1. Introduction
It is important to improve the performance of target detection in a clutter for a radar system. Due to the limitation of sample data, classical constant false alarm rate (CFAR) detector based on fast Fourier transform (FFT) [
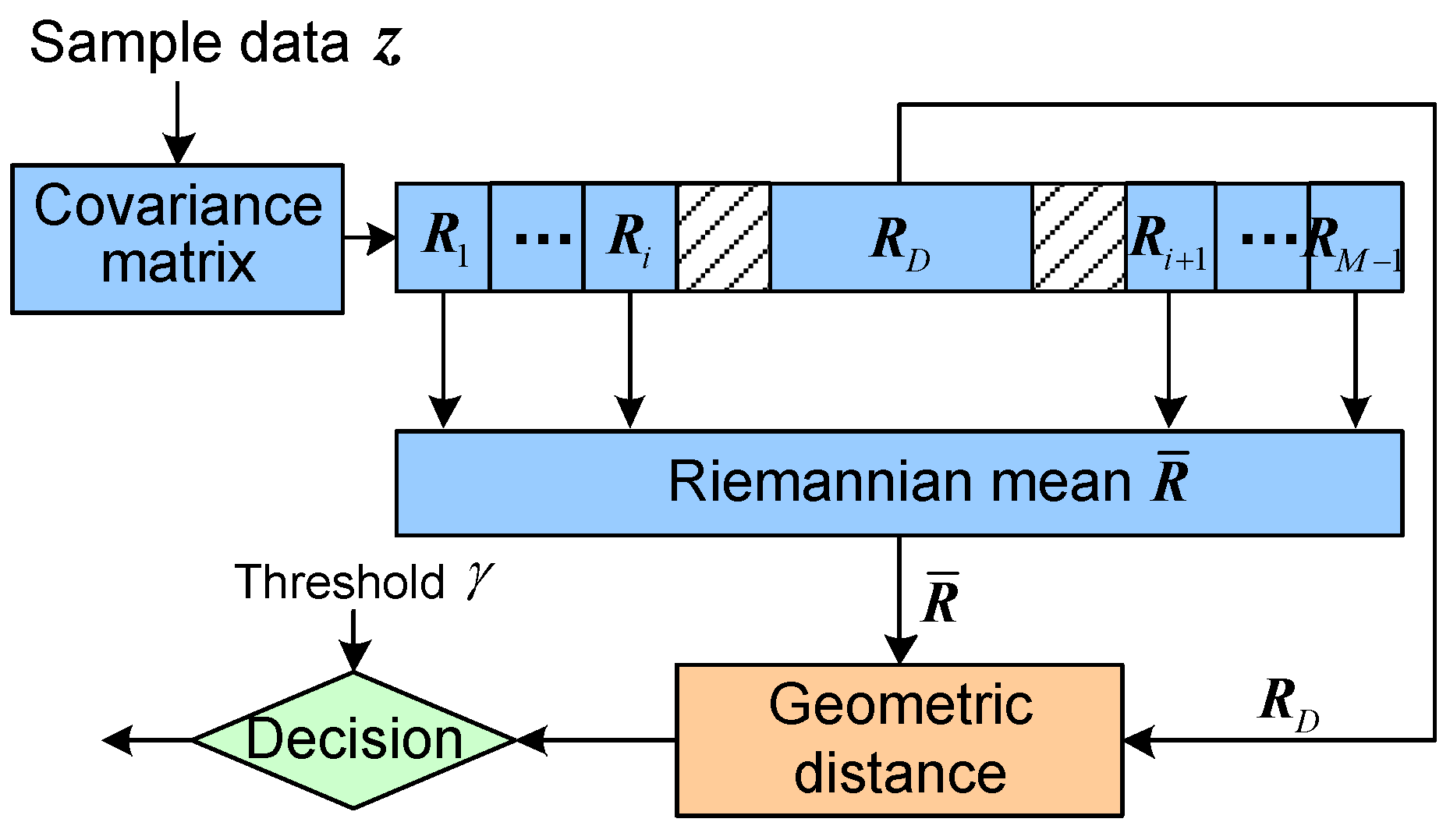
1] experiences performance degradation. This is because, the energy of the Doppler filter banks spreads and the Doppler resolution is poor, when the correlation of the sample data is captured by the FFT. To address these problems, Barbaresco investigated a geometric detection algorithm on a Hermitian positive-definite (HPD) matrix manifold, named as Riemannian distance-based geometric detector [
2]. An HPD matrix
is utilized to model the information of each cell, as the sample data
is assumed to be following a complex circular Gaussian distribution with zero mean. Then, the detection statistic in each cell is the Riemannian distance of the matrix
of the cell under test and the mean
of its surrounding cells. Finally, the detection statistic is compared with a threshold
to determine the decision about “target absence” or “target presence”. It can be referred to
Figure 1.
In this geometric detector, the sample data of each cell in one coherent processing interval (CPI) is represented by an HPD matrix. According to this parameterization, the detection method is performed on the HPD matrix manifold, and the geometric characteristic is considered. Then, the metric is derived [
2,
3], and the existence and uniqueness of geometric mean had been proven in [
4]. The geometric detector has been used to monitor the turbulence of a plane [
5,
6,
7], target detection in coastal X-band and HF surface wave radars [
2,
3]. Experiment results show that this geometric detector outperforms the classical FFT-CFAR detector [
2].
The classical FFT-CFAR detector has a similar scheme to the geometric detector. The main differences between them lie in the following three aspects: (1) the correlation of sample data is captured by an HPD matrix, and not the FFT coefficient; (2) the Riemannian distance is utilized in the detector, and not the Euclidean distance; and (3) the average value of HPD matrices is the geometric mean, rather than the arithmetic average. These differences illuminate that different geometry space is considered in these two detectors.
Many divergences have been used as a distance-like function on the space of HPD matrices. For instance, the Hellinger distance has been utilized to design a geometric target detector in a clutter; the Bhattacharyya divergence is used for filtering in medical imaging [
8,
9]; and the Log-Euclidean distance has been employed to measure the dissimilarity of two HPD matrices [
10]. In these contexts, geometric measures have achieved performance improvement. In [
11], the total Bregman divergence is defined on the convex function space, and many perfect properties have been analyzed in theory. The t-center of HPD matrices have been derived according to the definition of total Bregman divergence. It has been applied to diffusion tensor magnetic resonance image analysis [
11], object tracking [
12], and shape retrieval [
13,
14]. More recently, the definition of total Jensen–Bregman divergence has been presented on the space of convex functions in [
15,
16]. This class of divergence has not been applied in practice. In [
17], a Kullback–Leibler divergence-based geometric target detection algorithm is proposed, and experimental results give a proof of performance improvement when compared to the classical FFT-CFAR detector. In [
18,
19], we have analyzed the anisotropy of the metric used in our geometric detection method. In particular, we have found that the detection performance of geometric detector is related to the measure used. In [
20], the definition of total Bregman divergence has been extended on the Riemannian manifold, and we have validated the superiority of performance of the total Bregman divergence-based geometric detector when compared with the Riemannian distance-based geometric detector. These results inspire us to study new measures.
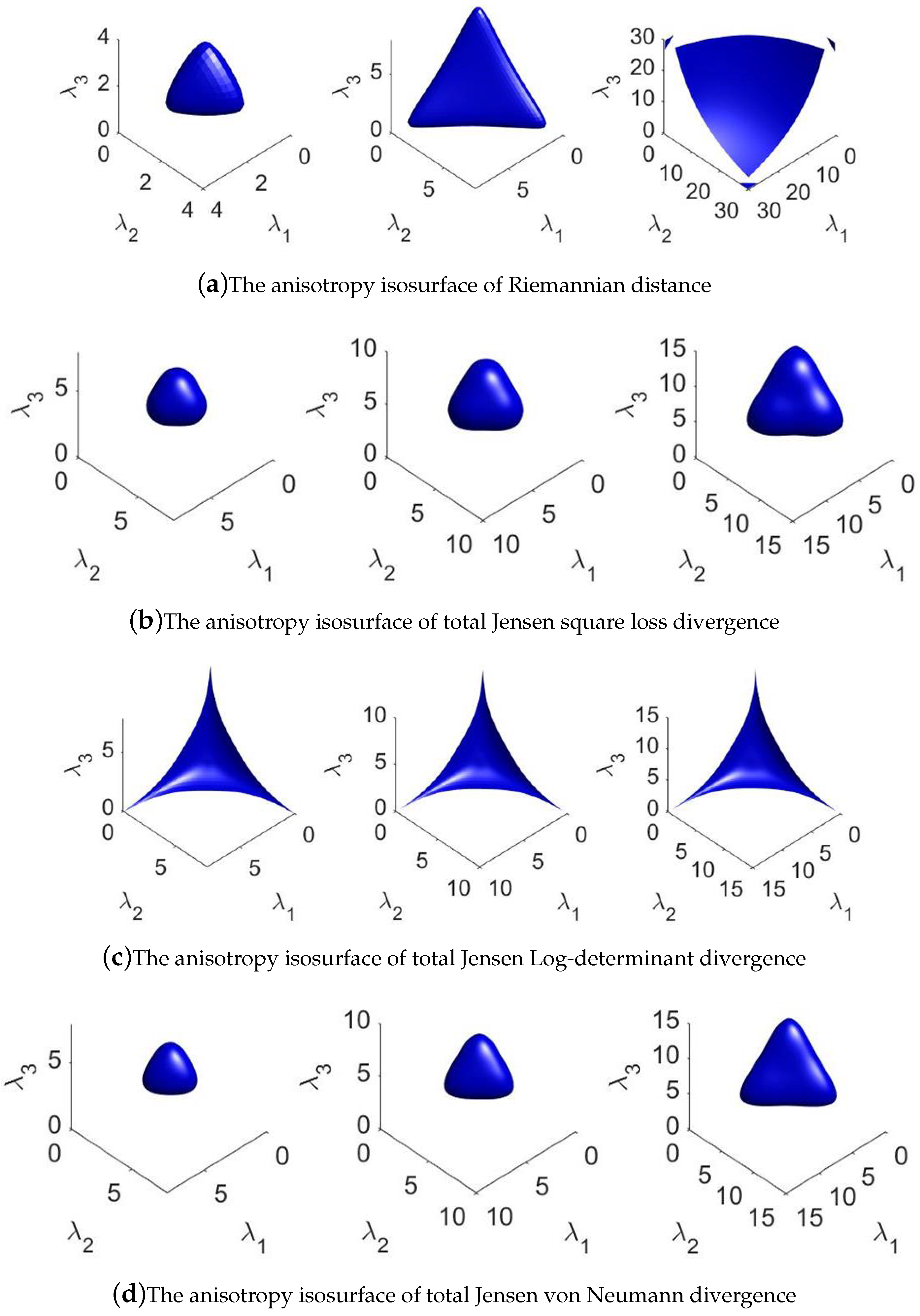
In this work, the definition of total Jensen–Bregman divergence is presented on the HPD matrix manifold. Specially, the total Jensen square loss, the total Jensen von Neumann divergence, and the total Jensen log-determinant divergence are proposed and defined. Based on three divergences, medians of HPD matrices are presented. As a result, a total Jensen–Bregman divergence-based radar target detection is developed. The main contribution of this paper is that a new class of total Jensen–Bregman divergence is proposed for designing the target detector on the Riemannian manifold.
The rest of this paper is organized as follows. In
Section 2, we give a description about the signal model and signal manifold. In
Section 3, the basic mathematical knowledge of matrix information geometry is presented. In particular, the definition of total Jensen–Bregman divergence is given. The median matrix associated with total Jensen–Bregman divergence is derived in
Section 4. Then, in
Section 5, we evaluate performances of total Jensen–Bregman divergences-based target detection algorithms as well as the Riemannian distance-based detector and the FFT-CFAR detector by simulated and real sea clutter data. Finally, a conclusion is provided in
Section 6.
Notation
Here are some notations for the descriptions of this article. A scalar x is denoted using the math italic. A matrix and a vector are noted as uppercase bold and lowercase bold, respectively. The conjugate transpose of matrix is denoted as . is the trace of matrix . is the determinant of matrix . is the identity matrix. All n-dimensional vectors are noted by . is the set of all Hermitian matrices. denotes the F-norm of . All positive-definite matrices in consist of the space . Finally, denotes the statistical expectation.
2. Signal Model and Signal Manifold
The radar usually receives the echo returned from a moving target, and the phase information is included in the echo data. The correlation of the sample data
can be used to capture the Doppler information of the target. Here, the data is assumed to follow a complex multivariate Gaussian distribution with zero mean,
[
2],
where the matrix
is given as [
2],
where
denotes the conjugate of
, and
is the coefficient of the sample data. Due to the limitation of number of the sample data, according to the ergodicity, the statistical expectation
can be computed by a finite time serials,
The sample data
of each cell in one CPI is represented by a Toeplitz matrix
. In particular, the sample data
lies in the linear space, while the matrix
is considered on the matrix manifold. Thus, the transformation can be given as,
constitutes a differentiable non-linear manifold [
21] with non-positive curvature [
22,
23]. Then, the target detection is performed on the Riemannian manifold. The manifold
is a symmetric space [
24], and more details are referred to [
25].
4. Total Jensen–Bregman Divergence Median on the Riemannian Manifold of HPD Matrices
Many literatures have been reported about the median matrix of HPD matrices. For instance, in [
27], the Riemannian median is defined as the minimizer of the sum of geodesic distances to given matrices. In [
9], Moakher defines the Log-Euclidean and Bhattacharyya medians for filtering the medical image. In the following, we give the definition of total Jensen–Bregman divergence median.
Definition 2. Let a convex function f be differentiable, for m HPD matrices , the median associated with total Jensen-Bregman divergence (10) is defined as, Note that the right-sided centroids are obtained by minimizing the equivalent left-sided centroids for , and . Therefore, we consider the left-sided centroids in the remainder.
In order to minimize Equation (
14), we proceed iteratively in two stages:
Stage 1: we consider
given, here,
. This allows us to consider the following simpler minimization problem:
Let
be the updated renormalized weights at stage
t.
This is a convex-concave minimization procedure [
28] (CCCP) that can be solved iteratively until it reaches convergence [
29]. The above two iterations can be formulated as following:
It is an open and challenging problem to prove that the total Jensen–Bregman medians are unique whatever the chosen multivariate
f, see [
29].
In the following, we will give total Jensen–Bregman medians according to different forms of f.
Proposition 1. For m HPD matrices , the median associated with total Jensen square loss (11) is given by, Proof of Proposition 1. According to Equation (
11),
, then we have,
☐
Substitution Equation (
20) into Equation (
18), and we can obtain the total Jensen square loss median as Equation (
19).
Proposition 2. For m HPD matrices , the median associated with total Jensen von Neumann divergence (12) is given by, Proposition 3. The definition of total Jensen von Neumann divergence is given by choosing the convex function . The first derivative of the function f and its inverse function are given as, Substitution Equation (
22) into Equation (
18), and we have the median as Equation (
21).
Proposition 4. The median associated with total Jensen log-determinant divergence (13), of m HPD matrices is given by, Proof of Proposition 3. The total Jensen von Neumann divergence is obtained by choosing the convex function
, and then we have,
☐
Substitution Equation (
24) into Equation (
18), and we have the median as Equation (
23).
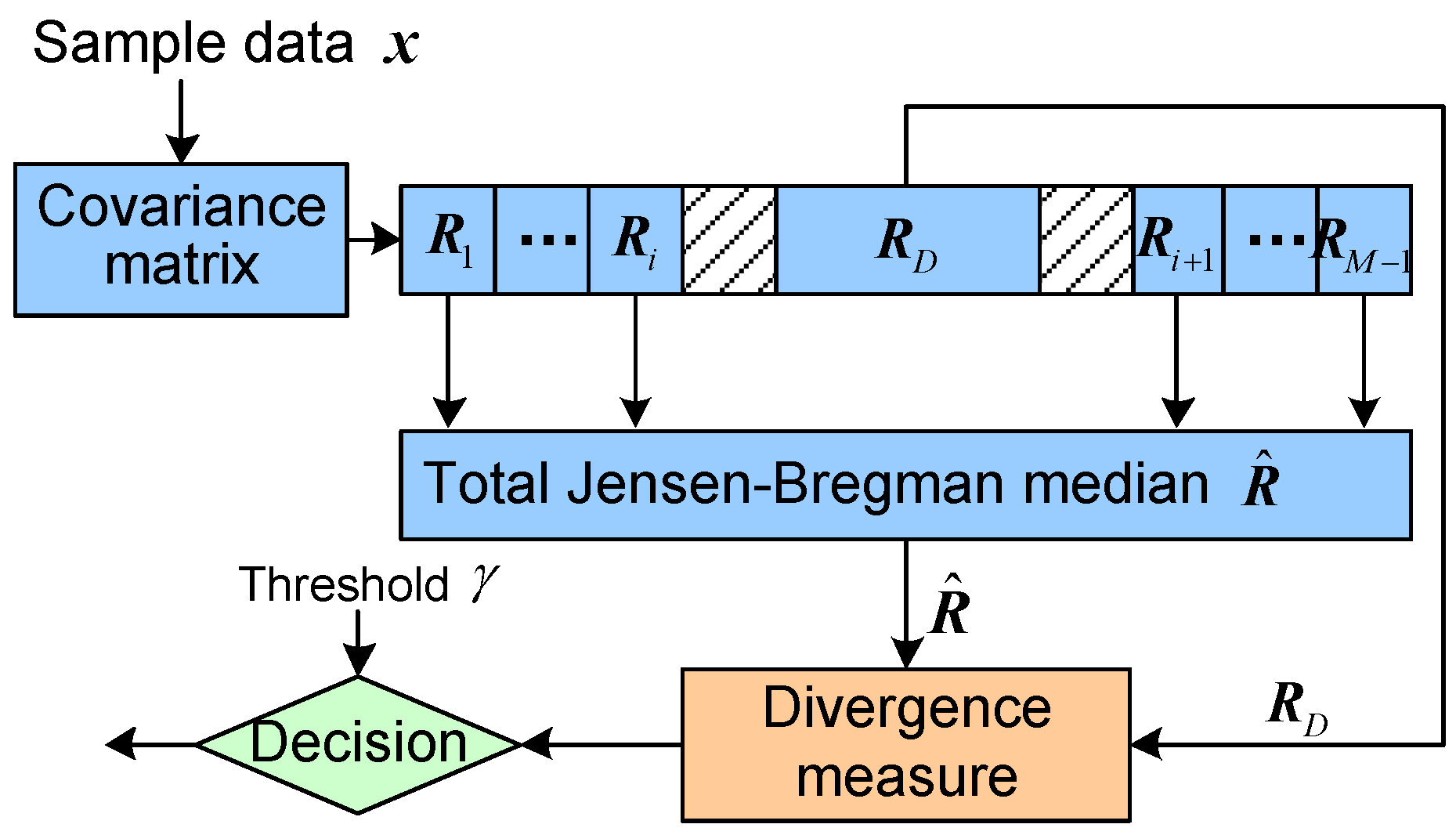
According to the definition of total Jensen–Bregman divergence, we can design the corresponding geometric detector illustrated in
Figure 3. The HPD matrix
of each cell is estimated by the sample data
according to its correlation coefficient. The detection statistic is the divergence
of the matrix
of cell under test and its median matrix
. Thus, the statistic is compared with a given threshold
for making the decision. The formulation of target detection can be given as,
5. Experimental Results
In this section, we analyze the performances of our proposed detection algorithms in terms of probability of detection (
). We also compare detection performances of our proposed geometric detectors, named as TJSL (total Jensen square loss), TJLD (total Jensen log-determinant divergence), and TJVN (total Jensen von Neumann divergence), in comparison with the classical FFT-CFAR detector [
1] and the Riemannian distance-based target detection algorithm [
2], abbreviated as the Riemannian detector.
5.1. Numerical Simulation
In simulation experiments, we make use of the Monte Carlo counting technique to test performances of the TJSL detector, the TJVN detector, the TJLD detector, the Riemannian detector, and the FFT-CFAR detector. We consider a radar system, the pulse repetition frequency (PRF) is 1000 Hz, and the radar central frequency
is 9 GHz. Seven pulses data are contained in the received echo, and the target model is given as
, where
is a parameter relating to the backscattering and the channel propagation effects.
p denotes the target steering vector,
where
denotes the Doppler frequency, and
is the pulse repetition interval. We assume the target has a velocity
m/s. The number of reference cells is considered for 16. In many high resolution radar scenarios, the Gaussian distribution assumption is not consistent with the actual situation, and cannot be used as clutter model. The compound Gaussian model is more suitable for describing non-Gaussian clutter. The compound Gaussian clutter can be written as the product of two independent random variables. The speckle component is a zero mean Gaussian process, and the texture component is a non-negative random process. It describes the average power level of clutter [
30]. In our experiments, the non-Gaussian clutter is simulated via the
K distribution, the probability density function of
K distribution is given [
31],
where
is the modified Bessel function of the second kind with order
, and
is the gamma function.
v is the shape parameter, and
a denotes the scale parameter.
Simulation experiments are performed to validate detection performances of the TJSL detector, the TJVN detector, and the TJLD detector via the Monte Carlo technique. Results are compared with the Riemannian and FFT-CFAR detectors. As the threshold cannot be analyzed in theory, several -trial Monte Carlo simulations in the absence of a target are used to obtain the threshold for a given false alarm probability (). To estimate the detection probability accurately, the is computed by the relative frequency using 200 runs of Monte Carlo simulations.
Figure 4 gives plots of
vs SCRs for
. The SCR varies from
to 10 dB. Inspection of
Figure 4 highlights that our proposed detectors outperform the Riemannian detector. Particularly, the TJLD detector has the best performance when
;
; and
;
and followed by the TJSL detector. In addition, the rest of the presented results show that the TJLD detector has similar performance with the TJSL detector.
The strategy of our proposed geometric detector in this paper is that the decision about “target absence” or “target presence” is made according to the dissimilarity between the matrix of cell under test and the clutter covariance matrix estimated by its surrounding cells. The dissimilarity is very different with different used metrics. In our previous work [
18,
19], we have explored the relationship between the anisotropy of a measure and the performance of its corresponding geometric detector. The estimation accuracy of the covariance matrix is not the factor that affects the performance of the geometric detector, but the anisotropy, which reflects the geometric structure of manifold. Further work will be reported in our other papers.
In the following, we will illustrate the robustness of covariance estimation with respect to the number of samples collected. Given a covariance matrix
, several samples are generated by an N-dimension zero-mean Gaussian distribution with covariance matrix
. Then, we estimate the covariance matrix
according to these samples. Finally, the estimation accuracy denoted by the error value is computed as,
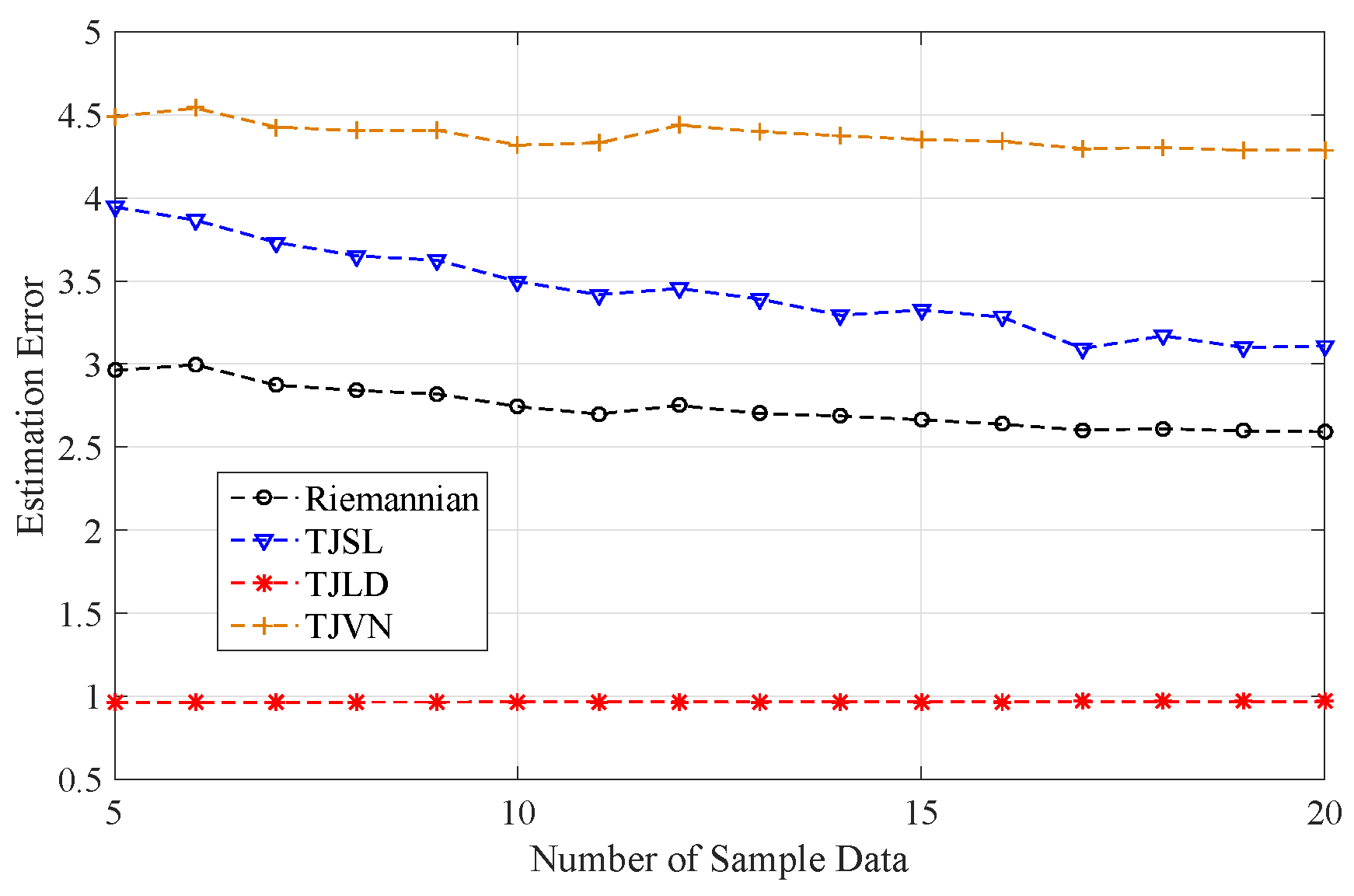
The number of samples varies from five to 20, and the number of pulses N is seven. A total of 100 times simulations are repeated to compute the average of the error value.
Figure 5 gives the plot of the estimation accuracy of the covariance matrix under different number of samples.
It is clear from
Figure 5 that the variance of estimation error is not obvious, as the number of samples varies. This means that the estimated matrix, that is the Riemannian mean, the TJSL median, the TJLD median, and the TJVN median, is robust with respect to the number of samples, especially the TJLD median. Moreover, it can be observed from
Figure 5 that the TJLD median has the lowest estimation error, followed by the Riemannian mean. The TJVN median has the maximal estimation error. However, the relationship of estimation error is not consistent with the detection performance which is illustrated in
Figure 4.
5.2. Real Clutter Data
To evaluate the performance of the proposed detectors in a real application situation, we use data collected by the McMaster University IPIX radar [
32]. Specifically, 19980205-192053-antstep.cdf (file 1), and 19980205-185111-antstep.cdf (file 2) [
33] are employed to test detection performances of our proposed detectors, Riemannian detector, and FFT-CFAR detection algorithm. For these two data files, the number of samples in the range dimension is 27, and the pulse dimension consists of 60,000 samples. The pulse repetition frequency is 1000 Hz, and the central frequency is
GHz. The horizontal polarization (HH) information of samples are considered. In particular, a synthetic target is needed to inject into one cell due to the unavailable target information, and the velocity is approximate constant,
m/s.
The dimension of the HPD matrix is 5, the threshold is set using the first pulse in each cell for . Other parameters are also as in the former subsection. The simulation is repeated 200 times to determine the Pd by means of the relative frequency.
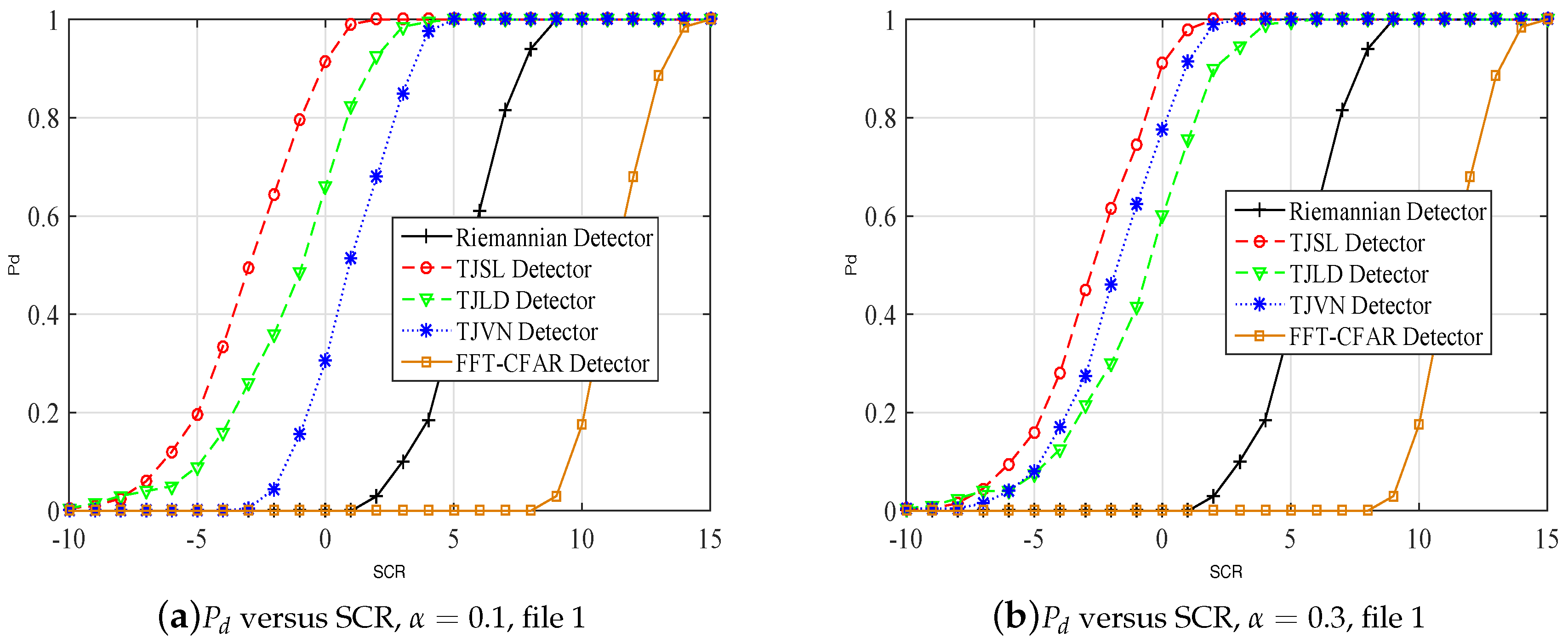
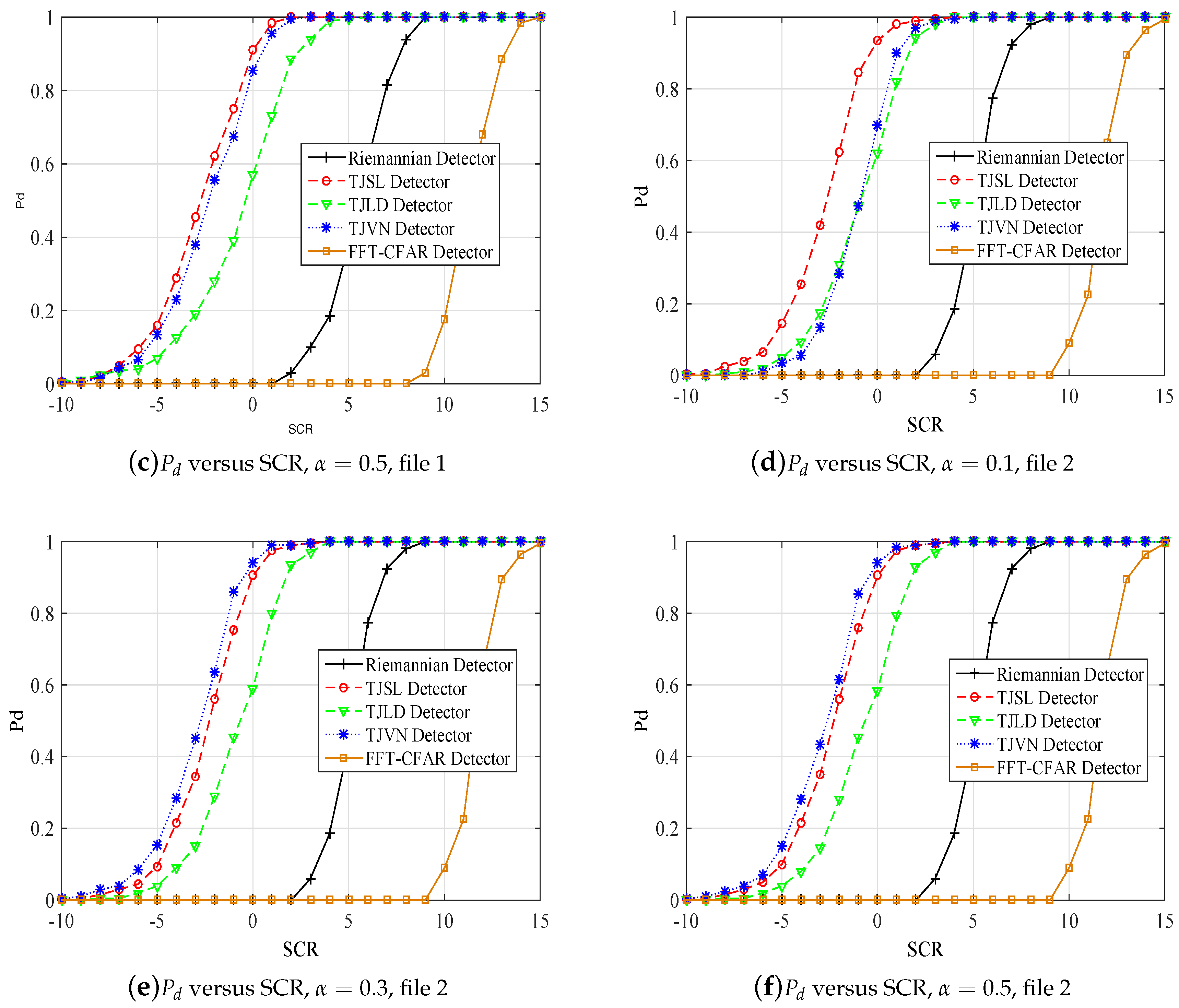
We compare the performance of our proposed detectors using the above two real sea clutter data. Plots of detection probability for different detectors are shown in
Figure 6. The
is set to
, and the range of SCR is between −10 and 15 dB. From
Figure 6, it is clear that our proposed detector and the Riemannian detector outperform the classical FFT-CFAR detection algorithm in real clutter environment. The detection performance of TJSL detector is the best in file1, and the performance of TJSL detector is comparable with the TJVN detector with
. Moreover, the results imply that our proposed detectors may have different performances in different real data files. The performance analysis of our proposed detectors under different clutter environments is needed in further work.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}






