Continuous-Discrete Path Integral Filtering

Abstract
:1. Introduction
2. Review of Continuous-Discrete Filtering Theory
2.1. Langevin Equation and the FPKfe
2.2. Fundamental Solution of the FPKfe
2.3. Continuous-Discrete Filtering
3. Path Integral Formulas
3.1. Additive Noise
3.2. Multiplicative Noise
4. Dirac-Feynman Path Integral Filtering
4.1. Dirac-Feynman Approximation
4.2. The Dirac-Feynman Algorithm
- From the state model, obtain the expression for the Lagrangian. Specifically,
- For the additive noise case, the Lagrangian is given by Equation 11;
- For the multiplicative noise case with Itô discretization the Lagrangian is given by Equation 16, while for the general discretization the action is given in Appendix A..
- Determine a one-step discretized Lagrangian that depends on (and for the multiplicative noise).
- At time
- (a)
- The prediction step is accomplished bywhere is the grid measure. Note that is simply the initial condition .
- (b)
- The measurement at time are incorporated in the correction step via
4.3. Practical Computational Strategies
- Pre-compute the transition probability tensor with pre-determined and fixed grid. The exponential nature of the transition probability density can be used to speed the precomputation step considerably. Specifically, rather than computing to every grid point from a given point, one can omit computation to a final point which is unlikely to be reachable under the assumed dynamics. This is illustrated in the examples. For the correction step, there are two options:
- (a)
- Compute the correction at all the grid points;
- (b)
- Compute the correction only where the prediction result is significant.
- Another option is to use a focussed adaptive grid, much as in PDE approaches. Specifically, at each time step:
- (a)
- Find where the prediction step result is significant;
- (b)
- Find the domain in the state space where the conditional probability density is significant, and possibly interpolate. For the multi-modal case, there would be several disjoint regions;
- (c)
- Compute the transition probability tensor with those points as initial points and propagate to points in region suggested by state model.
- Pre-compute the solution using basis functions. For instance, in many applications wavelets have been known to provide a sparse and compact representation of a wide variety of functions arising in practice. The evolution of the wavelet basis functions can be computed using Equation 4. Then, instead of storing the transition probability tensor, FPKfe solutions with wavelet basis functions can be stored and used for filtering computations.
5. Examples
5.1. Example 1






5.2. Example 2






5.3. Example 3


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
6. Additional Remarks
6.1. Additional Comments
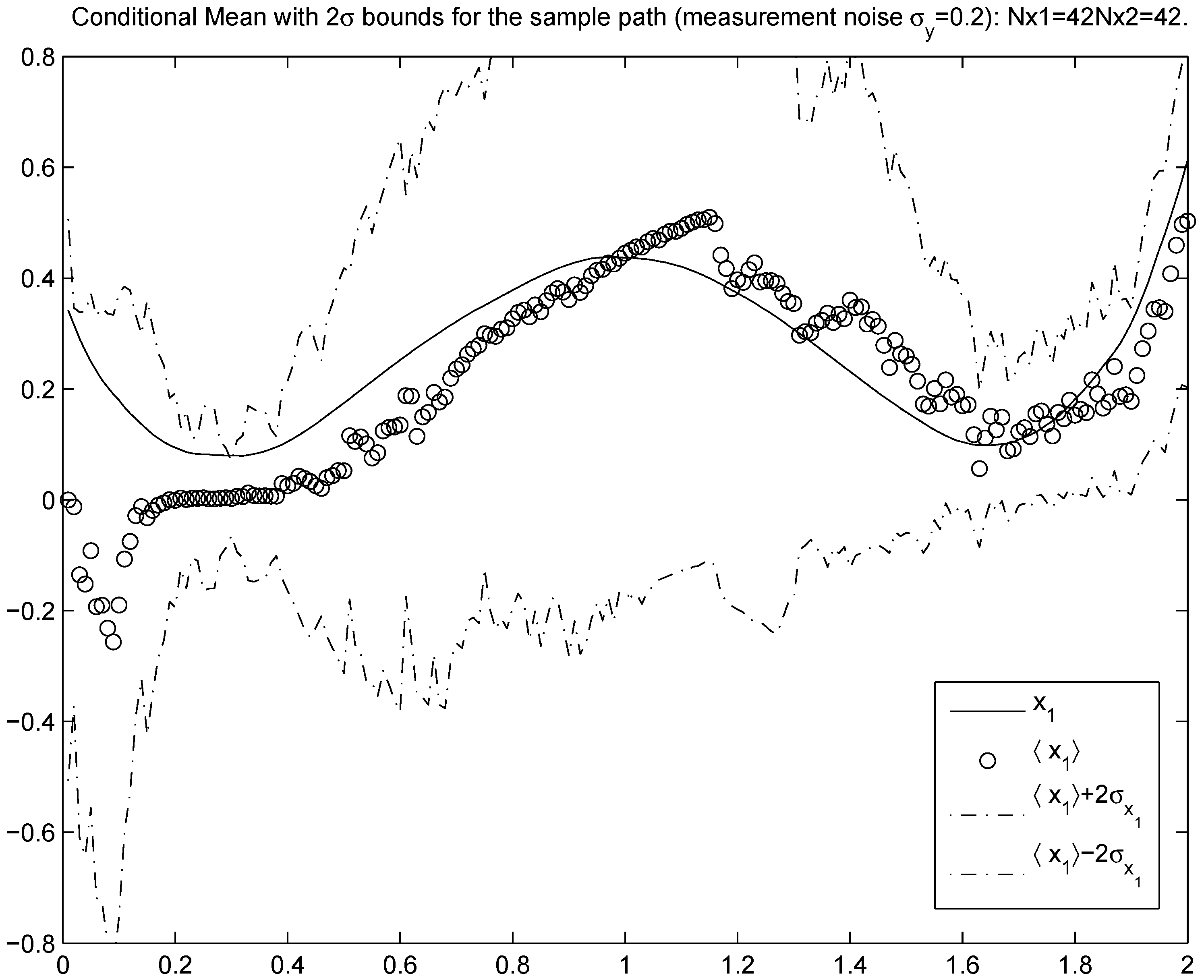
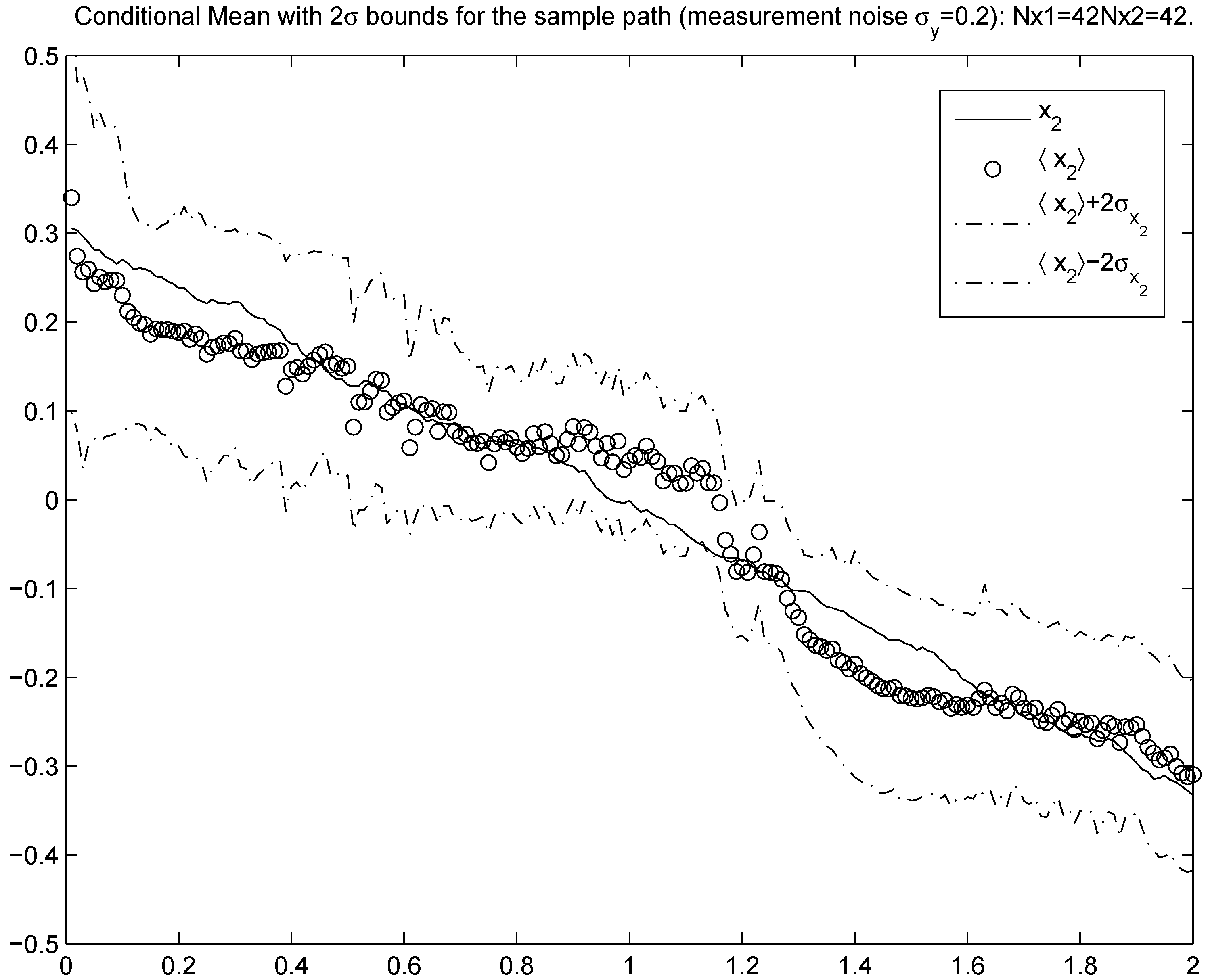
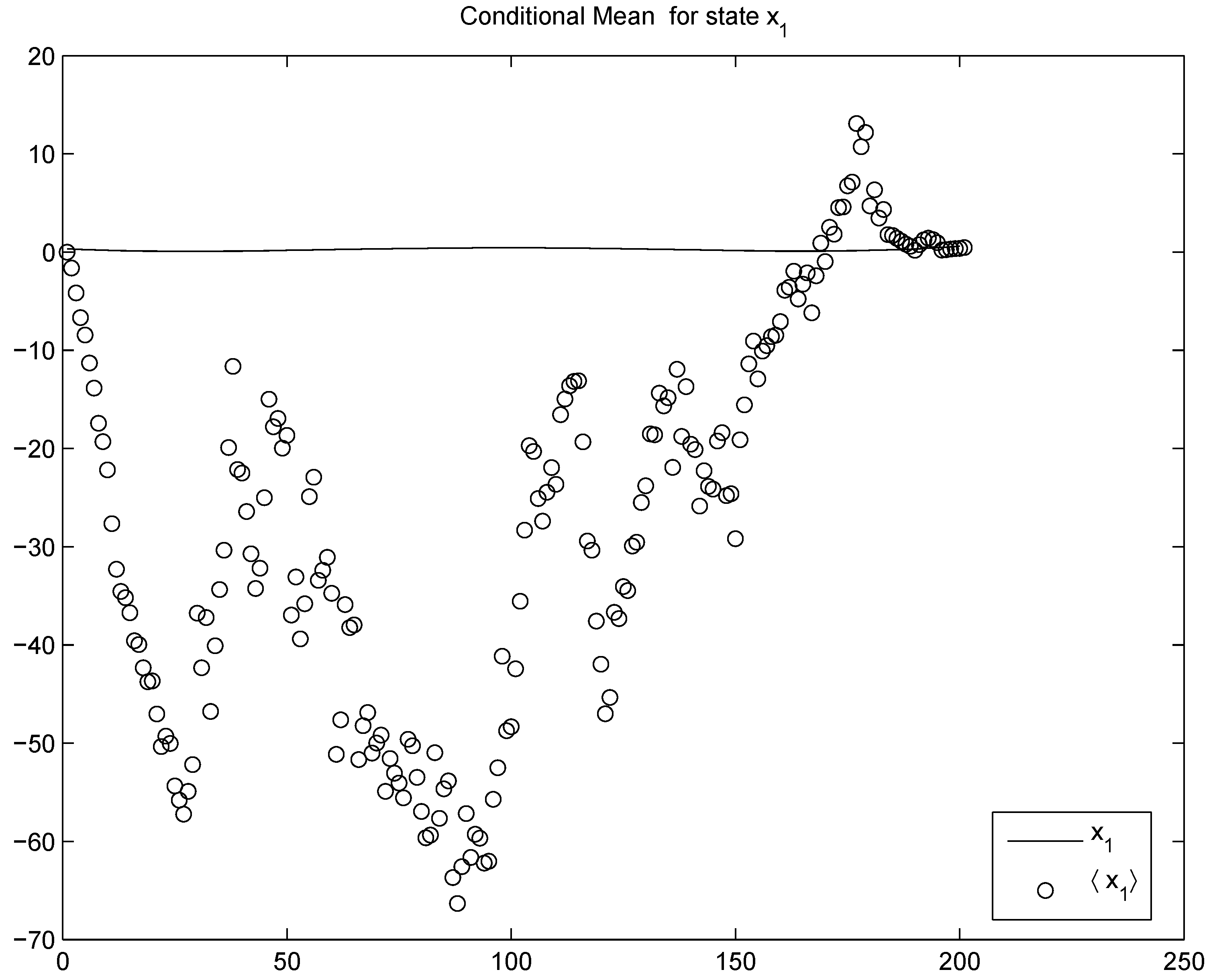
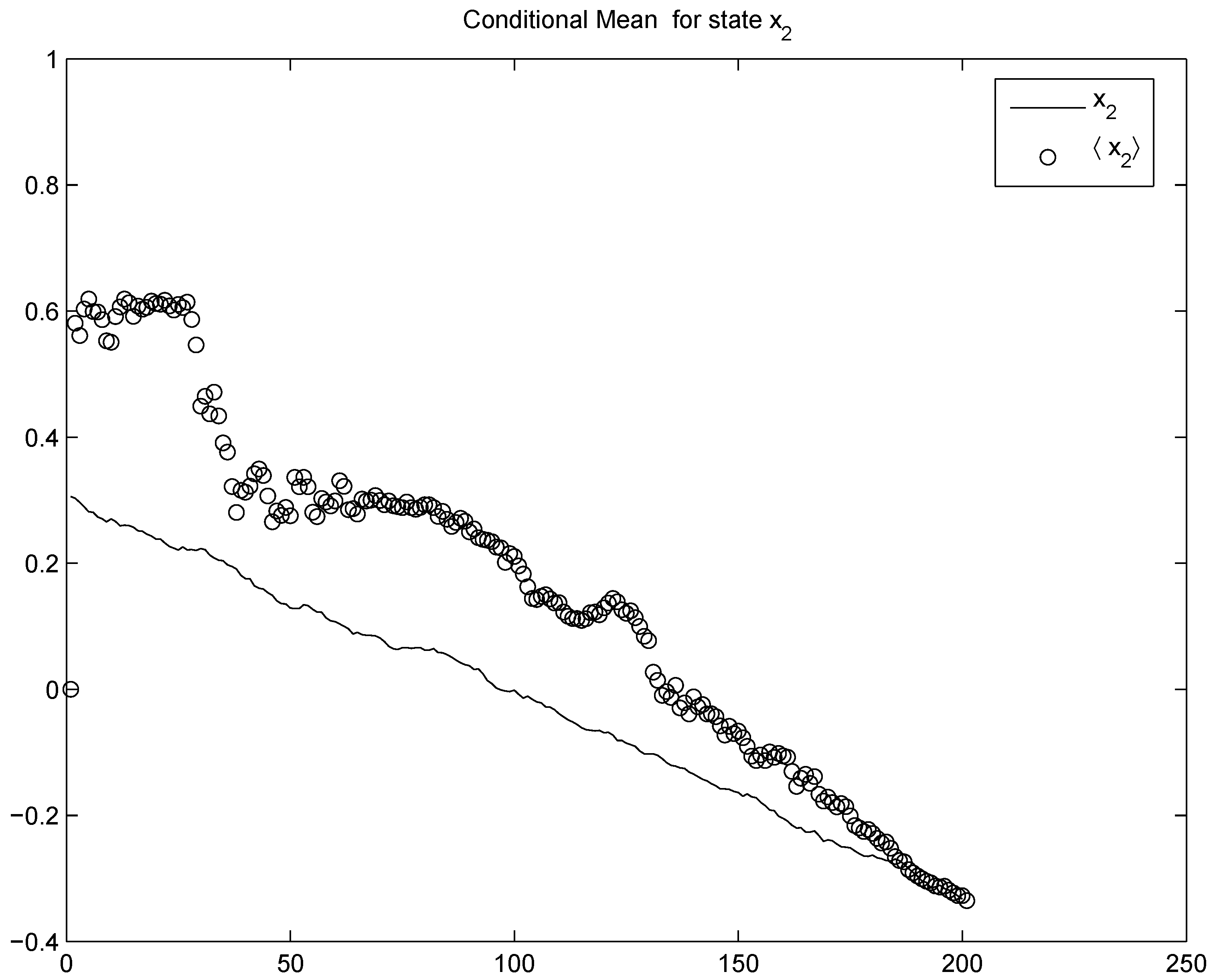
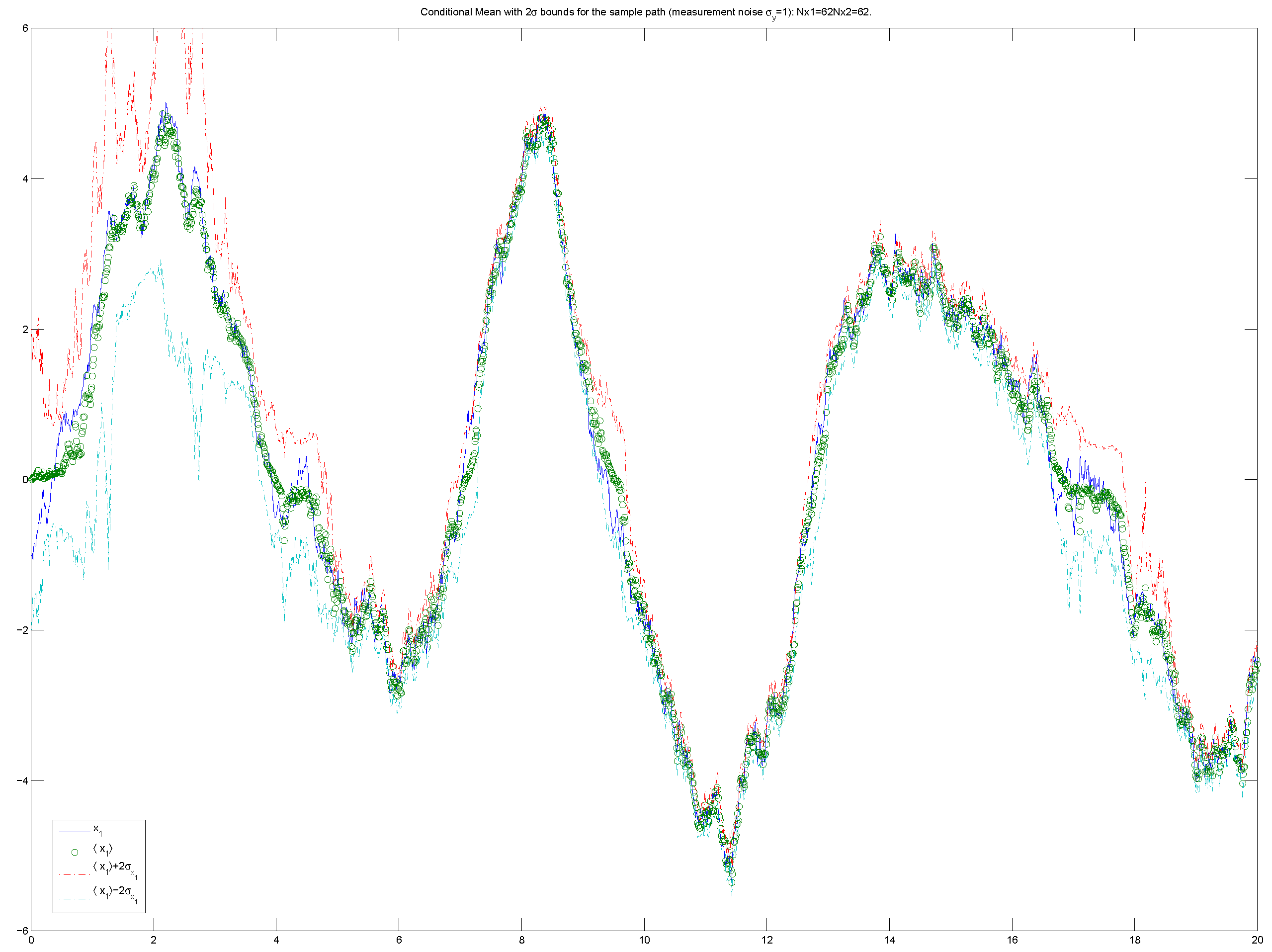
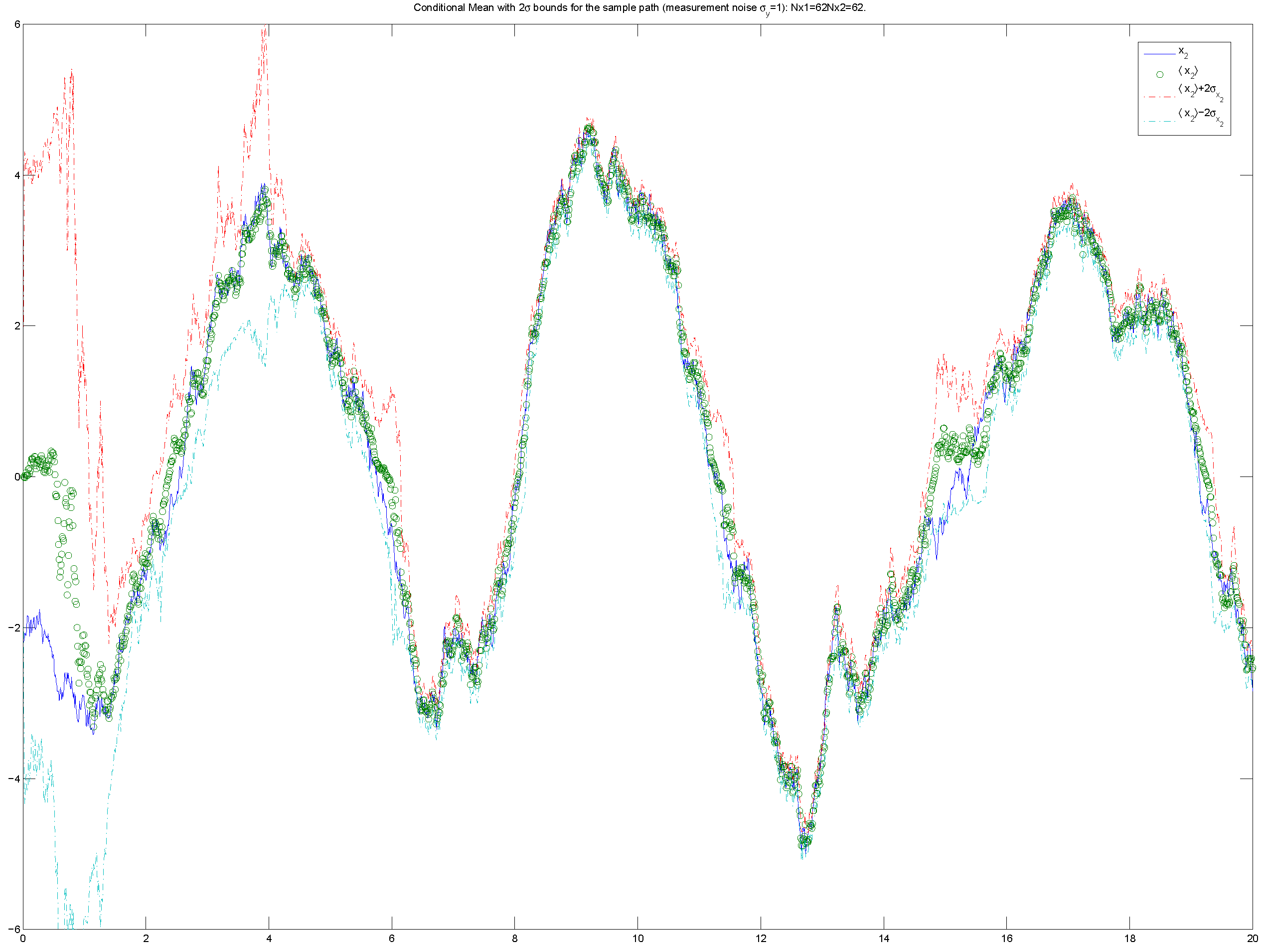
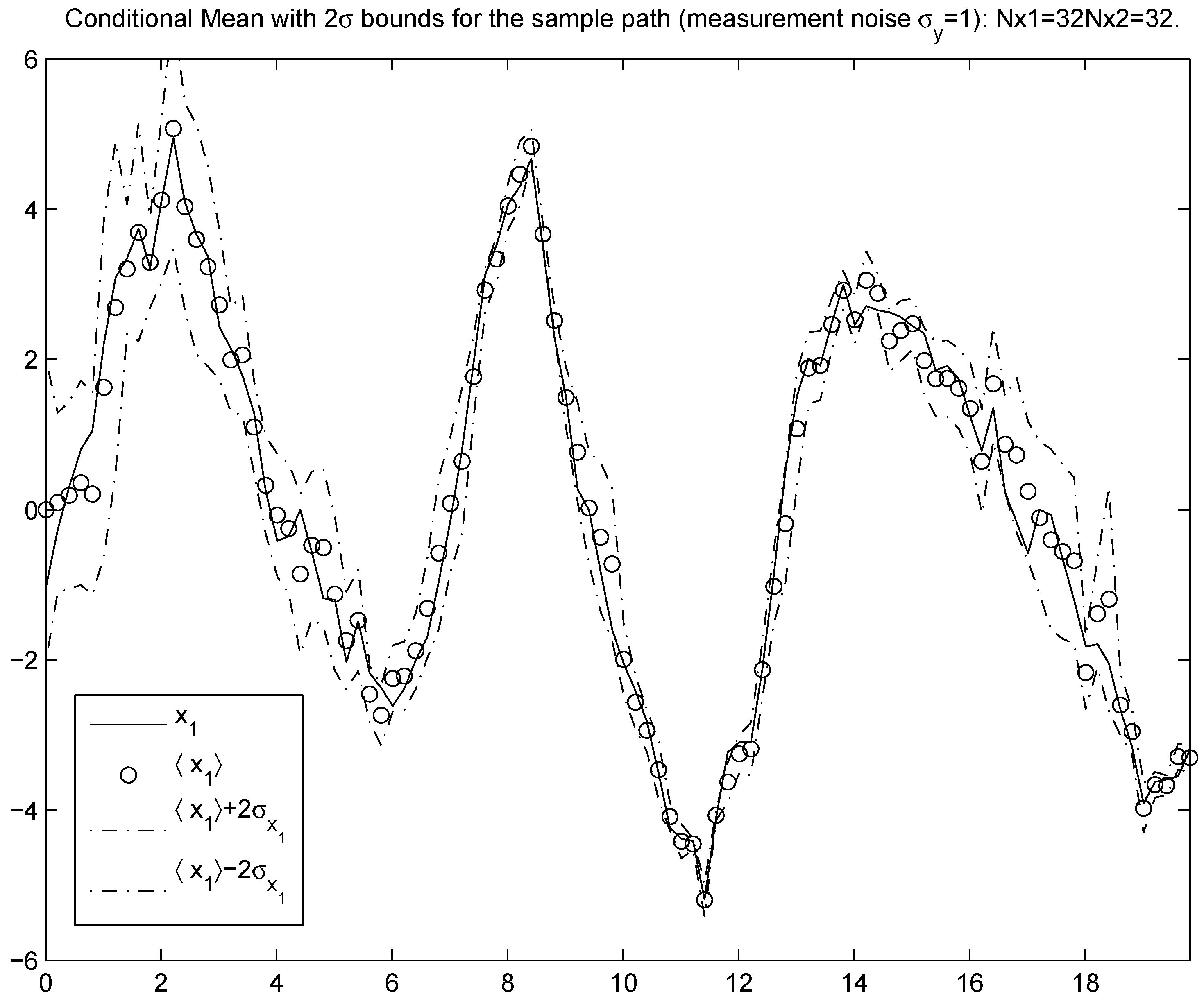
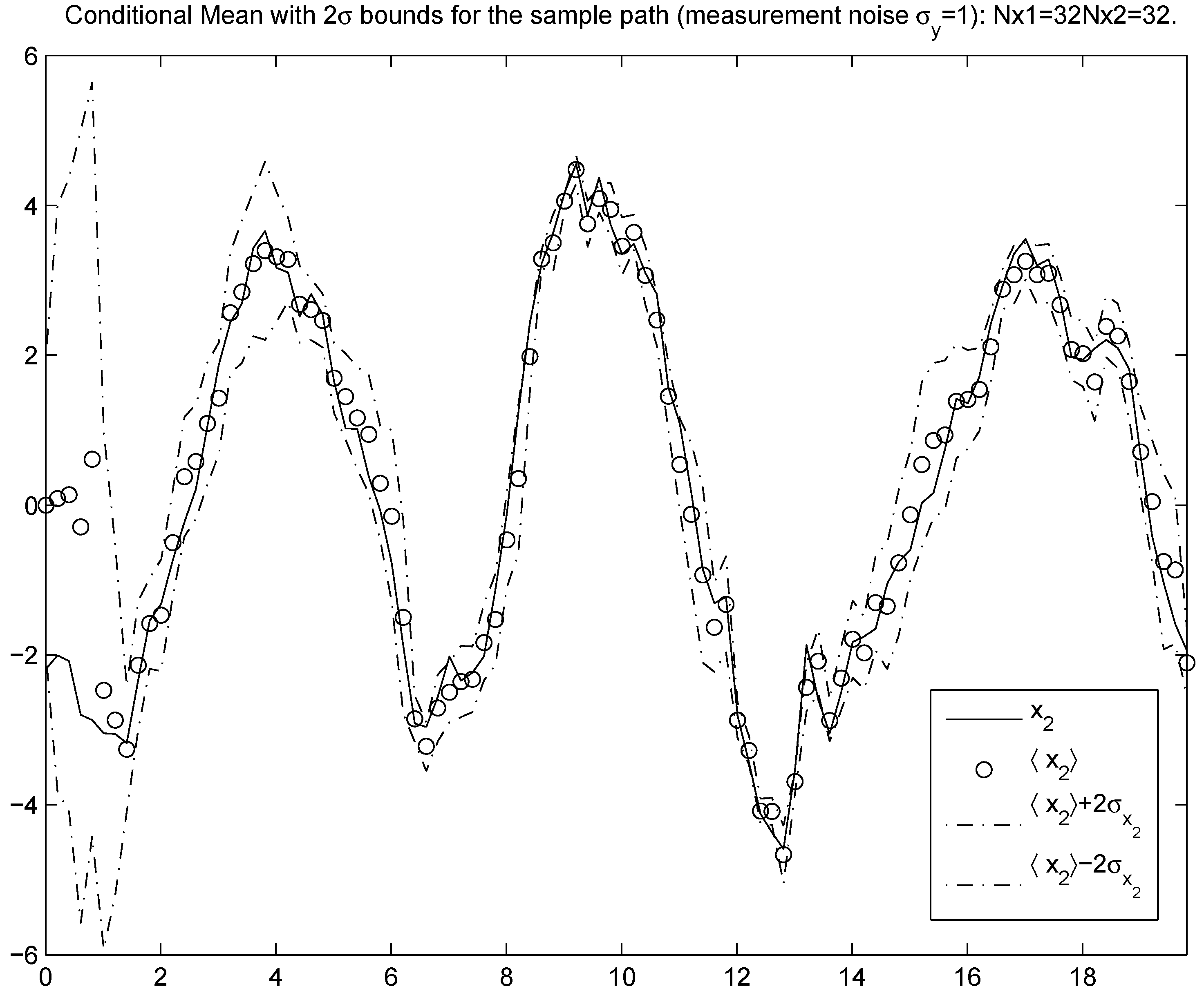
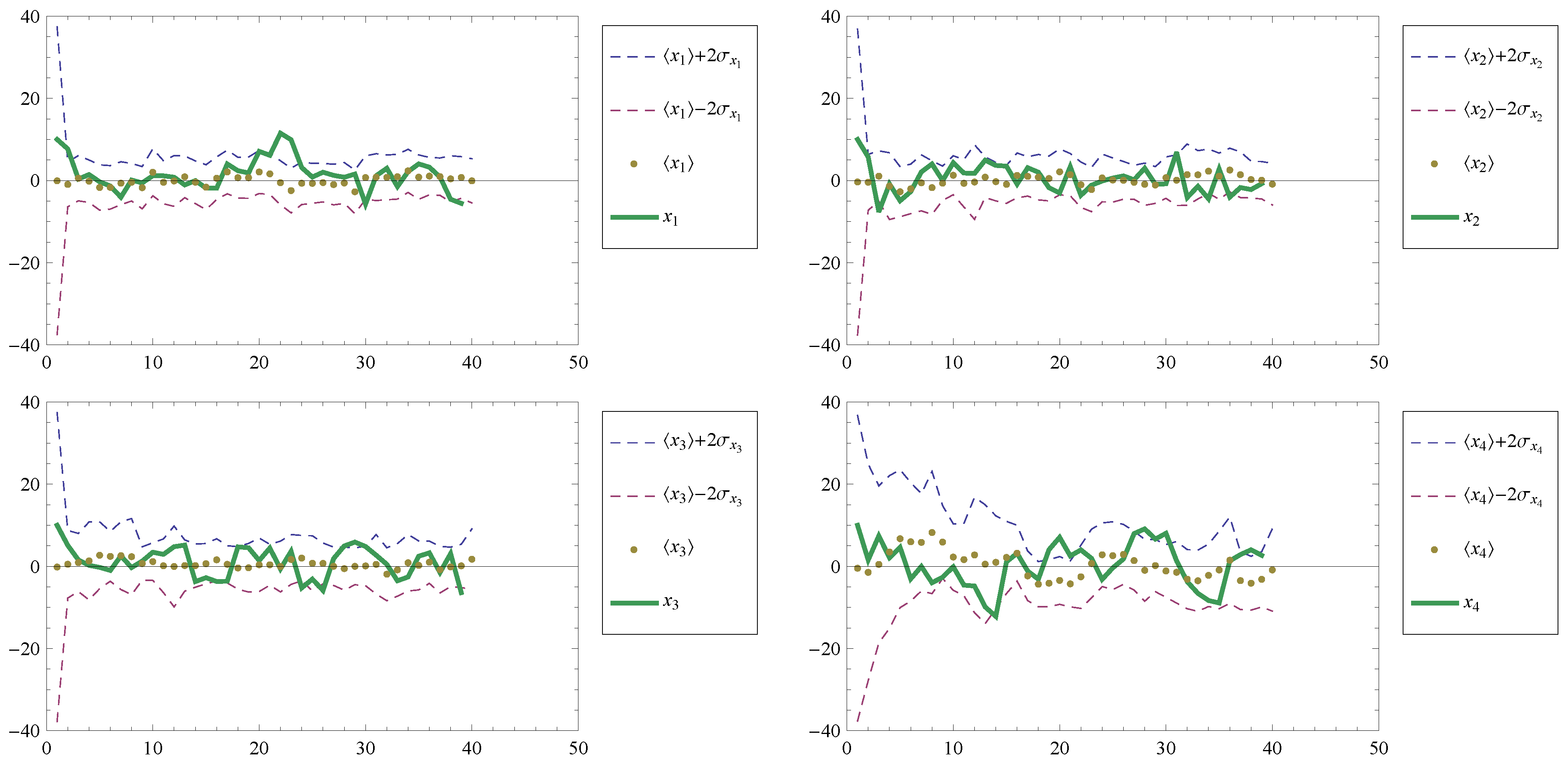
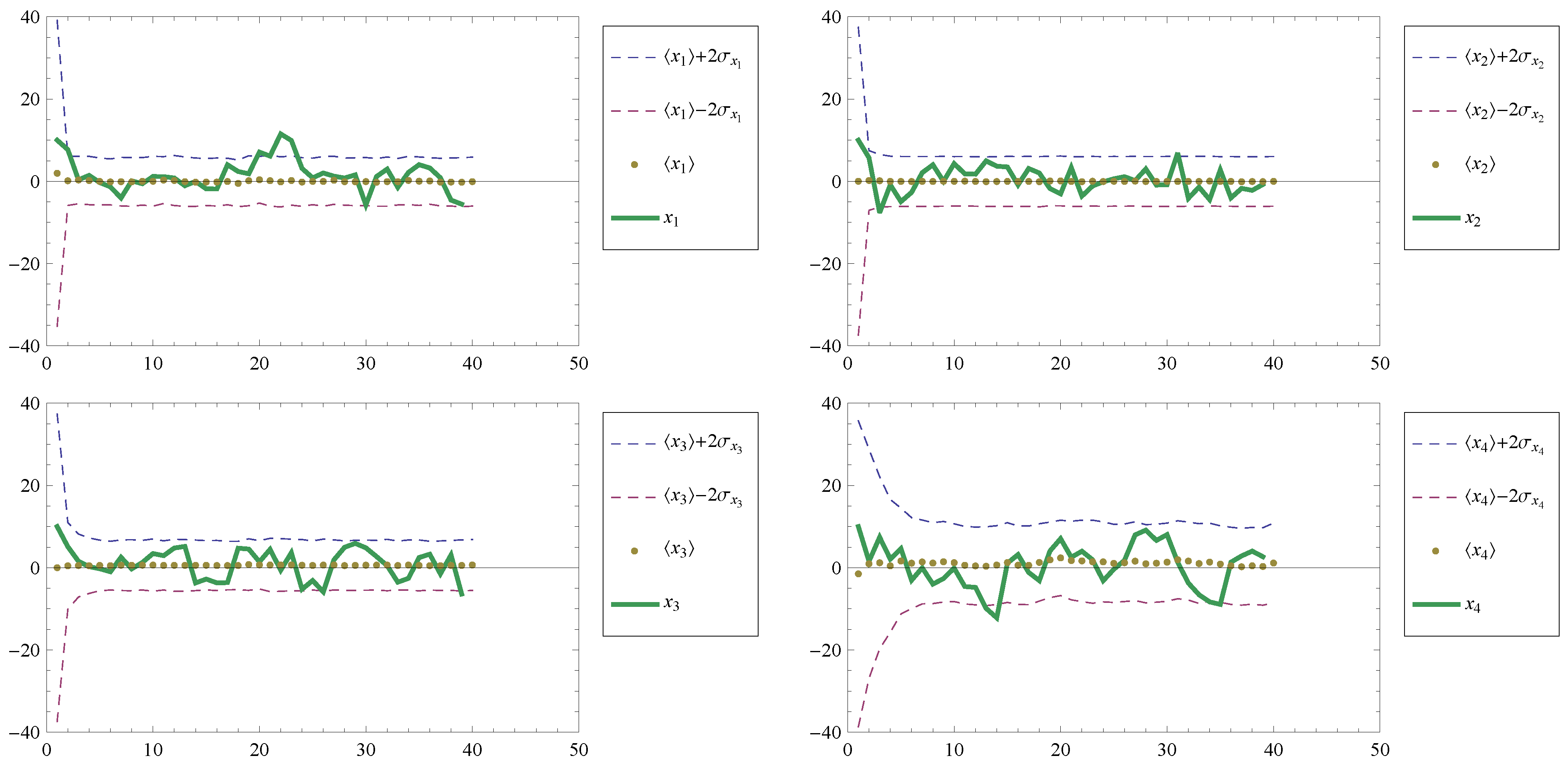
- In an accurate solution of the universal nonlinear filtering problem, the standard deviation computed from the conditional probability density is a reliable measure of the filter performance. This is not the case for suboptimal methods like the EKF, even when the state estimate is very good. In the examples studied, it was found that the conditional standard deviation did give a more reliable indication of the actual performance of the filter.
- The major source of computational savings follows from noting that the transition probability is given in terms of an exponential function. This implies that is non-negligible only in a very small region, or the transition probability density tensor is sparse. The sparsity property is crucial for storage and computation speed.
- In the examples studied, only the simplest one-step approximate formulae for the path integral expression were applied. There is a large body of work on the more accurate one-step formulae that could be used to get better results if the formulae used in this paper are not accurate enough (see, for instance, [11]) .
- Observe that higher accuracy (than the DF approximation) is attained by approximating the path integral with a finite-dimensional integral. The most efficient technique for evaluating such integrals would be to use Monte Carlo or quasi Monte Carlo methods. Another possibility is to use Monte Carlo based techniques for computing path integrals [24]. Observe that this is different from particle filtering.
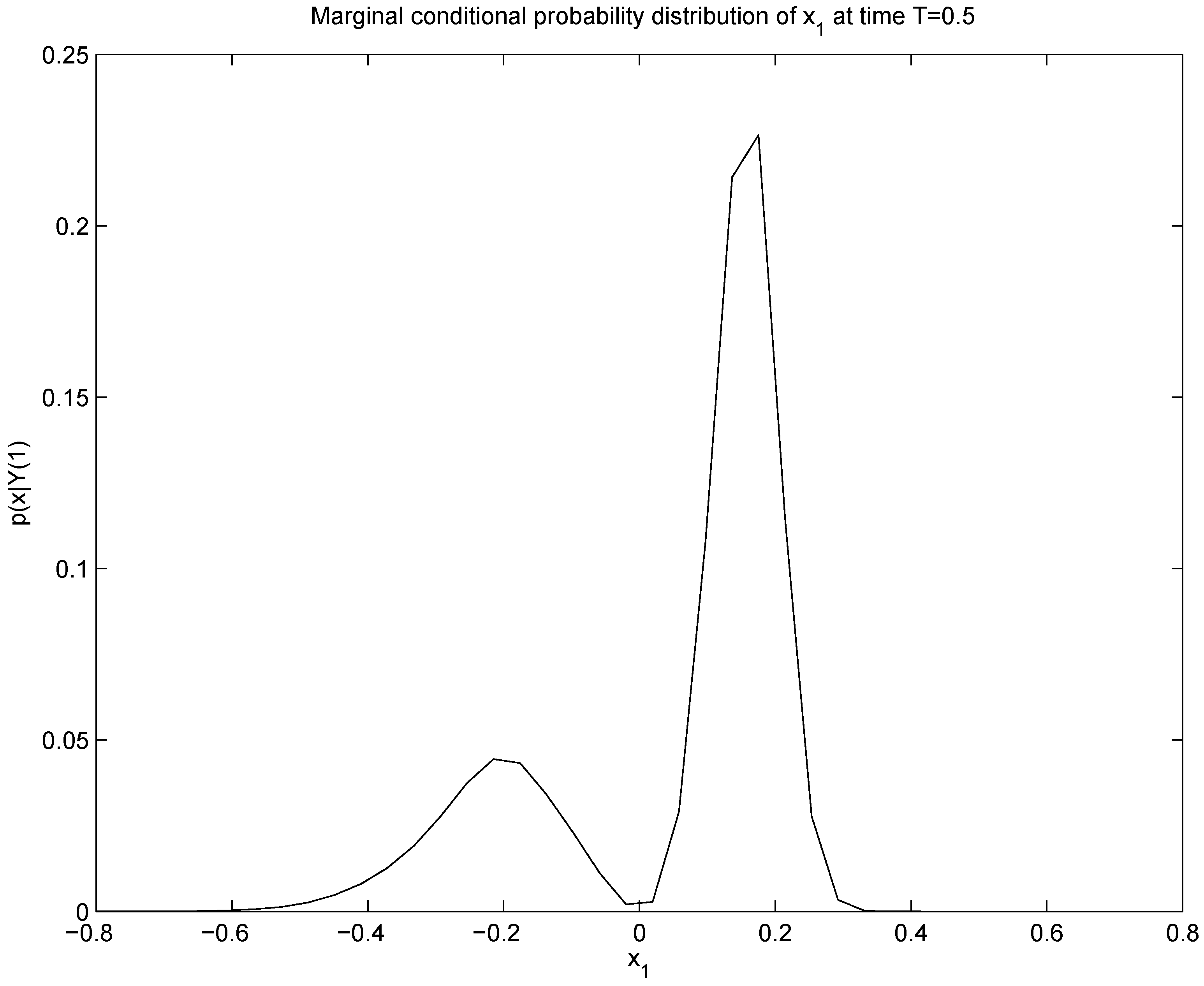
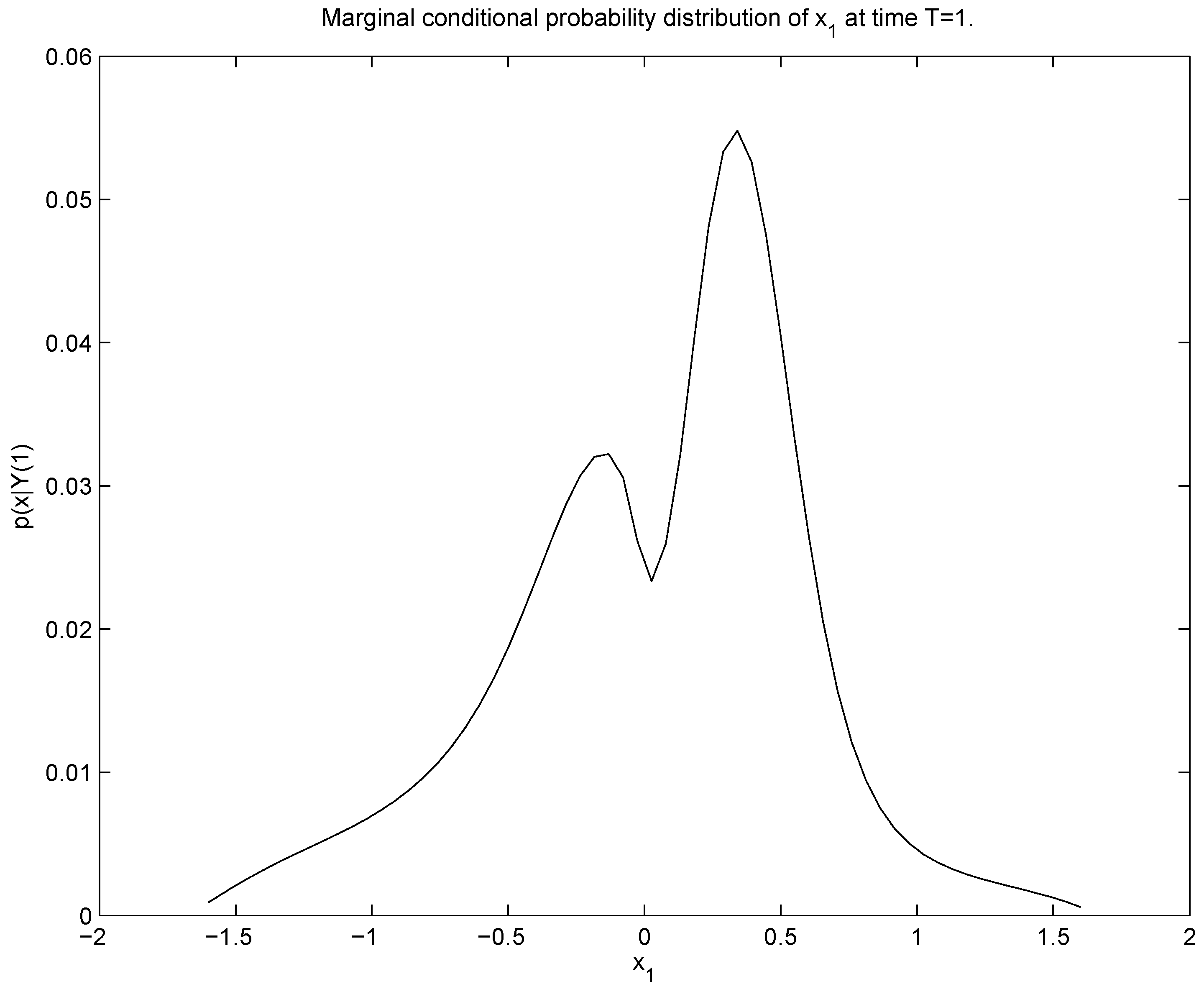
- Observe that even with coarse sampling, the computed conditional probability density is “smooth”. It seems apparent that a finer spatial grid spacing (with the same temporal grid spacing) will yield essentially the same result (using the DF approximation) at significantly higher computational cost. This was observed in the examples studied in this paper. Of course, a multiple time step approximation would be more accurate.
- In the example studied in Section 5.1., the grid spacing was larger than the noise. Since the grid must be able to sample the probability density, the effective noise vielbein was taken to be a constant (1 in our example) times the grid spacing, i.e., the signal model noise term is “inflated”. Of course, this means that the result is not as accurate as the solution that uses the smaller values for the noise. However, it may still lead to acceptable results (as in the first example) at significantly lower computational effort.
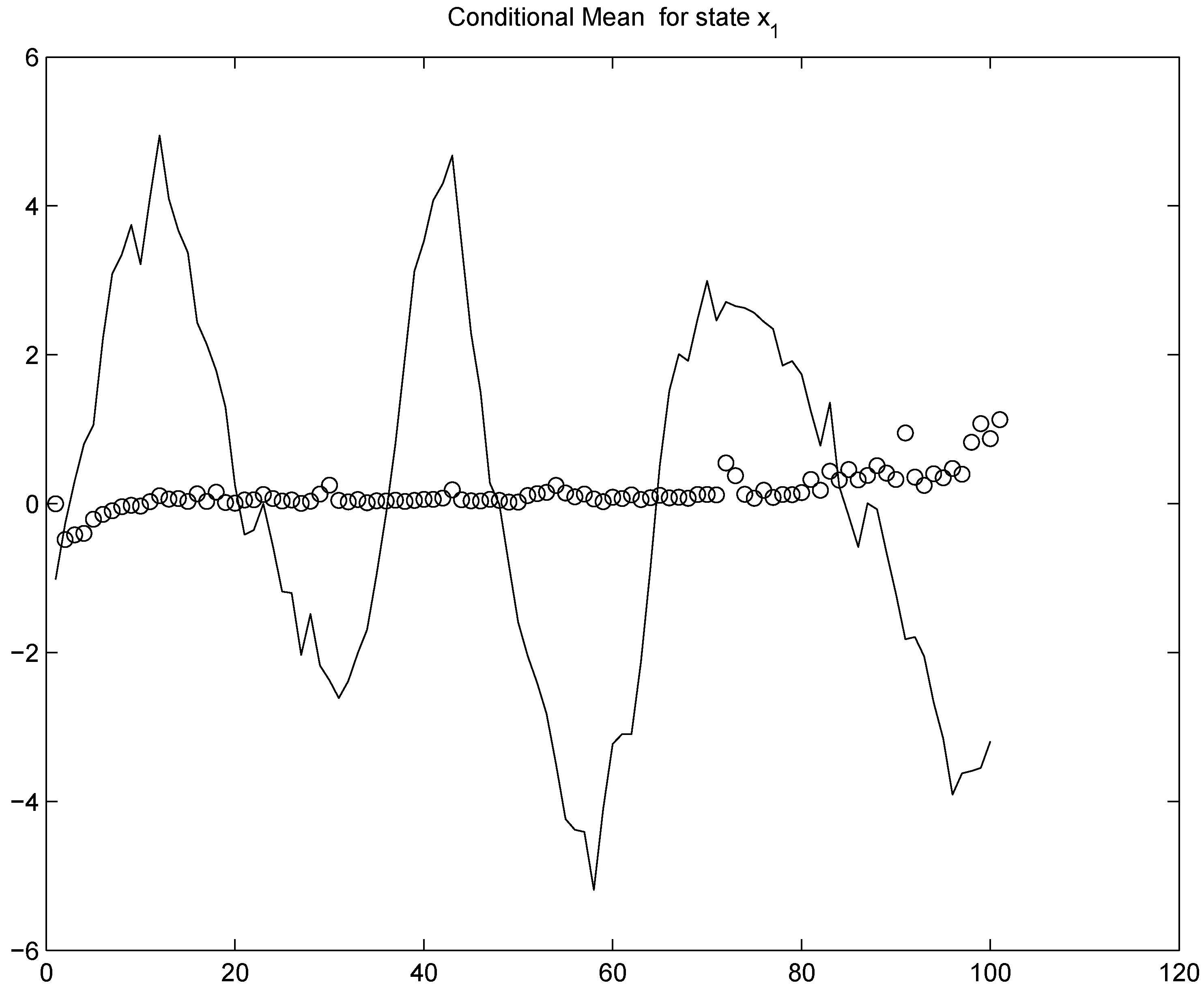
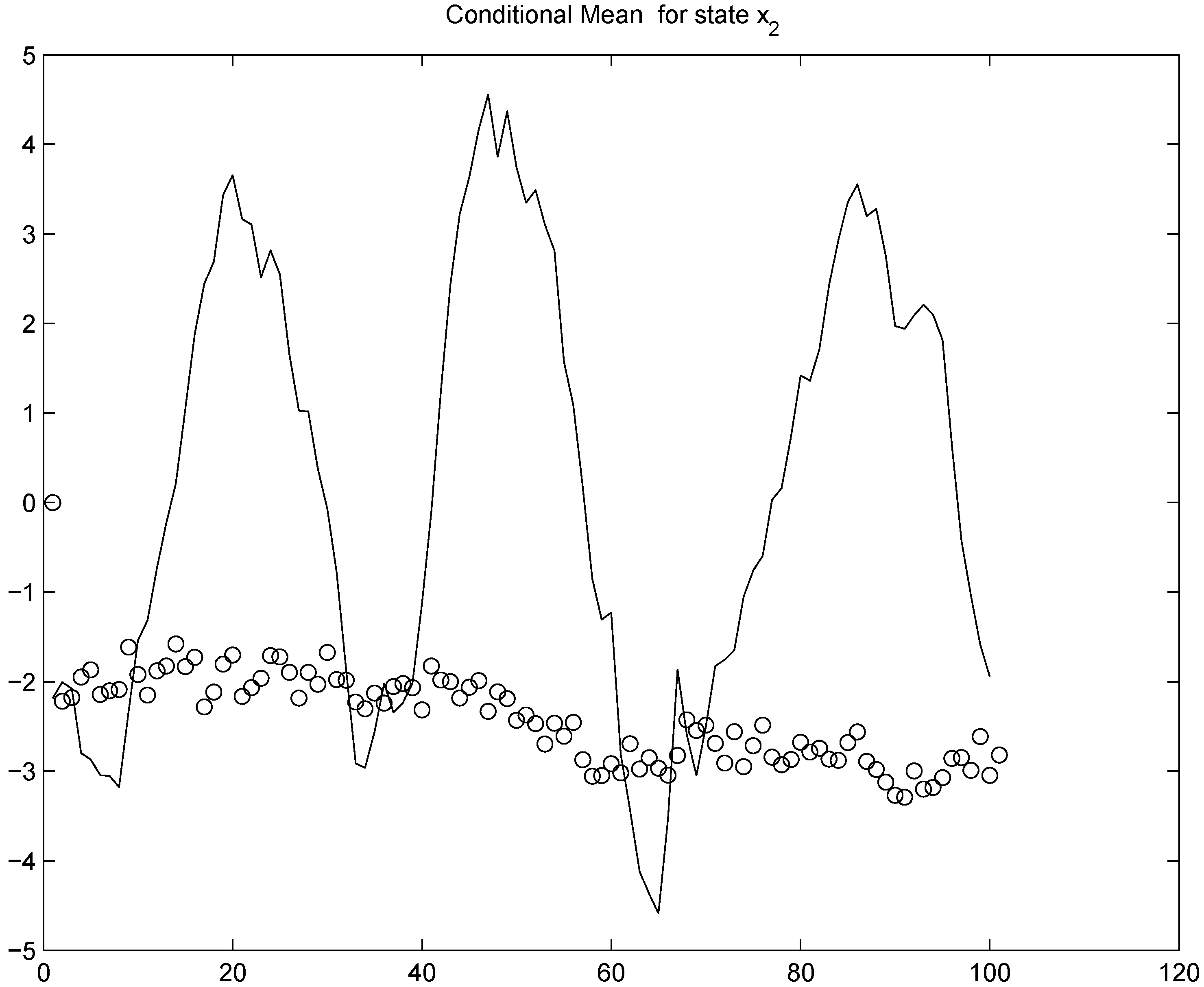
- Also note that the conditional mean estimation is quite good, i.e., of the order of the grid spacing, even for the coarser resolutions. This confirms the view that the conditional probability density calculated at grid points approximates very well the true value at those grid points (provided the computations are accurate). Alternatively, an interpolated version of the fundamental solution at coarser grid is close to the actual value. This suggests that a practical way of verifying the validity of the approximation is to note if the variation in the statistics with grid spacing, such as the conditional mean, is minimal.
- It is also noted that the PDE-based methods are considerably more complicated for general two- or higher-dimensional problems. Specifically, the non-diagonal diffusion matrix case is no harder to tackle using path integral methods than the diagonal case. This is in sharp contrast to the PDE approach which for higher-dimensional problems are typically based on operator splitting approaches. The operator splitting approaches are not reliable approximations in general.
- Observe that the one-step approximation of the path integral can be stored more compactly. Compact representation of the transition probability density, especially in the Itô case where it is of the Gaussian form. Even for the general case, the transition probability density from a certain initial point and given time step can be stored in terms of a few points with the rest obtainable via interpolation.
- Observe that the prediction step computation was sped up considerably by restricting calculation only in areas with significant conditional probability mass (or more accurately, in the union of the region of significant probability mass of and .
- It is noted that when the DF approximation is used with larger time steps, a coarser grid is more appropriate, which requires far fewer computations. Thus, a quasi-real-time implementation could use the coarse-grid approximation with larger time steps to identify local regions where the conditional pdf is significant so that a more accurate computation can then be carried out.
- When the step size is too large, the approximation will not be adequate. In fact, except for the case, the positivity of the action is not guaranteed. However, unlike some PDE discretization schemes, the degradation in performance is more graceful for the case. For instance, positivity is always maintained since the transition probability density is manifestly positive. It is also significant to note that in physics, path integral methods are used to compute quantities where and (see, for instance, [24]). This is not possible by simple discretization of the corresponding PDE due to time step restrictions (note that implicit schemes are not as accurate).
- For the multiplicative noise case, the choice of leads to a more complicated form of the Lagrangian. The accuracy of the one-step approximation depends on s in addition to r and will be model-dependent.
- Note that, unlike the result of S-T. Yau and Stephen Yau in [12], there is no rigorous bound on errors obtained for the Dirac-Feynman path integral formulae studied in the examples. It is known rigorously for a large class of problems that the continuum path integral formula converges to the correct solution [25].
- In some instances, the fundamental solution may be computed exactly. In particular, there exists an equivalence between nonlinear filtering and Euclidean quantum mechanics that may be exploited to arrive at the exact fundamental solution valid for arbitrary time step size [28]. In that case, the only approximation is the sparse grid integration.
6.2. Limitations
- The approximation for the correct path integral formula with the DF approximation, which is in fact the poorest possible approximation of the path integral;
- The replacement of the integrals in the prediction step by a summation;
- Approximation of the true infinite-dimensional pdf with a finite set of grid points.
6.3. Some Related Work
7. Conclusions
Acknowledgements
Appendix
A. Summary of Path Integral Formulas
A.1. Additive Noise
A.2. Multiplicative Noise
References
- Jazwinski, A.H. Stochastic Processes and Filtering Theory; Dover Publications: New York, NY, USA, 1970. [Google Scholar]
- Kalman, R.E. A new approach to linear filtering and prediction problems. Trans. ASME, J. Basic Eng. 1960, 82, 35–45. [Google Scholar]
- Kalman, R.E.; Bucy, R.S. New results in linear filtering and prediction problems. Trans. ASME, J. Basic Eng. 1961, 83, 95–108. [Google Scholar]
- Daum, F. Exact finite-dimensional nonlinear filters. Automatic Control, IEEE Transactions on 1986, 31, 616–622. [Google Scholar]
- Thomée, V. Handbook of Numerical Analysis. Ciarlet, P.G., Lions, J.L., Eds.; North Holland: Amsterdam, The Netherlands, 1990; Vol. 1, Chapter Finite difference methods for linear parabolic equations; pp. 5–196. [Google Scholar]
- Marchuk, G.I. Handbook of Numerical Analysis. Ciarlet, P.G., Lions, J.L., Eds.; North Holland: Amsterdam, The Netherlands, 1990; Vol. 1, Chapter Splitting and Alternating Direction Methods; pp. 197–462. [Google Scholar]
- Canuto, C.; Hussaini, M.Y.; Quarteroni, A.; Zang, T.A. Spectral Methods: Fundamentals in Single Domains; Springer-Verlag: Berlin, Germany, 2006. [Google Scholar]
- Thomée, V. Galerkin Finite Element Methods for Parabolic Problems; Vol. 25, Springer Series in Computational Mathematics; Springer-Verlag: Berlin, Germany, 1997. [Google Scholar]
- Feynman, R.P.; Hibbs, A.R. Quantum Mechanics and Path Integrals; McGraw-Hill Book Company: New York, NY, USA, 1965. [Google Scholar]
- Zinn-Justin, J. Quantum Field Theory and Critical Phenomena; International Series in Monographs on Physics; Oxford University Press: New York, NY, USA, 2002. [Google Scholar]
- Langouche, F.; Roekaerts, D.; Tirapegui, E. Functional Integration and Semiclassical Expansions; Reidel: Dordrecht, The Netherlands, 1982. [Google Scholar]
- Yau, S.T.; Yau, S.S.T. Explicit Solution of a Kolmogorov Equation. Appl. Math. Opt. 1996, 34, 231–266. [Google Scholar] [CrossRef]
- Balaji, B. Feynman Path Integrals and continuous-discrete filtering: The additive noise case. Technical Report TM 2008-343, 2009. [Google Scholar]
- Bader, B.W.; Kolda, T.G. Algorithm 862: MATLAB tensor classes for fast algorithm prototyping. ACM Trans. Math. Software 2006, 32, 635–653. [Google Scholar] [CrossRef]
- Bader, B.W.; Kolda, T.G. Efficient MATLAB computations with sparse and factored tensors. Technical Report SAND2006-7592, 2006. [Google Scholar]
- Gordon, N.; Salmond, D.; Smith, A. Novel approach to nonlinear/non-Gaussian Bayesian state estimation. IEE Proc.-F Rad. Sig. Proc. 1993, 140, 107–113. [Google Scholar] [CrossRef]
- Budhiraja, A.; Chen, L.; Lee, C. A survey of numerical methods for nonlinear filtering problems. Physica D 2007, 230, 27–36. [Google Scholar] [CrossRef]
- Chen, L.; Lee, C.; Bidhiraja, A.; Mehra, R.K. PFLib —An object oriented MATLAB toolbox for particle filtering. In Proceedings to SPIE Signal Processing, Sensor Fusion, and Target Recognition XVI, 2007; Vol. 6567.
- Lototsky, S.V.; Rozovskii, B.L. Recursive nonlinear filter for a continuous discrete-time model:separation of parameters and observations. IEEE Transactions on Automatic Control 1998, 43, 1154–1158. [Google Scholar] [CrossRef]
- Crisan, D.; Doucet, A. A survey of convergence results on particle filtering methods for practitioners. Signal Processing, IEEE Transactions on [see also Acoustics, Speech, and Signal Processing, IEEE Transactions on] 2002, 50, 736–746. [Google Scholar] [CrossRef]
- Daum, F.; Huang, J. Curse of dimensionality and particle filters. In IEEE Aerospace Conference, 2003; Vol. 4.
- Balaji, B. Sparse Tensors and Discrete-Time nonlinear filtering. In IEEE Radar Conference, 2008; pp. 1785–1790.
- Balaji, B. Continuous-Discrete Filtering using the Dirac-Feynman Algorithm. In IEEE Radar Conference, Rome, Italy, 2008.
- Montváy, I.; Münster, G. Quantum Fields on a Lattice; Cambridge Monographs on Mathematical Physics; Cambridge University Press: New York, USA, 1997. [Google Scholar]
- Alicki, R.; Makoviec, D. Functional integrals for parabolic differential equations. J. Phys. A:Math. Gen. 1985, 18, 3319–3325. [Google Scholar] [CrossRef]
- Balaji, B. Universal Nonlinear Filtering Using Path Integrals II: The Continuous-Continuous Model with Additive Noise. PMC Physics A 2009. [Google Scholar] [CrossRef]
- Balaji, B. Estimation of indirectly observable Langevin states: path integral solution using statistical physics methods. J. Stat. Mech.-Theory Exp. 2008, 2008, P01014:1–P01014:17. [Google Scholar] [CrossRef]
- Balaji, B. Euclidean Quantum Mechanics and Universal Nonlinear Filtering. Entropy 2009, 11, 42–58. [Google Scholar] [CrossRef]
- Whittle, P. Likelihood and Cost as Path Integrals. J. Roy. Stat. Soc. Ser. B 1991, 53, 505–538. [Google Scholar]
- Archambeau, C.; Cornford, D.; Lawrence, D.; Schwaighofer, A.; Quinonero, J. Gaussian process approximations of stochastic differential equations. In Journal of Machine Learning Research Workshop and Conference Proceedings; 2007. [Google Scholar]
- Friston, K. Variational filtering. NeuroImage 2008, 41, 747–766. [Google Scholar] [CrossRef] [PubMed]
- Friston, K.; Mattout, J.; Trujillo-Barreto, N.; Ashburner, J.; Penny, W. Variational free energy and the Laplace approximation. NeuroImage 2007, 34, 220–234. [Google Scholar] [CrossRef] [PubMed]
- Friston, K.; Trujillo-Barreto, N.; Daunizeau, J. DEM: A variational treatment of dynamic systems. NeuroImage 2008, 41, 849–885. [Google Scholar] [CrossRef] [PubMed]
- Alexander, F.J.; Eynik, G.L.; Restrepo, J.M. Accelerated Monte Carlo for Optimal Estimation of Time Series. J. Statist. Phys. 2005, 119, 1331–1345. [Google Scholar] [CrossRef]
- Restrepo, J.M. A path integral method for data assimilation. Physica D 2008, 237, 14–27. [Google Scholar] [CrossRef]
© 2009 by the author; licensee Molecular Diversity Preservation International, Basel, Switzerland. This article is an open-access article distributed under the terms and conditions of the Creative Commons Attribution license http://creativecommons.org/licenses/by/3.0/.
Share and Cite
Balaji, B. Continuous-Discrete Path Integral Filtering. Entropy 2009, 11, 402-430. https://doi.org/10.3390/e110300402
Balaji B. Continuous-Discrete Path Integral Filtering. Entropy. 2009; 11(3):402-430. https://doi.org/10.3390/e110300402
Chicago/Turabian StyleBalaji, Bhashyam. 2009. "Continuous-Discrete Path Integral Filtering" Entropy 11, no. 3: 402-430. https://doi.org/10.3390/e110300402
APA StyleBalaji, B. (2009). Continuous-Discrete Path Integral Filtering. Entropy, 11(3), 402-430. https://doi.org/10.3390/e110300402