Development of a Gyrokinetic Particle-in-Cell Code for Whole-Volume Modeling of Stellarators

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Brief Description of the Gyrokinetic Particle-in-Cell Simulation Code, XGC
2.1. Basic Equations
2.2. Spatial Discretization of Electromagnetic Field
2.3. Particle-Mesh Interpolation
2.4. Comparison with Fully Kinetic Particle-in-Cell Scheme
3. Equilibrium Magnetic Field and Triangular Mesh for the Core Region
3.1. Interface to Three-Dimensional VMEC Equilibrium Data
3.2. Field-Aligned Triangular Mesh Generation
4. Extended Magnetic Equilibrium and Unstructured Mesh Generation in the Edge Region
5. Verification Tests for the Implemented Schemes
5.1. Particle Tracing in the Extended VMEC Equilibrium
5.2. Particle-Mesh Interpolation in Field-Aligned Mesh
5.3. Field Calculation on Non-Axisymmetric Triangular Mesh
5.4. Benchmark Test on Collisionless Damping of Electric Field Perturbation in LHD
6. Conclusions and Discussions
- The magnetic field profiles in the core region are defined by three-dimensional VMEC equilibrium data. The equilibrium data are discretized in the cylindrical coordinate. Three-dimensional spline interpolation is used to obtain magnetic field values at an arbitrary position.
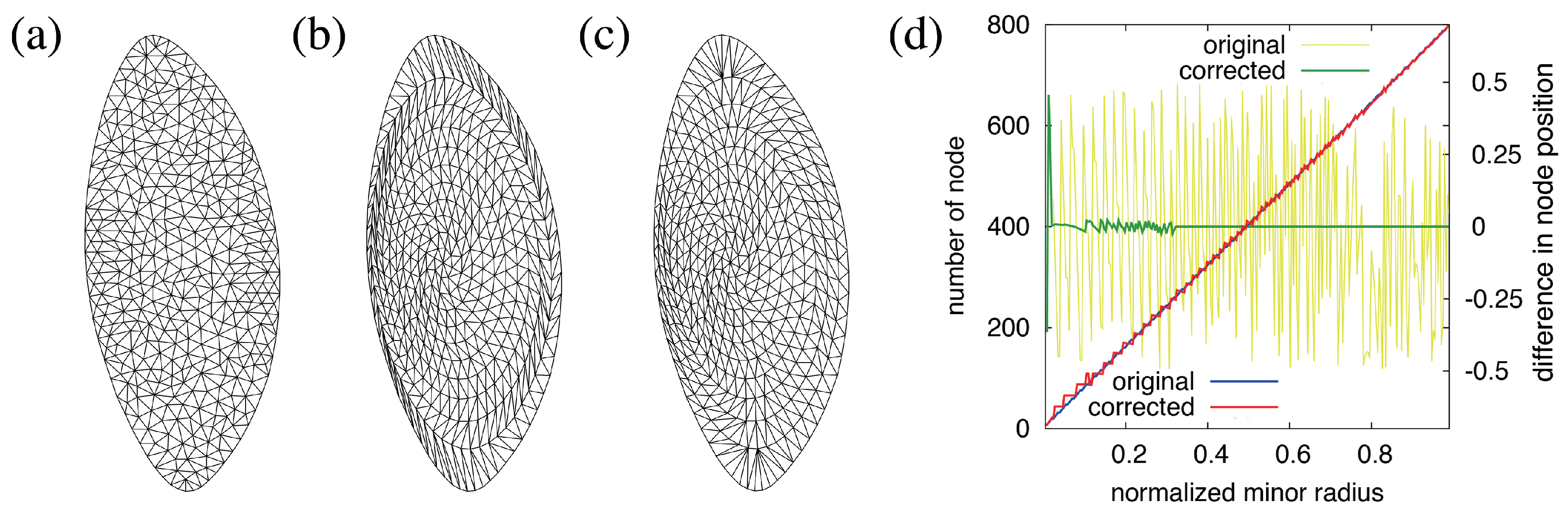
- Non-axisymmetric triangular meshes are generated in the flux coordinate so as to include flux surface structures and follow field lines. Triangular unstructured meshes are employed to define perturbed values such as electrostatic field, charge density, and other plasma fluid moments on planes of constant toroidal angle. The field-aligned mesh is useful to reduce numerical dissipation in particle-mesh interpolation and to enhance numerical efficiency in the field solve.
- The VMEC equilibria are smoothly extended to the edge region of LHD using a virtual casing method. The edge magnetic field is estimated from the surface current of the core region as well as the external coils. The magnetic field in the core region is identical to the VMEC equilibrium, and therefore compatible to the triangular mesh in the core region.
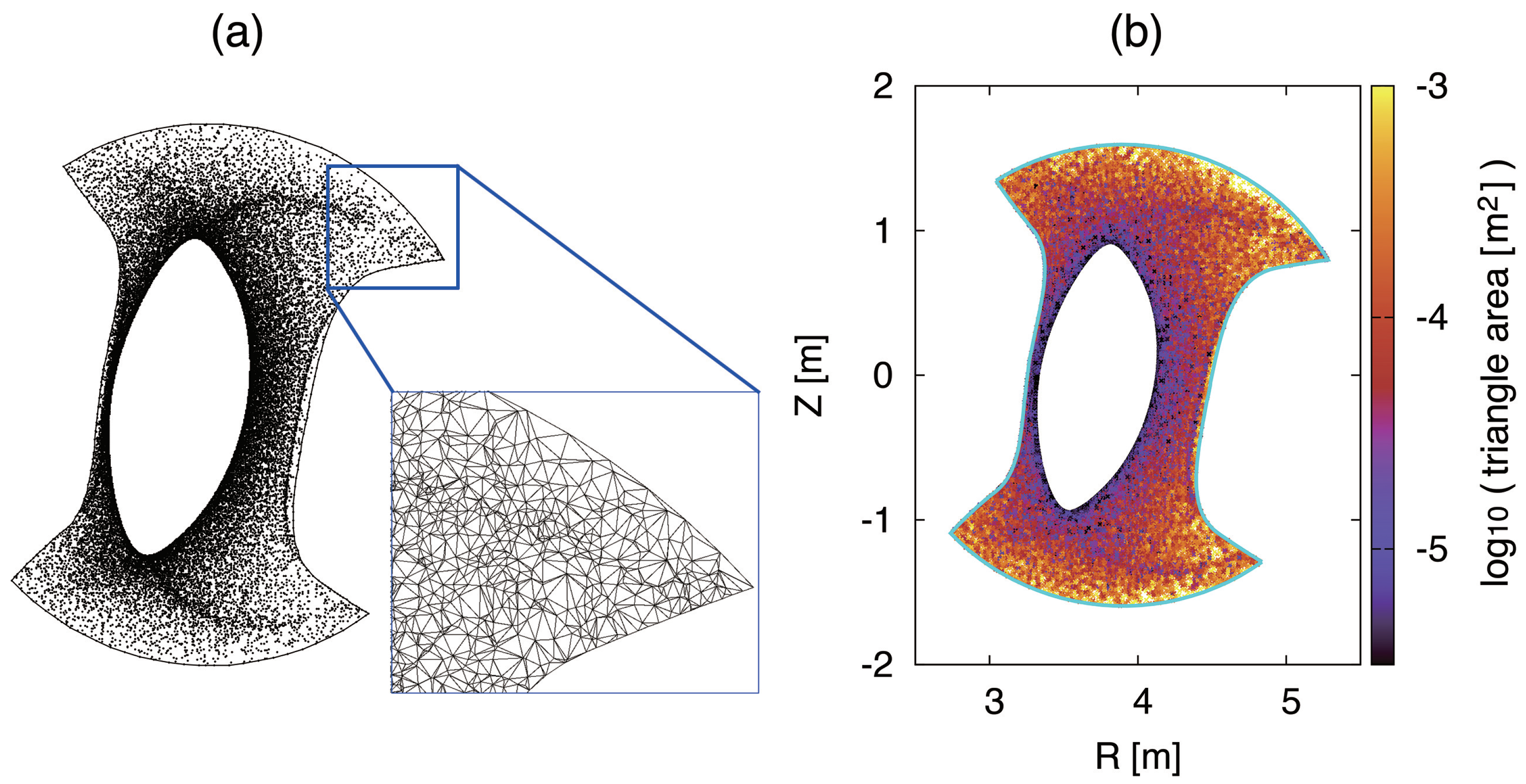
- Field-aligned triangular mesh in the edge region is generated by numerical field line tracing in the extended equilibrium. The generated mesh is automatically refined in the stochastic region and divertor legs. The mesh can relate plasma dynamics to global field line structure through the particle-mesh interpolation.
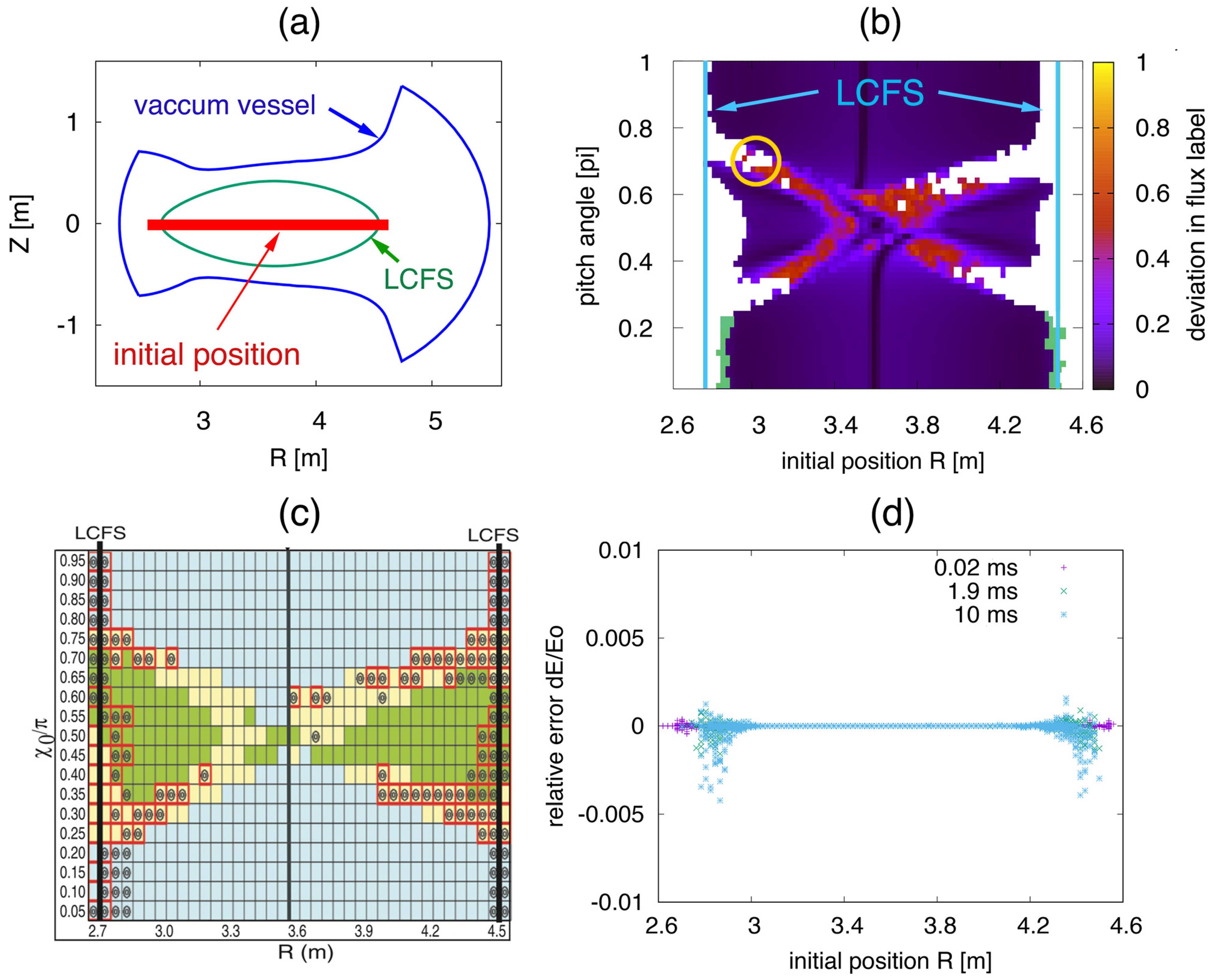
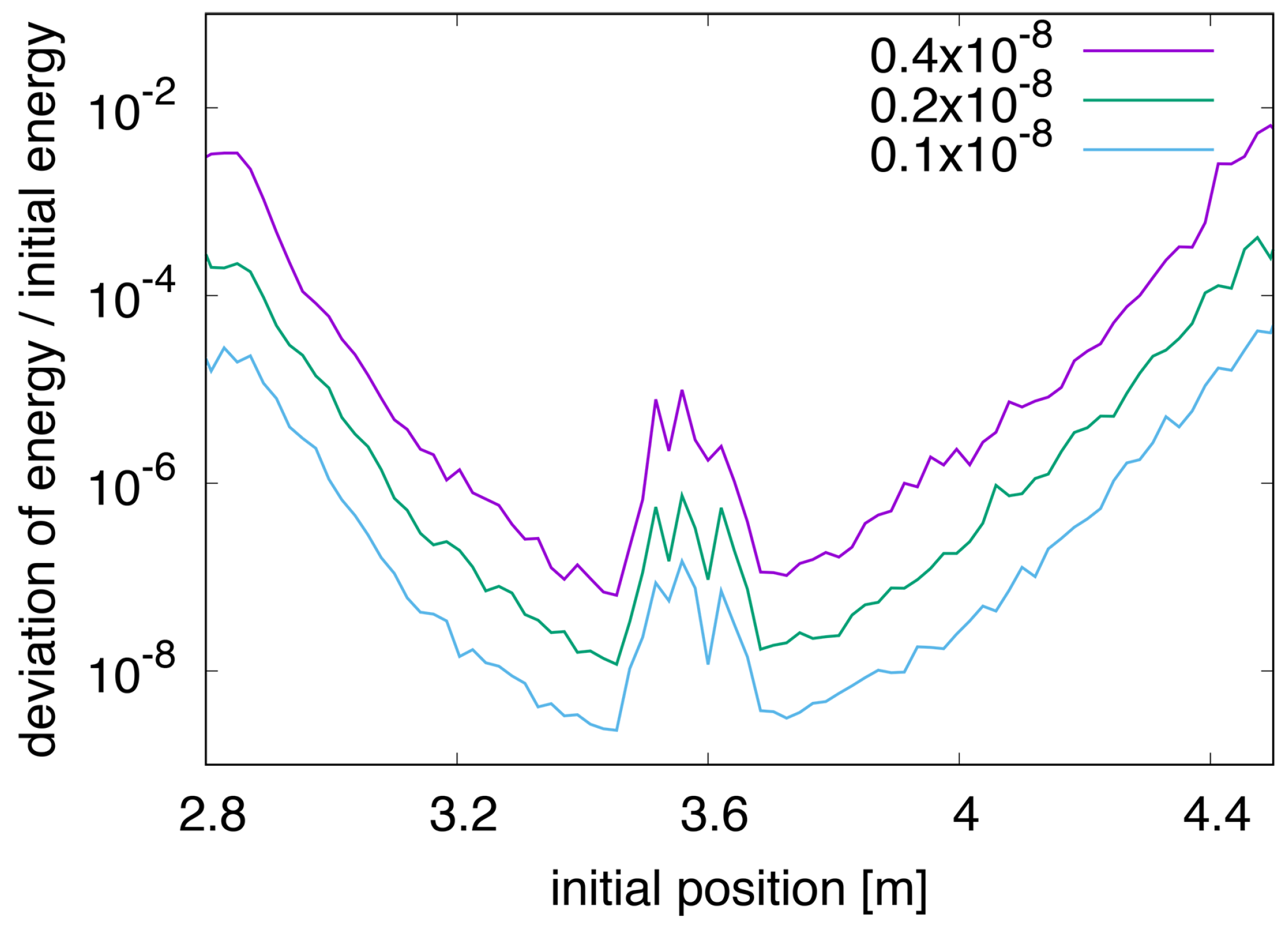
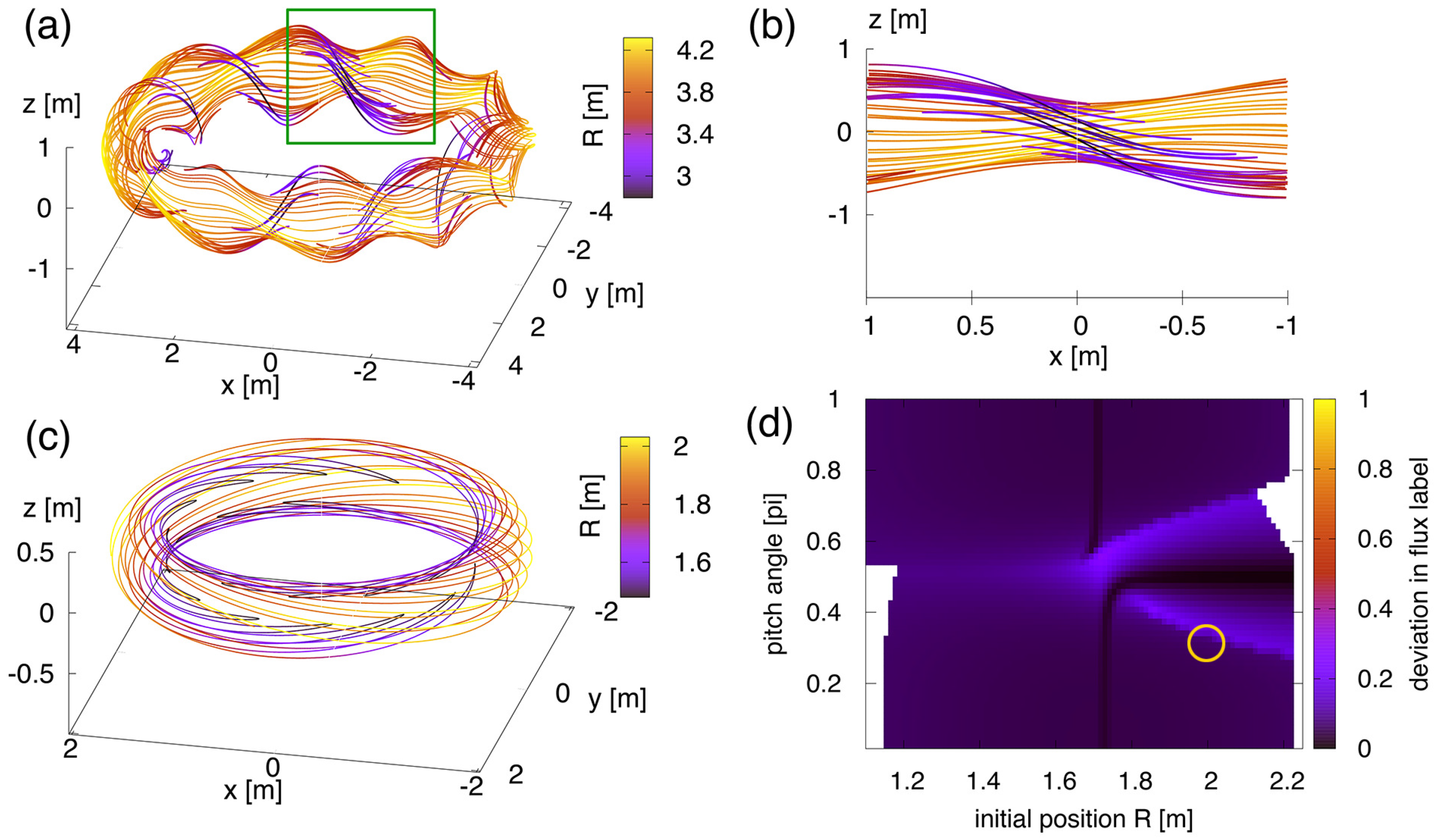
- For the “push” step, particle orbits are calculated in the extended VMEC equilibrium. The relationship between particle loss at the vessel boundary and initial condition (position and pitch angle) is in good agreement with a previous simulation study using a HINT equilibrium. This agreement indicates that the “push” process using three-dimensional spline interpolation can trace particle orbits accurately in the extended VMEC equilibrium.
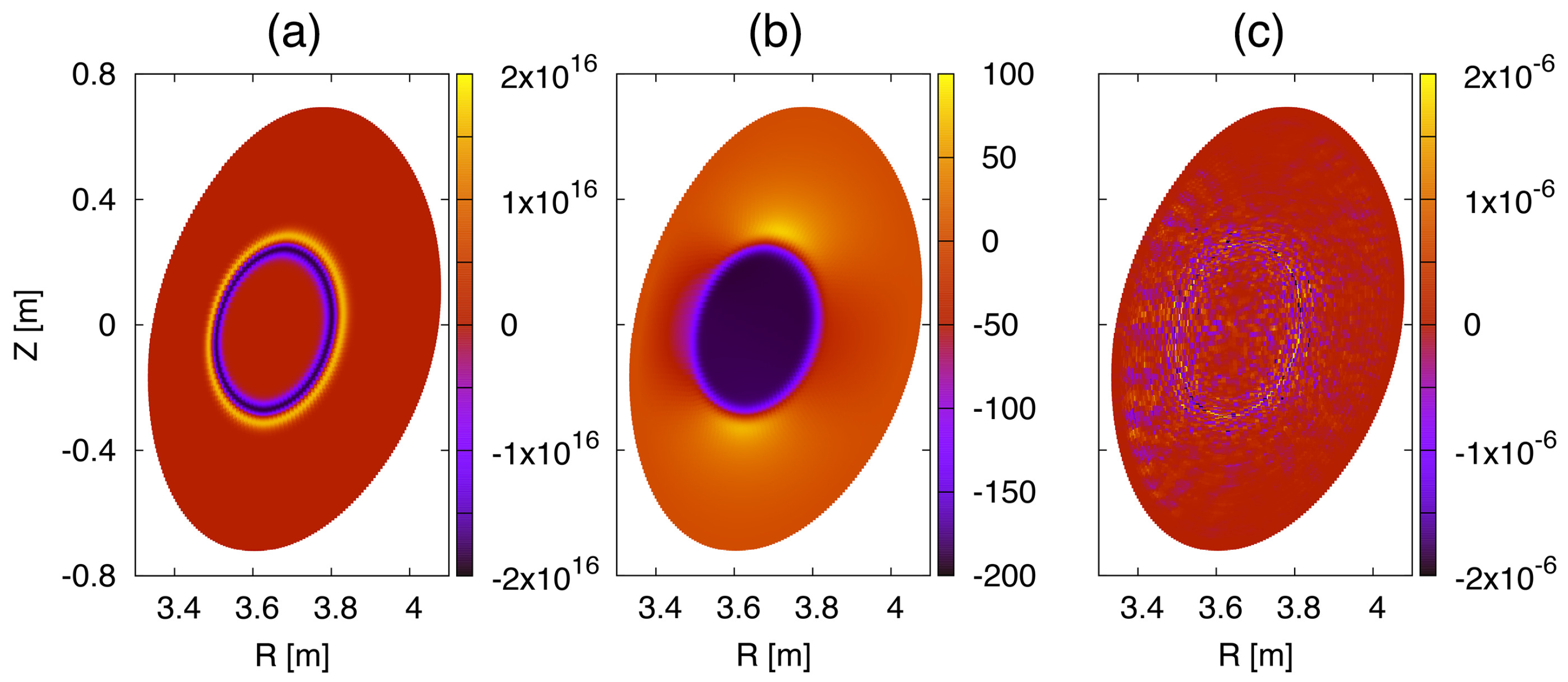
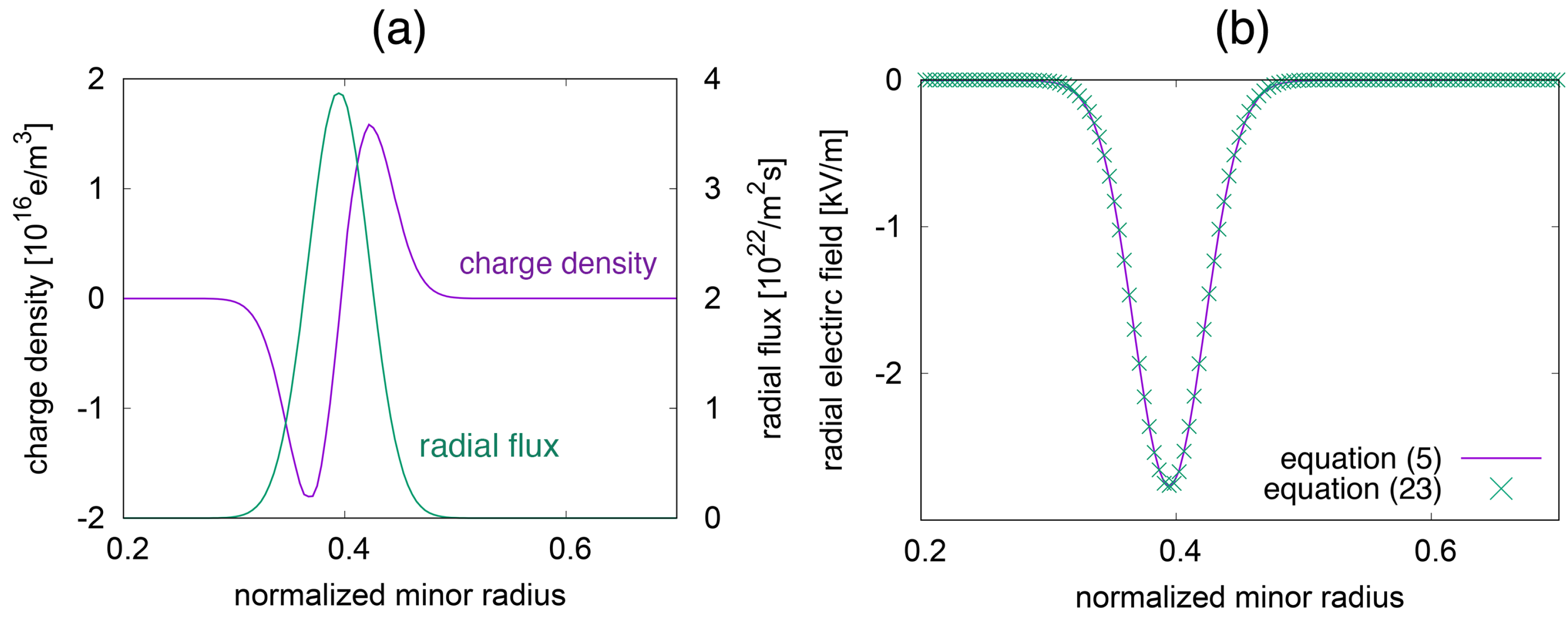
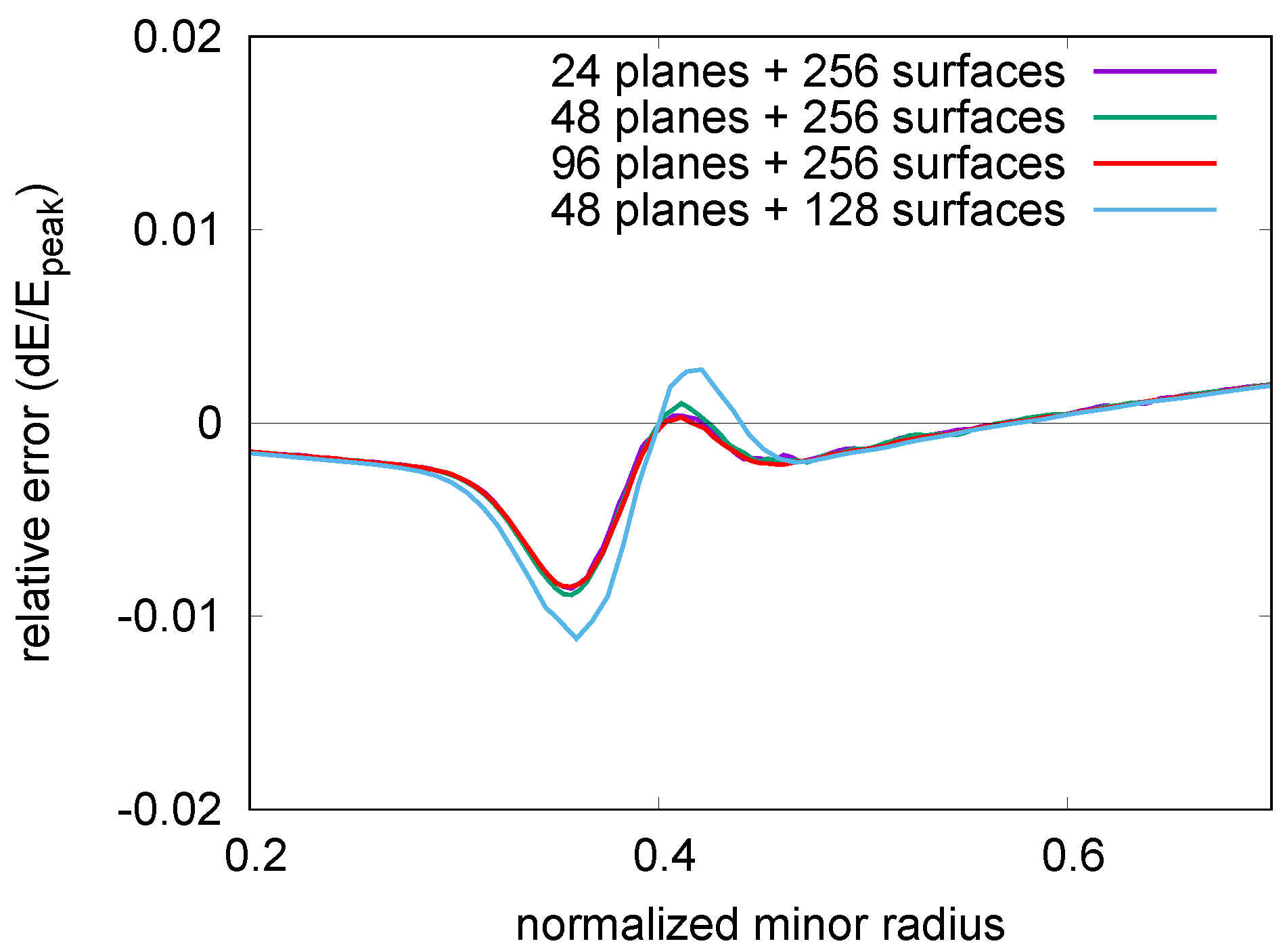
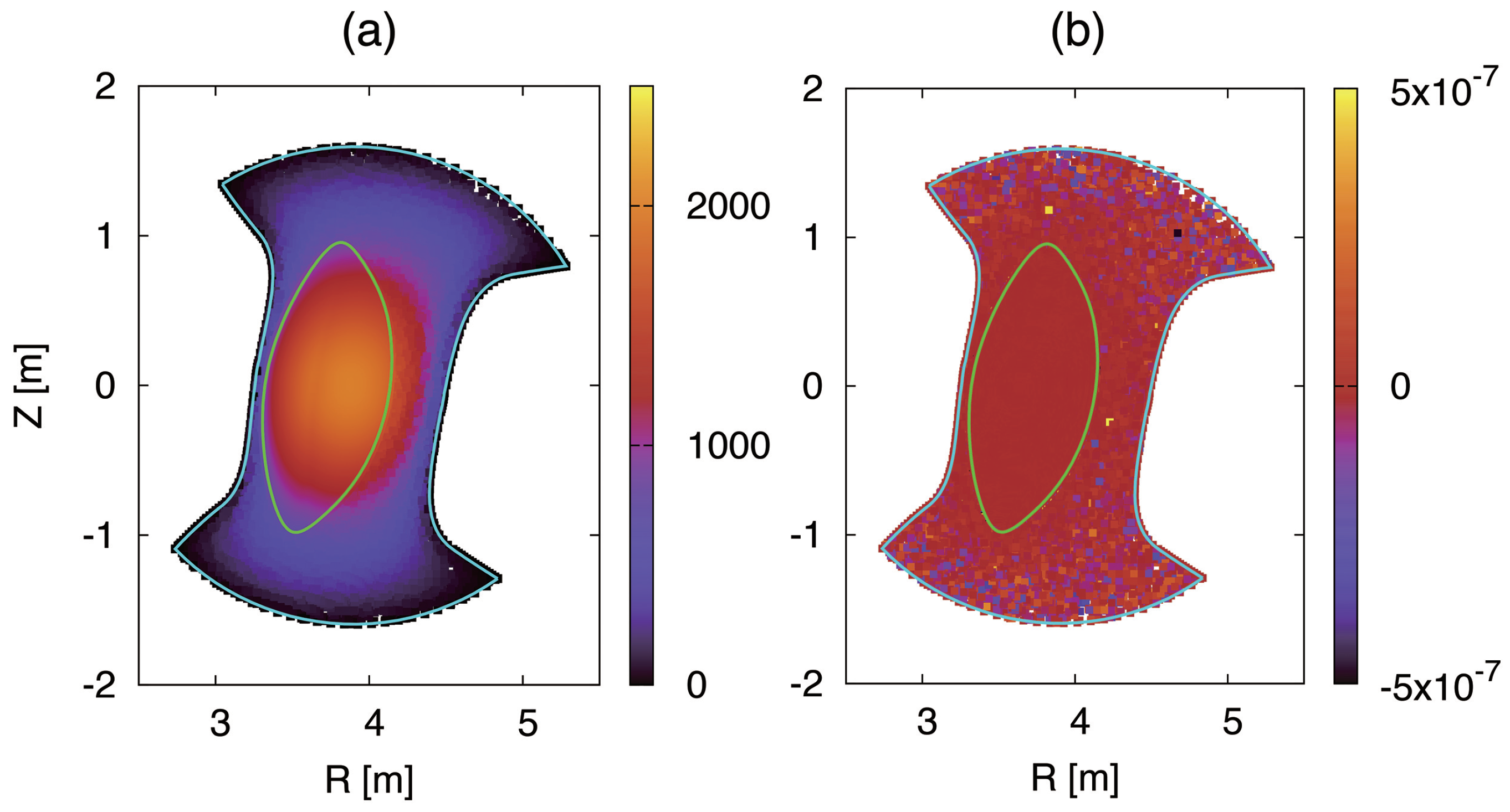
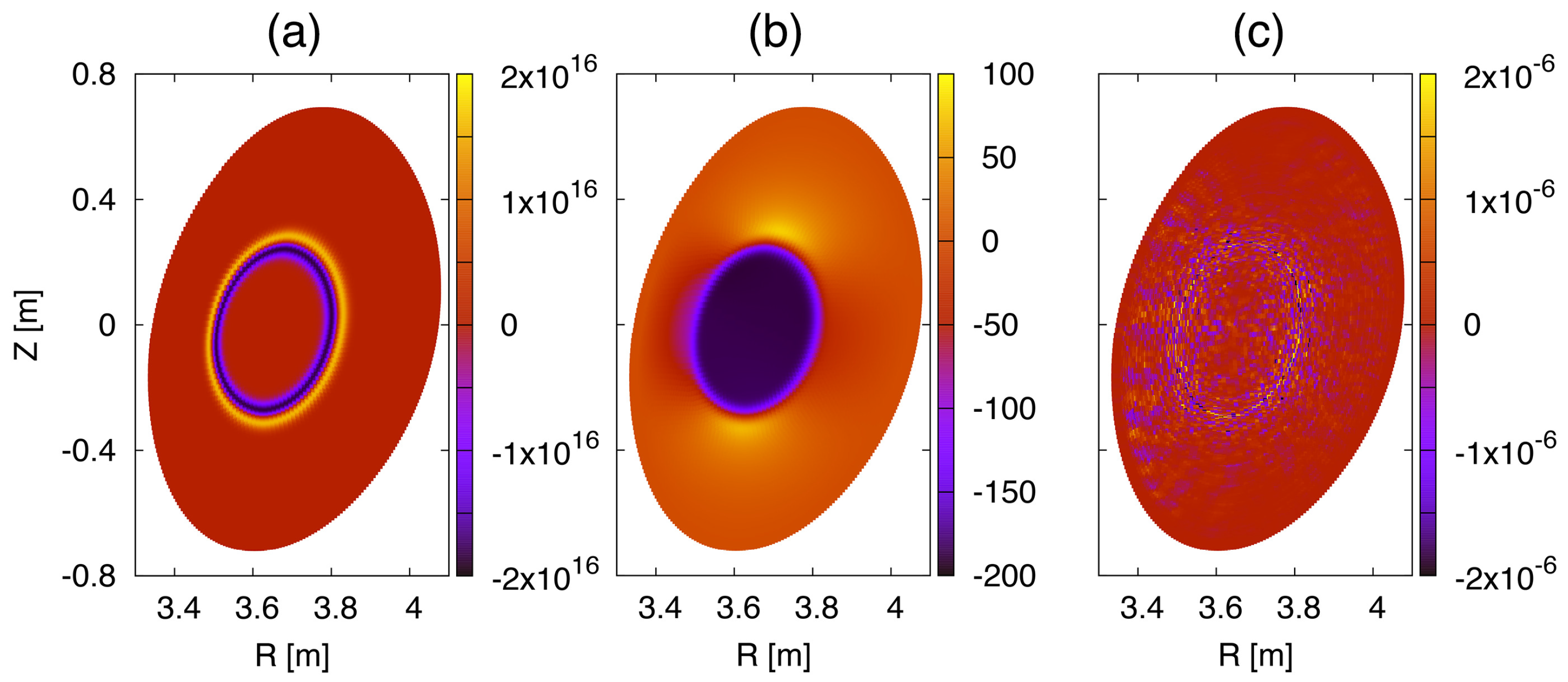
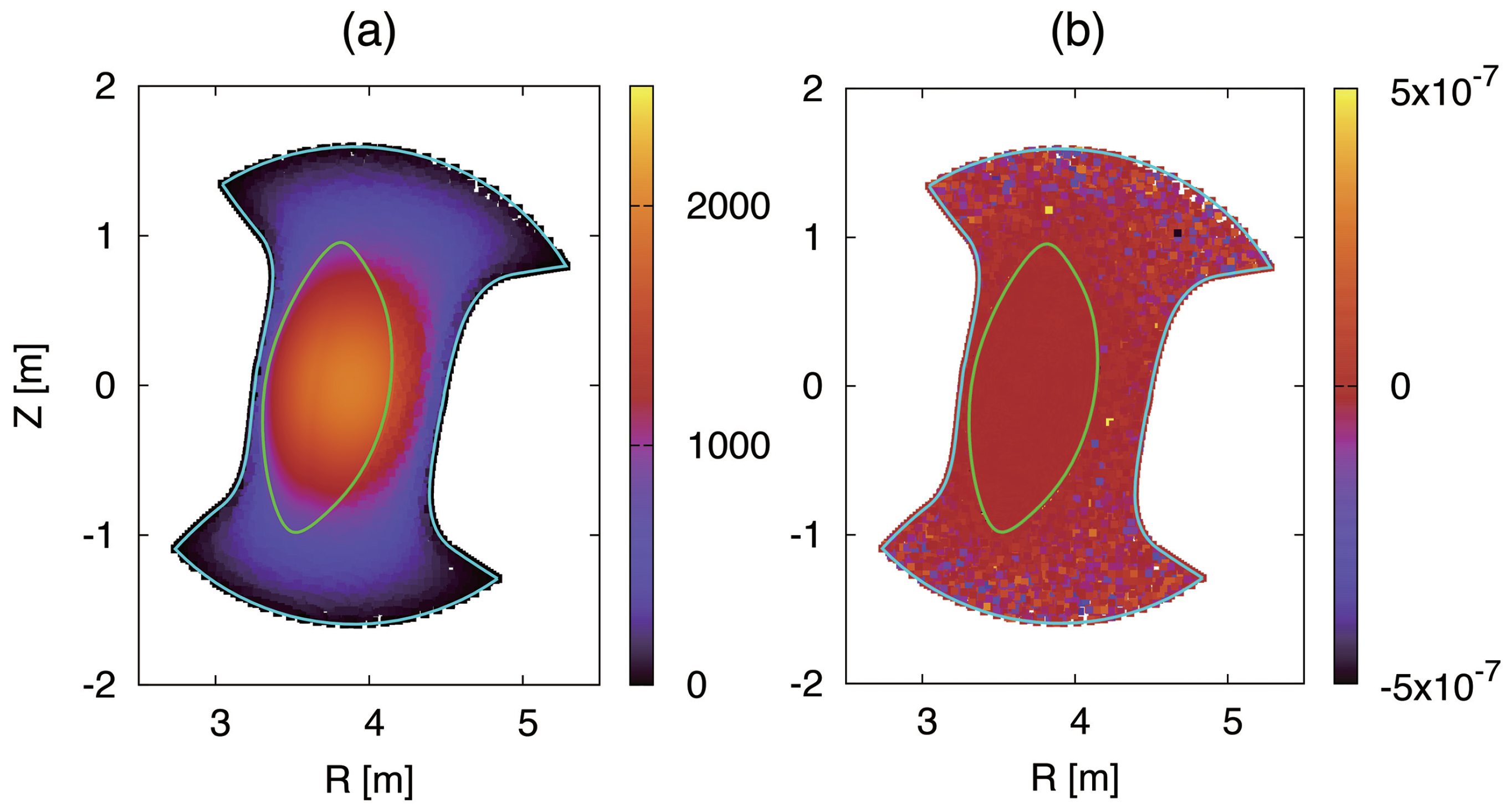
- For the “field” step, the finite-element Poisson solver is applied to a model charge density profile on the triangular mesh. We confirm that the Poisson solver converges within a small residual level. The flux-surface averaged electrostatic potential evaluated from the alternative equation (radial Ampere’s law) is almost indistinguishable from that obtained from the finite-element gyrokinetic Poission equation. The finite element Poisson solver also converges on the unified triangular mesh including the core and the edge regions to obtain a smooth solution independently of the interface of the two meshes at the last closed flux surface.
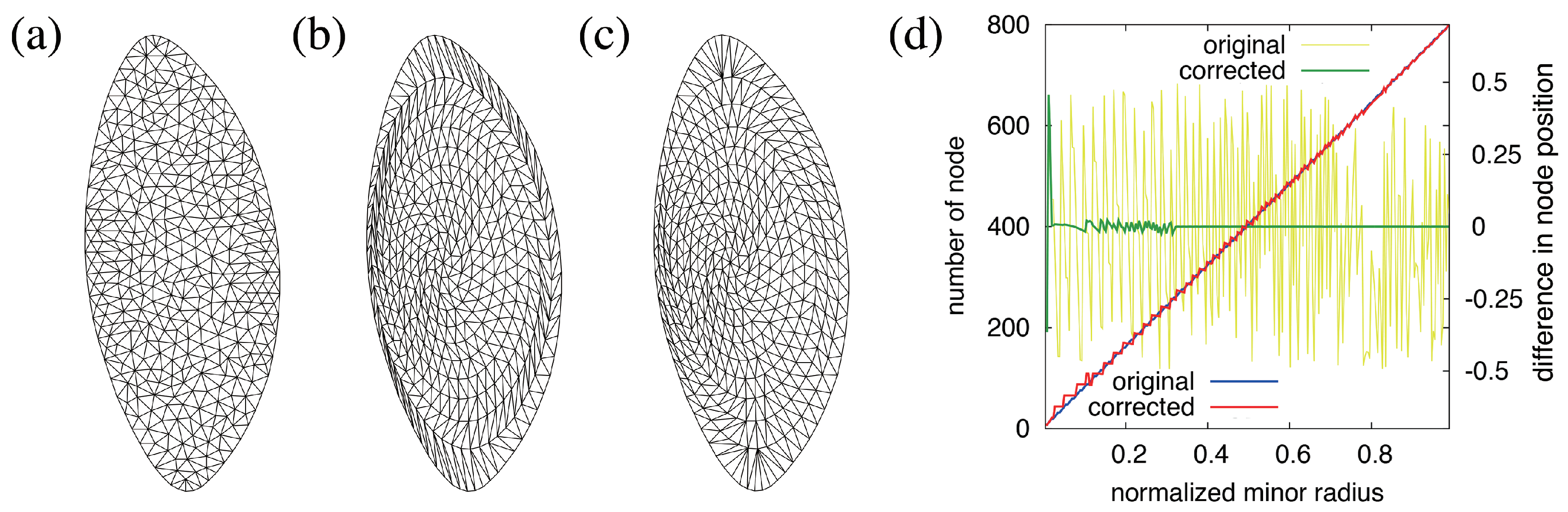
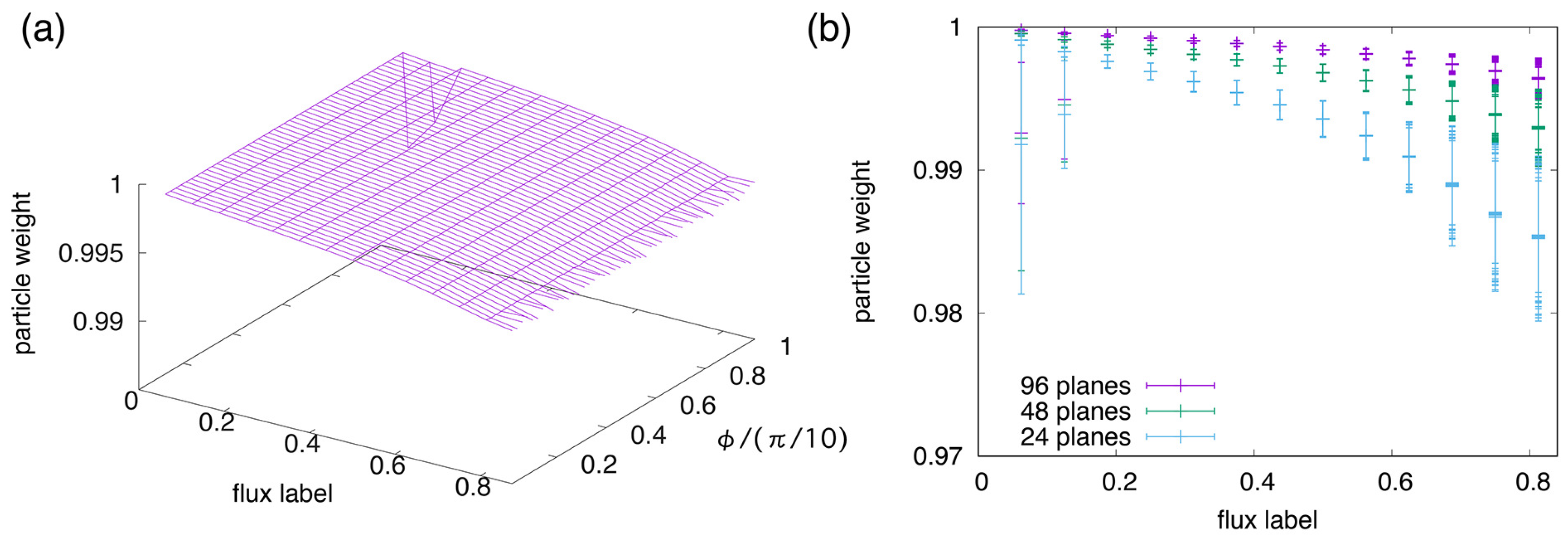
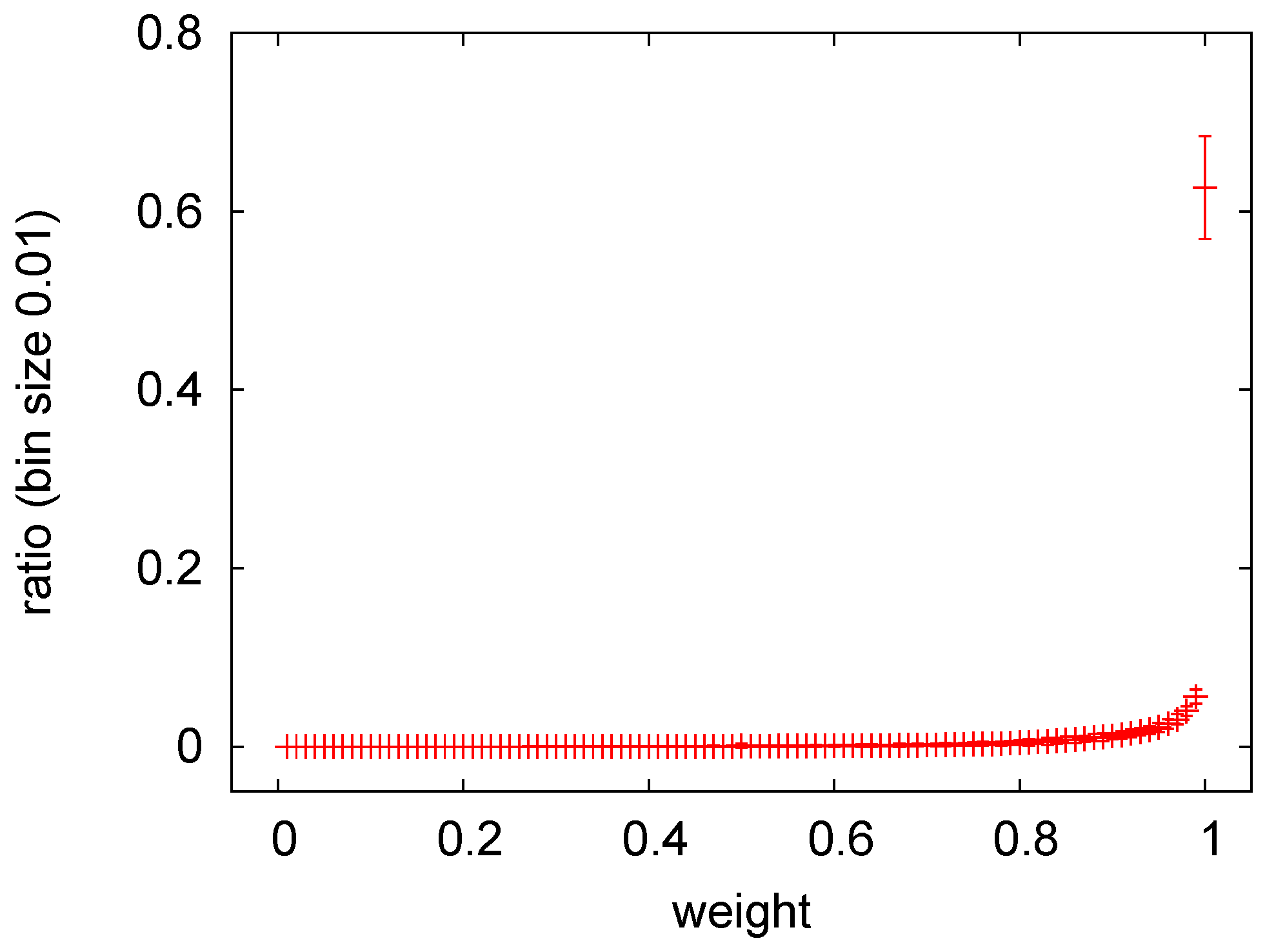
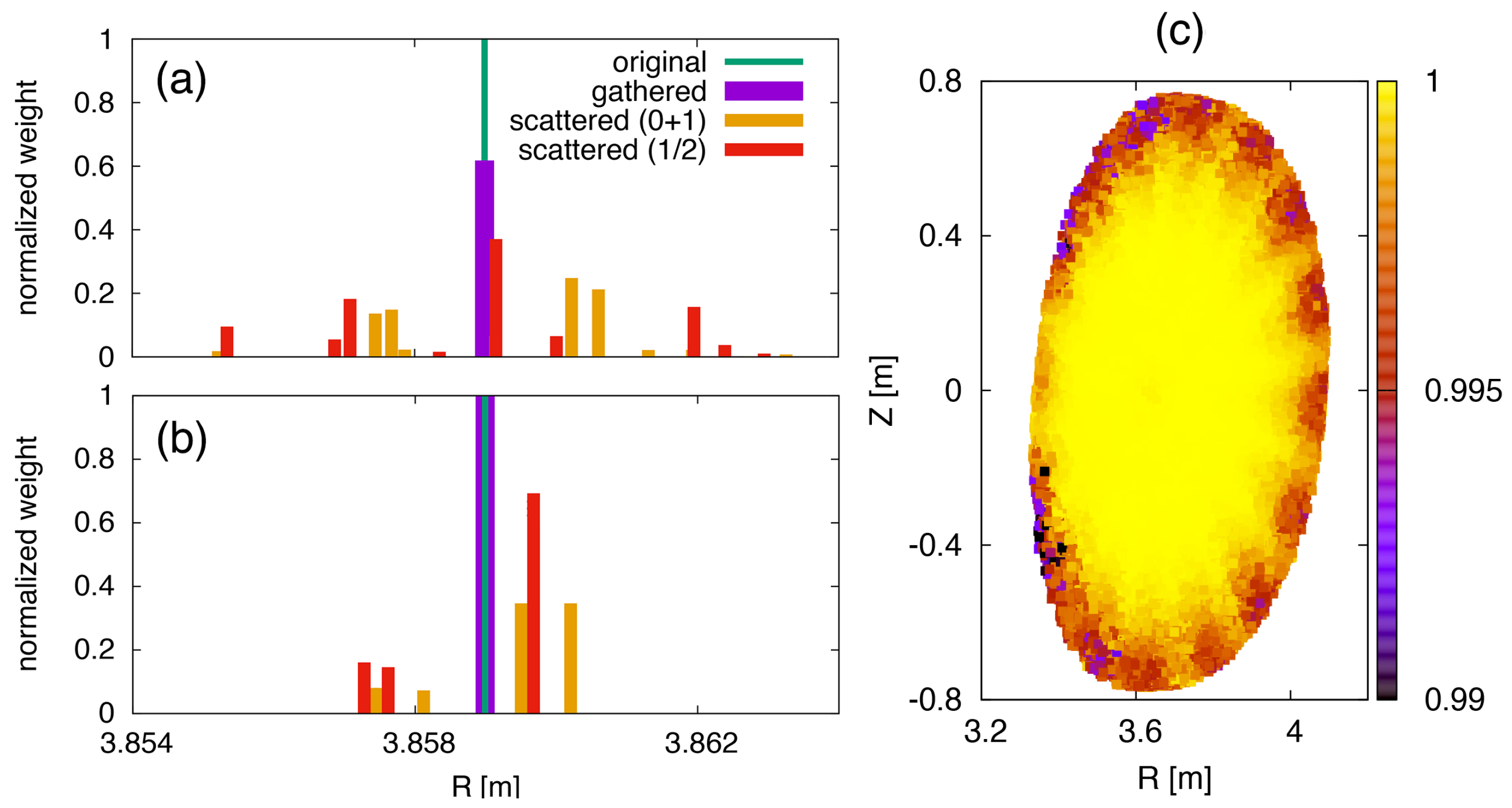
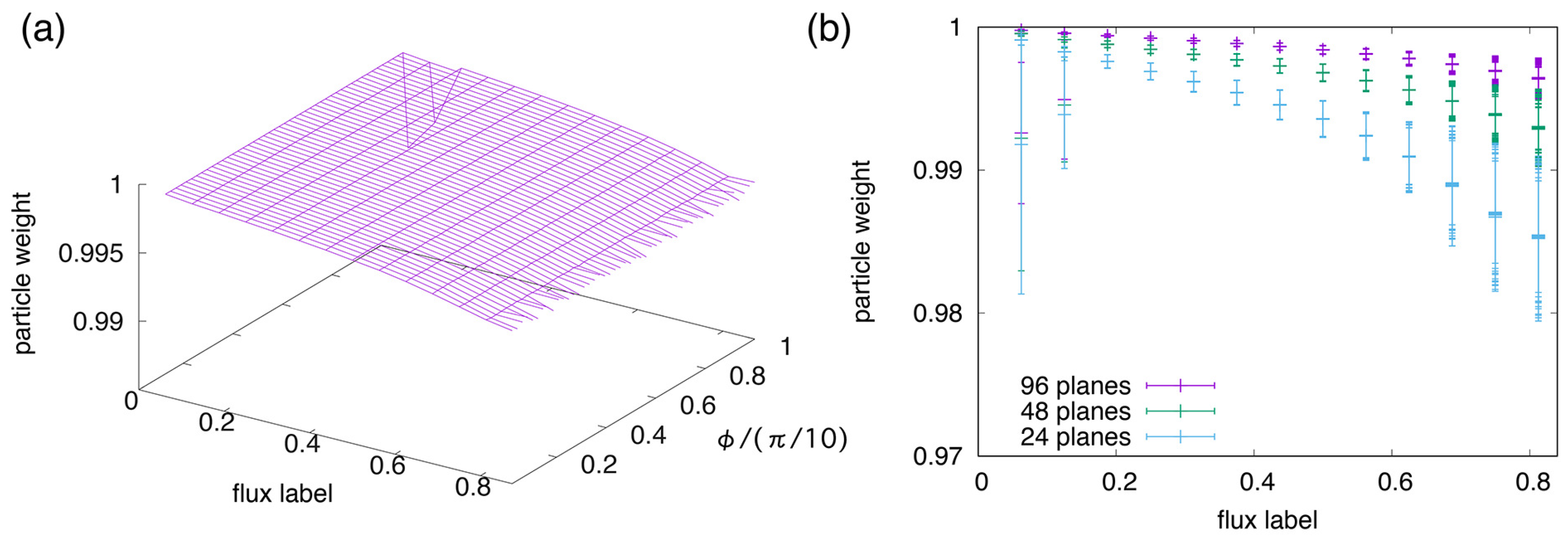
- The particle-mesh interpolation in “gather” and “scatter” processes is applied to a marker particle on the triangular mesh. The field-following interpolation in these procedures is observed to be confined within a certain number of triangle vertices. The particle weight is recovered by gathering the scattered weight without numerical dissipation related to the field following interpolation.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Federici, G.; Skinner, C.H.; Brooks, J.N.; Coad, J.P.; Grisolia, C.; Haasz, A.A.; Hassanein, A.; Philipps, V.; Pitcher, C.S.; Roth, J.; et al. Plasma-material interactions in current tokamaks and their implications for next step fusion reactors. Nucl. Fusion 2001, 41, 1967–2137. [Google Scholar] [CrossRef]
- Wagner, F.; Becker, G.; Behringer, K.; Campbell, D.; Eberhagen, A.; Engelhardt, W.; Fussmann, G.; Gehre, O.; Gernhardt, J.; Gierke, G.; et al. Regime of Improved Confinement and High Beta in Neutral-Beam-Heated Divertor Discharges of the ASDEX Tokamak. Phys. Rev. Lett. 1982, 49, 1408–1412. [Google Scholar] [CrossRef]
- Kim, E.J.; Diamond, P.H. Zonal Flows and Transient Dynamics of the L-H Transition. Phys. Rev. Lett. 2003, 90, 185006. [Google Scholar] [CrossRef] [PubMed]
- Loarte, A.; Saibene, G.; Sartori, R.; Riccardo, V.; Andrew, R.; Paley, J.; Fundamenski, W.; Eich, T.; Herrmann, A.; Pautasso, G.; et al. Transient heat loads in current fusion experiments, extrapolation to ITER and consequences for its operation. Phys. Scr. 2007, 222, 115021. [Google Scholar] [CrossRef]
- Ku, S.; Chang, C.S.; Diamond, P. Full-f gyrokinetic particle simulation of centrally heated global ITG turbulence from magnetic axis to edge pedestal top in a realistic tokamak geometry. Nucl. Fusion 2009, 49, 115021. [Google Scholar] [CrossRef]
- Chang, C.S.; Ku, S.; Loarte, A.; Parail, V.; Köchl, F.; Romanelli, M.; Maingi, R.; Ahn, J.-W.; Gray, T.; Hughes, J.; et al. Gyrokinetic projection of the divertor heat-flux width from present tokamaks to ITER. Nucl. Fusion 2017, 57, 116023. [Google Scholar] [CrossRef]
- Ku, S.; Hager, R.; Chang, C.S.; Kwon, J.M.; Parker, S.E. A new hybrid-Lagrangian numerical scheme for gyrokinetic simulation of tokamak edge plasma. J. Comput. Phys. 2016, 315, 467–475. [Google Scholar] [CrossRef]
- Yoon, E.S.; Chang, C.S. A Fokker-Planck-Landau collision equation solver on two-dimensional velocity grid and its application to particle-in-cell simulation. Phys. Plasmas 2014, 21, 032503. [Google Scholar] [CrossRef]
- Hager, R.; Yoon, E.S.; Ku, S.; D’Azevedo, E.F.; Worley, P.H.; Chang, C.S. A fully non-linear multi-species Fokker-Planck-Landau collision operator for simulation of fusion plasma. J. Comput. Phys. 2016, 315, 644–660. [Google Scholar] [CrossRef]
- Zhang, F.; Hager, R.; Ku, S.; Chang, C.S.; Jardin, S.C.; Ferraro, N.M. Mesh generation for confined fusion plasma simulation. Eng. Comput. 2016, 32, 285–293. [Google Scholar] [CrossRef]
- PETSc: Portable, Extensible Toolkit for Scientific Computation. Available online: https://www.mcs.anl.gov/petsc/ (accessed on 9 May 2019).
- Spitzer, L. The stellarator concept. Phys. Fluids 1958, 1, 253–264. [Google Scholar] [CrossRef]
- “XGC” DOE CODE 12570. Available online: https://www.osti.gov/doecode/biblio/12570-xgc (accessed on 9 May 2019).
- XGC0. Available online: https://epsi.pppl.gov/computing/xgc-0 (accessed on 9 May 2019).
- XGCa. Available online: https://epsi.pppl.gov/computing/xgca (accessed on 9 May 2019).
- XGC1. Available online: https://epsi.pppl.gov/computing/xgc-1 (accessed on 9 May 2019).
- Ku, S.; Chang, C.S.; Hager, R.; Churchill, R.M.; Tynan, G.R.; Cziegler, I.; Greenwald, M.; Hughes, J.; Parker, S.E.; Adams, M.F.; et al. A fast low-to-high confinement mode bifurcation dynamics in the boundary-plasma gyrokinetic code XGC. Phys. Plasmas 2018, 25, 056107. [Google Scholar] [CrossRef]
- D’Azevedo, E.; Stephen Abbott, S.; Koskela, T.; Worley, P.; Ku, S.; Ethier, S.; Yoon, E.; Shephard, M.; Hager, R.; Lang, J.; et al. Chapter 24. The Fusion Code XGC: Enabling Kinetic Study of Multiscale Edge Turbulent Transport in ITER”. In Exascale Scientific Applications: Scalability and Performance Portability; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Ohyabu, N.; Watanabe, T.; Ji, H.; Akao, H.; Ono, T.; Kawamura, T.; Yamazaki, K.; Akaishi, K.; Inoue, N.; Komori, A. The Large Helical Device (LHD) helical divertor. Nucl. Fusion 1994, 34, 387–399. [Google Scholar] [CrossRef]
- Toi, K.; Watanabe, F.; Ohdachi, S.; Morita, S.; Gao, X.; Narihara, K.; Sakakibara, S.; Tanaka, K.; Tokuzawa, T.; Urano, H.; et al. L-H Transition and Edge Transport Barrier Formation on LHD. Fusion Sci. Technol. 2010, 58, 61–69. [Google Scholar] [CrossRef]
- Lao, L.L.; John, H.S.; Stambaugh, R.D.; Kellman, A.G.; Pfeiffer, W. Reconstruction of current profile parameters and plasma shapes in tokamaks. Nucl. Fusion 1985, 25, 1611–1622. [Google Scholar] [CrossRef]
- Hirshman, S.P.; Whitson, J.C. Steepest-descent moment method for three-dimensional magnetohydrodynamic equilibria. Phys. Fluids 1983, 26, 3353–3568. [Google Scholar] [CrossRef]
- Lazerson, S.A. The virtual-casing principle for 3D toroidal systems. Plasma Phys. Control. Fusion 2012, 54, 12202. [Google Scholar] [CrossRef]
- Yamada, H.; The LHD experiment Group. Overview of results from the Large Helical Device. Nucl. Fusion 2011, 51, 094021. [Google Scholar] [CrossRef]
- Adams, M.F.; Ku, S.; Worley, P.H.; D’ Azevedo, E.; Cummings, J.C.; Chang, C.S. Scaling to 150K cores: Recent algorithm and performance engineering developments enabling XGC1 to run at scale. J. Phys. Conf. Ser. 2009, 180, 012036. [Google Scholar] [CrossRef]
- Hahm, T.S. Nonlinear gyrokinetic equations for tokamak microturbulence. Phys. Fluids 1988, 31, 2670–2673. [Google Scholar] [CrossRef]
- Lee, W. Gyrokinetic particle simulation model. J. Comput. Phys. 1987, 72, 243–269. [Google Scholar] [CrossRef]
- PSPLINE: Princeton Spline and Hermite Cubic Interpolation Routines. Available online: https://w3.pppl.gov/ntcc/PSPLINE/ (accessed on 9 May 2019).
- Hariri, F.; Ottaviani, M. A flux-coordinate independent field-aligned approach to plasma turbulence simulations. Comput. Phys. Commun. 2013, 184, 2419–2429. [Google Scholar] [CrossRef]
- Lee, W. Gyrokinetic approach in particle simulation. Phys. Fluids 1983, 26, 556–562. [Google Scholar] [CrossRef]
- Birdsall, C.K.; Langdon, A.B. Plasma Physics via Computer Simulation; The Adam Hilger Series on Plasma Physics; Taylor and Francis: New York, NY, USA, 1985. [Google Scholar]
- Sugama, H. Modern gyrokinetic formulation of collisional and turbulent transport in toroidally rotating plasmas. Rev. Mod. Plasma Phys. 2017, 1, 9. [Google Scholar] [CrossRef]
- Triangle: A Two-Dimensional Quality Mesh Generator and Delaunay Triangulator. Available online: https://www.cs.cmu.edu/~quake/triangle.html (accessed on 9 May 2019).
- McMillan, M.; Lazerson, S.A. BEAMS3D Neutral Beam Injection Model. Plasma Phys. Control. Fusion 2014, 56, 095019. [Google Scholar] [CrossRef]
- Spong, D.A.; Hirshman, S.P.; Berry, L.A.; Lyon, L.F.; Fowler, R.H.; Strickler, D.J.; Cole, M.J.; Nelson, B.N.; Williamson, D.E.; Ware, A.S.; et al. Physics issues of compact drift optimized stellarators. Nucl. Fusion 2001, 41, 711–716. [Google Scholar] [CrossRef]
- Lazerson, S. “STELLOPT“ DOE CODE 12551. Available online: https://www.osti.gov/doecode/biblio/12551-stellopt (accessed on 9 May 2019).
- Seki, R.; Matsumoto, Y.; Suzuki, Y.; Watanabe, K.; Itagaki, M.T. Particle Orbit Analysis in the Finite Beta Plasma of the Large Helical Device using Real Coordinates. Plasma Fusion Res. 2008, 3, 016. [Google Scholar] [CrossRef]
- Suzuki, Y.; Nakajima, N.; Watanabe, K.; Nakanura, Y.; Hayashi, T. Development and application of HINT2 to helical system plasmas. Nucl. Fusion 2006, 46, L19. [Google Scholar] [CrossRef]
- Egedal, J. Drift orbit topology of fast ions in tokamaks. Nucl. Fusion 2000, 40, 1597. [Google Scholar] [CrossRef]
- Satake, S.; Okamoto, N.; Nakajima, N.; Sugama, H.; Yokoyama, M.; Beidler, C.D. Non-local neoclassical transport simulation of geodesic acoustic mode. Nucl. Fusion 2005, 45, 1362–1368. [Google Scholar] [CrossRef]
- Winsor, N.; Johnson, J.; Dawson, J. Geodesic Acoustic Waves in Hydromagnetic Systems. Phys. Fluids 1968, 11, 2448–2450. [Google Scholar] [CrossRef]
- Moritaka, T.; Hager, R.; Cole, M.D.J.; Laserzon, S.; Satake, S.; Chang, C.S.; Ku, S.; Matsuoka, S.; Ishiguro, S. Gyrokinetic Modelling with an Extended Magnetic Equilibrium Including the Edge Region of Large Helical Device. In Proceedings of the 27th IAEA Fusion Energy Conference, Gandhinagar, India, 22–27 October 2018. [Google Scholar]
- Rosenbluth, M.N.; Hinton, F.L. Poloidal Flow Driven by Ion-Temperature-Gradient Turbulence in Tokamaks. Phys. Rev. Lett. 1998, 80, 724–727. [Google Scholar] [CrossRef]
- Sugama, H.; Watanabe, T.-H. Collisionless damping of zonal flows in helical systems. Phys. Plasmas 2005, 13, 012501. [Google Scholar] [CrossRef]
- Matsuoka, S.; Idomura, Y.; Satake, S. Neoclassical transport benchmark of global full-f gyrokinetic simulation in stellarator configurations. Phys. Plasmas 2018, 25, 022510. [Google Scholar] [CrossRef]
- Horton, W. Drift waves and transport. Rev. Mod. Phys. 1999, 71, 735–778. [Google Scholar] [CrossRef]
- Cole, M.D.J.; Moritaka, T.; Chang, C.S.; Hager, R.; Ku, S.-H.; Lazerson, S. Confinement in Stellarators with the Global Gyrokinetic Code XGC. In Proceedings of the 27th IAEA Fusion Energy Conference, Gandhinagar, India, 22–27 October 2018. [Google Scholar]









© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moritaka, T.; Hager, R.; Cole, M.; Lazerson, S.; Chang, C.-S.; Ku, S.-H.; Matsuoka, S.; Satake, S.; Ishiguro, S. Development of a Gyrokinetic Particle-in-Cell Code for Whole-Volume Modeling of Stellarators. Plasma 2019, 2, 179-200. https://doi.org/10.3390/plasma2020014
Moritaka T, Hager R, Cole M, Lazerson S, Chang C-S, Ku S-H, Matsuoka S, Satake S, Ishiguro S. Development of a Gyrokinetic Particle-in-Cell Code for Whole-Volume Modeling of Stellarators. Plasma. 2019; 2(2):179-200. https://doi.org/10.3390/plasma2020014
Chicago/Turabian StyleMoritaka, Toseo, Robert Hager, Michael Cole, Samuel Lazerson, Choong-Seock Chang, Seung-Hoe Ku, Seikichi Matsuoka, Shinsuke Satake, and Seiji Ishiguro. 2019. "Development of a Gyrokinetic Particle-in-Cell Code for Whole-Volume Modeling of Stellarators" Plasma 2, no. 2: 179-200. https://doi.org/10.3390/plasma2020014