
Constant Slope Maps and the Vere-Jones Classification

Abstract
:
1. Introduction
2. : The Class of Countably Piecewise Monotone Markov Maps
- Two elements of have pairwise disjoint interiors, and is at most countable.
- The partition is finite or countably-infinite;
- is monotone for each (classical Markov partition) or piecewise monotone for each ; in the latter case, we will speak of a slack Markov partition.
- For every and every maximal interval of monotonicity of T, if , then .
- T is topologically mixing, i.e., for every open sets , there is an n, such that for all .
- T admits a countably-infinite Markov partition.
- .
- (i)
- For each and , the entry of is finite.
- (ii)
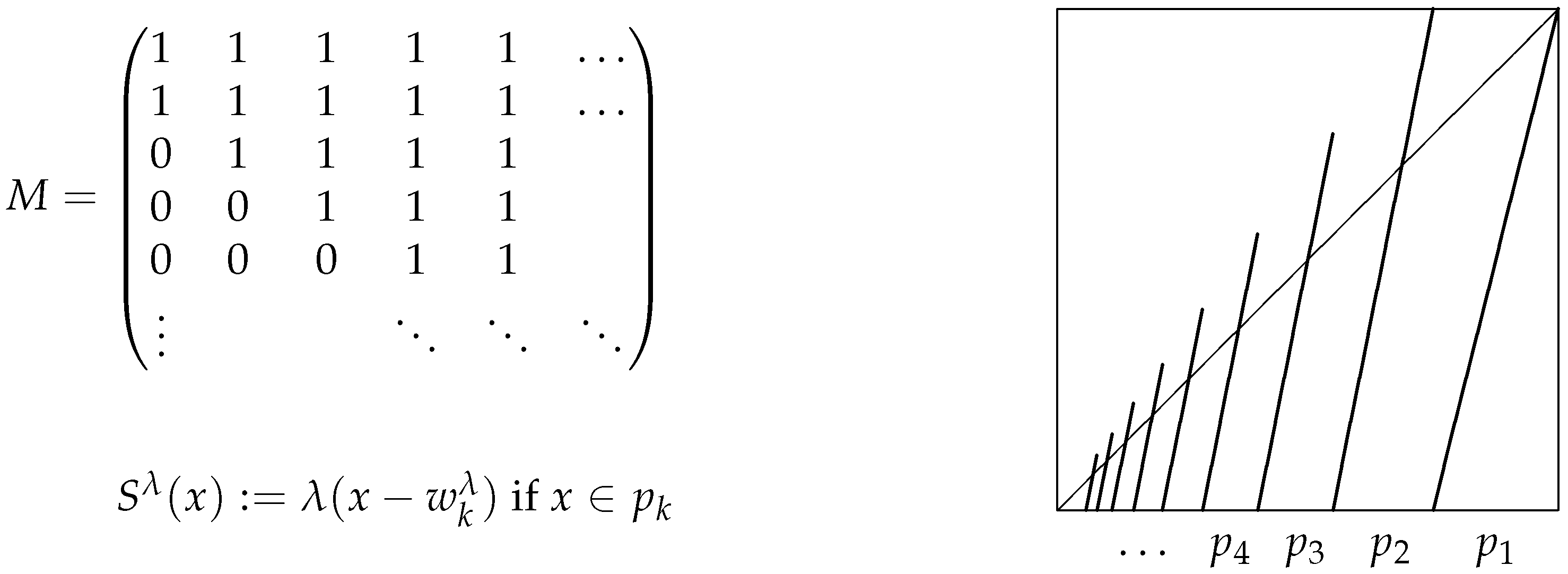
- The entry if and only if there are exactly m subintervals , …, of i with pairwise disjoint interiors, such that , .
3. Conjugacy of a Map from to a Map of Constant Slope
- (i)
- For some , the map T is conjugate via a continuous increasing onto map to some map .
- (ii)
- For some classical Markov partition for T, there is a positive summable λ-solution of Equation (5).
- (iii)
- For every classical Markov partition for T, there is a positive summable λ-solution of Equation (5).
- (iv)
- For every slack Markov partition for T, there is a positive summable λ-solution of Equation (5).
- (v)
- For some slack Markov partition for T, there is a positive summable λ-solution of Equation (5).
4. The Vere-Jones Classification
- irreducible, if for each pair of indices , there exists a positive integer n, such that , and
- aperiodic, if for each index , the value .
- (i)
- Let be a nonnegative irreducible aperiodic matrix indexed by a countable index set . There exists a common value , such that for each :
- (ii)
- For any value and all :
- the series are either all convergent or all divergent;
- as , either all or none of the sequences tend to zero.
4.1. Entropy, Generating Functions and the Vere-Jones Classes
- equals the number of paths of length n connecting i to j.
- The first entrance to j: equals the number of paths of length n connecting i to j, without the appearance of j in between.
- The last exit of i: equals the number of paths of length n connecting i to j, without the appearance of i in between.
- The first entrance to : for a nonempty and , equals the number of paths of length n connecting i to j, without the appearance of any element of in between.
- (i)
- If there is a vertex j, such that then, there exists a strongly-connected subgraph , such that .
- (ii)
- If there is a vertex j, such that , then for all proper strongly-connected subgraphs , one has .
- (iii)
- If there is a vertex j, such that , then for all i.
- I.
- If ,
- II.
- Assume that . Then, by our assumption and Equation (11):
4.1.1. Salama’s Criteria
4.1.2. Further Useful Facts
- (a)
- and M is recurrent or
- (b)
- when either or and M is transient, there is an infinite sequence of indices , such that ():
4.1.3. Useful Matrix Operations in the Vere-Jones Classes
- (i)
- ,
- (ii)
- if for each i, except for a finite set of j values, the matrix N belongs to the same class of the Vere-Jones classification as the matrix M.
- (i)
- Since if and only if , Property (i) follows from Corollary 1.
- (ii)
- By our assumption, for each i, , except for a finite set of j values, so Theorem 6 and Corollary 1 can be applied. Notice that for any nonnegative v,so by Theorem 5, the matrix M is transient, resp. recurrent, if and only if is transient, resp. recurrent. In order to distinguish different recurrent cases, we will use Table 1. Since by (i) , we can write:
5. Entropy and the Vere-Jones Classification in
6. Linearizability
- (i)
- Since T is leo, for a fixed element i of , there is an , such that . Then, by Proposition 3 (ii), for each . This implies that any λ-solution of Equation (5) satisfies:so .
- (ii)
- We assume that T is topologically mixing; see Definition 3. For any fixed element , there is an , such that : since T is topologically mixing, there exist positive integers and , such that for every , resp. for every . This implies that the interval contains whenever ; fix one such n. Then, for any element j of , such that ; hence:for any λ-solution of Equation (5).
6.1. Window Perturbation
6.1.1. Local Window Perturbation
- T equals S on
- there is a nontrivial partition of j, such that and is monotone for each i.
- (i)
- If S is recurrent, then T is strongly recurrent and .
- (ii)
- If S is transient, then T is strongly recurrent for each sufficiently large k.
- (i)
- (ii)
6.1.2. Global Window Perturbation
7. Examples
7.1. Non-Leo Maps in the Vere-Jones Classes
- (a)
- For any choice of ,so that .
- (b)
- If , then and M is transient. There is a summable -solution for M if and only if .
- (c)
- If , then and M is null recurrent. There is a summable -solution for M if and only if .
- (d)
- If , then , and M is strongly recurrent. There is a summable -solution for M if and only if .
- (i)
- The matrix is a transition matrix of a strongly recurrent non-leo map if and only if . The map T is not linearizable for .
- (ii)
- The matrix is a transition matrix of a transient non-leo map . The map T is linearizable if .
7.2. Leo Maps in the Vere-Jones Classes
7.2.1. Perturbations of the Full Tent Map of the Operator Type
- the window perturbation on is of order (i.e., if we do not perturb S on ).
- Strongly recurrent: First of all, consider the set and the choice:Then, by (48), for and for each , hence:
- Transient: Denoting , let us define:
7.2.2. One More Collection of Perturbations of the Full Tent Map
7.2.3. Transient Non-Operator Example from [23]
7.2.4. Transient Non-Operator Example from [5]
- (a)
- , , , ,
- (b)
- , , ,
- (c)
- for each interval ,
- (d)
- and for each .
- is a conjugacy class of maps in .
- The common topological entropy equals .
- Equation (5) has a positive summable λ-solution for each .
7.3. One Application of Our Results
- (i)
- , Propositions 8 and 13.
- (ii)
- (iii)
- T is not conjugate to a map of constant slope (is not linearizable), Proposition 13.
- (iv)
- T is null recurrent, Proposition 13.
- (v)
- Let be a Markov partition for T; denote the transition matrix of T with respect to representing a bounded linear operator on . Since:we have ; see (i), Section 2 and Proposition 8. Then, by Theorem 11, any recurrent centralized (operator/non-operator) perturbation of T is linearizable. In particular, it is true for any local window perturbation of T on some element of , Proposition 11(i).
- (vi)
- Let be a Markov partition for T, which equals outside of some interval . Let be a local window perturbation of T on some element of ; from the previous Paragraph (v), it follows that is strongly recurrent and linearizable. Consider a centralized (operator/non-operator) perturbation of on some . Then, if is recurrent, it is linearizable by Theorem 10. Otherwise, we can use either Theorem 8 (an operator case) or Theorem 9 (non-operator case; is finite for ) to show that a local window perturbation of of a sufficiently large order is linearizable.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Milnor, J.; Thurston, W. On iterated maps of the interval. In Dynamical Systems, Lecture Notes in Math; Springer: Berlin/Heidelberg, Germany, 1988; Volume 1342, pp. 465–563. [Google Scholar]
- Parry, W. Symbolic dynamics and transformations of the unit interval. Trans. Am. Math. Soc. 1966, 122, 368–378. [Google Scholar] [CrossRef]
- Misiurewicz, M.; Szlenk, W. Entropy of piecewise monotone mappings. Stud. Math. 1988, 67, 45–63. [Google Scholar]
- Misiurewicz, M.; Raith, P. Strict inequalities for the entropy of transitive piecewise monotone maps. Discret. Contin. Dyn. Syst. 2005, 13, 451–468. [Google Scholar]
- Bobok, J.; Soukenka, M. On piecewise affine interval maps with countably many laps. Discret. Contin. Dyn. Syst. 2011, 31, 753–762. [Google Scholar] [CrossRef]
- Katok, A.; Hasselblatt, B. Introduction to the Modern Theory of Dynamical Systems; Cambridge University Press: Cambridge, UK, 1995. [Google Scholar]
- Vere-Jones, D. Ergodic properties of non-negative matrices. I. Pac. J. Math. 1967, 22, 361–385. [Google Scholar] [CrossRef]
- Ruette, S. On the Vere-Jones classification and existence of maximal measures for countable topological Markov chains. Pac. J. Math. 2003, 209, 366–380. [Google Scholar] [CrossRef]
- Bobok, J. Semiconjugacy to a map of a constant slope. Stud. Math. 2012, 208, 213–228. [Google Scholar] [CrossRef]
- Alsedá, L.; Llibre, J.; Misiurewicz, M. Combinatorial Dynamics and the Entropy in Dimension One, 2nd ed.; World Scientific: Singapore, Singapore, 2000. [Google Scholar]
- Misiurewicz, M.; Roth, S. Constant slope maps on the extended real line. 2016; arXiv:1603.04198. [Google Scholar]
- Walters, P. An Introduction to Ergodic Theory; Springer: Berlin/Heidelberg, Germany, 1982. [Google Scholar]
- Gurevič, B.M. Topological entropy for denumerable Markov chains. Soviet Math. Dokl. 1969, 10, 911–915. [Google Scholar]
- Salama, I. Topological entropy and recurrence of countable chains. Pac. J. Math. 1988, 134, 325–341. [Google Scholar] [CrossRef]
- Pruitt, W.E. Eigenvalues of non-negative matrices. Ann. Math. Stat. 1964, 35, 1797–1800. [Google Scholar] [CrossRef]
- Chung, K.L. Markov Chains with Stationary Transition Probabilities; Springer: Berlin/Heidelberg, Germany, 1960. [Google Scholar]
- Misiurewicz, M. Horseshoes for mappings of an interval. Bull. Acad. Pol. Sci. 1979, 27, 167–169. [Google Scholar]
- Bobok, J. Strictly ergodic patterns and entropy for interval maps. Acta Math. Univ. Comen. 2003, 72, 111–118. [Google Scholar]
- Taylor, A.E.; Lay, D.C. Introduction to Fuctional Analysis, 2nd ed.; Robert, E., Ed.; Krieger Publishing Company: Malabar, FL, USA, 1980. [Google Scholar]
- Misiurewicz, M.; Roth, S. No semiconjugacy to a map of constant slope. Ergod. Theory Dyn. Syst. 2016, 36, 875–889. [Google Scholar] [CrossRef]
- Block, L.; Guckenheimer, J.; Misiurewicz, M.; Young, L.-S. Periodic points and topological entropy of one-dimensional maps. In Global Theory of Dynamical Systems; Springer: Berlin/Heidelberg, Germany, 1980; Volume 819, pp. 18–34. [Google Scholar]
- Brucks, K.; Bruin, H. Topics from One-Dimensional Dynamics (London Mathematical Society Student Texts); Cambridge University Press: Cambridge, UK, 2004; Volume 62. [Google Scholar]
- Bruin, H.; Todd, M. Transience and thermodynamic formalism for infinitely branched interval maps. J. Lond. Math. Soc. 2012, 86, 171–194. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Transient | Null Recurrent | Weakly Recurrent | Strongly Recurrent | |
|---|---|---|---|---|
| ∞ | ||||
| for all i |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bobok, J.; Bruin, H. Constant Slope Maps and the Vere-Jones Classification. Entropy 2016, 18, 234. https://doi.org/10.3390/e18060234
Bobok J, Bruin H. Constant Slope Maps and the Vere-Jones Classification. Entropy. 2016; 18(6):234. https://doi.org/10.3390/e18060234
Chicago/Turabian StyleBobok, Jozef, and Henk Bruin. 2016. "Constant Slope Maps and the Vere-Jones Classification" Entropy 18, no. 6: 234. https://doi.org/10.3390/e18060234
APA StyleBobok, J., & Bruin, H. (2016). Constant Slope Maps and the Vere-Jones Classification. Entropy, 18(6), 234. https://doi.org/10.3390/e18060234