Analysis of Longitudinal Guided Wave Propagation in a Liquid-Filled Pipe Embedded in Porous Medium

Abstract
:1. Introduction
2. Basic Equations and Problem Formulation
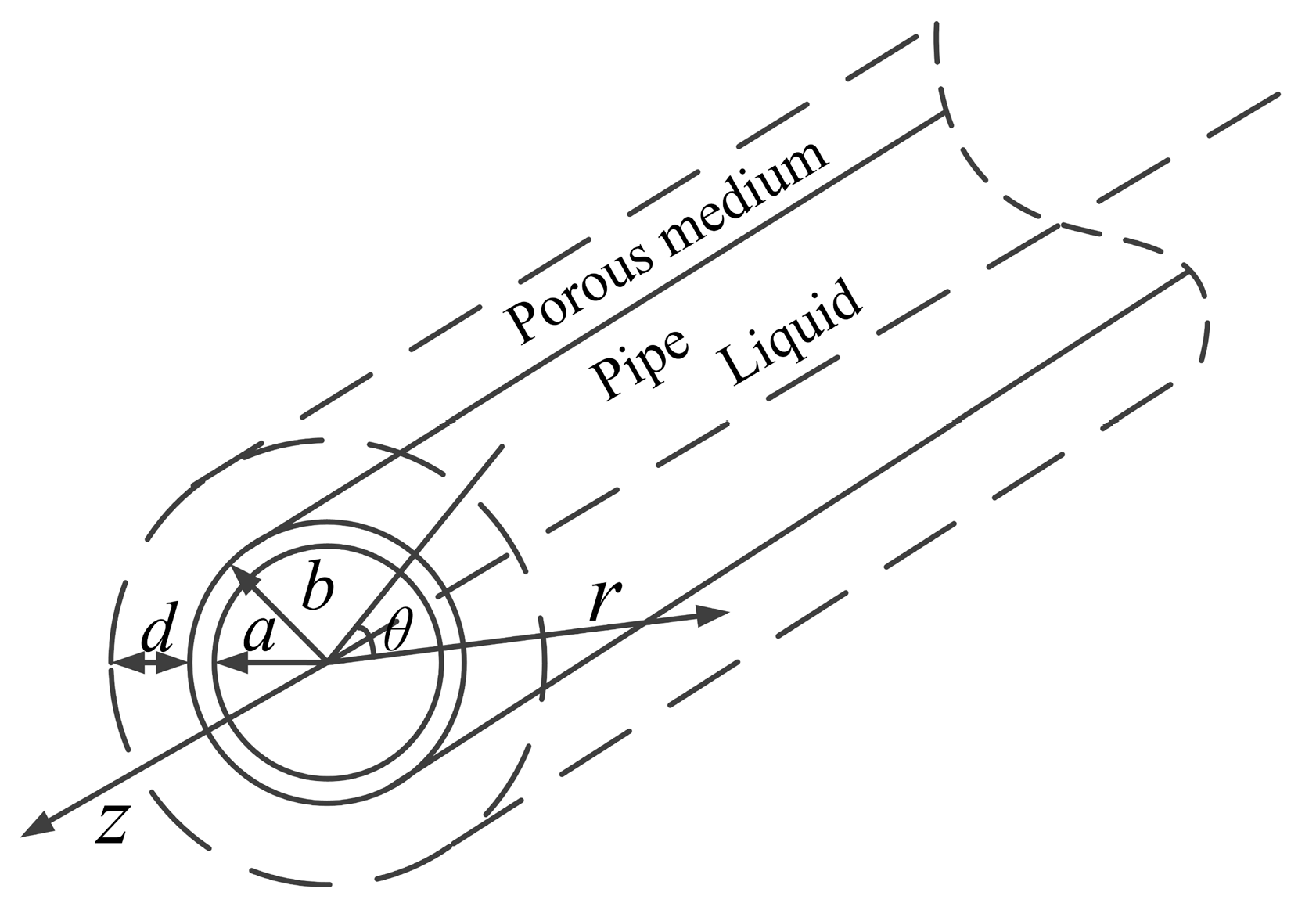
2.1. Geometric Model
2.2. Dispersion Equations
2.3. Theoretical Verification
3. Results and Discussion
3.1. Results for Time-Frequency-Domain
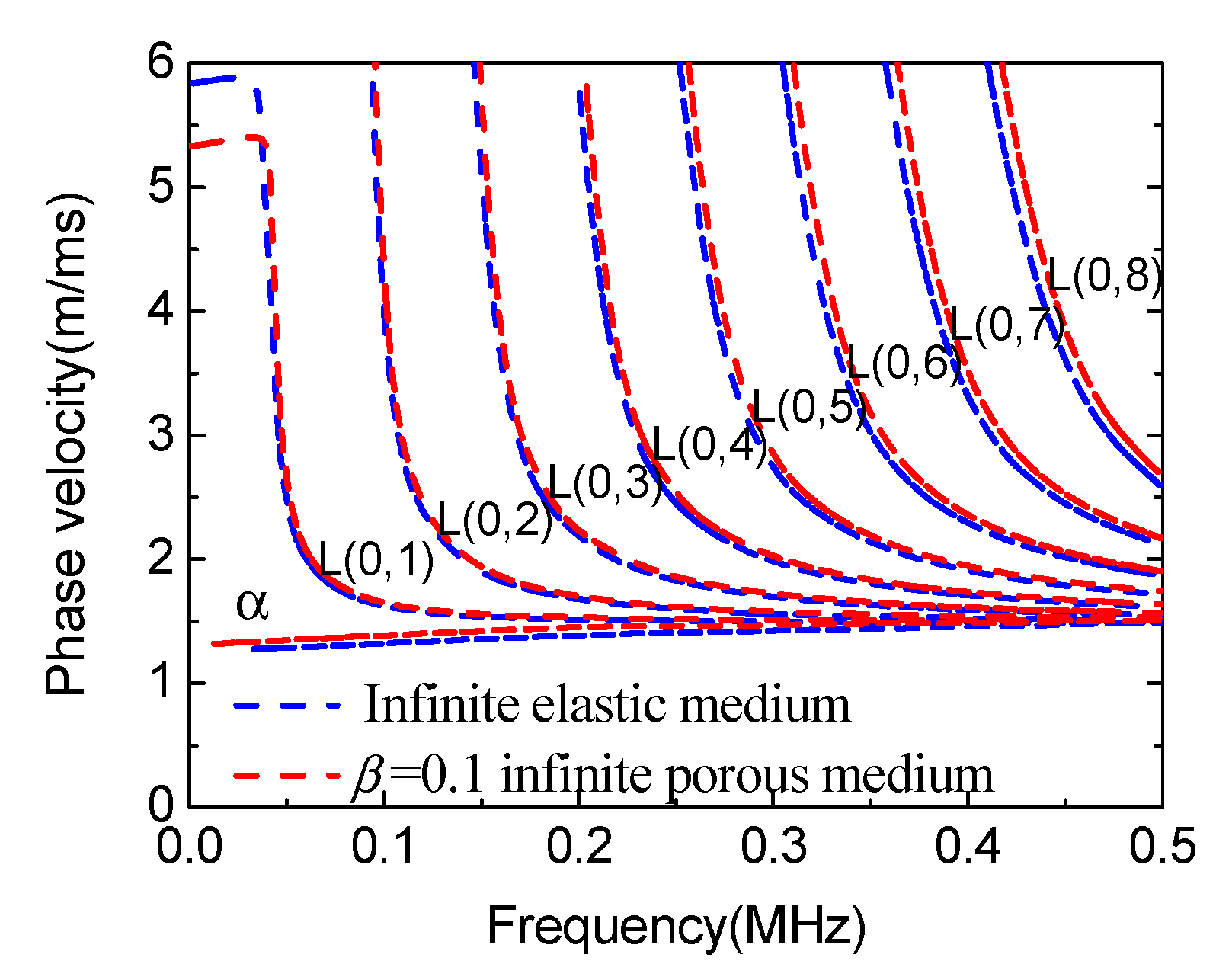
3.1.1. Water-Filled Pipe in Infinite Porous Medium
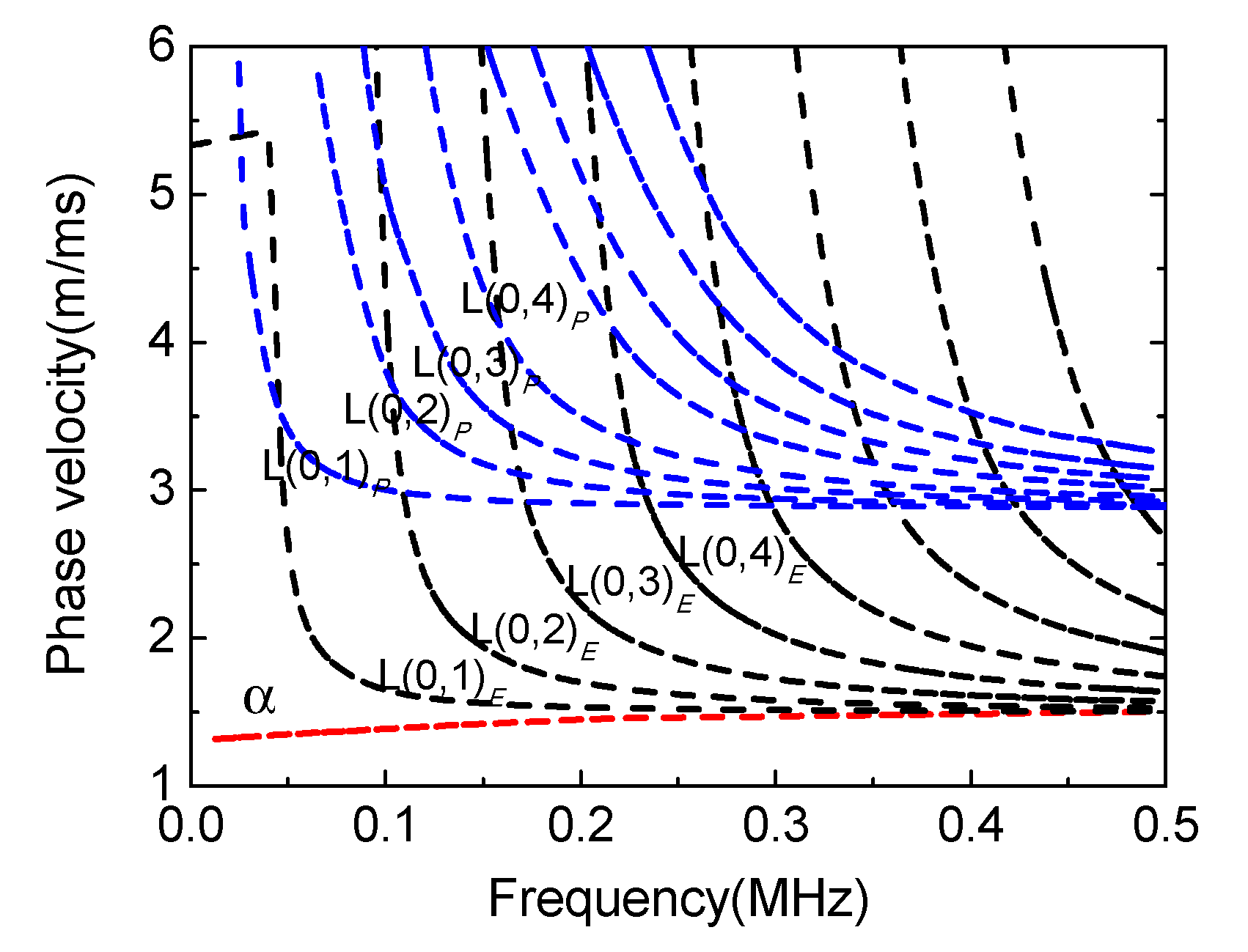
3.1.2. Water-Filled Pipe in Finite Porous Medium
3.1.3. Influence of Porosity
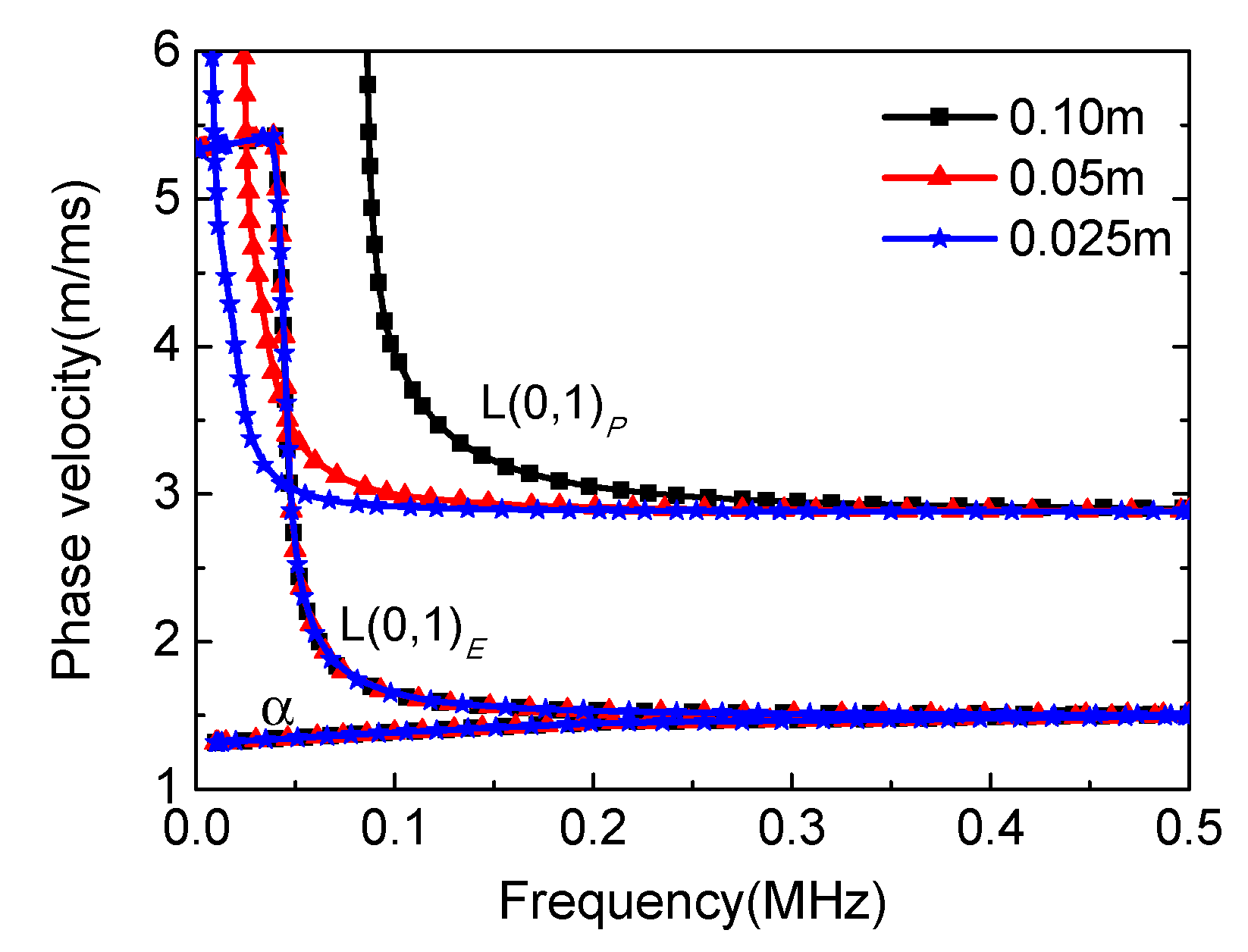
3.1.4. Influence of Finite Porosity Layer Thickness
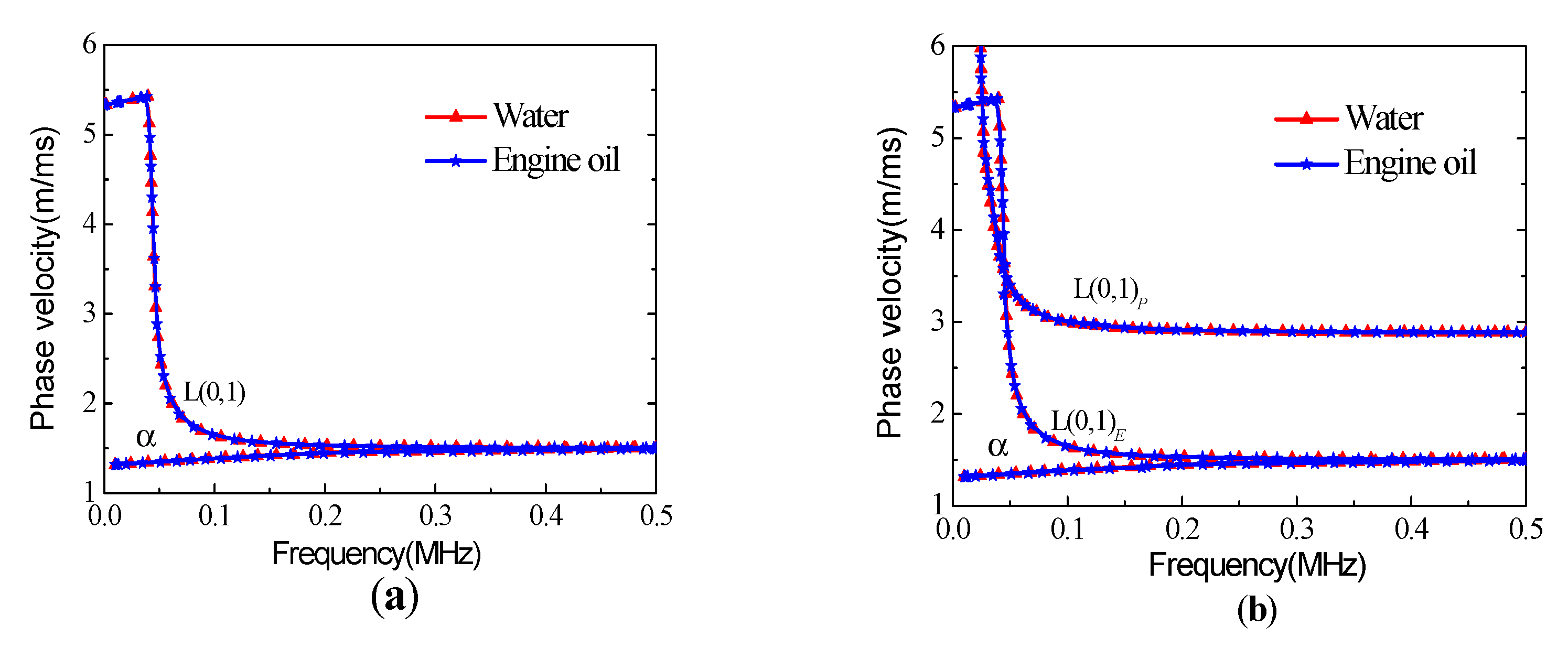
3.1.5. Influence of Pore Fluid
3.2. Results for Time Domain
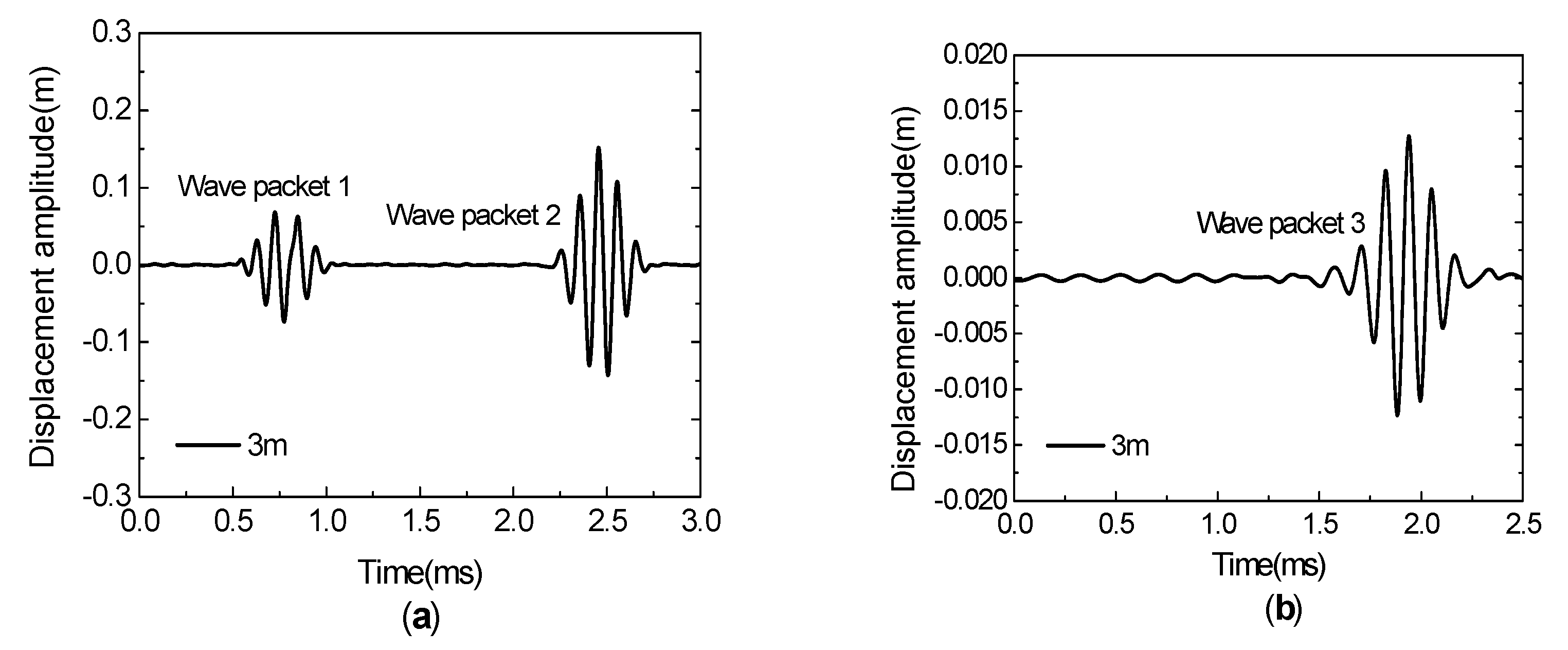
3.2.1. Discrimination of Guided Wave Modes
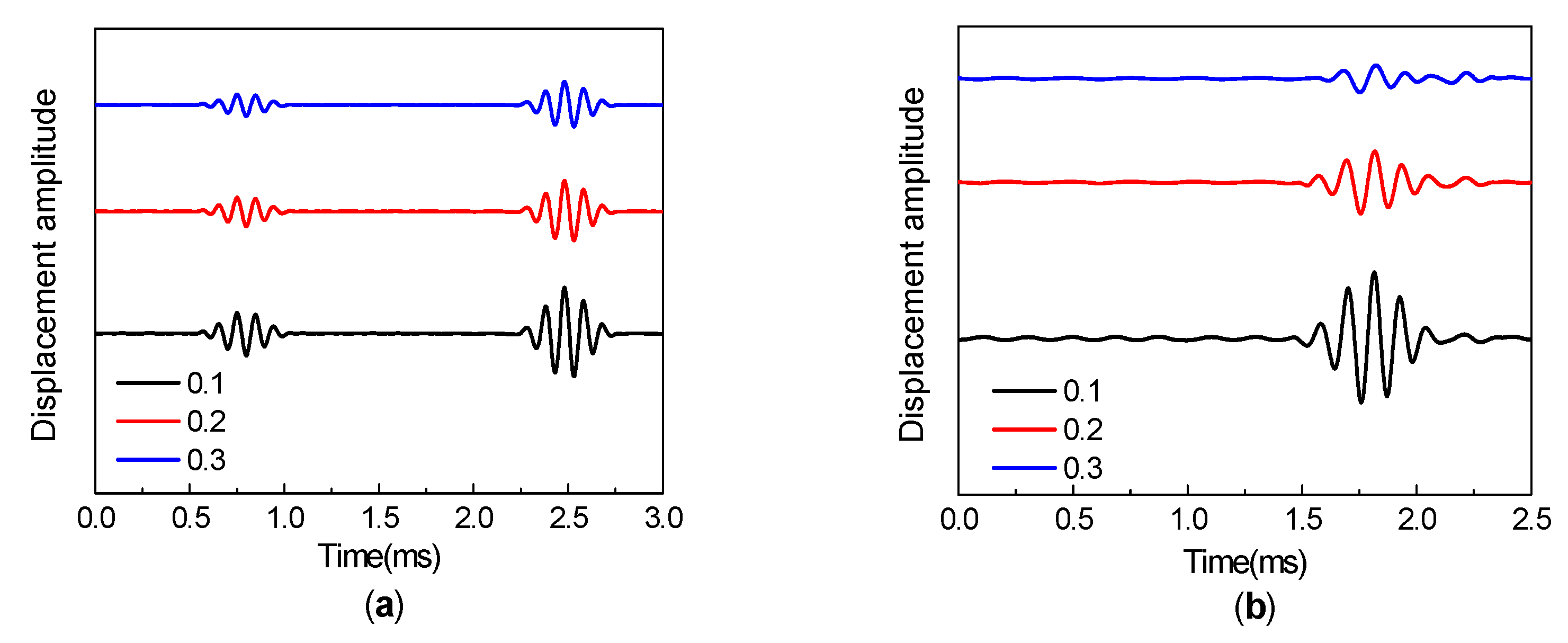
3.2.2. Influence of Porosity
3.2.3. Influence of Finite Porosity Layer Thickness
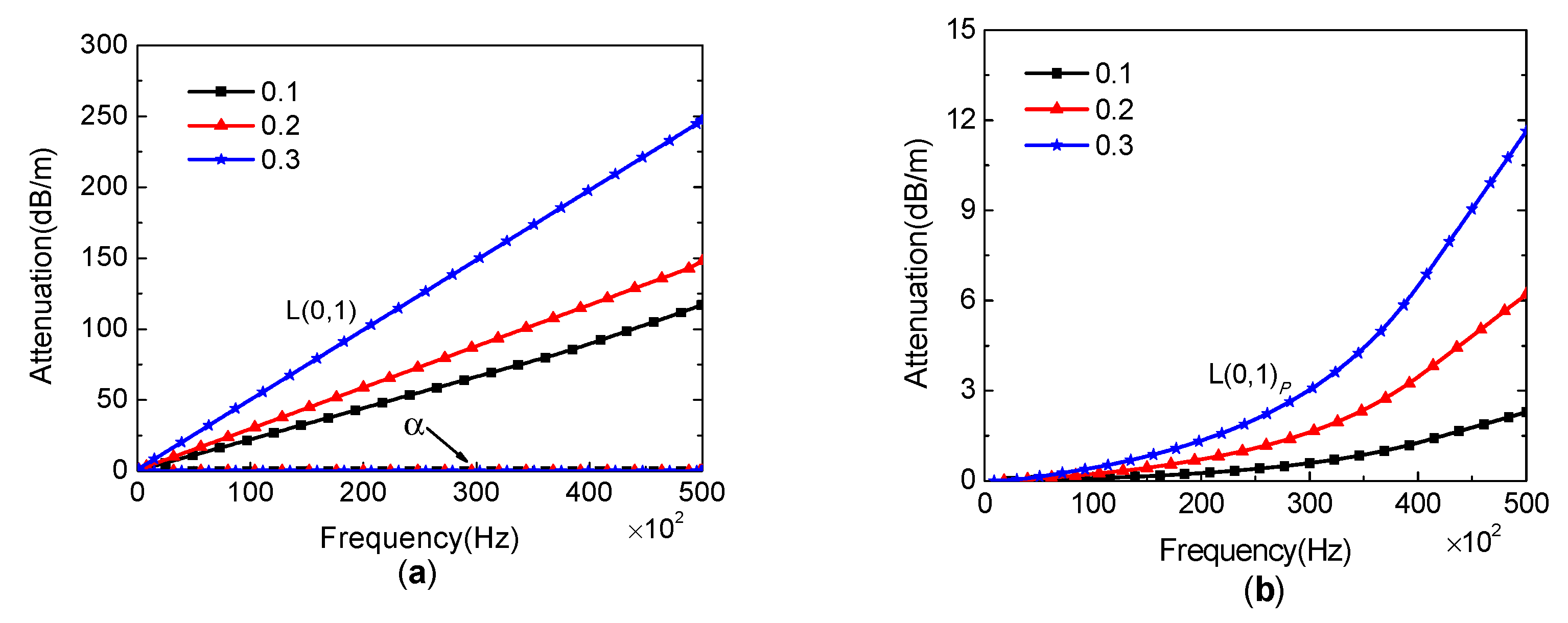
3.3. Results for Attenuation
4. Conclusions
- (1)
- The presence of a porous medium outside the pipe has no significant effect on the phase velocity of a water-filled pipe, compared with a water-filled pipe embedded in an infinite elastic medium;
- (2)
- The number of modes in a water-filled pipe embedded in a finite porous medium is more than that of a water-filled pipe embedded in an infinite porous medium in the dispersion curves;
- (3)
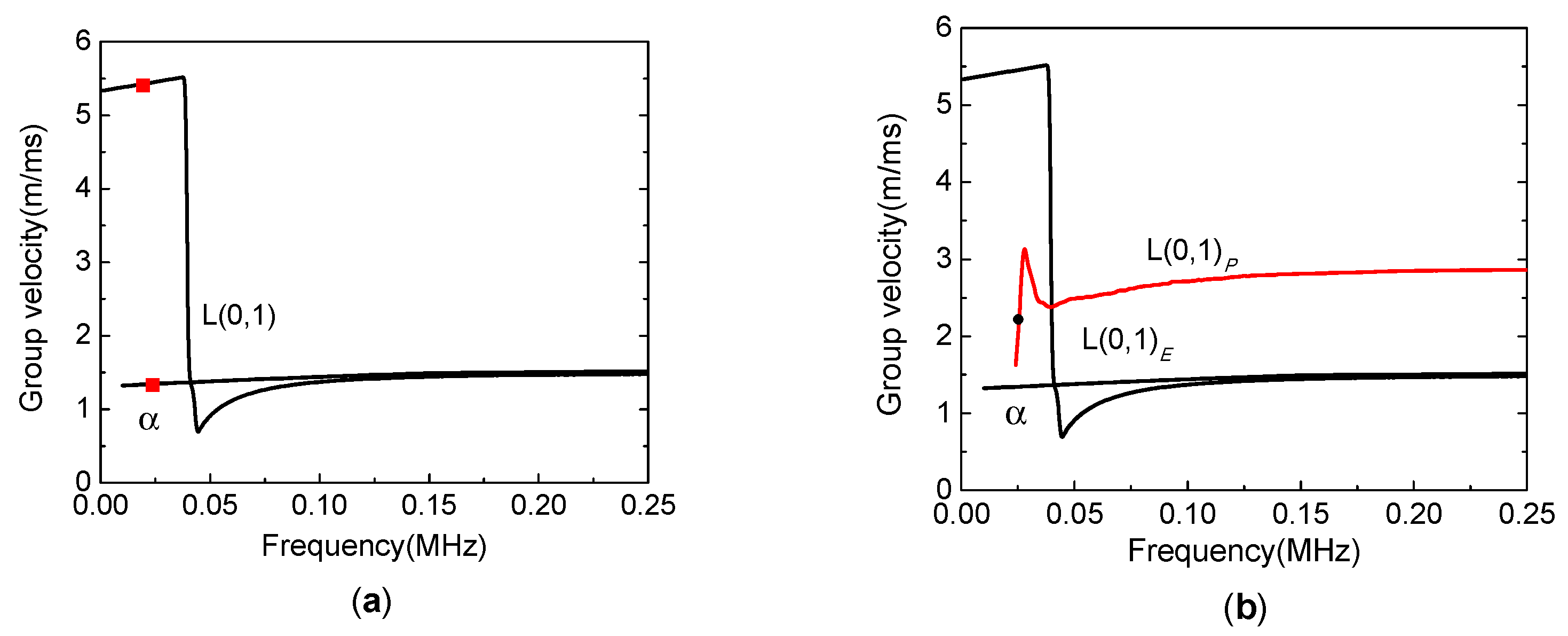
- The effect of the finite medium surrounding the liquid-filled pipe has been shown by the appearance of several modes (L(0,m)P, m = 1,2,3,…), and by the dependence of the phase velocity and displacement amplitude on an outer medium. A good agreement is thus obtained between the dispersion results, time-domain waveform, and attenuation;
- (4)
- The attenuation in a water-filled pipe when it is embedded in a finite porous medium is significantly less than that in a water-filled pipe embedded in an infinite porous medium;
- (5)
- The low attenuation L(0,1)P mode is easily excited and detected, and it is strongly influenced by porosity. As the porosity increases, the phase velocity and displacement amplitude gradually decrease. This explains why, in practice, the pore content in the medium outside the liquid-filled pipe can indirectly indicate a pipeline leak, and provide a certain theoretical support for nondestructive testing.
5. Patents
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Gazis, D.C. Three-dimensional investigation of the propagation of waves in hollow circular cylinders. I. Analytical foundation. J. Acoust. Soc. Am. 1959, 31, 573–578. [Google Scholar] [CrossRef]
- Pan, H.; Koyano, K.; Usui, Y. Experimental and numerical investigations of axisymmetric wave propagation in cylindrical pipe filled with fluid. J. Acoust. Soc. Am. 2003, 113, 3209–3214. [Google Scholar] [CrossRef] [PubMed]
- Duan, R.; Yang, K.; Ma, Y.; Chapman, N.R. A simple expression for sound attenuation due to surface duct energy leakage in low-latitude oceans. J. Acoust. Soc. Am. 2016, 139, EL118. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Muggleton, J.M.; Kalkowski, M.; Gao, Y.; Rustighi, E. A theoretical study of the fundamental torsional wave in buried pipes for pipeline condition assessment and monitoring. J. Sound Vib. 2016, 374, 155–171. [Google Scholar] [CrossRef]
- Nnaemeka, C.N.; Okorosaye-Orubiteine, K. Corrosion pattern of pipeline steel in petroleum pipeline water in the presence of biomas derived extracts of brassica oleracea and citrus paradise mesocarp. Mater. Sci. Appl. 2018, 9, 126–141. [Google Scholar]
- Duan, W.; Kirby, R. Guided wave propagation in buried and immersed fluid-filled pipes: Application of the semi analytic finite element method. Comput. Struct. 2019, 212, 236–247. [Google Scholar] [CrossRef]
- Yu, W.; Li, X. Propagation Characteristics and Defect Sensitivity Analysis of Guided Wave from Single Excitation Source in Elbows. IEEE Access 2019, 7, 75542–75549. [Google Scholar]
- Muggleton, J.M.; Brennan, M.J.; Pinnington, P.J. Wavenumber prediction of waves in buried pipes for water leak detection. J. Sound Vib. 2002, 249, 939–954. [Google Scholar] [CrossRef]
- Gao, Y.; Sui, F.; Muggleton, J.M.; Yang, J. Simplified dispersion relationships for fluid-dominated axisymmetric wave motion in buried fluid-filled pipes. J. Sound Vib. 2016, 375, 386–402. [Google Scholar] [CrossRef]
- Sinha Bikash, K. Axisymmetric wave propagation in fluid-loaded cylindrical shells. i: Theory. J. Acoust. Soc. Am. 2019, 92, 1132–1143. [Google Scholar] [CrossRef]
- Lafleur, L.D.; Shields, F.D. Low-frequency propagation modes in a liquid-filled elastic tube waveguide. J. Acoust. Soc. Am. 1995, 97, 1435–1445. [Google Scholar] [CrossRef]
- Aristégui, C.; Lowe, M.; Cawley, P. Guided waves in fluid-filled pipes surrounded by different fluids. Ultrasonics 1999, 39, 367–375. [Google Scholar] [CrossRef]
- Long, R.; Lowe, M.; Cawley, P. Attenuation characteristics of the fundamental modes that propagate in buried iron water pipes. Ultrasonics 2003, 41, 509–519. [Google Scholar] [CrossRef]
- Siqueira, M.H.S.; Gatts, C.E.N.; da Silva, R.R.; Rebello, J.M.A. The use of ultrasonic guided waves and wavelets analysis in pipe inspection. Ultrasonics 2004, 41, 785–797. [Google Scholar] [CrossRef]
- Leinov, E.; Lowe, M.; Cawley, P. Investigation of guided wave propagation and attenuation in pipe buried in sand. J. Sound Vib. 2015, 347, 96–114. [Google Scholar] [CrossRef] [Green Version]
- Cui, H.; Lin, W.; Zhang, H.; Wang, X.; Trevelyan, J. Backward waves with double zero-group-velocity points in a liquid-filled pipe. J. Acoust. Soc. Am. 2016, 139, 1179–1194. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Long, R.; Cawley, P.; Lowe, M.J.S. Acoustic wave propagation in buried iron water pipes. Proc. Math. Phys. Eng. Sci. 2003, 459, 2749–2770. [Google Scholar] [CrossRef]
- Ambrosini, R.D. Material damping vs. radiation damping in soil–structure interaction analysis. Comput. Geotech. 2006, 33, 86–92. [Google Scholar] [CrossRef]
- Guan, W.; Hu, H.; He, X. Finite-difference modeling of the monopole acoustic logs in a horizontally stratified porous formation. J. Acoust. Soc. Am. 2009, 125, 1942–1950. [Google Scholar] [CrossRef]
- Markov, A.M.; Markov, M.G.; Ronquillo, J.G.; Sadovnychiy, S.N. Acoustic reverberation in a logging tool-borehole-saturated porous medium system. Izv. Phys. Solid Eart. 2014, 50, 289–295. [Google Scholar] [CrossRef]
- Zhou, F.; Giannakis, I.; Giannopoulos, A.; Holliger, K.; Slob, E. Estimating reservoir permeability with borehole radar. Geophysics 2020, 85, 1–42. [Google Scholar] [CrossRef]
- Wang, W.; Zhu, X.; Liu, J.; Cui, Z. Shear-horizontal transverse-electric seismoelectric waves in cylindrical double layer porous media. Chin. Phys. B 2021, 30, 014301. [Google Scholar] [CrossRef]
- Biot, M.A. Theory of propagation of elastic waves in a fluid-saturated porous solid. I. Low-frequency range. J. Acoust. Soc. Am. 1956, 28, 168–178. [Google Scholar] [CrossRef]
- Biot, M.A. Theory of propagation of elastic waves in a fluid-saturated porous solid. II. Higher frequency range. J. Acoust. Soc. Am. 1956, 28, 179–191. [Google Scholar] [CrossRef]
- Biot, M.A. Mechanics of deformation and acoustic propagation in porous media. J. Appl. Phys. 1962, 33, 1483–1498. [Google Scholar] [CrossRef]
- Biot, M.A. Theory of viscous buckling of multilayered fluids undergoing finite strain. Phys. Fluids 1964, 7, 855–861. [Google Scholar] [CrossRef]
- Johnson, D.L.; Koplik, J.; Dashen, R. Theory of dynamic permeability and tortuosity in fluid-saturated porous media. J. Fluid Mech. 1987, 176, 379–402. [Google Scholar] [CrossRef]
- Mohr, W.; Holler, P. On inspection of thin-walled tubes for transverse and longitudinal flaws by guided ultrasonic waves. IEEE Trans. Sonics Ultrason. 1976, 23, 369–373. [Google Scholar] [CrossRef]
- Cui, H.; Zhang, B.; Ji, S. Propagation characteristics of guided waves in a rod surrounded by an infinite solid medium. Acoust. Phys. 2010, 56, 412–421. [Google Scholar] [CrossRef]
- Butt, H.S.U.; Xue, P.; Jiang, T.; Wang, B. Parametric identification for material of viscoelastic SHPB from wave propagation data incorporating geometrical effects. Int. J. Mech. Sci. 2015, 91, 46–54. [Google Scholar] [CrossRef]
- Van Dalen, K.N.; Drijkoningen, G.G.; Smeulders, D.M.J. On wavemodes at the interfaxce of a fluid and a fluid-saturated poroelastic solid. J. Acoust. Soc. Am. 2010, 127, 40–51. [Google Scholar] [CrossRef]
- Qingrui, L.; Katsube, N. The discovery of a second kind of rotational wave in a fluid-filled porous material. J. Acoust. Soc. Am. 1990, 88, 1045–1053. [Google Scholar]
- Mavko, G.; Jizba, D. Estimating grain-scale fluid effects on velocity dispersion in rocks. Geophysics 1991, 56, 1940–1949. [Google Scholar] [CrossRef]
- Xi, Z.; Yam, L.H.; Leung, T.P. Free vibration of a partially fluid-filled cross-ply laminated composite circular cylindrical shell. J. Acoust. Soc. Am. 1997, 28, 359–374. [Google Scholar] [CrossRef]
- Chang, C.; Yuan, F. Extraction of Guided Wave Dispersion Curve in Isotropic and Anisotropic Materials by Matrix Pencil Method. Ultrasonics 2018, 89, 143–154. [Google Scholar] [CrossRef]
- Parra, J.O.; Xu, P. Dispersion and attenuation of acoustic guided waves in layered fluid-filled porous media. J. Acoust. Soc. Am. 1994, 95, 91–98. [Google Scholar] [CrossRef]
- Gravenkamp, H.; Birk, C.; Van, J. Modeling ultrasonic waves in elastic waveguides of arbitrary cross-section embedded in infinite solid medium. Comput. Struct. 2015, 149, 61–71. [Google Scholar] [CrossRef]
- Su, N.; Han, Q.; Jiang, J. Guided circumferential wave propagation characteristics for porous cylinder immersed in infinite fluid. Acta Phys. Sin. 2019, 68, 152–160. [Google Scholar]
- Abdelouahab, N.B.; Gossard, A.; Marlière, C.; Faure, P.; Rodts, S.; Coussot, P. Controlled imbibition in a porous medium from a soft wet material (poultice). Soft Matter 2019, 15, 6732–6741. [Google Scholar] [CrossRef]
- Chang, S.; Liu, L.; Johnson, D.L. Low-frequency tube waves in permeable rocks. Geophysics 1988, 53, 519–527. [Google Scholar] [CrossRef]
- Marston, P.L. Negative group velocity lamb waves on plates and applications to the scattering of sound by shells. J. Acoust. Soc. Am. 2003, 113, 2659–2662. [Google Scholar] [CrossRef] [PubMed]
- Jiang, J.; Han, Q.; Xu, Z.; Jia, J.; Liang, D.; Zhong, X. Propagation characteristics of guided waves in a liquid filled pipe embedded in a porous medium. Acta Acust. 2020, 39, 96–109. [Google Scholar]
- Lowe, M.J.S.; Cawley, P. The applicability of plate wave techniques for the inspection of adhesive and diffusion bonded joints. J. Nondestruct. Eval. 1994, 13, 185–200. [Google Scholar] [CrossRef]
- Chotiros, N.P. Acoustics of the Seabed as a Poroelastic Medium; ASA: Austin, TX, USA, 2017. [Google Scholar]
- Chernoyarov, O.V.; Lysina, E.A.; Marcokova, M.; Dachian, S. Statistical analysis of fast fluctuating random signals with arbitrary-function envelope under breach of consistency of discontinuous information parameter estimate. In Proceedings of the International Siberian Conference on Control and Communications (SIBCON), Omsk, Russia, 21–23 May 2015; pp. 1–11. [Google Scholar]
- Haroun, N.A.H.; Mondal, S.; Sibanda, P. Hydromagnetic nanofluids flow through a porous medium with thermal radiation, chemical reaction and viscous dissipation using the spectral relaxation method. Int. J. Comput. Meth. 2017, 16, 1840020. [Google Scholar] [CrossRef]
- Chinta, N.; Syed, A.S.; Modem, R.; Mangipudi, V.R. A Study on Propagation of Waves in a Transversely Isotropic Poroelastic Layer Bounded between Two Viscous Liquids. Open J. Acoust. 2019, 9, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Gao, Y.; Liu, Y.; Muggleton, J.M. Axisymmetric fluid-dominated wave in fluid-filled plastic pipes: Loading effects of surrounding elastic medium. Appl. Acoust. 2017, 116, 43–49. [Google Scholar] [CrossRef]
- Barshinger, J.N.; Rose, J.L. Guided wave propagation in an elastic hollow cylinder coated with a viscoelastic material. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2004, 51, 1547–1556. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Density (kg/m3) | Longitudinal Velocity (m/s) | Shear Velocity (m/s) | |
|---|---|---|---|---|
| Pipe | 7800 | 4100 | 2100 | |
| Porous medium | solid skeleton Pore fluid | 2700 | 5370 | 3100 |
| 998 | 1483 | |||
| Water | 998 | 1483 | ||
| Parameter | Simulation Value |
|---|---|
| Pore curvature | 5.5 |
| Static permeability κ0 | 1.0 × 10−12 m2 |
| Viscous coefficient n | 0.001 kg/(s·m) |
| Bulk modulus of fluid KPL | 2.19 GPa |
| Bulk modulus of solid skeleton KPb | 33.70 GPa |
| Shear modulus of solid skeleton N | 20.86 GPa |
| Bulk modulus of solid matrix KPS | 43.33 GPa |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Su, N.; Han, Q.; Yang, Y.; Shan, M.; Jiang, J. Analysis of Longitudinal Guided Wave Propagation in a Liquid-Filled Pipe Embedded in Porous Medium. Appl. Sci. 2021, 11, 2281. https://doi.org/10.3390/app11052281
Su N, Han Q, Yang Y, Shan M, Jiang J. Analysis of Longitudinal Guided Wave Propagation in a Liquid-Filled Pipe Embedded in Porous Medium. Applied Sciences. 2021; 11(5):2281. https://doi.org/10.3390/app11052281
Chicago/Turabian StyleSu, Nana, Qingbang Han, Yu Yang, Minglei Shan, and Jian Jiang. 2021. "Analysis of Longitudinal Guided Wave Propagation in a Liquid-Filled Pipe Embedded in Porous Medium" Applied Sciences 11, no. 5: 2281. https://doi.org/10.3390/app11052281