A safe and healthy office environment is essential to improve worker productivity [
1,
2]. Sensor technology applications can support workers by measuring and monitoring their work exposures to prevent adverse health effects and increase the quality and comfort of the indoor environment. Pressure sensors are adopted to measure the physical forces exerted by the body. The piezoelectric sensors in semiconductor technology are considered the most popular sensors. However, low manufacturing cost, high flexibility, and the simplicity of the data acquisition circuits are the characteristics for which piezoresistive flexible pressure sensors are widely used. Versatile and flexible pressure transducer and tactile sensors compatible with the skin, which are sufficiently sensitive, are applied in human motion monitoring, health monitoring devices, consumer electronics, and soft robotics [
3]. Experimental studies have demonstrated that it is possible to implement Velostat-based sensors in both static and dynamic flexible systems [
4,
5,
6]. The typical design of a flexible pressure sensor consists of Velostat as a piezoresistive layer and a conductive silver nylon over a neoprene insulation layer [
6,
7,
8,
9,
10]. Pressure-sensitive systems are used to monitor the user’s presence and to obtain information about the user’s health status by detecting possible anatomical abnormalities. In medical diagnosis and sports applications, the body posture control associated with the analysis and measurement of plantar pressure distribution reveals the pressure interface between the plantar surface of the foot and the sole of the shoe. Neonatal constant monitoring, sports training monitoring, and elderly care are applications of the Velostat-based pressure sensitive mat (PSM) [
11,
12,
13]. The plantar pressure distribution allows for the analysis of the rhythm and size of the step, weight distribution between heel and foot, and timing of the gait phases by means of Velostat-based foot sensors installed in the shoe lining [
14]. Moreover, flexible pressure sensors can be designed to identify the main characteristics of the human body mass distribution [
15]. Prolonged sitting, especially with bad posture, can lead to a stiff neck, tight shoulders, and back pain. In light of this problem, the Velostat pressure sensors can be chosen in the acquisition system to monitor the driver’s posture and the intensity of prolonged sitting or reclining activity [
16]. The ergonomic and performant smart cushion, based on a pressure-sensor array using the piezoresistive material Velostat as the core, is designed for sedentary people to correct their sitting posture and for drivers to improve their driving safety [
17]. In fact, different human behaviors can produce different sitting postures, resulting in different pressure distributions on a seat. Unlike stand-alone pressure sensors, the pressure-sensor array can be distributed over the entire seat to gather comprehensive information about the pressure distribution of the human body. To identify incorrect sitting posture, a smart mat is embedded with pressure-sensing elements made by a low-cost E-Textile arranged in a matrix form [
18]. Pressure distribution sensors located on the surface of the seat and backrest of the chair enable real-time acquisition of contact information between the chair and the occupant. Studies on standing posture and stability use, as a quantitative measure, the displacement of the center of pressure (CoP) calculated through a force platform in aged or diabetic subjects, children with cerebral palsy, or subjects in the neonatal stage. Pressure-sensitive mats (PSMs) are generally adopted to measure pressure on seats, beds, or floors, for interactive multimedia systems, for interactive toys, and for measuring CoP and train sitting balance [
11,
19]. Elderly or long-term hospitalized patients with diseases have a significant risk of pressure sores, which are wounds of the skin and internal tissues caused by continuous pressure on a specific area of the body. Sleep posture monitoring can prevent events such as sleep apnea or pressure ulcers that can generate pain, infection, and even death and, thus, negatively impact patient health and public health costs [
7]. For this reason, several studies have been conducted on a bed pressure monitoring system suitable for daily use to prevent pressure ulcers, proposing complex solutions. Various types of pressure sensors, accelerometers, and gyroscope sensors have been used for sleep pattern and posture recognition [
20]. The smart mat system, based on a dense flexible sensor array and printed electrodes for sleep posture recognition and sleep activity monitoring, is presented in [
20]. Force-sensing resistors are incorporated into the mat to capture the pressure distribution of the human body, and machine learning methods including pre-processing and deep residual networks are applied to classify sleep postures [
7]. The IoT-based smart bed systems are designed to support care assistants for elderly patients and patients with limited mobility. The use of the Internet of Things (IoT) and artificial intelligence in modern healthcare has promising technological, economic, and social implications [
21]. All health information can be collected, managed, and used more efficiently due to the global connectivity of IoT. Wearable health management systems offer low-cost solutions for non-invasive personal health monitoring, enabling early diagnosis and better treatment for various medical conditions. The advanced intelligent IoT proposes the innovative textile pressure Velostat sensors to observe twenty-one people in four lying positions for preventing fall accidents and bedsores through the message queuing telemetry transport (MQTT) protocol and Arduino-based hardware [
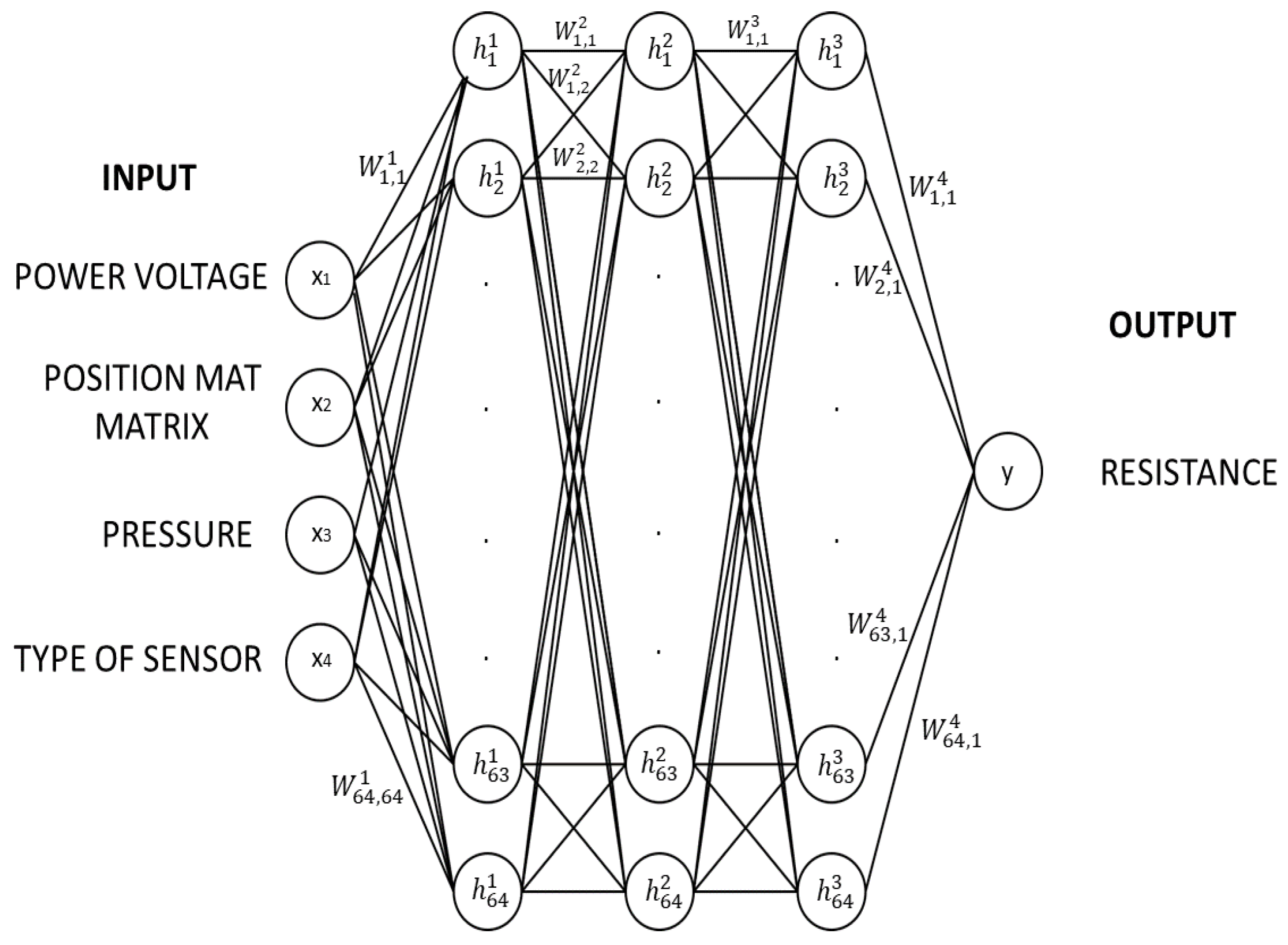
22]. Additionally, an intelligent Velostat mat for monitoring body position by obtaining pressure distribution on the patient’s body and posture prediction by ANN for medical applications is presented in [
23]. A low-cost pressure sensor array consisting of conductive fabric and wires has been designed for sleep posture recognition by a shallow convolutional neural network (CNN) or by multiple accelerometers. The current paper presents the characterization of a sensitive mat based on Velostat and a control system adopted as the target solution to improve medical diagnosis.
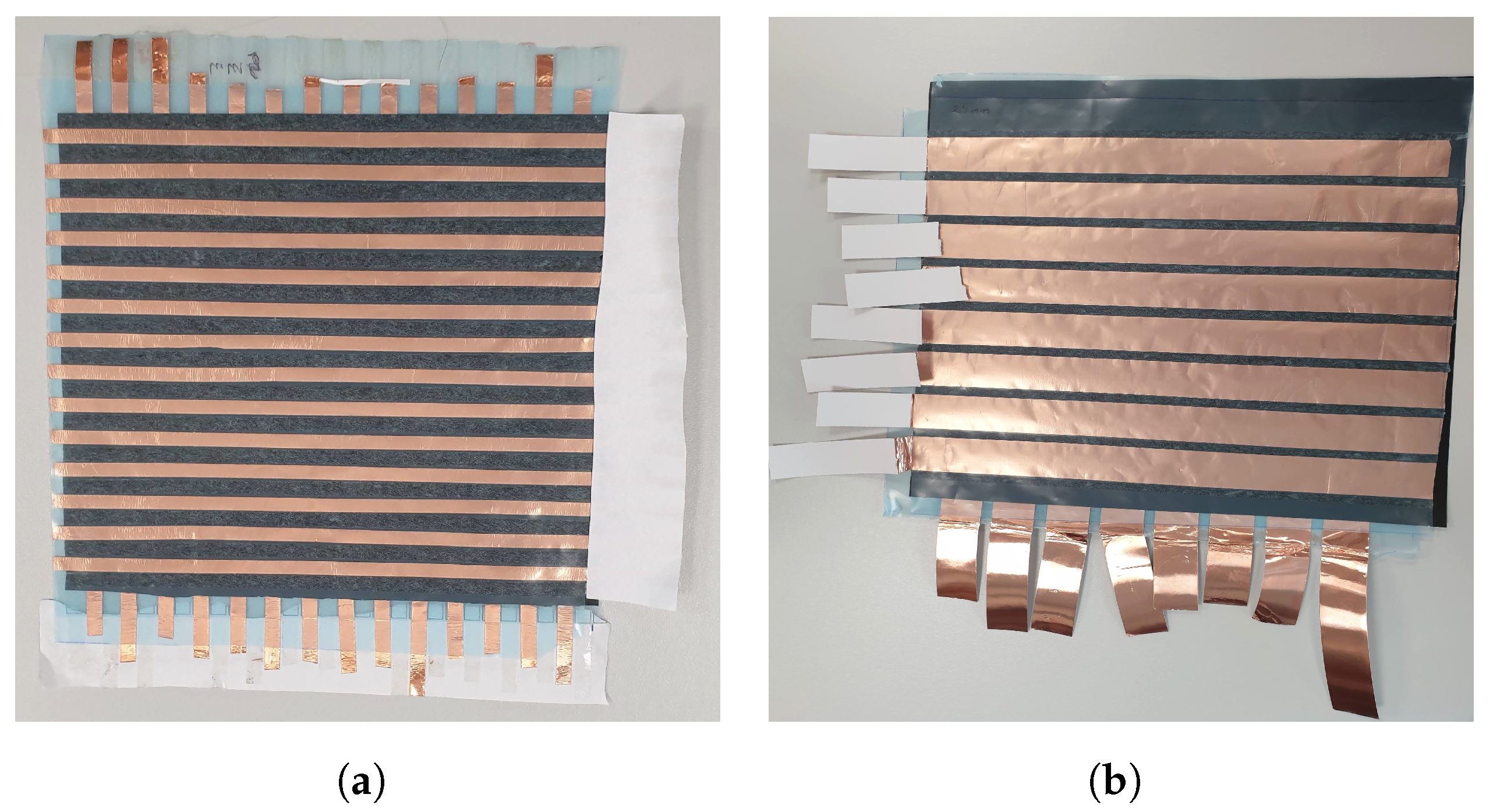
Figure 1.
(a) Prototype Velostat pressure sensing mat n.1 with a sensitive cell size of 5 × 5 mm, (b) Prototype Velostat pressure sensing mat n.2 with a sensitive cell size of 25 × 25 mm.
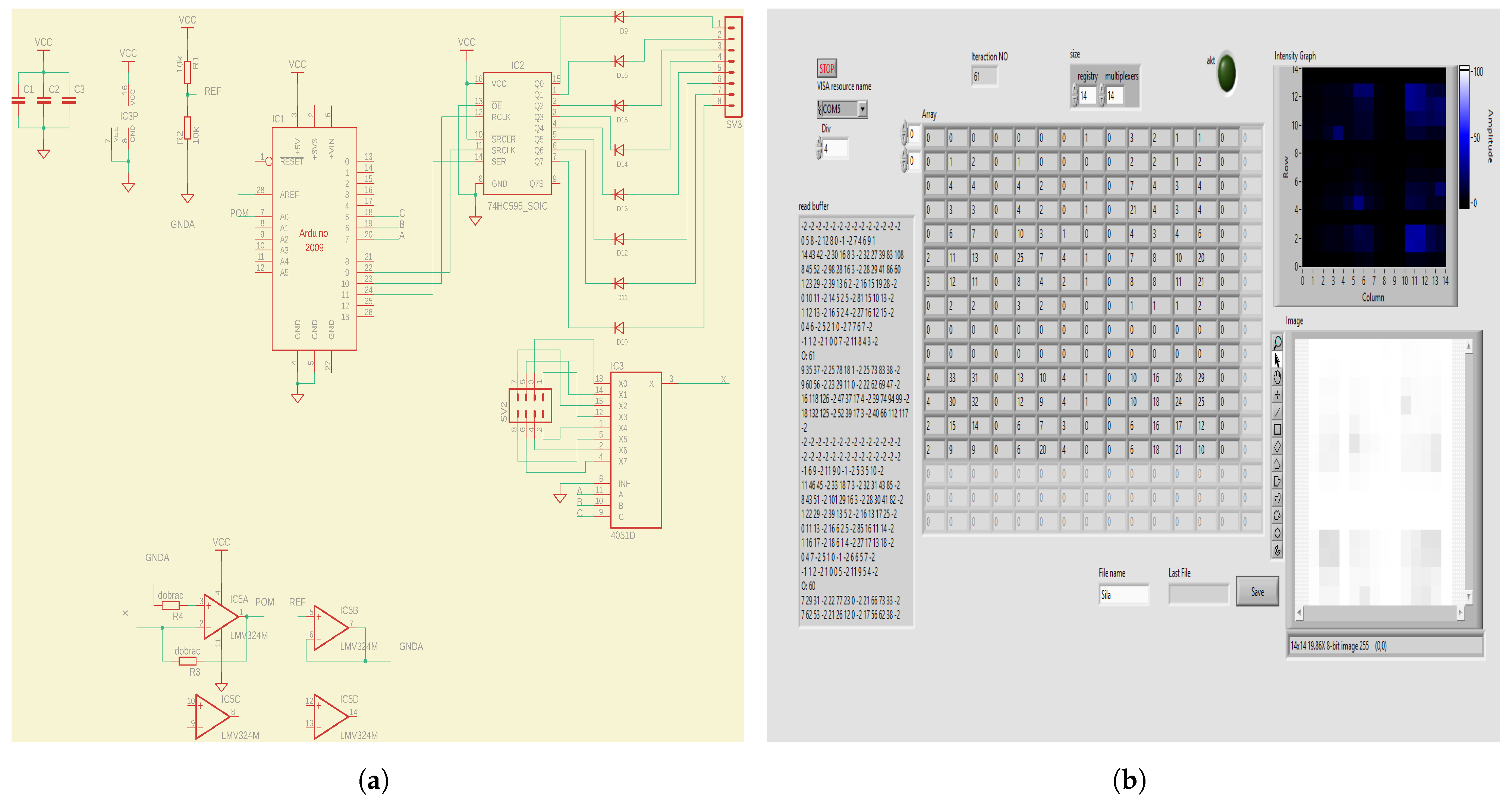
The novelty of this method involves an intelligent system completed by a measurement system, a micro-controller, and peripherals, including an innovative algorithm for the description of the characteristics of the 2D pressure-sensing matrix based on commercial materials that can be integrated in real-life conditions, i.e., installed onto a patient’s bed. Additionally, a neural network for assisting in positional detection of applied pressure was developed in that system. The smart mats can be integrated with innovative technology and materials in order to improve the design process and user comfort while providing health benefits such as sleep monitoring functionality, sleep quality and anti-snoring, detecting human postures, and counting posture cycles. A variety of different data such as heart rate, respiration, sleep quality, and blood pressure can be provided by smart mat sensors able to analyze the psycho-physical factors related to sleep in a non-invasive way. The analysis of the electrical performance of the mat using new techniques can help manufacturers to create higher quality and efficient products, to monitor sleep and rest patterns, and to optimize sleep activity connecting with smart devices, Wi-Fi, and IoT. The pressure-sensitive mats based on Velostat and the embedded Arduino system were manufactured and developed in the Laboratory of the Department of Mechatronics, Silesian University of Technology, Gliwice, Poland. In
Section 2, the Velostat material is analyzed and in
Section 3 are presented the different measurements tests, including the data visualization through Arduino conducted in laboratory on the sensor mat. Based on the experimental results obtained in laboratory, the methodology of the neural network algorithm and the results are described in
Section 4 and
Section 5, respectively. The conclusions are drawn in
Section 6.

 ,
, 










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}