannot be obtained directly; the related estimation needs to be introduced. By assuming that
(
) evolves by a constant rate, the predictive value at time
is given as
where
is the time derivative of
by the first-order differentiator [
9].
For written convenience,
, define
where
. Accordingly, the real-time safety margins
,
are calculated by
Remark 2. is constrained within , which can ensure that the conditions of Case I and II in Figure 3 cannot be satisfied simultaneously. In order to add the predictive mechanism of SPA, the path constraints violation at time should be discussed; and its derivatives can be calculated by following three cases:
To keep the safe reference trajectory
within upper path constraint
,
is calculated by
To keep the safe reference trajectory
within lower path constraint
,
is calculated by
In other words,
is calculated by
The judgment of the violation can be illustrated in
Figure 4, and the calculation of the real-time safety margins
,
in (
14) have been shown intuitively in
Figure 5. In
Figure 5, the red dashed line is the original expected signal, the orange solid line is the safety boundary, and the green solid line is the generated safety expected signal. Invoking (
15)–(
17), the safe reference path
can be obtained as follows:
The boundedness of can be proved as the following theorem.
Theorem 1. , if , the safe reference trajectory can be constrained in the real-time interval under a design minimum margin satisfying Proof of Theorem 1. In light of (
8)–(
13),
, we can obtain that
with
.
It follows from (
10), (
14), (
19), and (
20) that
with
.
Considering (
18), we can obtain that if
,
can be guaranteed in the interval
for all
with a design minimum margin
.
This concludes the proof. □
It follows from Theorem 1 that the safe reference path can be restricted in the safe boundaries and with a safety margin . Moreover, the same process can be designed for Y and Z. Thus, the safe reference paths , and their time derivatives , , and can also be calculated with the safety margins , by designing the design constants , .
In accordance with Assumptions 3 and 4, Theorem 1, and (
18), we can obtain that
is bounded. Namely,
where
represents a positive constraint.
3.2. Design of the Command Filters
In order to handle the safe reference path and the virtual control signals , , , and to be designed later, the command filter technology is introduced.
Firstly, the tracking error vectors are designed as
and the error compensations for command filter as
where
,
,
,
,
denote the outputs of the command filters with
,
,
,
,
being the inputs and
being the compensating signals.
For the safe reference path
, the command filter is constructed as
where
denotes the auxiliary variable of the command filter,
represents a design matrix and
is a design constant. In addition,
and
,
,
, and
are the virtual control signals. To reduce computational complexity, the command filters are designed as
and
where
, and
denote auxiliary variables;
, and
denote the design diagonal positive definite matrices, design constants; and
are constants to be designed.
,
,
,
,
,
.
For removing the effect of the errors between the outputs and inputs of designed command filters, the compensating signals are designed as
where
denotes the positive definite matrices with compatible dimensions to be designed and
, (i=1,2, 3, 4),
.
According to Lemma 1, the tracking errors of the designed command filters (
25)–(
29) can be converged to an arbitrary small field by choosing appropriate parameters. Namely, by choosing
,
,
,
,
,
,
,
,
, and
, one has
where
are positive constants.
Furthermore,
is bounded, which holds [
20]
where
3.3. ESO-Based Command-Filtered Safe Flight Controller Design in Position Subsystem
Considering (
3) and (
24), we have
The virtual controller is given by
where
is a matrix with compatible dimensions to be designed. Substituting (
33) to (
32) yields
Differentiating
yields
Considering (
3), to estimate the unknown disturbance, an ESO is introduced. Defining
is the ESO auxiliary variable and taking
as an extended state with a design positive definite matrix
, (
3) can be extended as
where
and
represent the estimations of
v and
, respectively.
and
denote the estimation errors.
,
, and
are design positive definite symmetric matrices with corresponding dimension.
Considering (
3), (
24) and (
36), the time derivatives of estimation error are given as
By defining
, one has
where
Here, by choosing approximate design positive definite matrices
,
, and
, the matrix
can be ensured to be Hurwitz. There exists a symmetric positive definite matrix
such that
where
denotes a matrix.
The actual controller
u is selected as follows:
where
is a matrix with compatible dimensions to be designed.
Defining
and considering (
40) with
, one can obtain
where
are the desired signals.
Accordingly, the main rotor force
is given by
The candidate Lyapunov function
is chosen as
Through recalling (
34), (
36), (
39), and (
40), the time derivative of
yields
Consider the following facts that
where
are the constants to be designed.
Thus, (
44) can be rewritten as
3.4. ESO-Based Command-Filtered Safe Flight Controller Design in Attitude Subsystem
Considering (
4) and (
24), we have
The virtual controller is given by
where
is a matrix with compatible dimensions to be designed. Substituting (
47) to (
46) yields
Recalling (
4) and (
24) yields
To estimate the unknown disturbance
, we take
as an extended state of the subsystem of the attitude loop. Defining
as the auxiliary valuable of ESO and letting
with a design positive definite matrix
, (
4) can be extended as
where
is the auxiliary variable of ESO, and
and
represent the estimations of
and
, respectively.
and
denote the estimation errors.
and
are design matrices.
Considering (
4), (
24), and (
50) yields
Defining
, one has
where
Here, by choosing approximate positive definite matrices
,
, and
, the matrix
can be ensured to be Hurwitz, that is, there exists a symmetric positive definite matrix
such that
where
is a matrix.
Combining with the ESO (
50), the controller in attitude subsystem is designed as
where
is a matrix with compatible dimensions to be designed.
Define
. It follows from (
2) and (
54) that the tail rotor force
that
The inverse solution of the desired signals in the rotor flapping subsystem
can be expressed by [
4]
The candidate Lyapunov function
is selected by
According to (
48), (
49), (
53), and (
54), the time derivative of
can be obtained as
where
represents a design constant.
3.5. ESO-Based Command-Filtered Safe Tracking Controller Design in Rotor Flapping Subsystem
Recalling (
5) and (
24), we have
To estimate the unknown disturbance
, we define
as the auxiliable variable of ESO and take
as an extended state of the subsystem of the rotor flapping loop. Letting
with a design positive definite matrix
, (
4) can be extended as
where
represents the auxiliary variable of ESO, and
and
are the estimates of
and
, respectively.
and
denote the estimation errors.
and
are design matrices.
Considering (
5), (
24), and (
60) yields
Defining
, one has
where
Here, by choosing approximate design positive definite matrices
,
, and
, the matrix
can be ensured to be Hurwitz, that is, there exists a matrix
such that
where
denotes a positive definite matrix.
Combining with the ESO (
60), the controller in the rotor flapping subsystem is given by
where
is a matrix with compatible dimensions to be designed.
The candidate Lyapunov function
is chosen as
Through recalling (
59), (
63), and (
64), the time derivative of
yields
where
is a constant to be designed.
3.6. Boundedness and Safety Analysis
In this subsection, an ESO-based command-filtered safe flight control scheme for a 14-state UAH system under time-varying path constraints and disturbances can be summarized as a theorem, and the boundedness and safety of the UAH system are analyzed.
Theorem 2. Considering (1), a safe reference trajectory and their time derivatives are calculated by (18) and smoothed by a command filter (25). The command filters are constructed by (25)–(29), and the ESOs are constructed by (36), (50), and (60). The controllers of three subsystems are designed as (40), (54), and (64), then all signals are bounded. Moreover, P can track on the basis of satisfying the time-varying path constraints. If the path constraints conflict with , the safety of UAH can be guaranteed by selecting appropriate parameters. Proof of Theorem 2. In this section,
W is selected as
Invoking (
45), (
58), and (
66) yields
where
Integration of (
68) yields
The convergence of W can be ensured by choosing parameters , , , , , and satisfying . In other words, the error signals , are uniformly bounded.
Recalling (
31), (
67), and (
71), we have
where
.
Combining (
31) with (
72), by choosing appropriate parameters
,
,
with
satisfying
we can obtain that
P can track
on the basis of satisfying the time-varying path constraints. If the path constraints conflict with
, the safety of UAH can be guaranteed by selecting appropriate parameters.
It concludes the proof. □
4. Numerical Simulations and Analysis
The availability of the proposed control scheme is expressed and analyzed by the numerical simulations in this section. The physical parameters are displayed in
Table 1 [
4].
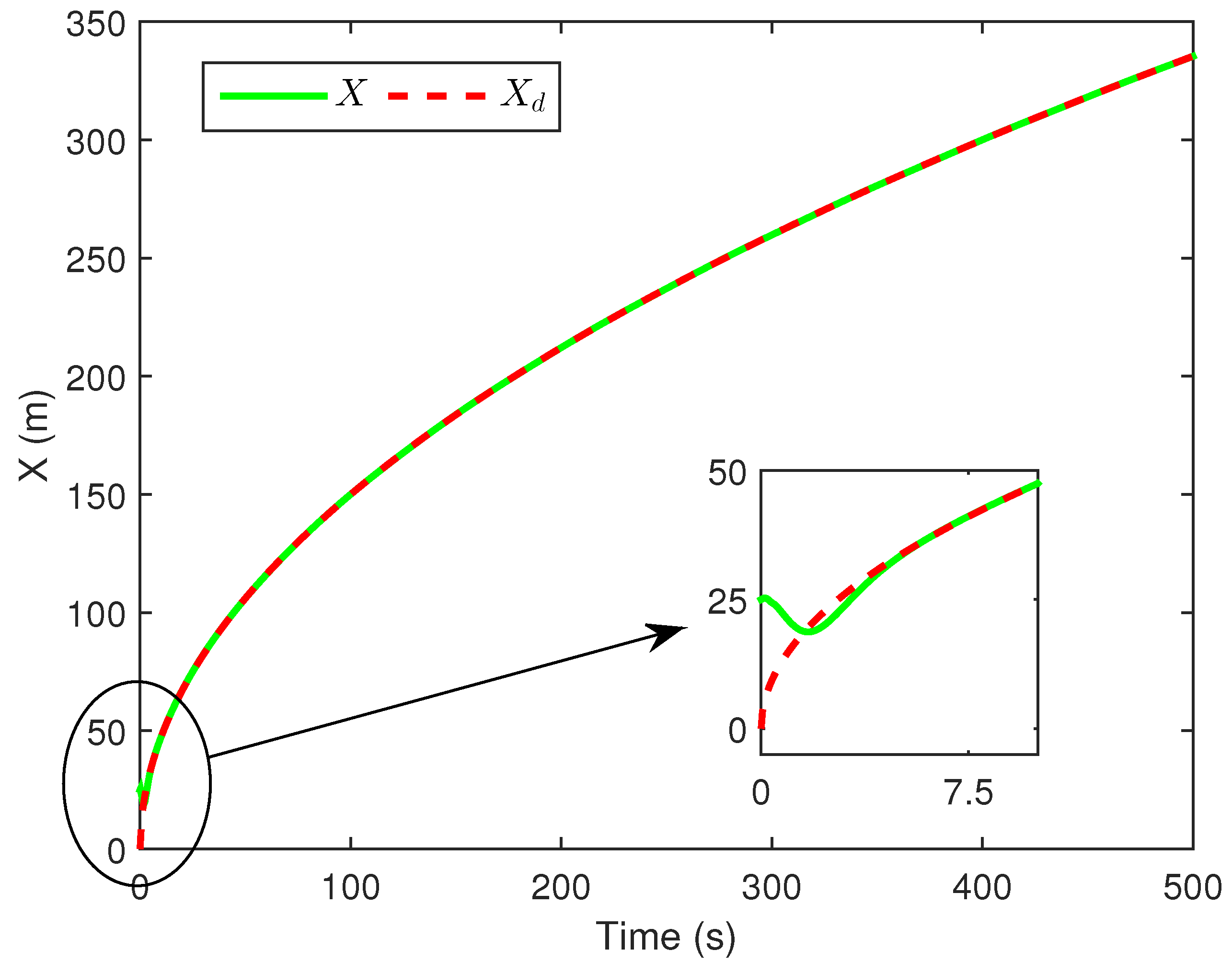
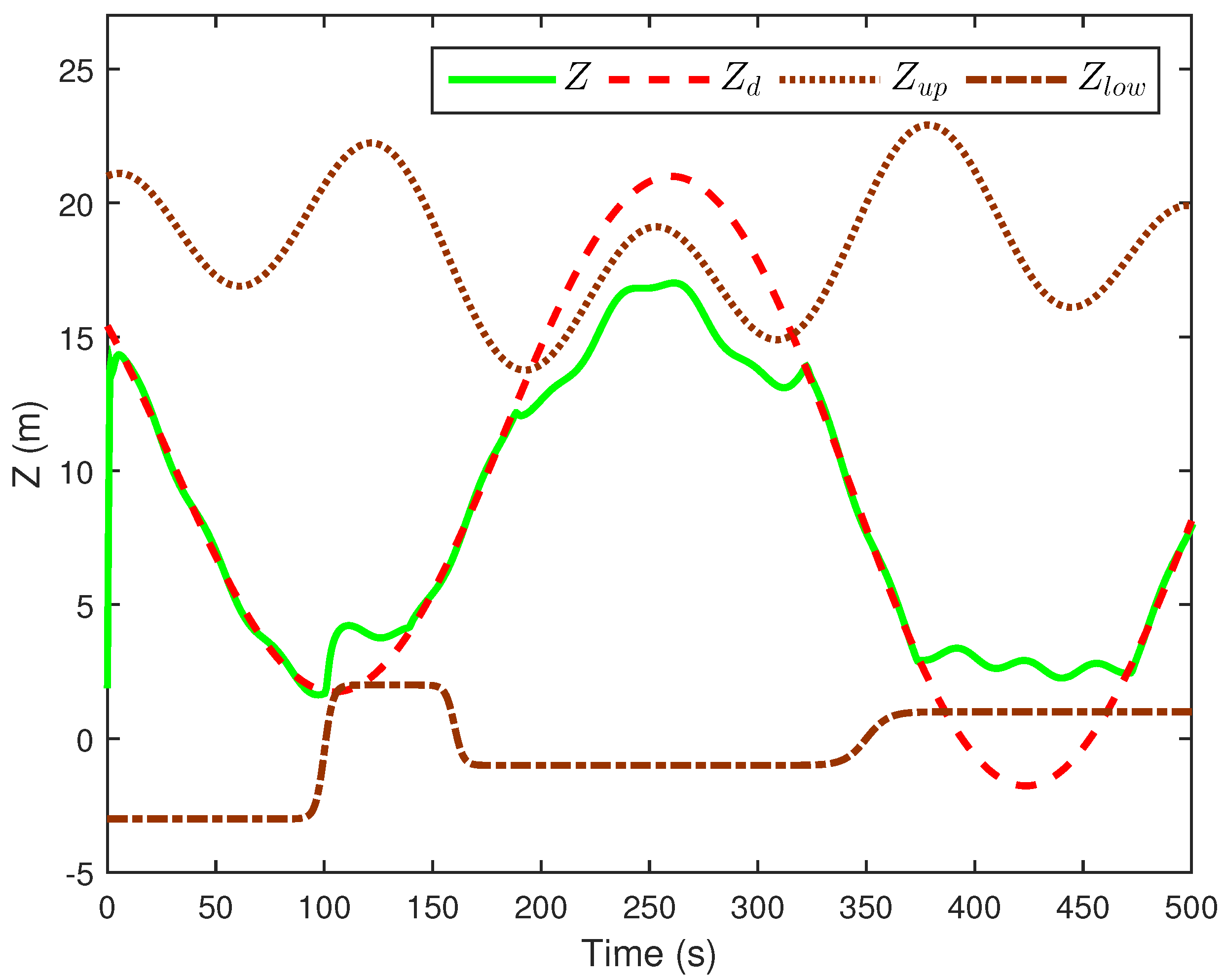
To suppose the flight environment as a pipeline or a cave, we assume that there is no constraint in X-axis, and the safe boundaries of the position in Y- and Z-axis are given by m, m, m, and m.
Without loss of generality, the initial states and desired trajectory are set in
Table 2. The external disturbances are set to the following three matrix forms.
The parameters are chosen as , , , , , , , ,, , , , , , , , , , , . From the conditions above, the simulations are expressed in the following Figures.
Figure 6,
Figure 7 and
Figure 8 express that
P is able to track
on the basis of satisfying the time-varying position boundaries. If the position boundaries conflict with
, the safety of the system has been considered first.
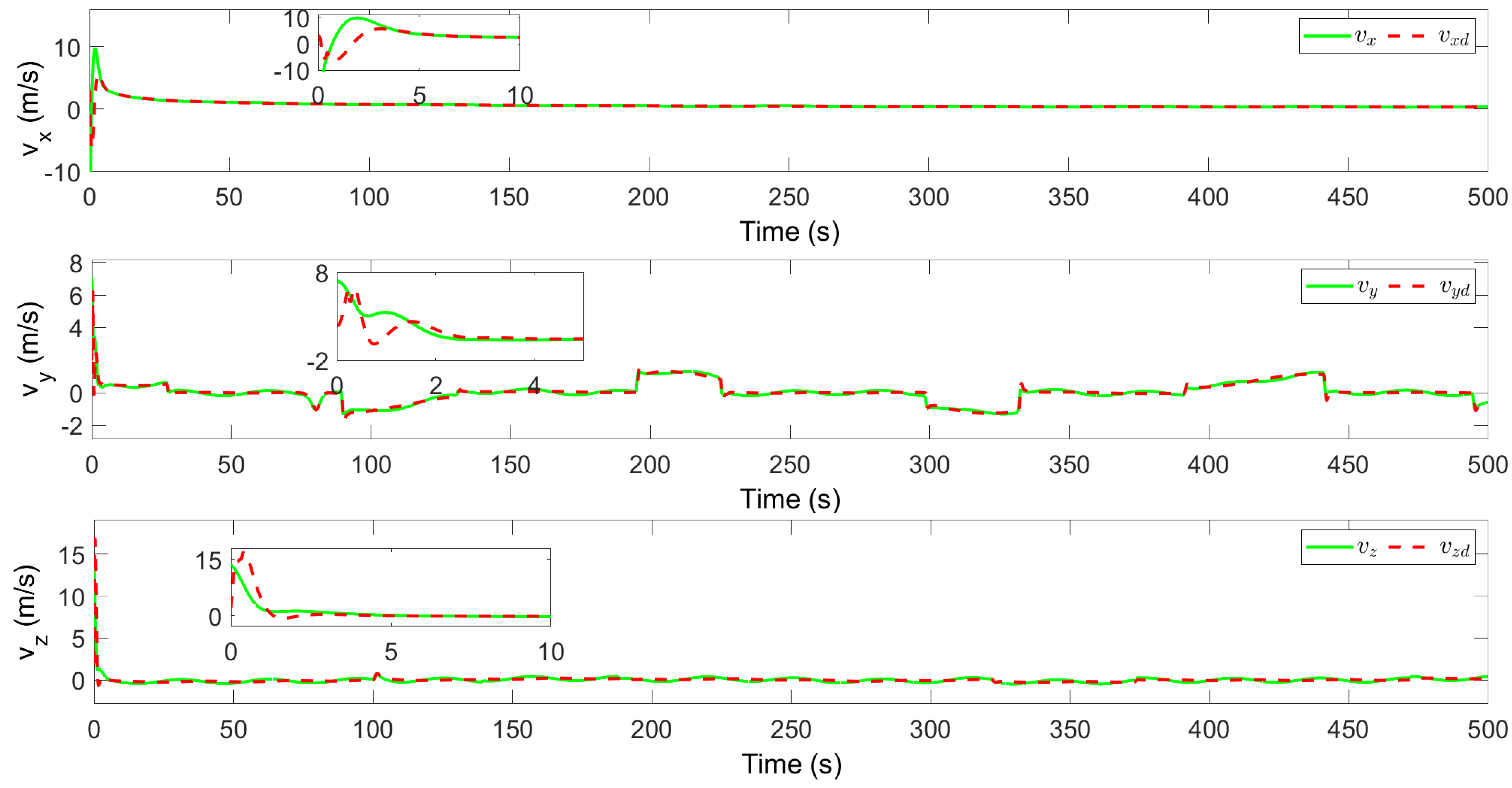
Figure 9,
Figure 10,
Figure 11 and
Figure 12 show the tracking responses of
v,
, and
and
,
,
.
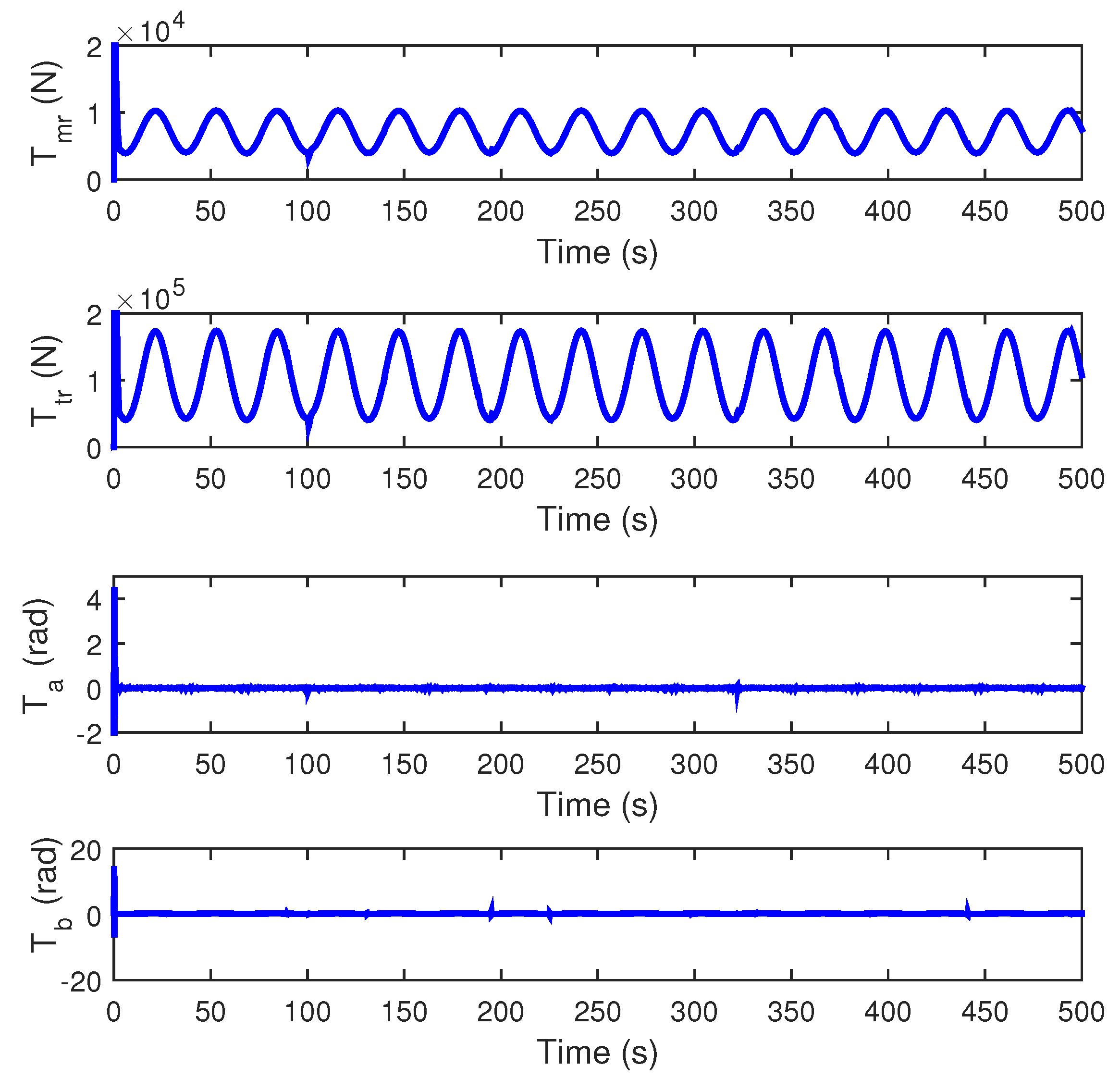
Figure 13 gives the response of the control inputs. As shown in
Figure 9,
Figure 10,
Figure 11,
Figure 12 and
Figure 13, the proposed control scheme is able to guarantee the tracking performance of the UAH system. In addition, it can be observed that even though
and
oscillate a lot at the initial, they can quickly reach stability and meet the actual system requirements.
Figure 14 indicates a satisfying effect of the ESOs in (
36), (
50) and (
60). To analyze the availability of the proposed control scheme,
Figure 15 takes the position state in the
Z-axis of the UAH as an example, which shows four different control schemes under the same condition and parameters. It can be seen that the proposed control scheme satisfies the control objectives as expected in green, while the control scheme without SPA in purple can not satisfy the time-varying path constraints
,
. Moreover, the control schemes without ESO in cyan can not track
accurately owing to the effect of disturbances. Simultaneously, the control scheme in [
35] in yellow can constrain the desired signal within the safe range, and the time–time oscillation is too large, which cannot meet the needs of steady-state accuracy when the UAH is working.
It can be concluded that the simulation results above have classified that the proposed control scheme is available and effective for the UAH under time-varying path constraints and disturbances.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}