





Algorithms 2026, 19(2), 151; https://doi.org/10.3390/a19020151 - 13 Feb 2026
Abstract
Misdiagnosing plant diseases often leads to a range of negative consequences, including the overuse of pesticides and unnecessary food waste. Traditionally, identifying diseases on plant leaves has relied on manual visual inspection, making it a complex and time-consuming task. Since the advent of
[...] Read more.
Misdiagnosing plant diseases often leads to a range of negative consequences, including the overuse of pesticides and unnecessary food waste. Traditionally, identifying diseases on plant leaves has relied on manual visual inspection, making it a complex and time-consuming task. Since the advent of convolutional neural networks, however, recognition performance for leaf diseases has improved significantly. Most contemporary studies that apply AI techniques to plant-leaf disease classification focus primarily on boosting accuracy, frequently overlooking the limitations posed by resource-constrained real-world environments. To address these challenges, this thesis employs knowledge distillation to enable small models to approximate the recognition capabilities of larger ones. We enhance a ShuffleNetV2-based model by integrating multi-scale feature extraction and a coordinate-attention mechanism, and we further improve the lightweight student model through knowledge distillation to boost its recognition performance. Experimental results show that the proposed model achieves 93.15% accuracy on the Plant Pathology 2021- FGVC8 dataset, utilizing only 0.36 M parameters and 0.0931 GFLOPs. Compared to the ResNet50 baseline, our architecture slashes parameters by nearly 98% while limiting the accuracy gap to a mere 1.6%. These results confirm the model’s ability to maintain robust performance with minimal computational overhead, providing a practical solution for precision agriculture on resource-limited edge devices.
Full article
(This article belongs to the Special Issue Machine Learning for Pattern Recognition (3rd Edition))
►
Show Figures
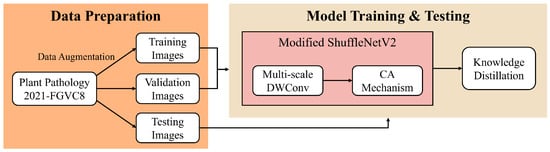
Figure 1





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}