The Application of Dual-Tree Complex Wavelet Transform (DTCWT) Energy Entropy in Misalignment Fault Diagnosis of Doubly-Fed Wind Turbine (DFWT)

Abstract
:1. Introduction
2. The Related Theories
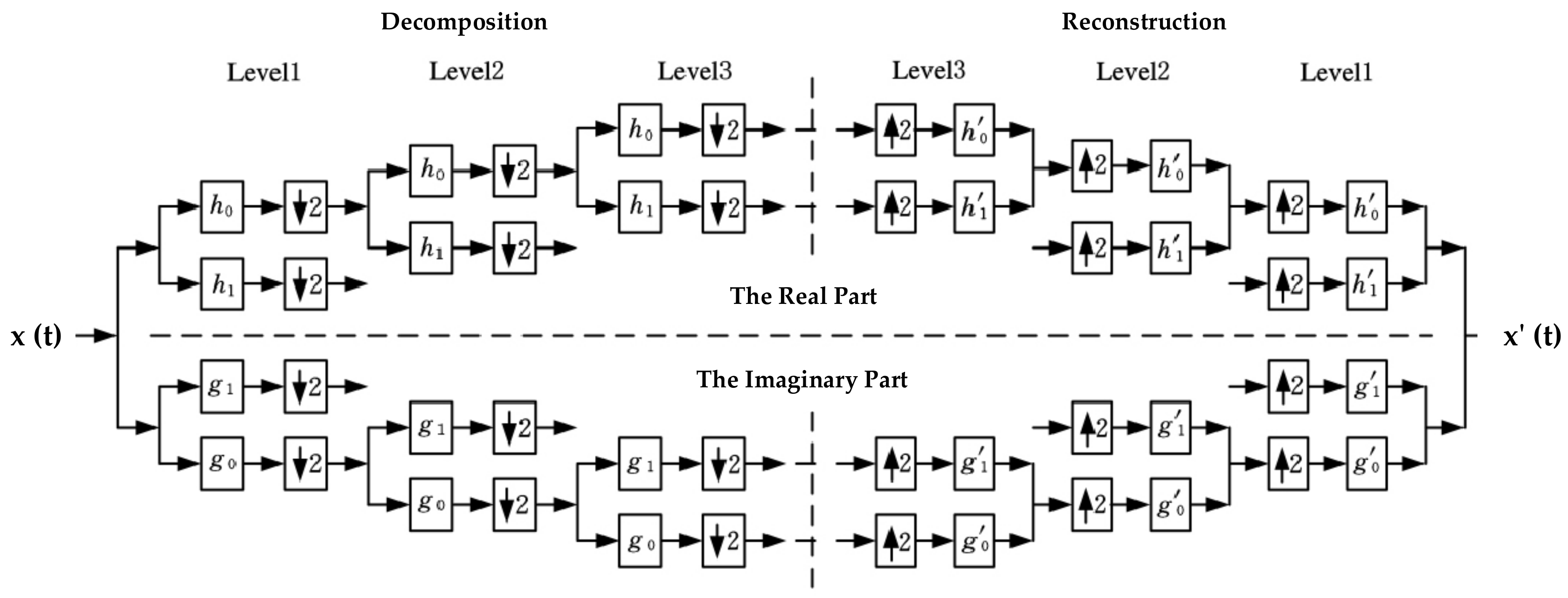
2.1. Dual-Tree Complex Wavelet Transform
2.2. The Principles of SVM
2.3. Particle Swarm Optimization
3. The Establishment of DFWT Model
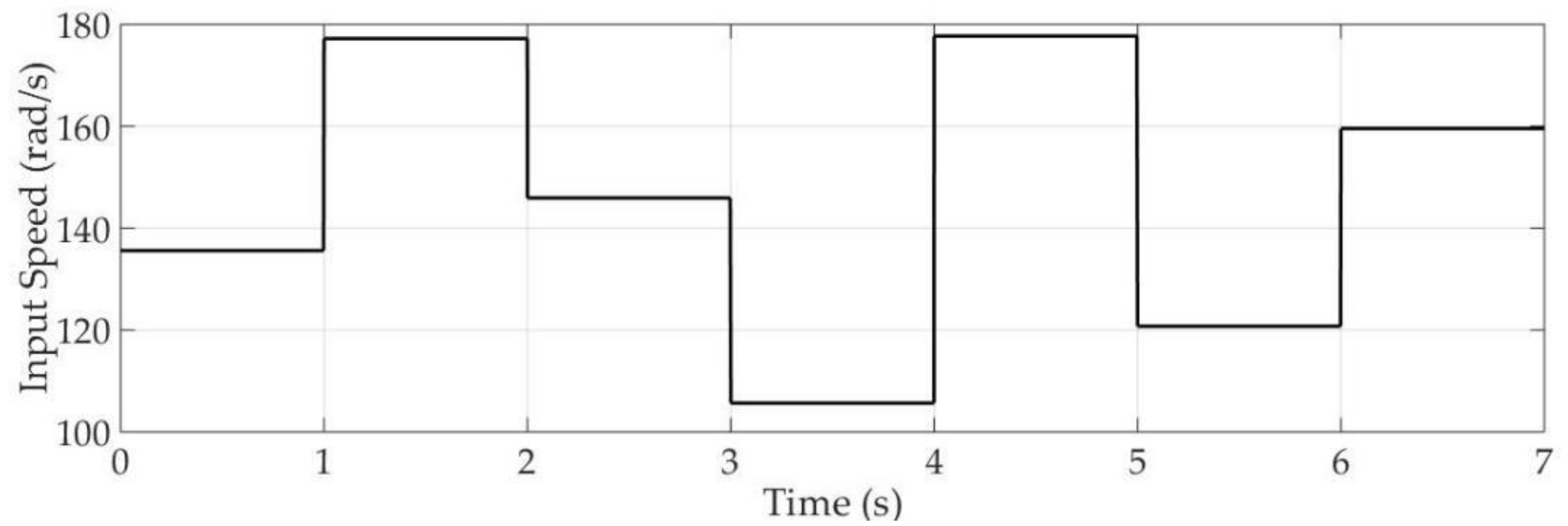
3.1. Transmission System Modeling by ADAMS
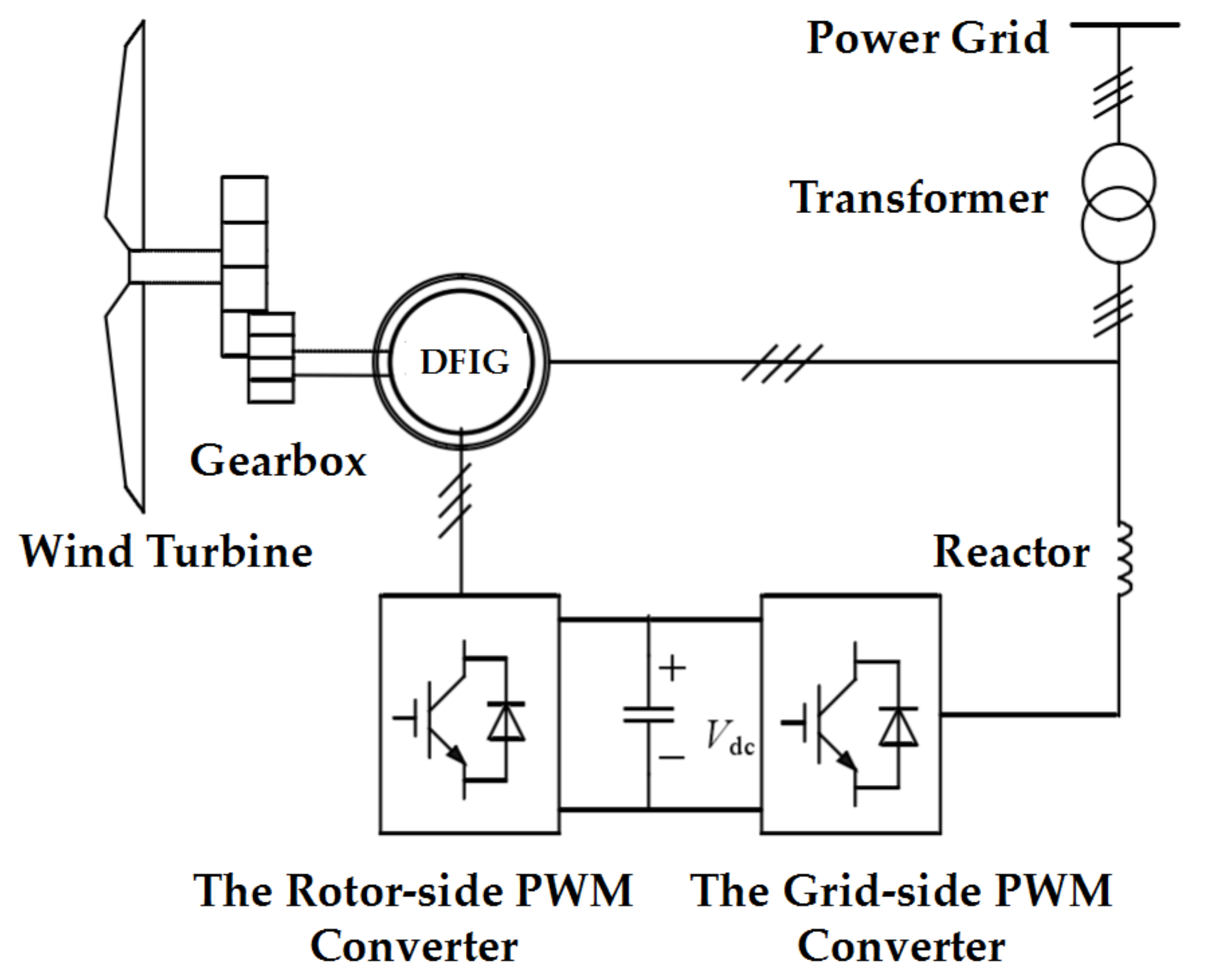
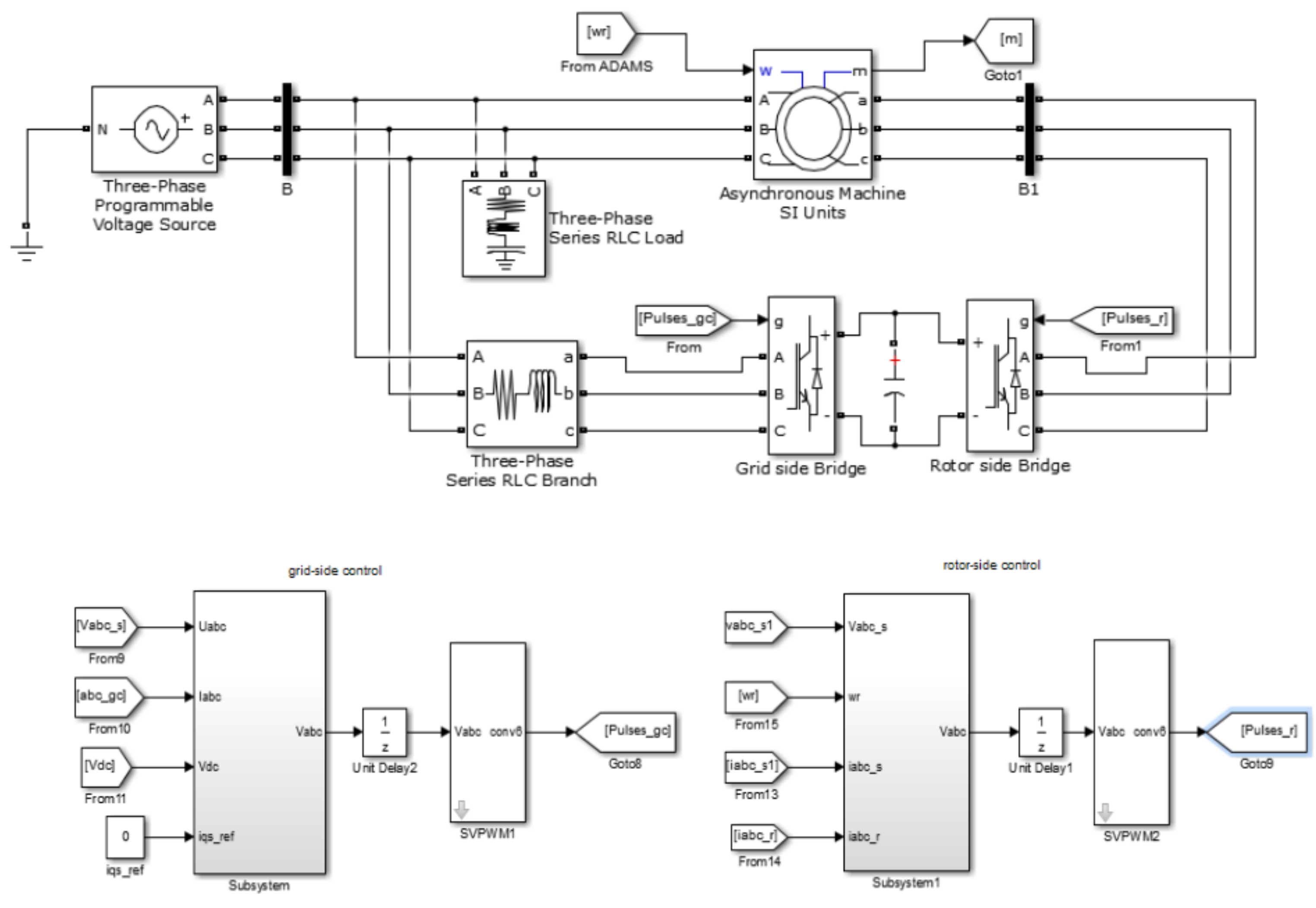
3.2. Doubly-Fed Generator and Its Control System Modeling by MATLAB
3.2.1. Mathematical Model of Doubly-Fed Induction Generator (DFIG)
3.2.2. Double-PWM Control Strategy
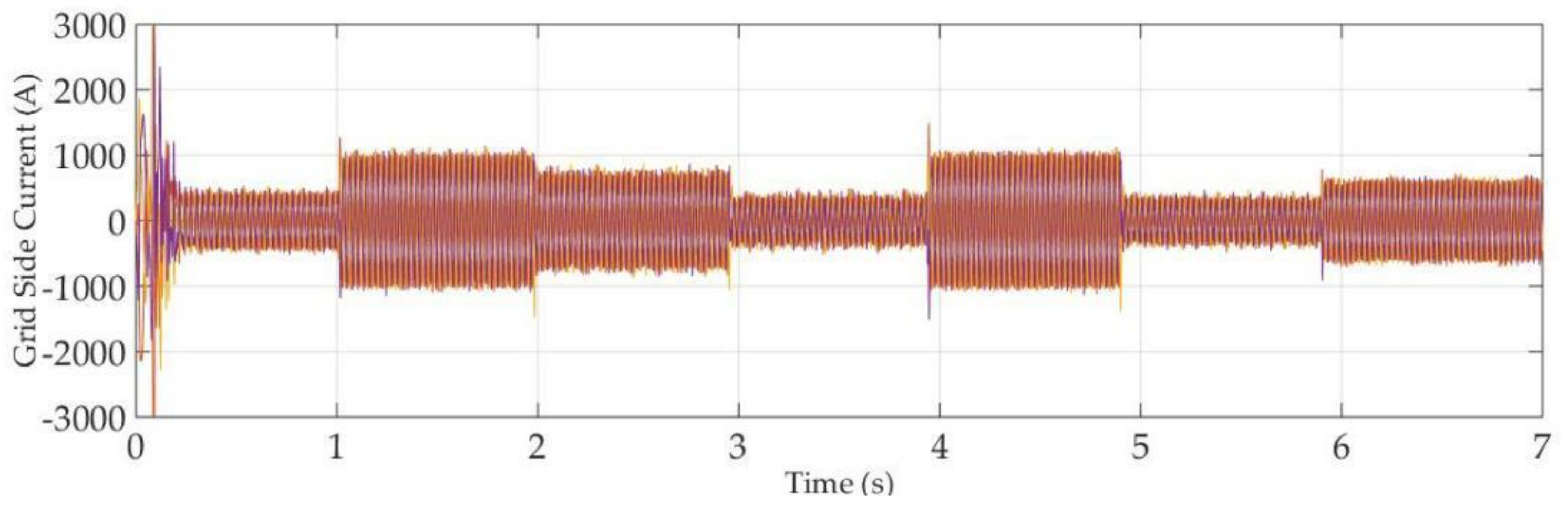
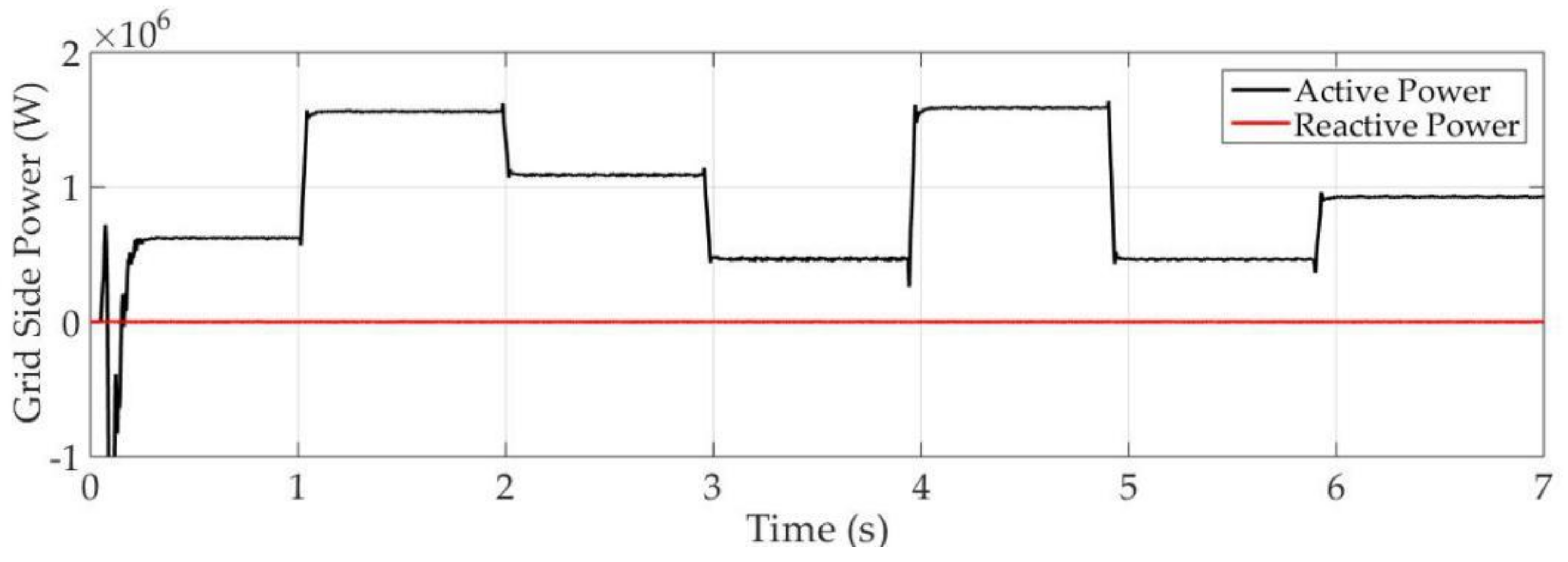
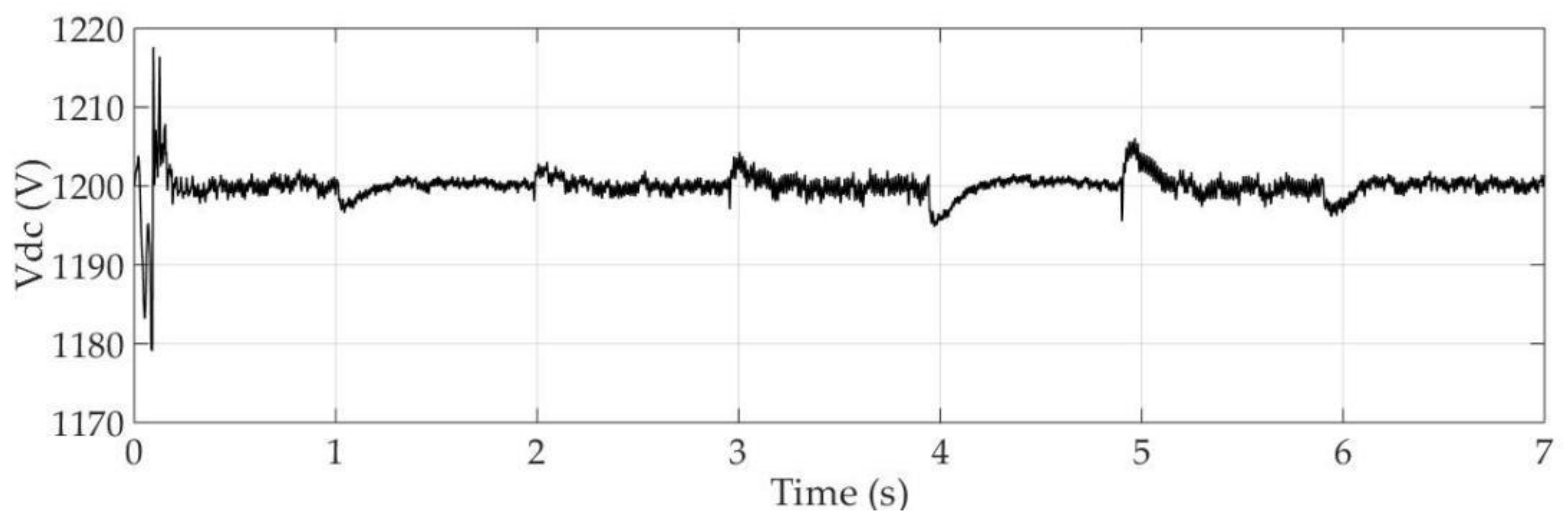
3.2.3. Model Validation
3.3. The Joint Simulation of ADAMS and MATLAB
4. Fault Diagnosis Based on DTCWT Energy Entropy and SVM
4.1. Dual-Tree Complex Wavelet Energy Entropy Feature Extraction
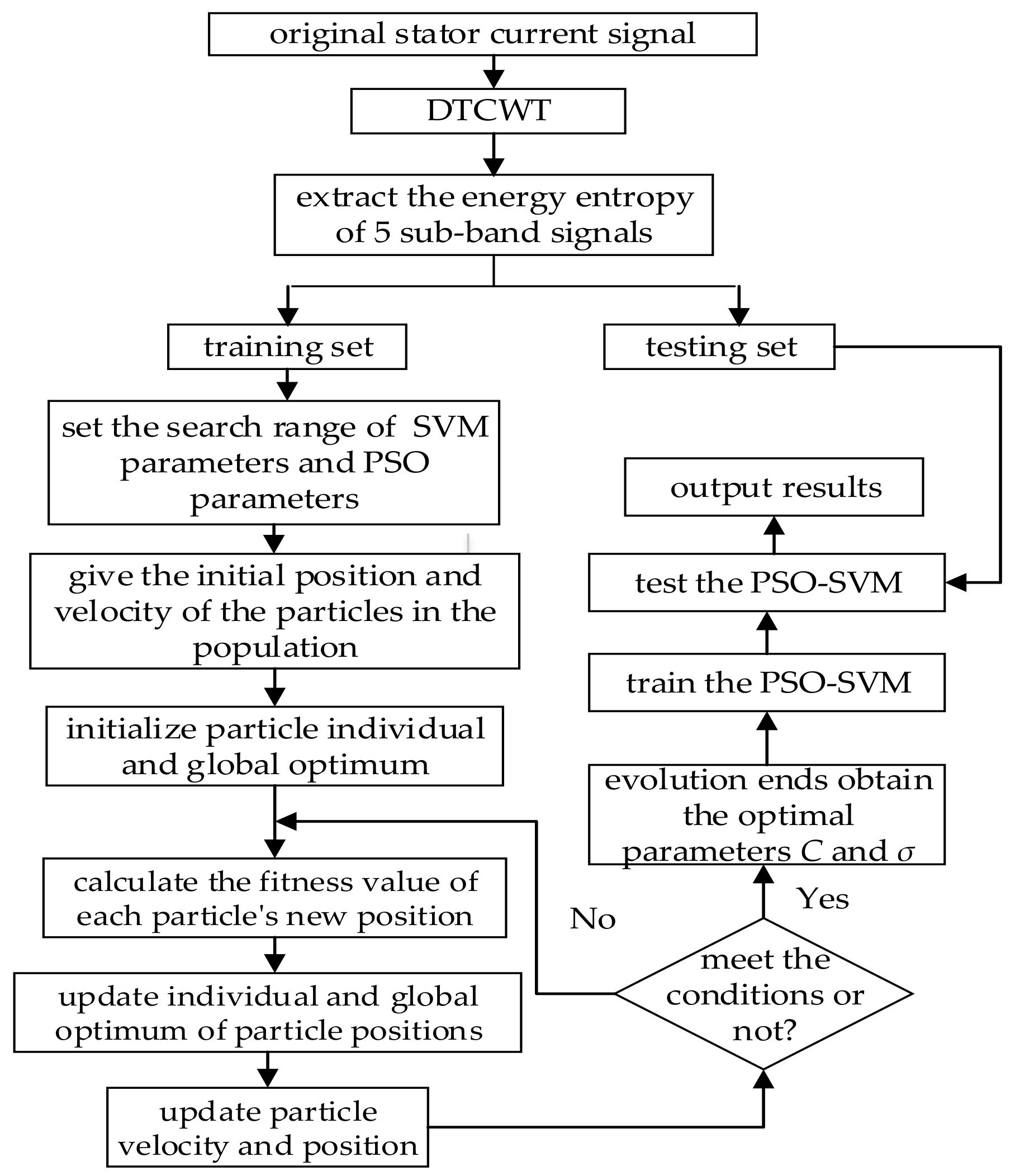
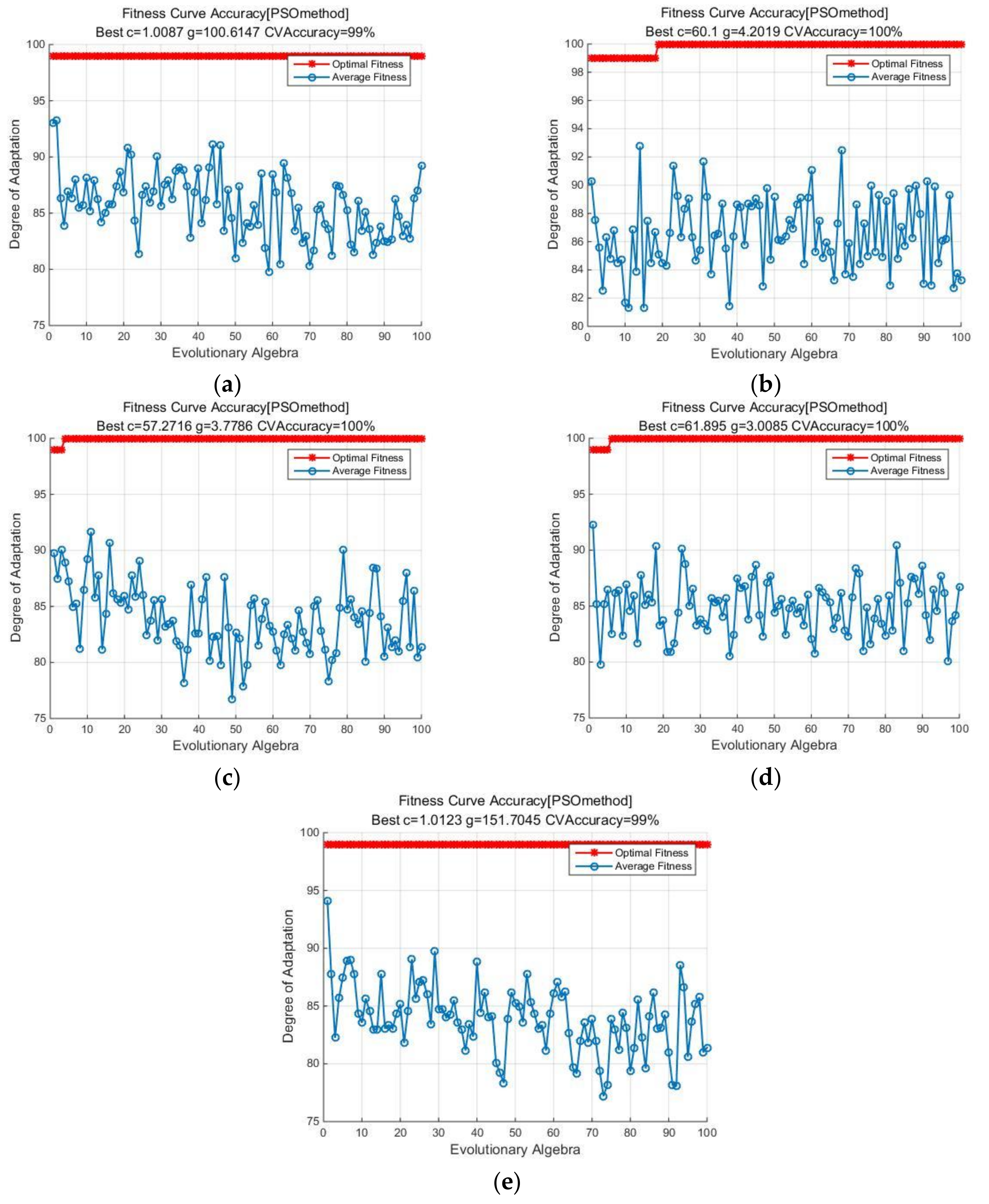
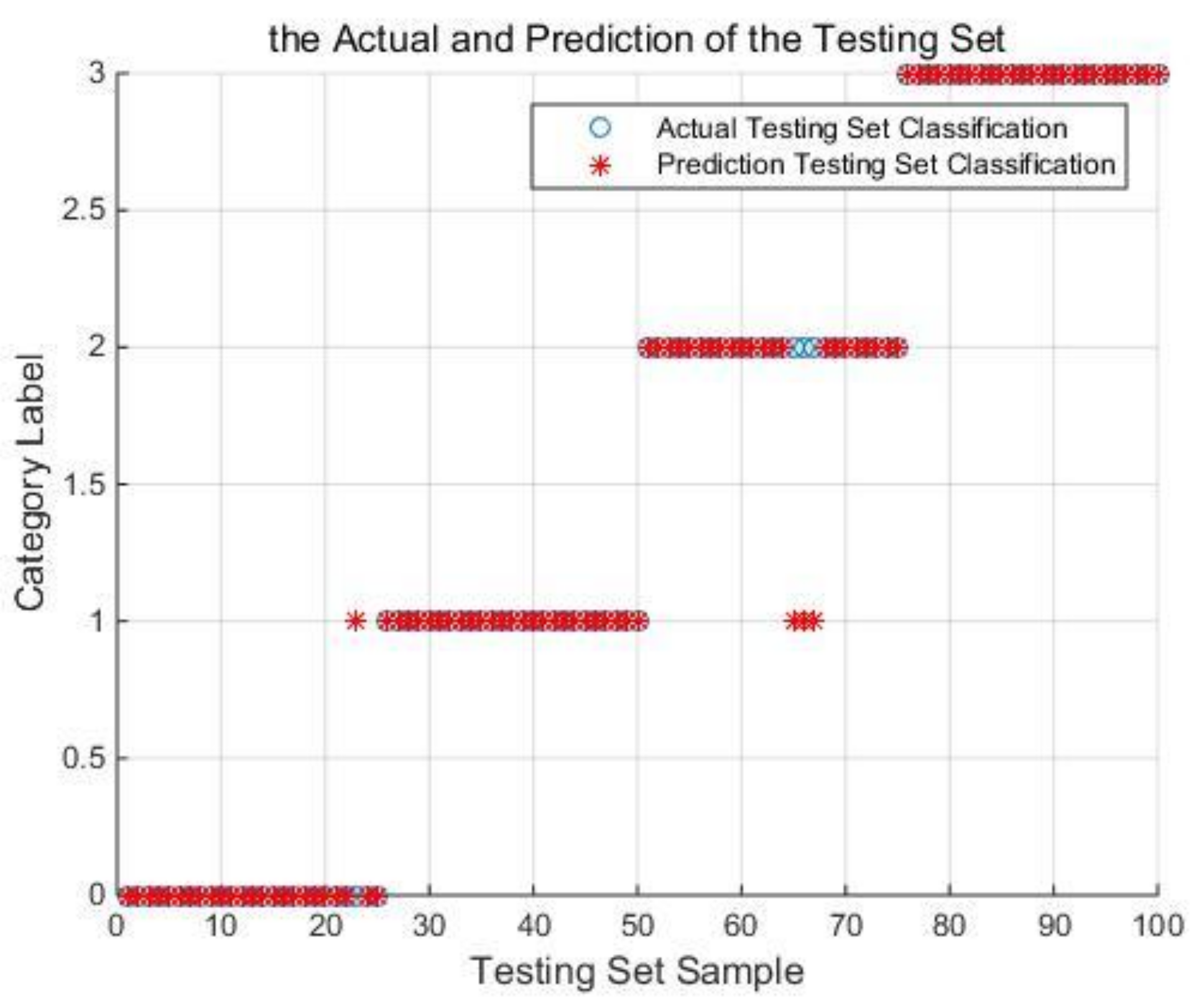
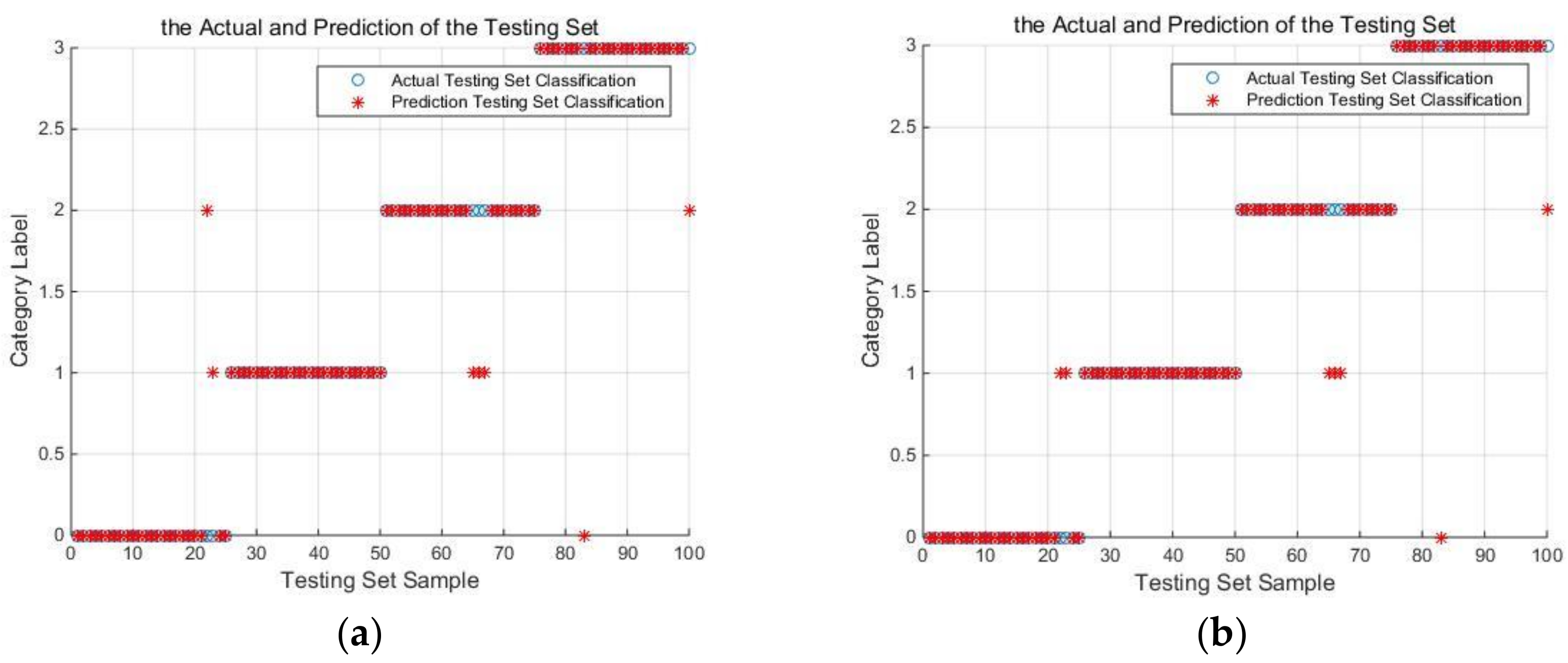
4.2. Fault Diagnosis Method Based on PSO-SVM
- Initialize the size of the particle swarm, the acceleration factor, the maximum iterative number, the initial velocity and position of each particle;
- Initialize the fitness values of each particle according to the fitness function for all the particles in the whole population;
- Calculate the new velocity of the particle according to Formula (4) and limit the new velocity of each particle to the interval ;
- Calculate the new position of the particle according to Formula (5) and limit the new position of each particle to the interval ;
- For each particle, update the best position ;
- Update the group extreme value ;
- If the termination condition is satisfied, the solution can be gotten. Otherwise, return to step (3) to continue the search until the termination condition is satisfied.
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Xiao, Y.; Wang, Y.; Mu, H.; Kang, N. Research on Misalignment Fault Isolation of Wind Turbines Based on the Mixed-Domain Features. Algorithms 2017, 10, 67. [Google Scholar] [CrossRef]
- Hameed, Z.; Hong, Y.S.; Cho, Y.M.; Ahn, S.H.; Song, C.K. Condition monitoring and fault detection of wind turbine and related algorithms: A review. Renew. Sustain. Energy Rev. 2009, 13, 1–39. [Google Scholar] [CrossRef]
- Liao, M.; Liang, Y.; Wang, S.; Wang, Y. Failure analysis of misalignment of wind turbine failure. Mech. Sci. Technol. 2011, 30, 173–190. [Google Scholar]
- Long, J.; Wu, J. Fault Diagnosis of Rotor Misalignment for Windmill Generators. Noise Vib. Control 2013, 3, 222–225. [Google Scholar]
- Hou, J.; Ding, H.; Yang, Z. Fault Diagnosis of Rotor Bearing System Based on Stator Current. Coal Technol. 2015, 34, 268–271. [Google Scholar]
- Zhang, J. Research on Gear Fault Diagnosis of Wind Turbine Based on Stator Current Method. Master’s Thesis, Harbin University of Science and Technology, Harbin, China, March 2016. [Google Scholar]
- Yang, M.; Li, G.; Dong, C.; Chai, N.; Xu, D. Gear fault diagnosis method based on MCSA. J. Beijing Jiaotong Univ. 2015, 39, 87–91. [Google Scholar]
- Zhang, K.; Wan, N. Application of stator current method in fault diagnosis of asynchronous motor. In Proceedings of the 12th National Conference on Equipment Monitoring and Diagnosis, Hainan, China, November 2005. [Google Scholar]
- Zhang, T. Fault Detection in Locomotive Traction Motors by Stator Current Dual-Tree Complex Wavelet Analysis. Master’s Thesis, Beijing Jiaotong University, Beijing, China, March 2016. [Google Scholar]
- Xu, Y.; Meng, Z.; Zhao, G. Study on compound fault diagnosis of rolling bearing based on dual-tree complex wavelet transform. Chin. J. Sci. Instrum. 2014, 35, 447–452. [Google Scholar]
- Xiao, Y.; Kang, N.; Hong, Y.; Zhang, G. Misalignment Fault Diagnosis of DFWT Based on IEMD Energy Entropy and PSO-SVM. Entropy 2017, 19, 6. [Google Scholar] [CrossRef]
- Zhu, X. Research on Rotating Machine Fault Diagnosis and State Prediction Method Based on Support Vector Machine. Ph.D. Thesis, North China Electric Power University, Beijing, China, March 2013. [Google Scholar]
- Xu, X. Research on Rotating Machinery Vibration Fault Diagnosis Based on Support Vector Machine. Master’s Thesis, Northeast Petroleum University, Daqing, China, May 2016. [Google Scholar]
- Li, N. The Fault Diagnosis Method of Support Vector Machine Based on fuzzy C-Mean and Particle Swarm Optimization. Master’s Thesis, University of Electronic Science and Technology of China, Chengdu, China, May 2011. [Google Scholar]
- Xiao, Y.; Zhang, T.; Ding, Z.; Li, C. The Study of Fuzzy Proportional Integral Controllers Based on Improved Particle Swarm Optimization for Permanent Magnet Direct Drive Wind Turbine Converters. Energies 2016, 9, 343. [Google Scholar] [CrossRef]
- Kingsbury, N.G. The dual-tree complex wavelet transform: A new technique for shift invariance and directional filters. IEEE Digit. Signal Process. Workshop 1998, 98, 2–5. [Google Scholar]
- Selesnick, I.W.; Baraniuk, R.G.; Kingsbury, N.G. The dual-tree complex wavelet transform. IEEE Digit. Signal Process. Mag. 2005, 22, 123–152. [Google Scholar] [CrossRef]
- Vermaak, H.; Nsengiyumva, P.; Luwes, N. Using the Dual-Tree Complex Wavelet Transform for Improved Fabric Defect Detection. J. Sens. 2016, 2016, 9794723. [Google Scholar] [CrossRef]
- Meng, Z. Applications of Electromechanical Equipment Fault Diagnosis Based on Dual-Tree Complex Wavelet. Master’s Thesis, Beijing University of Technology, Beijing, China, March 2014. [Google Scholar]
- Chakraborty, S.; Chatterjee, A. A dual-tree complex wavelet transform-based approach for recognition of power system transients. Expert Syst. 2015, 32, 132–140. [Google Scholar] [CrossRef]
- Rajesh, D.S.; Shekar, B.H. Undecimated dual tree complex wavelet transform based face recognition. In Proceedings of the 2016 International Conference on Advances in Computing, Communications and Informatics, Jaipur, India, 21–24 September 2016. [Google Scholar]
- Suykens, J.A.K. Support Vector Machines: A Nonlinear Modelling and Control Perspective. Eur. J. Control 2001, 7, 311–327. [Google Scholar] [CrossRef]
- Suykens, J.A.K.; Vandewalle, J. Recurrent least squares support vector machines. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 2008, 47, 1109–1114. [Google Scholar] [CrossRef]
- Zhang, X.G. Introduction to Statistical Learning Theory and Support Vector Machines. Available online: http://en.cnki.com.cn/Article_en/CJFDTOTAL-MOTO200001005.htm (accessed on 2 November 2017).
- Wei, W. The Research of Gear Fault Diagnosis Based on Image Recognition. Master’s Thesis, Zhengzhou University, Zhengzhou, China, May 2016. [Google Scholar]
- Xu, K.; Zheng, X. Diagnosis on Wind Turbine Faults Based on Multi-classification Support Vector Machine. Zhejiang Electr. Power 2015, 4, 54. [Google Scholar]
- Zhang, S.; Zhang, X.; Lei, T.; Di, Y. Research on Fault Diagnosis Based on PSO and SVM. Comput. Meas. Control 2008, 16, 1573–1575. [Google Scholar]
- Zhang, W.; Ma, D.; Wei, J.J.; Liang, H.F. A parameter selection strategy for particle swarm optimization based on particle positions. Expert Syst. Appl. 2014, 41, 3576–3584. [Google Scholar] [CrossRef]
- Ma, R.; Yang, L.; Zhang, Z. Analysis the Characteristic of C1, C2 Based on the PSO of Iterative Shift and Trajectory of Particle. Math. Comput. 2013, 4, 109–115. [Google Scholar]
- Yuan, K. Improved Particle Swarm Optimization and Parameter Inversion in Internal Variable. Coal Geol. Explor. 2017, 45, 112–117. [Google Scholar]
- Wang, W.; Fang, X.; Zhong, Q. Weighted Statistical Model of Dam Monitoring Based on Improved Particle Swarm Optimization. J. Yangtze River Sci. Res. Inst. 2017, 34, 41–46. [Google Scholar]
- Pousinho, H.M.I.; Catalao, J.P.S.; Mendes, V.M.F. Wind power short-term prediction by a hybrid PSO-ANFIS approach. In Proceedings of the 15th IEEE Mediterranean Electrotechnical Conference, Valletta, Malta, 26–28 April 2010. [Google Scholar]
- Ren, Y.; An, Q. Flexible Grid Connected Operation and Control of Doubly Fed Wind Power Generation Unit, 1st ed.; China Machine Press: Beijing, China, 2011; pp. 12–144. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Methods | Characteristic |
|---|---|---|
| Traditional Signal Processing | Fourier Transform | Not applicable to time-varying signals and non-stationary signals |
| Modern Signal Processing | Wavelet Transform | Using variable size windowing technology, with strong local analysis ability of frequency band; prone to frequency aliasing and energy leaking |
| Dual-Tree Complex Wavelet Transform | With the advantages of wavelet transform, little frequency aliasing and energy leaking |
| Methods | Characteristic |
|---|---|
| Neural network | The adjustment methods of weight coefficients of neural network are limited; easy to get into local optimum; over-reliance on learning samples and requiring a lot of samples |
| Fuzzy | Determining the membership and corresponding laws based on experience and experiment, which has certain limitations |
| Expert system | With expert knowledge and experience; but the knowledge acquisition and development are difficult |
| SVM | Good generalization ability; suitable for a few samples; with global optimality |
| Fault Type | P1 | P2 | P3 | P4 | P5 |
|---|---|---|---|---|---|
| Normal Condition | 6.9166 | 12.0458 | 0.006 | 0.0441 | 1.6267 |
| 6.9187 | 12.0495 | 0.0061 | 0.0451 | 1.6273 | |
| 6.9196 | 12.0511 | 0.0059 | 0.0436 | 1.6274 | |
| 6.9199 | 12.0515 | 0.0058 | 0.0428 | 1.6274 | |
| 6.9254 | 12.0611 | 0.006 | 0.0445 | 1.629 | |
| Parallel Misalignment | 5.9174 | 10.3131 | 0.0046 | 0.0371 | 1.3723 |
| 5.9314 | 10.3375 | 0.0046 | 0.037 | 1.3758 | |
| 5.9437 | 10.3589 | 0.0047 | 0.0371 | 1.3789 | |
| 5.9529 | 10.3748 | 0.0047 | 0.0371 | 1.3813 | |
| 5.9712 | 10.4066 | 0.0047 | 0.0375 | 1.3859 | |
| Angle Misalignment | 7.1076 | 11.5805 | 2.8627 | 0.2311 | 1.8312 |
| 7.134 | 12.0723 | 1.3482 | 0.1344 | 1.7517 | |
| 7.1454 | 11.8373 | 2.225 | 0.2062 | 1.8049 | |
| 7.1698 | 11.4662 | 3.59 | 0.2938 | 1.8913 | |
| 7.2189 | 11.5697 | 3.5182 | 0.2481 | 1.8964 | |
| Comprehensive Misalignment | 10.7387 | 16.5385 | 7.3899 | 1.4555 | 3.1362 |
| 10.8266 | 16.4356 | 8.1625 | 1.7814 | 3.2307 | |
| 10.832 | 17.0982 | 6.1198 | 0.757 | 3.0325 | |
| 10.8764 | 17.1712 | 6.1879 | 1.5956 | 3.1145 | |
| 10.9098 | 14.4996 | 14.4082 | 2.7266 | 3.7177 |
| C1 | C2 | Evolution Algebra of Convergence (Reach 100%) | Optimal Fitness | Accuracy of Training Set | Accuracy of Testing Set |
|---|---|---|---|---|---|
| 3 | 3 | - | 99% | 99% (99/100) | 94% (94/100) |
| 2.2 | 2.2 | 18 | 100% | 100% (100/100) | 96% (96/100) |
| 2 | 2 | 4 | 100% | 100% (100/100) | 96% (96/100) |
| 1.8 | 1.8 | 5 | 100% | 100% (100/100) | 96% (96/100) |
| 1 | 1 | - | 99% | 100% (100/100) | 96% (96/100) |
| Item | Accuracy of Training Set | Accuracy of Testing Set | ||
|---|---|---|---|---|
| GridSearch-SVM | 16 | 4 | 100% (100/100) | 93% (93/100) |
| GA-SVM | 25.558 | 243.242 | 100% (100/100) | 93% (93/100) |
| PSO-SVM | 57.2716 | 3.7786 | 100% (100/100) | 96% (96/100) |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiao, Y.; Hong, Y.; Chen, X.; Chen, W. The Application of Dual-Tree Complex Wavelet Transform (DTCWT) Energy Entropy in Misalignment Fault Diagnosis of Doubly-Fed Wind Turbine (DFWT). Entropy 2017, 19, 587. https://doi.org/10.3390/e19110587
Xiao Y, Hong Y, Chen X, Chen W. The Application of Dual-Tree Complex Wavelet Transform (DTCWT) Energy Entropy in Misalignment Fault Diagnosis of Doubly-Fed Wind Turbine (DFWT). Entropy. 2017; 19(11):587. https://doi.org/10.3390/e19110587
Chicago/Turabian StyleXiao, Yancai, Yi Hong, Xiuhai Chen, and Weijia Chen. 2017. "The Application of Dual-Tree Complex Wavelet Transform (DTCWT) Energy Entropy in Misalignment Fault Diagnosis of Doubly-Fed Wind Turbine (DFWT)" Entropy 19, no. 11: 587. https://doi.org/10.3390/e19110587
APA StyleXiao, Y., Hong, Y., Chen, X., & Chen, W. (2017). The Application of Dual-Tree Complex Wavelet Transform (DTCWT) Energy Entropy in Misalignment Fault Diagnosis of Doubly-Fed Wind Turbine (DFWT). Entropy, 19(11), 587. https://doi.org/10.3390/e19110587