Stochastic Dynamics of a Time-Delayed Ecosystem Driven by Poisson White Noise Excitation

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Delayed-Type Predator-Prey System with Poisson White Noises
2.1. The Deterministic Model with Time Delay Terms
2.2. Stochastic Model
2.3. Stochastic Averaging Approach
2.4. Stationary Probability Density Functions
3. Results
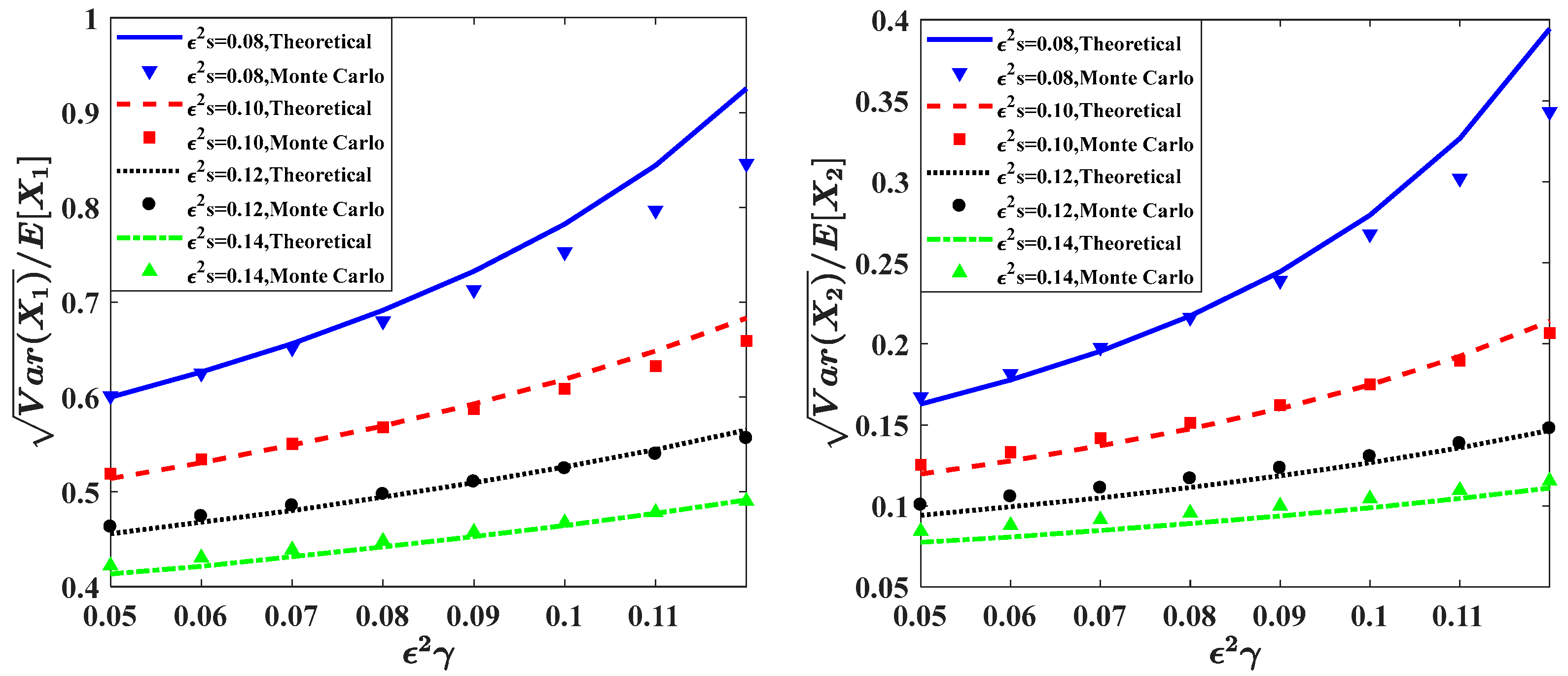
3.1. The Effects of the Time Delay Parameter
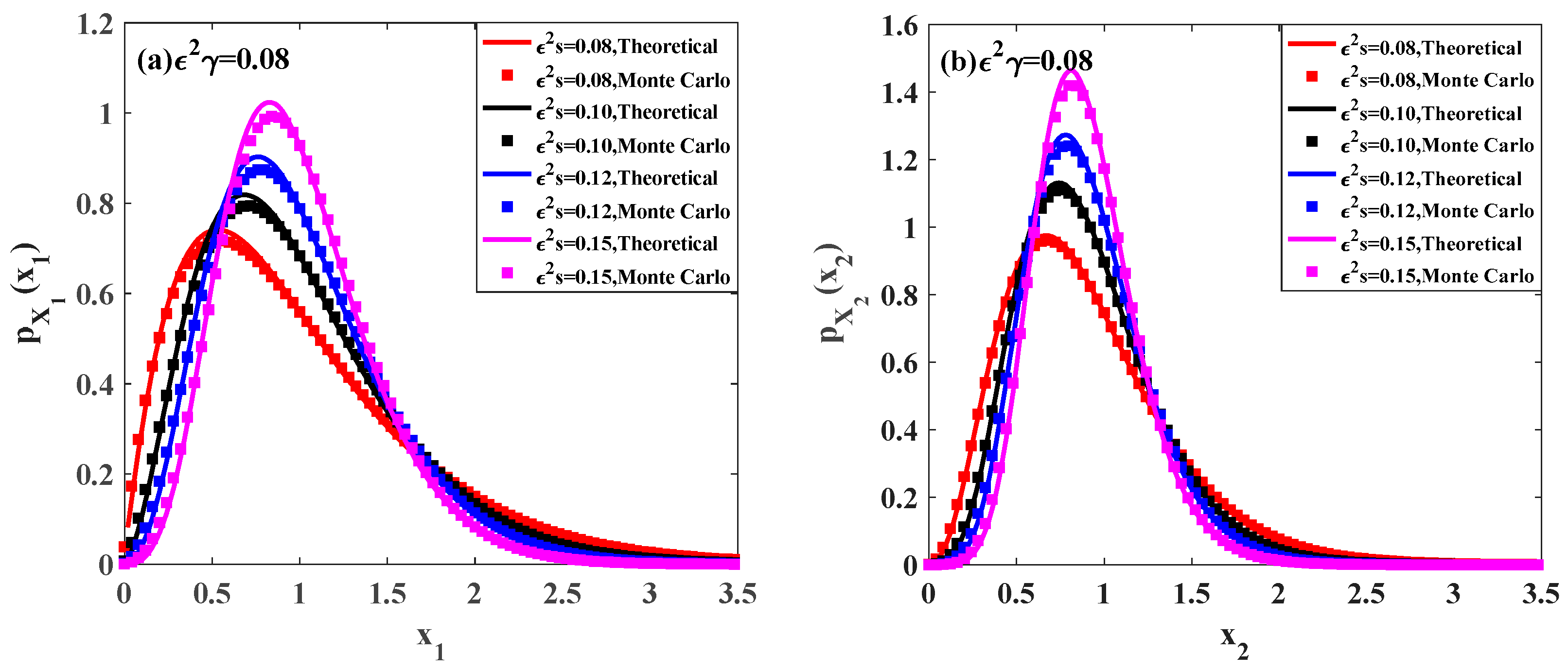
3.2. The Effects of the Self-Competition Parameter
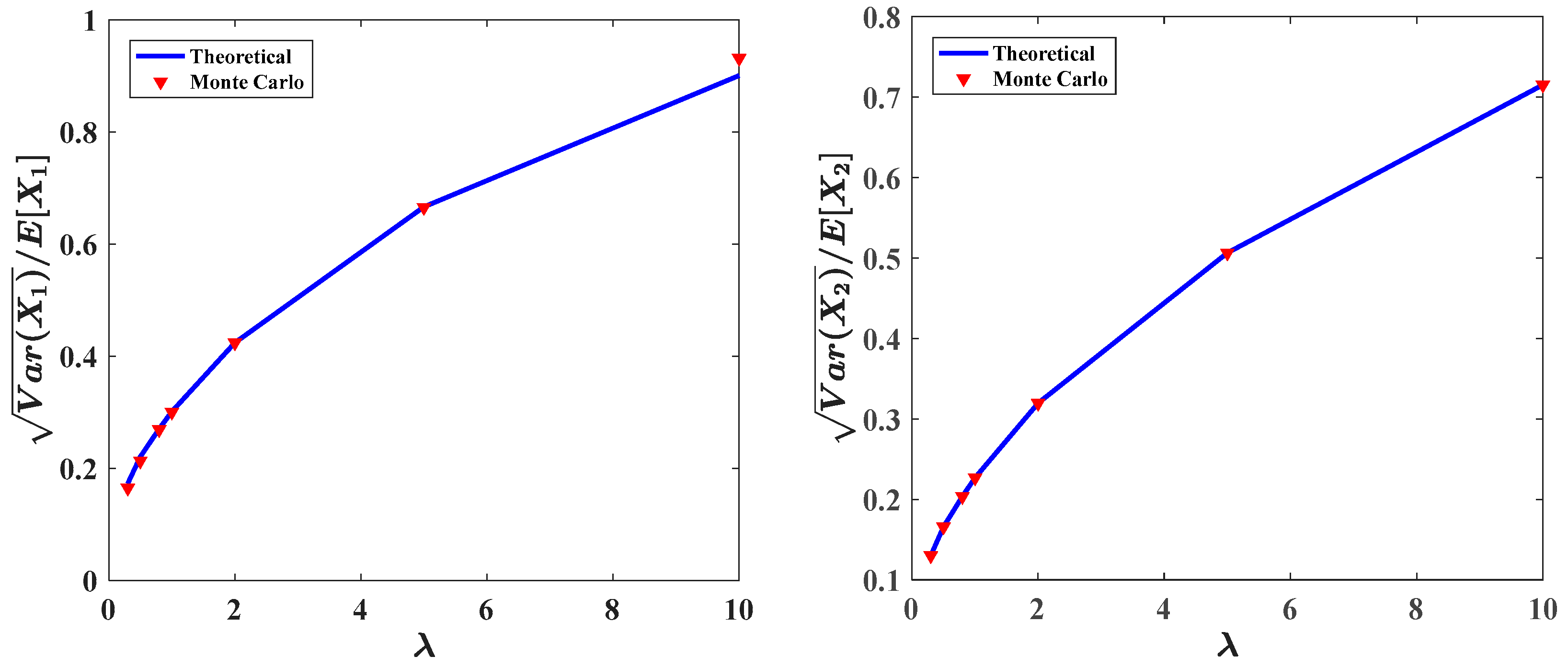
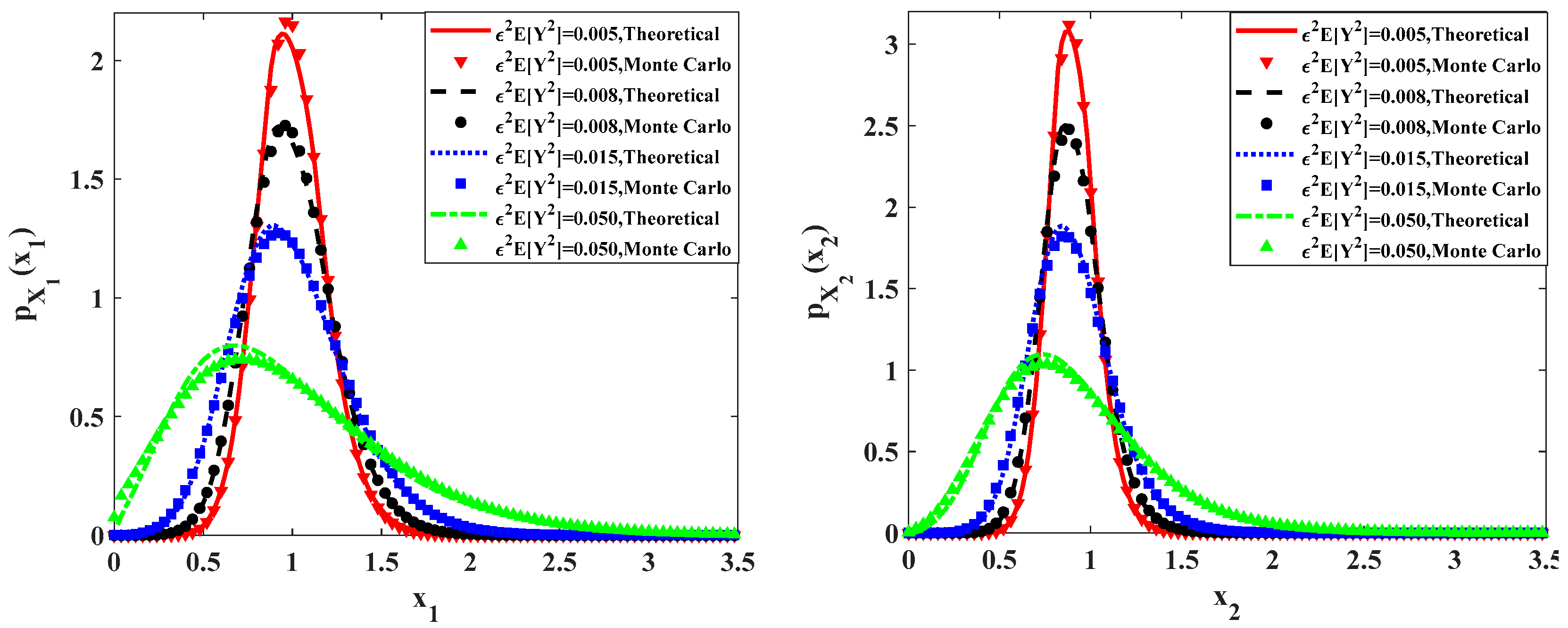
3.3. The Effects of the Poisson White Noise
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A
References
- May, R.M. Stability and complexity in model ecosystems. IEEE Trans. Syst. Man Cybern. 1977, 44, 887. [Google Scholar]
- May, R.; Mclean, A. Theoretical Ecology: Principles and Applications; Oxford University Press: Oxford, UK; New York, NY, USA, 2007; Volume 23, pp. 1147–1152. [Google Scholar]
- Macdonald, N. Time delay in prey-predator models. Math. Biosci. 1976, 28, 321–330. [Google Scholar] [CrossRef]
- Macdonald, N. Time delay in prey-predator models—II. Bifurcation theory. Math Biosci. 1977, 33, 227–234. [Google Scholar] [CrossRef]
- Nisbet, R.M.; Gurney, W. Modelling Fluctuating Populations: Reprint of First Edition (1982); Blackburn Press: Caldwell, NJ, USA, 2003. [Google Scholar]
- Hornfeldt, B. Delayed density-dependence as a determinant of vole cycles. Ecology 1994, 75, 791–806. [Google Scholar] [CrossRef]
- Hutchinson, G.E. Circular causal systems in ecology. Ann. N. Y. Acad. Sci. 1948, 50, 221–246. [Google Scholar] [CrossRef] [PubMed]
- Cai, G.Q.; Lin, Y.K. Stochastic analysis of the Lotka-Volterra model for ecosystems. Phys. Rev. E 2004, 70, 041910. [Google Scholar] [CrossRef] [PubMed]
- Cai, G.Q.; Lin, Y.K. Stochastic analysis of time-delayed ecosystems. Phys. Rev. E 2007, 76, 041913. [Google Scholar] [CrossRef] [PubMed]
- Rozenfeld, A.F.; Tessone, C.J.; Albano, E.; Wio, H.S. On the influence of noise on the critical and oscillatory behavior of a predator-prey model: Coherent stochastic resonance at the proper frequency of the system. Phys. Lett. A 2001, 280, 45–52. [Google Scholar] [CrossRef]
- Leslie, P.H.; Gower, J.C. The properties of a stochastic model for the predator-prey type of interaction between two species. Biometrika 1960, 47, 219–234. [Google Scholar] [CrossRef]
- Du, N.H.; Sam, V.H. Dynamics of a stochastic Lotka-Volterra model perturbed by white noise. J. Math. Anal. Appl. 2006, 324, 82–97. [Google Scholar] [CrossRef]
- Cai, G.Q.; Lin, Y.K. Stochastic analysis of predator-prey type ecosystems. Ecol. Complex. 2007, 4, 242–249. [Google Scholar] [CrossRef]
- Cai, G.Q.; Lin, Y.K. Stochastic modeling of ecosystem with two competing species. Probabilist. Eng. Mech. 2012, 27, 2–7. [Google Scholar] [CrossRef]
- Ji, C.Y.; Jiang, D.Q.; Shi, N.Z. Analysis of a predator-prey model with modified leslie-gower and holling-type ii schemes with stochastic perturbation. J. Math. Anal. Appl. 2009, 359, 482–498. [Google Scholar] [CrossRef]
- Spagnolo, B.; Valenti, D.; Fiasconaro, A. Noise in ecosystems: A short review. Math. Biosci. Eng. 2004, 1, 185–211. [Google Scholar] [PubMed]
- Gu, X.D.; Zhu, W.Q. Stochastic optimal control of predator-prey ecosystem by using stochastic maximum principle. Nonlinear Dyn. 2016, 85, 1177–1184. [Google Scholar] [CrossRef]
- Cai, G.Q. Application of stochastic averaging to non-linear ecosystems. Int. J. Nonlinear Mech. 2009, 44, 769–775. [Google Scholar] [CrossRef]
- Qi, L.; Cai, G.Q. Dynamics of nonlinear ecosystems under colored noise disturbances. Nonlinear Dyn. 2013, 73, 463–474. [Google Scholar] [CrossRef]
- Wang, S.L.; Jin, X.L.; Huang, Z.L.; Cai, G.Q. Break-out of dynamic balance of nonlinear ecosystems using first passage failure theory. Nonlinear Dyn. 2015, 80, 1403–1411. [Google Scholar] [CrossRef]
- Nie, L.R.; Mei, D.C. Effects of time delay on symmetric two-species competition subject to noise. Phys. Rev. E 2008, 77, 031107. [Google Scholar] [CrossRef] [PubMed]
- Qi, L.Y.; Xu, W.; Gao, W.T. Stationary response of Lotka-Volterra system with real noises. Commun. Theor. Phys. 2013, 59, 503–509. [Google Scholar] [CrossRef]
- Jin, Y.F.; Xie, W.X. Stability of a delayed predator-prey model in a random environment. Chin. Phys. B 2015, 24, 110501. [Google Scholar] [CrossRef]
- Valenti, D.; Fiasconaro, A.; Spagnolo, B. Stochastic resonance and noise delayed extinction in a model of two competing species. Physica A 2004, 331, 477–486. [Google Scholar] [CrossRef]
- Bittner, H.R.; Tosi, P.; Braun, C.; Meesmann, M.; Kniffki, K.D. Counting statistics of f(-beta) fluctuations: A new method for analysis of earthquake data. Geol. Rundsch. 1996, 85, 110–115. [Google Scholar] [CrossRef]
- Hurst, A.W. Stochastic simulation of volcanic tremor from ruapehu. J. Volcanol. Geotherm. Res. 1992, 51, 185–198. [Google Scholar] [CrossRef]
- Mejia, A.; Daly, E.; Rossel, F.; Jovanovic, T.; Gironas, J. A stochastic model of streamflow for urbanized basins. Water Resour. Res. 2014, 50, 1984–2001. [Google Scholar] [CrossRef]
- Daly, E.; Porporato, A. Probabilistic dynamics of some jump-diffusion systems. Phys. Rev. E 2006, 73, 026108. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.Q.; Xu, Y.; Yang, H. Levy noise induced stochastic resonance in an FHN model. Sci. China-Technol. Sci. 2016, 59, 371–375. [Google Scholar] [CrossRef]
- Yu, J.; Liu, M. Stationary distribution and ergodicity of a stochastic food-chain model with levy jumps. Physica A 2017, 482, 14–28. [Google Scholar] [CrossRef]
- Zou, X.; Wang, K. Numerical simulations and modeling for stochastic biological systems with jumps. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 1557–1568. [Google Scholar] [CrossRef]
- Wu, Y.; Zhu, W.Q. Stochastic analysis of a pulse-type prey-predator model. Phys. Rev. E 2008, 77, 041911. [Google Scholar] [CrossRef] [PubMed]
- Pan, S.S.; Zhu, W.Q. Dynamics of a prey-predator system under Poisson white noise excitation. Acta Mech. Sin. 2014, 30, 739–745. [Google Scholar] [CrossRef]
- Duan, D.H.; Xu, W.; Su, J.; Zhou, B.C. The stochastic stability of a logistic model with Poisson white noise. Chin. Phys. B 2011, 20, 030501. [Google Scholar] [CrossRef]
- Di Paola, M.; Falsone, G. Itô and Stratonovich integrals for delta-correlated processes. Probab. Eng. Mech. 1993, 8, 197–208. [Google Scholar] [CrossRef]
- Di Paola, M.; Falsone, G. Stochastic dynamics of nonlinear systems driven by non-normal delta-correlated processes. J. Appl. Mech. 1993, 60, 141–148. [Google Scholar] [CrossRef]
- Khasminskii, R.Z.; Klebaner, F.C. Long term behavior of solutions of the Lotka-Volterra system under small random perturbations. Ann. Appl. Probab. 2001, 11, 952–963. [Google Scholar] [CrossRef]
- Xu, Y.; Li, H.; Wang, H.Y.; Jia, W.T.; Yue, X.L.; Kurths, J. The estimates of the mean first exit time of a bistable system excited by Poisson white noise. J. Appl. Mech. 2017, 84, 091004. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhu, W. Stochastic averaging of quasi-nonintegrable-Hamiltonian systems under Poisson white noise excitation. J. Appl. Mech. 2011, 78, 021002. [Google Scholar] [CrossRef]
- Jia, W.T.; Xu, Y.; Liu, Z.H.; Zhu, W.Q. An asymptotic method for quasi-integrable Hamiltonian system with multi-time-delayed feedback controls under combined Gaussian and Poisson white noises. Nonlinear Dyn. 2017, 90, 2711–2727. [Google Scholar] [CrossRef]
- Xu, Y.; Duan, J.; Xu, W. An averaging principle for stochastic dynamical systems with Lévy noise. Physica D 2011, 240, 1395–1401. [Google Scholar] [CrossRef]
- Hanson, F.B. Applied Stochastic Processes and Control for Jump-Diffusions: Modeling, Analysis, and Computation; SIAM: Philadelphia, PA, USA, 2007. [Google Scholar]
- Washenberger, M.J.; Mobilia, M.; Tauber, U.C. Influence of local carrying capacity restrictions on stochastic predator-prey models. J. Phys. Condens. Matter 2007, 19, 065139. [Google Scholar] [CrossRef]
- Cai, G.; Lin, Y. Response distribution of non-linear systems excited by non-Gaussian impulsive noise. Int. J. Nonlinear Mech. 1992, 27, 955–967. [Google Scholar] [CrossRef]












© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jia, W.; Xu, Y.; Li, D. Stochastic Dynamics of a Time-Delayed Ecosystem Driven by Poisson White Noise Excitation. Entropy 2018, 20, 143. https://doi.org/10.3390/e20020143
Jia W, Xu Y, Li D. Stochastic Dynamics of a Time-Delayed Ecosystem Driven by Poisson White Noise Excitation. Entropy. 2018; 20(2):143. https://doi.org/10.3390/e20020143
Chicago/Turabian StyleJia, Wantao, Yong Xu, and Dongxi Li. 2018. "Stochastic Dynamics of a Time-Delayed Ecosystem Driven by Poisson White Noise Excitation" Entropy 20, no. 2: 143. https://doi.org/10.3390/e20020143
APA StyleJia, W., Xu, Y., & Li, D. (2018). Stochastic Dynamics of a Time-Delayed Ecosystem Driven by Poisson White Noise Excitation. Entropy, 20(2), 143. https://doi.org/10.3390/e20020143