MVMD-MOMEDA-TEO Model and Its Application in Feature Extraction for Rolling Bearings


Abstract
:1. Introduction
- (1)
- The method of MVMD based on scale segmentation is introduced to solve the problem of adaptive selection of mode parameter K for VMD decomposition.
- (2)
- The introduction of MOMEDA method not only overcomes the limitation of MCKD method, but also highlights the periodic impulse component of bearing fault vibration signal.
- (3)
- A new feature extraction method based on MVMD-MOMEDA-TEO is proposed to distinguish the running state of rolling bearings. It provides a new solution for condition monitoring and fault diagnosis of rolling bearings.
- (4)
- By using the measured data of four different types of bearing faults from two different sources (Case Western Reserve University (CWRU) and NASA), the comparative experimental analysis of the proposed method and MVMD-TEO method and MOMEDA-TEO method is completed, which validates the effectiveness and feasibility of the proposed method.
2. Core Methodology Introduction
2.1. MVMD Method
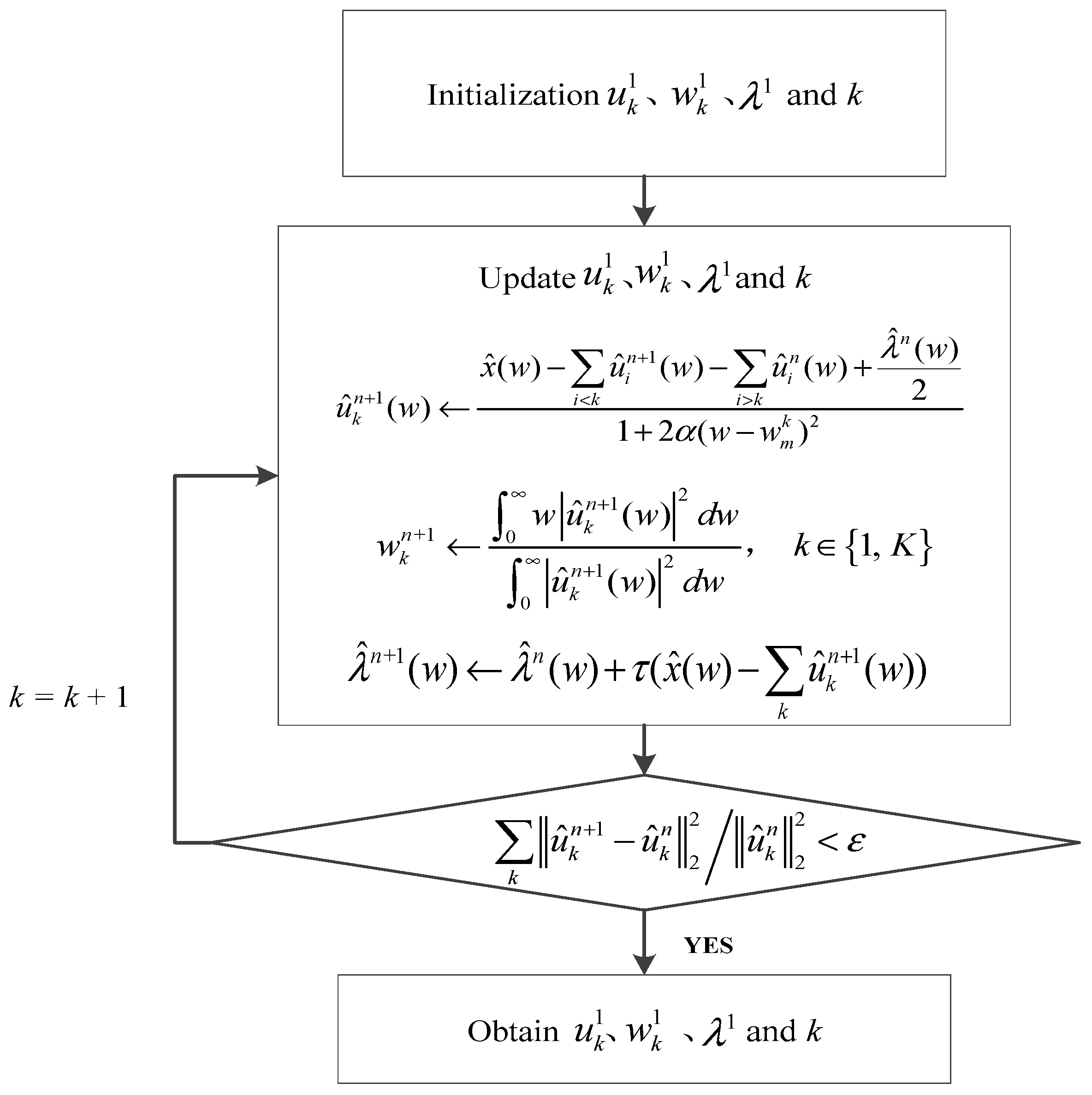
2.1.1. VMD
2.1.2. Scale Space Representation
2.2. MOMEDA Method
2.3. TEO Demodulation Principle
3. MVMD-MOMEDA-TEO Implementation Process
4. Comparative Analysis of Experiments
4.1. CWRU Rolling Bearing Vibration Data Analysis
4.1.1. The Feature Extraction of Outer Race Fault
Experiment of Outer Race Fault Feature Extraction Based on the MVMD-MOMEDA-TEO Method
Experiment of Outer Race Fault Feature Extraction Based on MOMEDA-TEO Method
4.1.2. The Feature Extraction of Inner Race Fault
Experiment of Inner Race Fault Feature Extraction Based on the MVMD-MOMEDA-TEO Method
Experiment of Inner Race Fault Feature Extraction Based on MOMEDA-TEO Method
4.2. NASA Rolling Bearing Vibration Data Analysis
4.2.1. The Feature Extraction of Outer Race Fault
Experiment of Outer Race Fault Feature Extraction Based on MVMD-MOMEDA-TEO Method
Experiment of Outer Race Fault Feature Extraction Based on MOMEDA-TEO Method
4.2.2. The Feature Extraction of Inner Race Fault
Experiment of Inner Race Fault Feature Extraction Based on MVMD-MOMEDA-TEO Method
Experiment of Inner Race Fault Feature Extraction Based on MOMEDA-TEO Method
5. Discussion and Conclusions
5.1. Discussion
- (1)
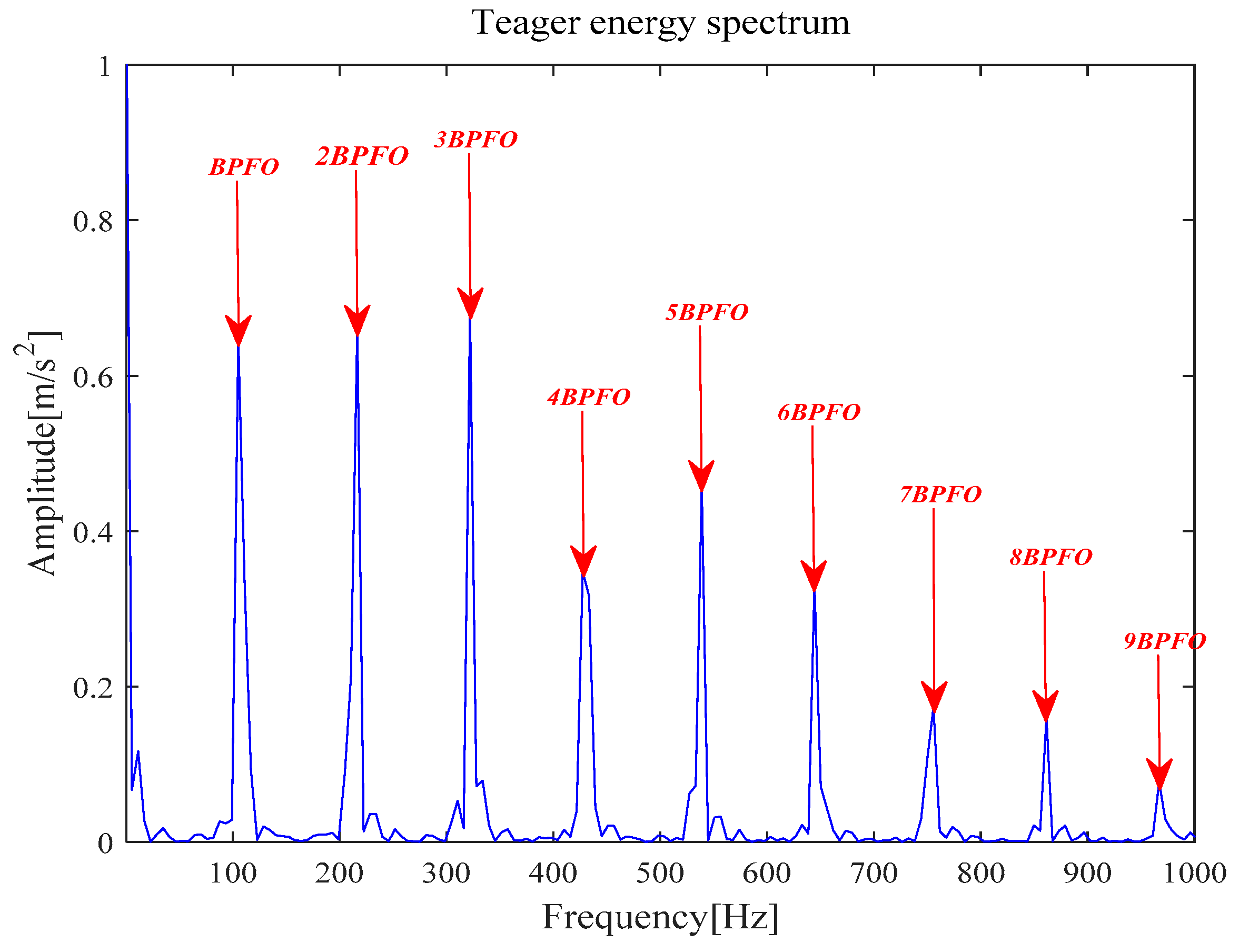
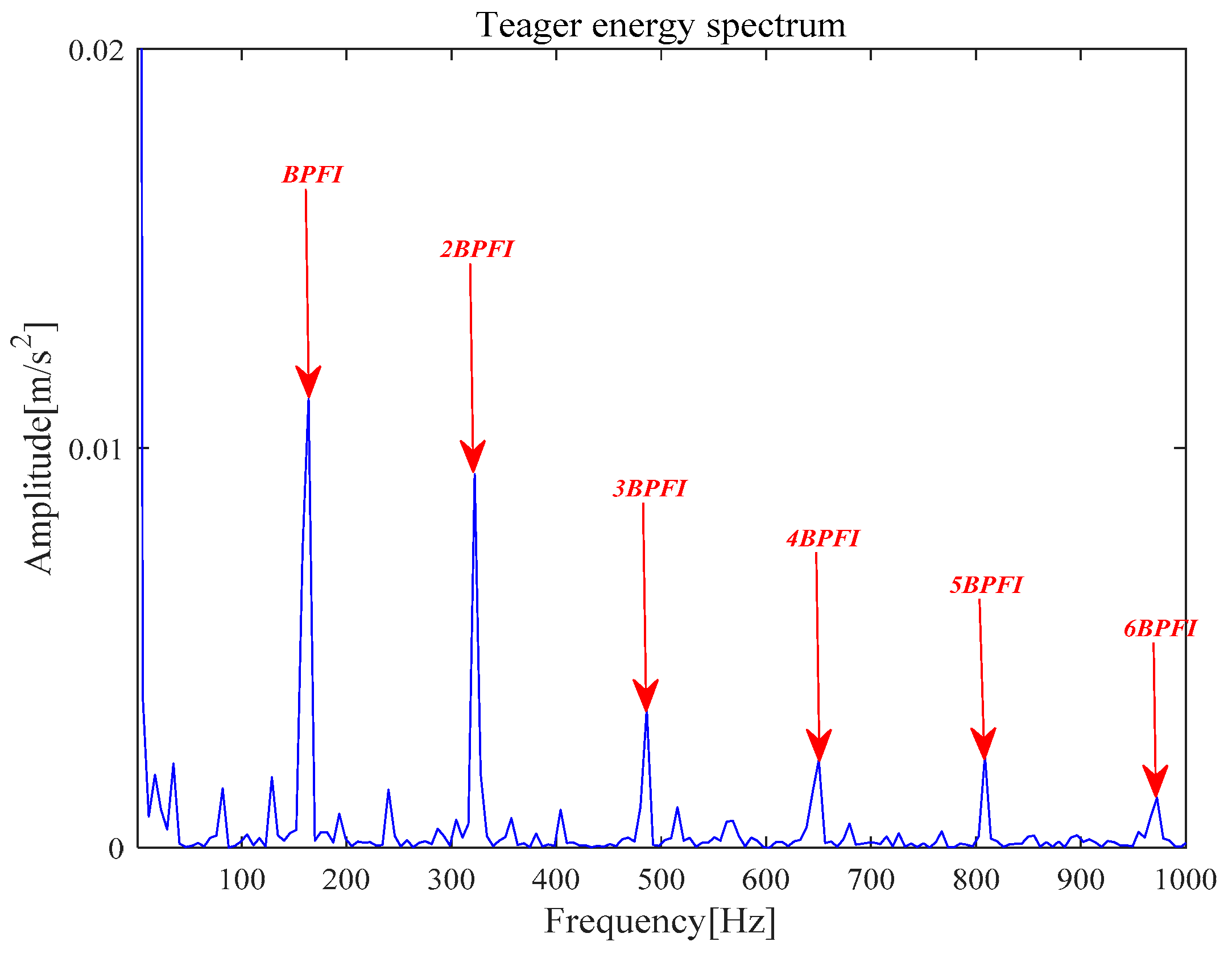
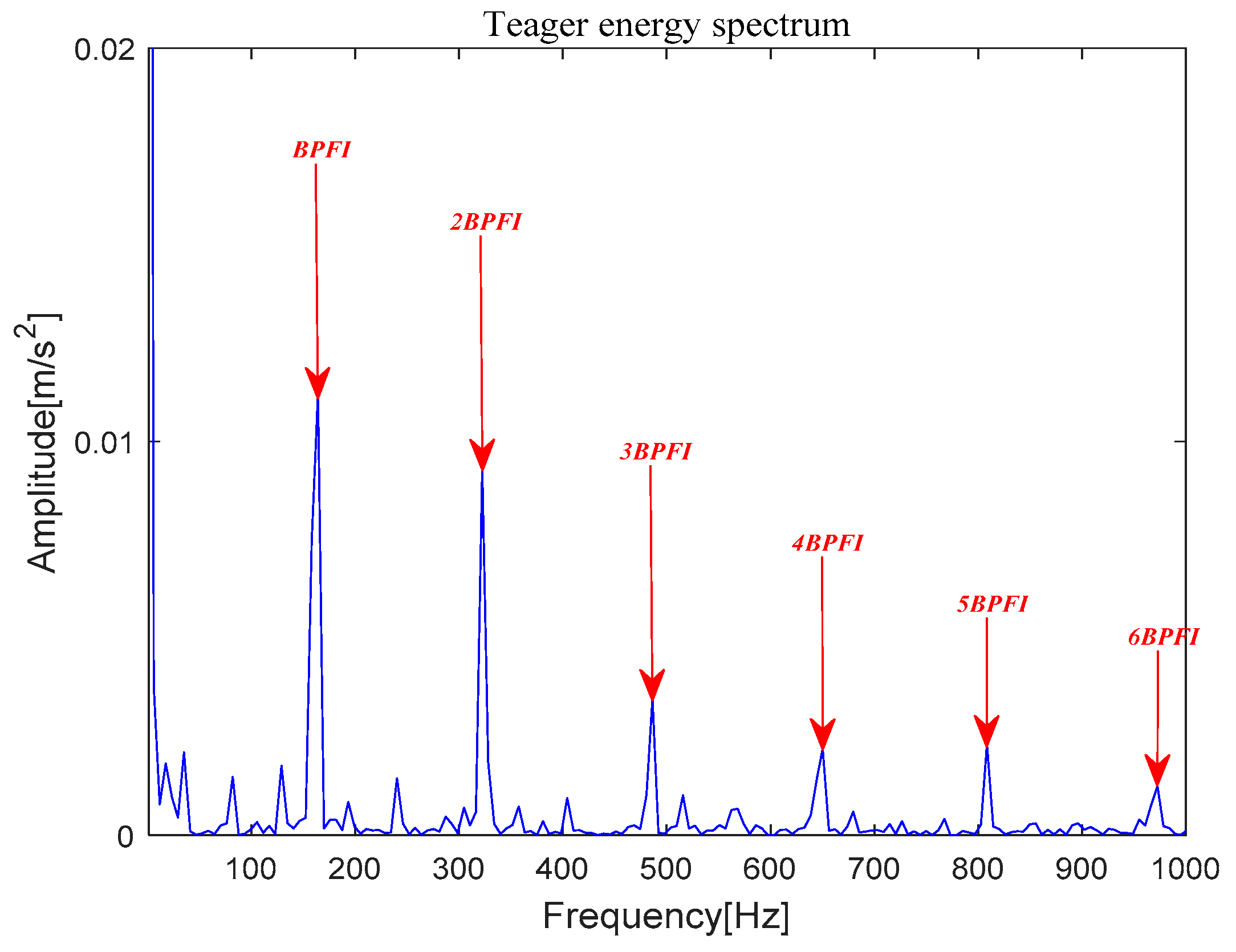
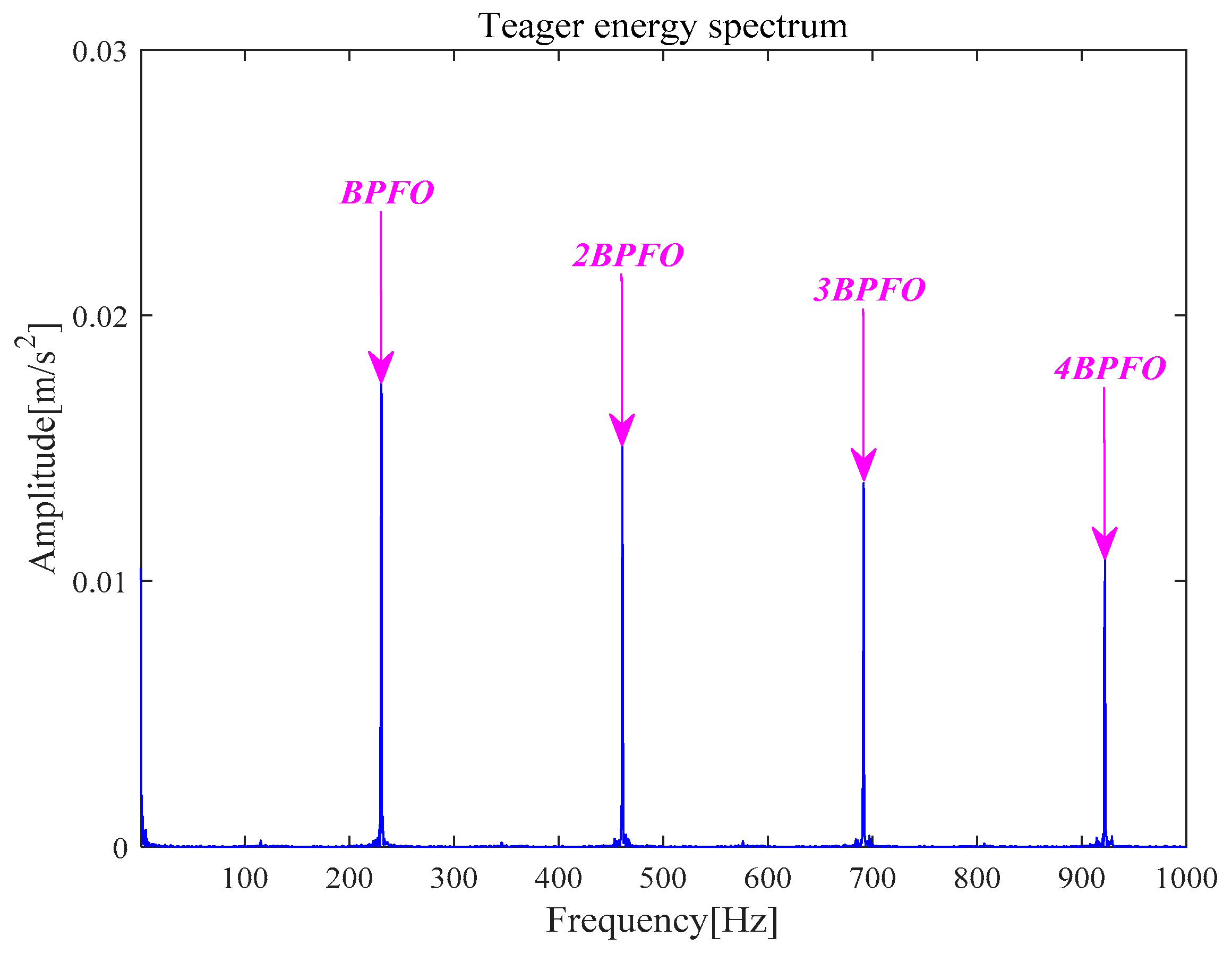
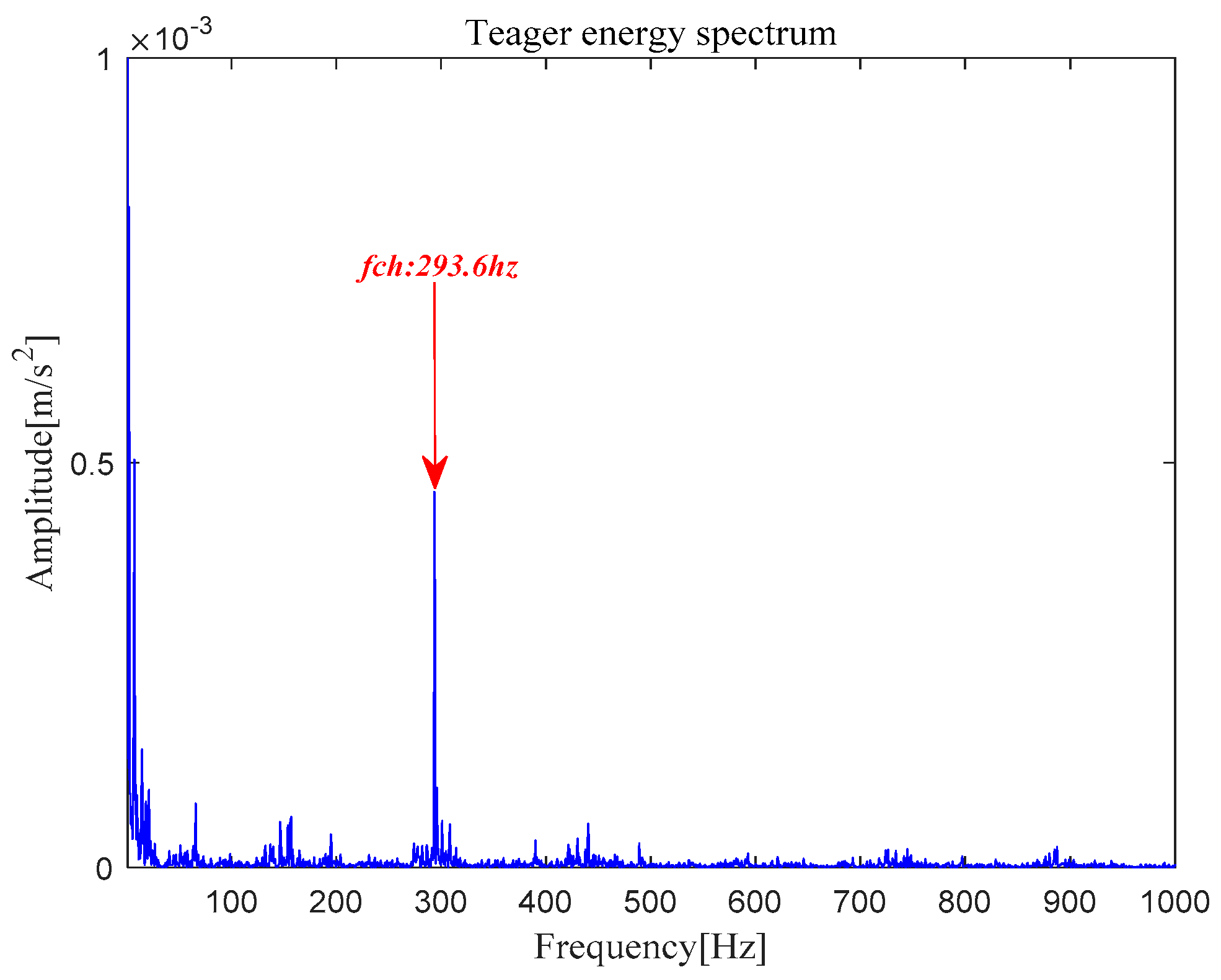
- The proposed MVMD-MOMEDA-TEO can achieve the same results as the other two methods, and can clearly identify the fault characteristic frequency (including frequency doubling features) of rolling bearings.
- (2)
- Compared with the other two methods, the results obtained by MVMD directly in Ref. [16] have a large number of noise signals in the Teager energy spectrum, which have a certain impact on fault feature extraction. Thus, MOMEDA of complex signals can enhance the impact part of signals.
- (3)
- Because the measured signal of NASA inner race contains not only noise interference, but also harmonic signal interference from the outer race and rolling body; the results obtained by MOMEDA method directly are compared with those of other two methods. Due to the signal decomposition process is not carried out, there is a problem that useful fault information will be filtered out together when filtering and denoising. Therefore, it is necessary to decompose the complex signal by MVMD method to extract useful information from the original signal.
- (4)
- By comparing the experimental results of the two groups of measured data, it can be seen that the MVMD-MOMEDA-TEO method can get a bit better or equivalent experimental results than the other two methods under strong noise interference, which proves the validity of the proposed method.
5.2. Conclusions
- (1)
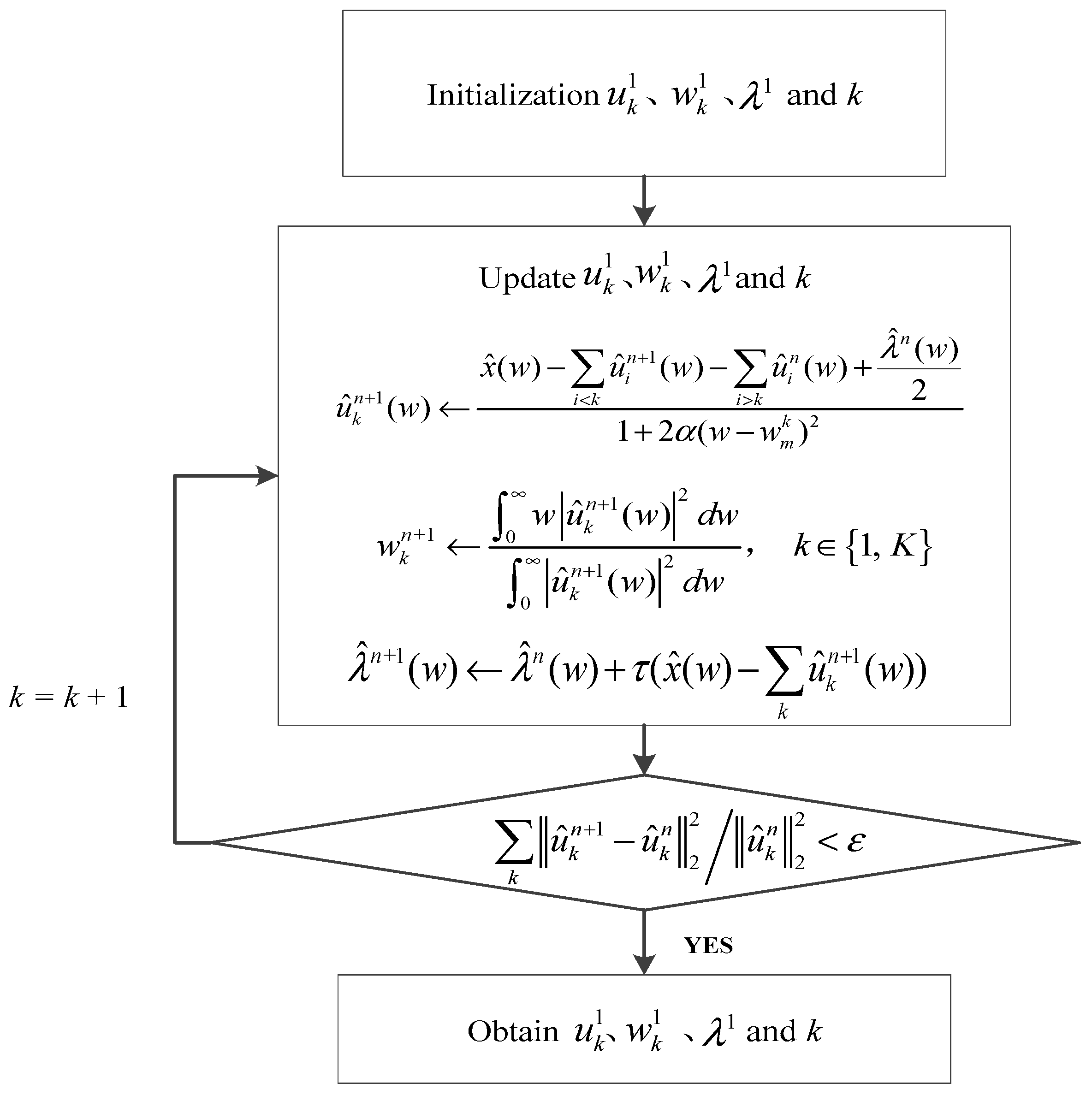
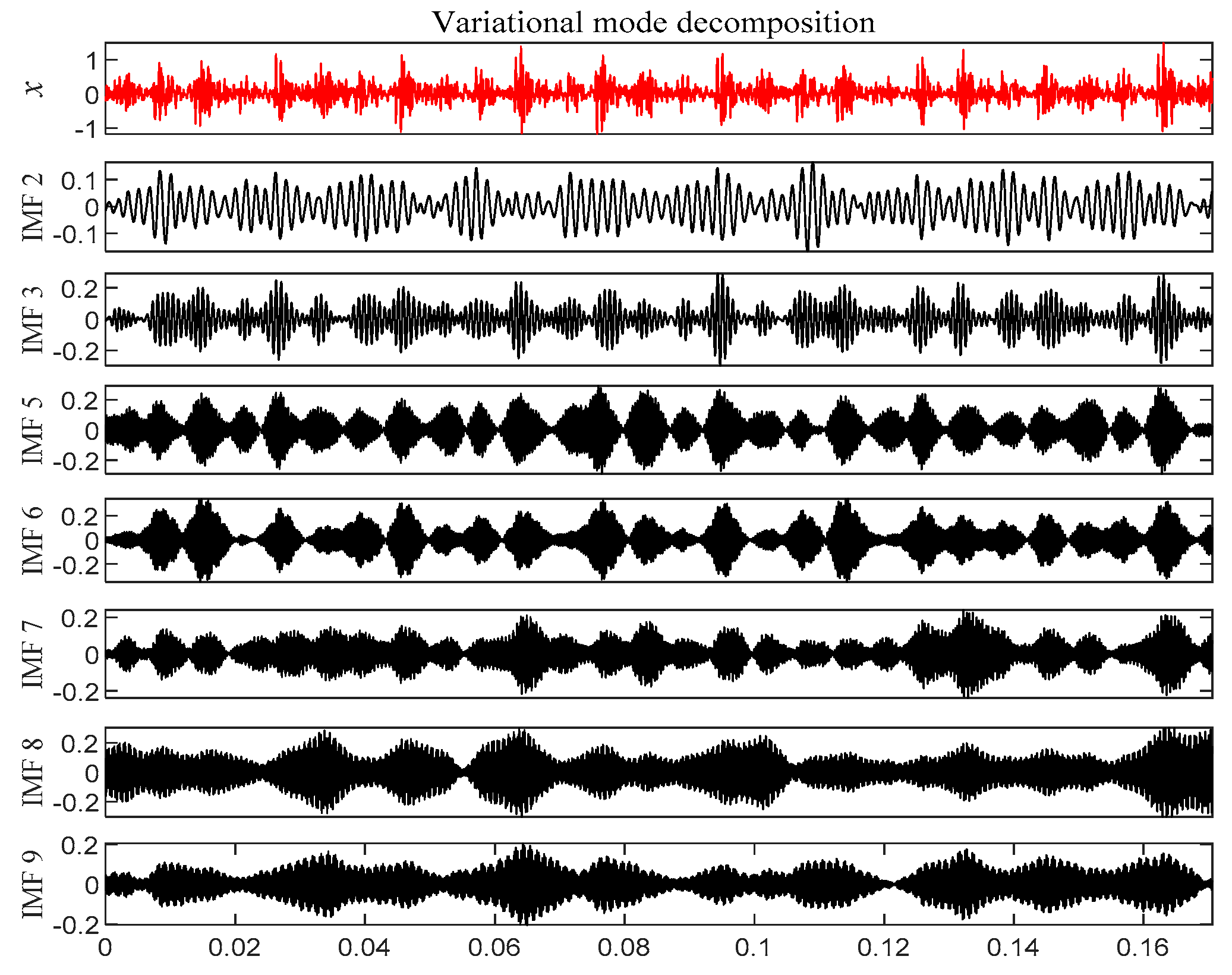
- Introducing the MVMD method self-adaptively choosing VMD decomposition mode number to realize fast self-adapting decomposition of signals. At the same time, introducing energy proportion index to extract effective decomposition components and reduce signal interference components.
- (2)
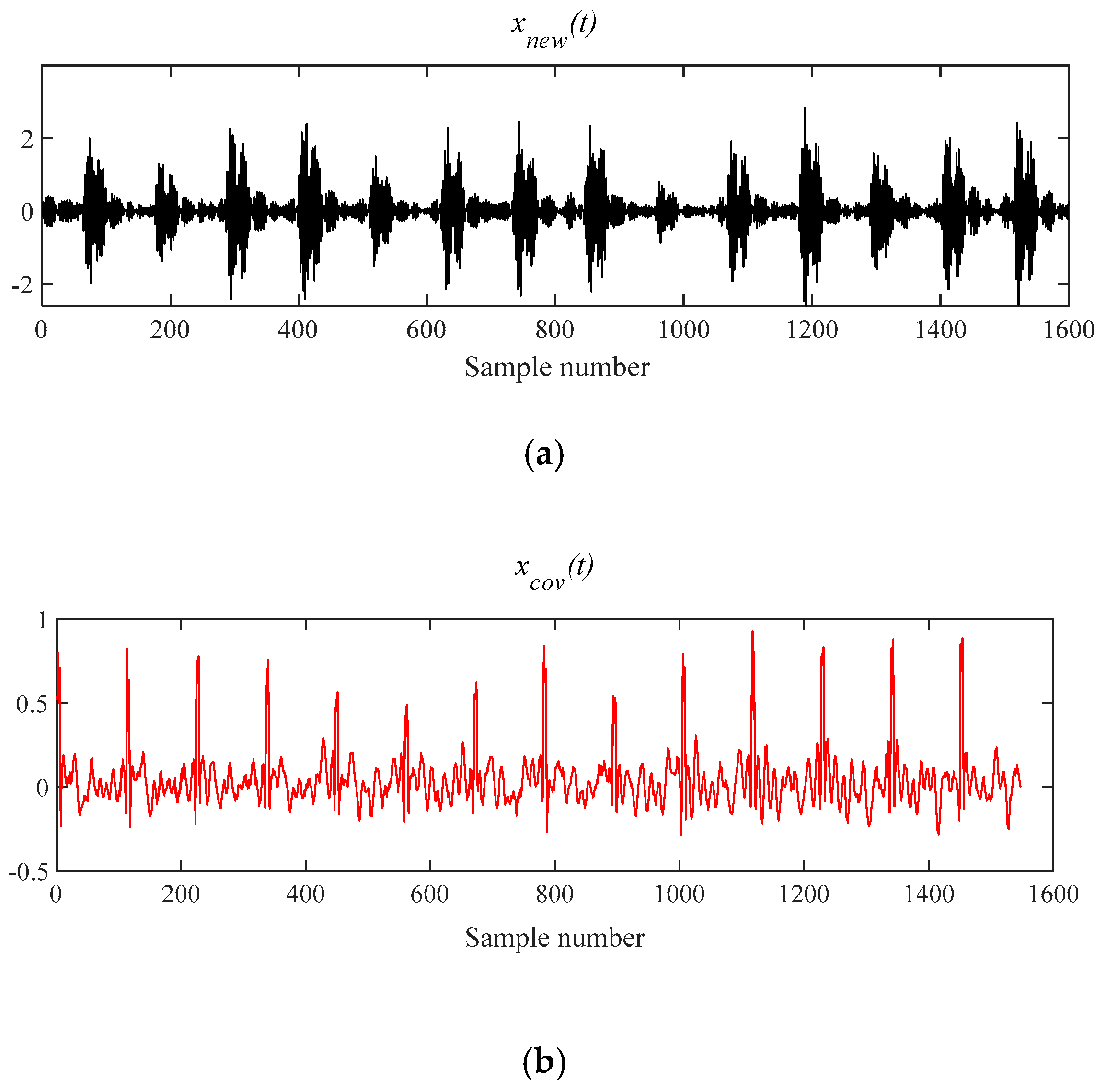
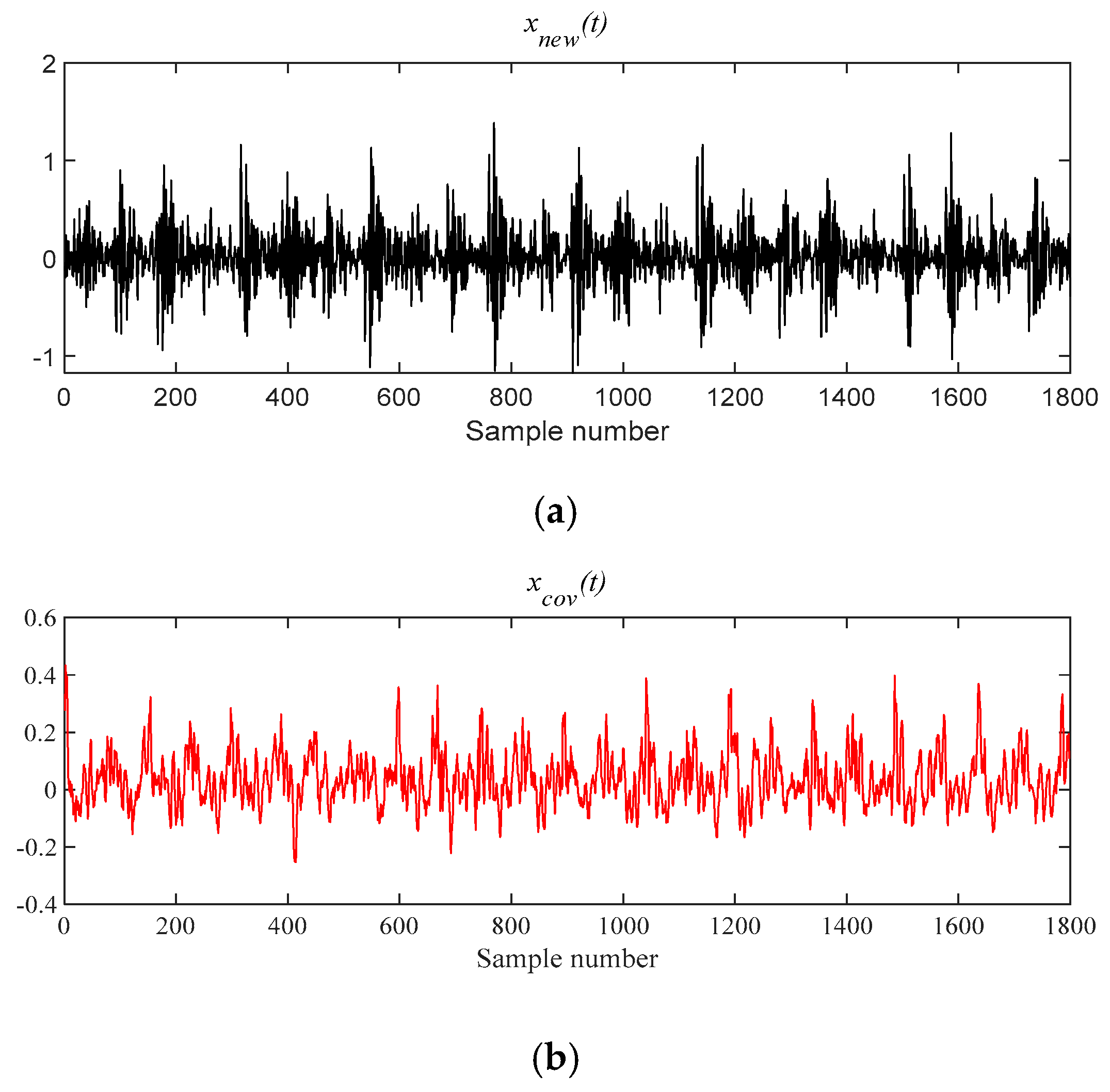
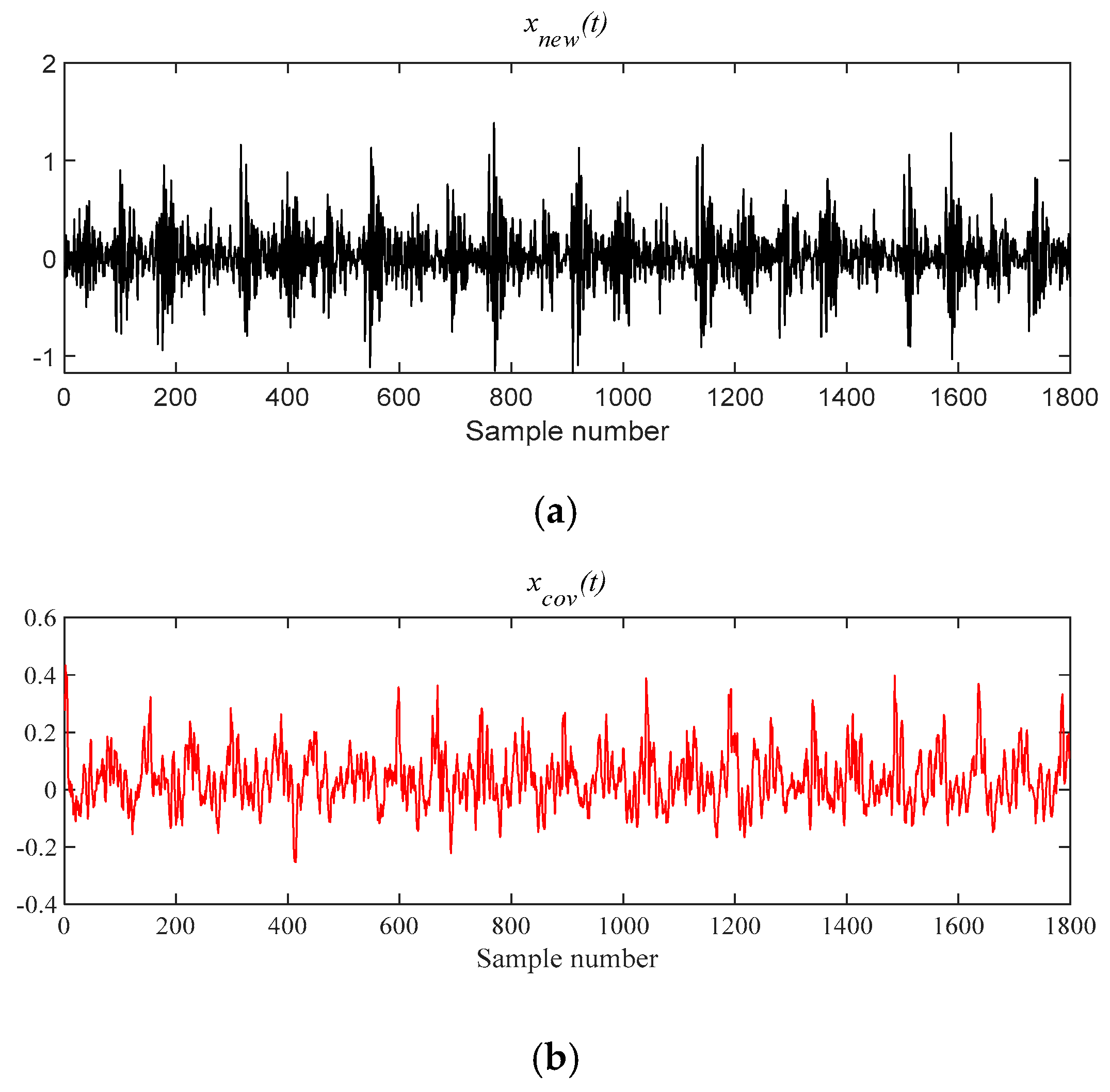
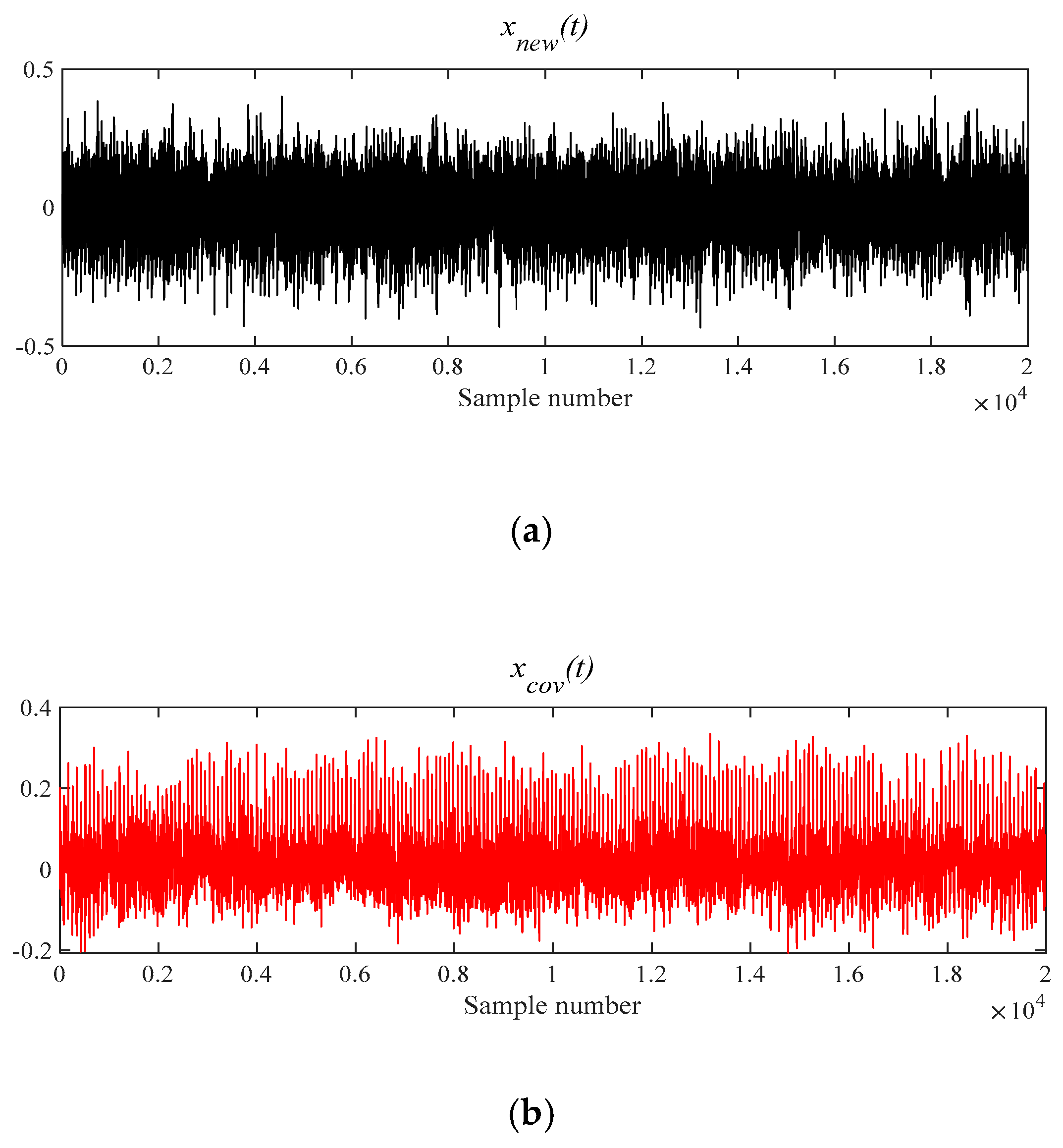
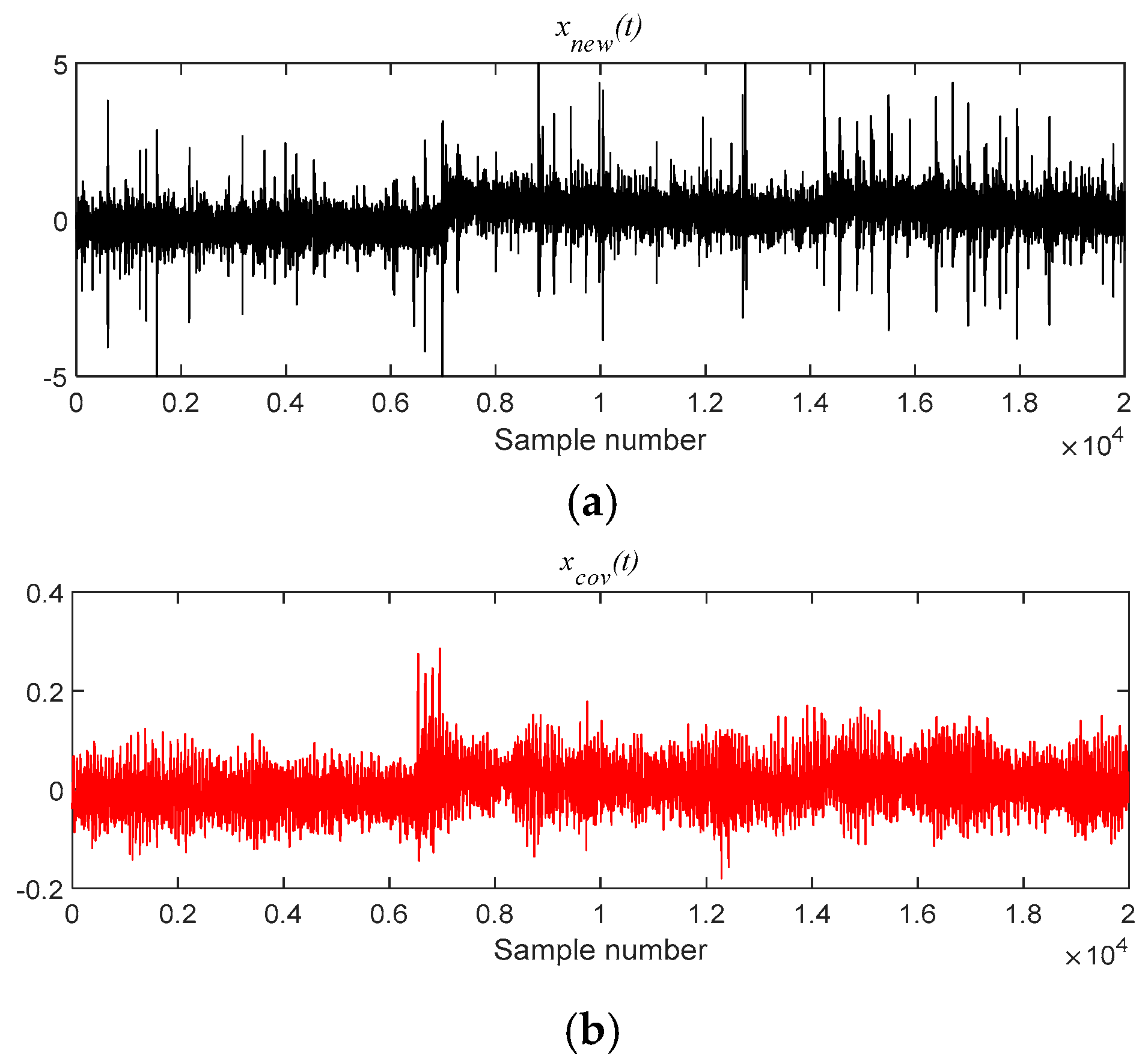
- The MOMEDA method is introduced to enhance the fault periodic pulse characteristics, and the Teager energy operator is introduced to analyze the envelope demodulation of deconvolution signal x_cov(t), which enhances the fault characteristic frequency of rolling bearings in the envelope spectrum.
- (3)
- Based on the vibration data of four different fault types from two different datasets of CWRU and NASA, the comparative experiments of MVMD-MOMEDA-TEO and MVMD-TEO, MOMEDA-TEO were carried out systematically, and the validity of the proposed method was demonstrated.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Wang, X. Reaserch on Blind Source Separation and Its Application in Rotating Machinery Fault Diagnosis; Yanshan University: Qinhuangdao, China, 2015. [Google Scholar]
- Cerrada, M.; Sánchez, R.V.; Li, C.; Pacheco, F.; Cabrera, D.; de Oliveira, J.V.; Vásquez, R.E. A review on data-driven fault severity assessment in rolling bearings. Mech. Syst. Signal Process. 2018, 99, 169–196. [Google Scholar] [CrossRef]
- Yu, J. Local and nonlocal preserving projection for bearing defect classification and performance assessment. IEEE Trans. Ind. Electron. 2012, 59, 2363–2376. [Google Scholar] [CrossRef]
- Rai, V.K.; Mohanty, A.R. Bearing fault diagnosis using FFT of intrinsic mode functions in Hilbert–Huang transform. Mech. Syst. Signal Process. 2007, 21, 2607–2615. [Google Scholar] [CrossRef]
- Antoni, J. The spectral kurtosis: A useful tool for characterising non-stationary signals. Mech. Syst. Signal Process. 2006, 20, 282–307. [Google Scholar] [CrossRef]
- Yang, D.M.; Stronach, A.F.; MacConnell, P.; Penman, J. Three-order spectral techniques for the diagnosis of motor bearing condition using artificial neural networks. Mech. Syst. Signal Process. 2002, 16, 391–411. [Google Scholar] [CrossRef]
- Yunusa-Kaltungo, A.; Sinha, J.K.; Nembhard, A.D. Use of composite higher order spectra for faults diagnosis of rotating machines with different foundation flexibilities. Measurement 2015, 70, 47–61. [Google Scholar] [CrossRef]
- Mallat, S.G. A theory for multiresolution signal decomposition: The wavelet representation. IEEE Trans. Pattern Anal. Mach. Intell. 1989, 11, 674–693. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Smith, J.S. The local mean decomposition and its application to EEG perception data. J. R. Soc. Interface 2005, 2, 443–454. [Google Scholar] [CrossRef] [PubMed]
- Dragomiretskiy, K.; Zosso, D. Variational mode decomposition. IEEE Trans. Signal Process. 2014, 62, 531–544. [Google Scholar] [CrossRef]
- Zhang, M.; Jiang, Z.; Feng, K. Research on variational mode decomposition in rolling bearings fault diagnosis of the multistage centrifugal pump. Mech. Syst. Signal Process. 2017, 93, 460–493. [Google Scholar] [CrossRef]
- Gupta, K.K.; Raju, K.S. Bearing fault analysis using variational mode decompositon. In Proceedings of the 9th International Conference on Industrial and Information Systems (ICIIS), Gwalior, India, 15–17 December 2014; pp. 1–6. [Google Scholar]
- Ma, Z.; Li, Y.; Liu, Z.; Guang, C. Rolling bearings’fault feature extraction based on variational mode decomposition and Teager energy operator. J. Vib. Shock 2016, 35, 134–139. [Google Scholar]
- Li, Z.; Chen, J.; Zi, Y.; Pan, J. Independence-oriented VMD to identify fault feature for wheel set bearing fault diagnosis of high speed locomotive. Mech. Syst. Signal Process. 2017, 85, 512–529. [Google Scholar] [CrossRef]
- Ma, J.; Wu, J.; Wang, X. Incipient fault feature extraction of rolling bearings based on the MVMD and Teager energy operator. ISA Trans. 2018, 80, 297–311. [Google Scholar] [CrossRef] [PubMed]
- Wiggins, R.A. Minimum entropy deconvolution. Geoexploration 1978, 9, 21–35. [Google Scholar] [CrossRef]
- Endo, H.; Randall, R.B. Enhancement of autoregressive model based gear tooth fault detection technique by the use of minimum entropy deconvolution filter. Mech. Syst. Signal Process. 2007, 21, 906–919. [Google Scholar] [CrossRef]
- Sawalhi, N.; Randall, R.B.; Endo, H. The enhancement of fault detection and diagnosis in rolling element bearings using minimum entropy deconvolution combined with spectral kurtosis. Mech. Syst. Signal Process. 2007, 21, 2616–2633. [Google Scholar] [CrossRef]
- Ren, X.; Li, P.; Wang, C. Weak fault feature extration of rolling bearing based on VMD and MED. Mod. Manuf. Eng. 2018, 3, 143–148. [Google Scholar]
- Wang, J.; Chen, S.; Zhang, C. Application and Research of VMD and MCKD in Bearing Fault Diagnosis. Modul. Mach. Tool Autom. Manuf. Tech. 2017, 5, 69–72. [Google Scholar]
- Xia, J.; Zhao, L.; Bai, Y.; Yu, M.; Wang, Z. Feature extraction for rolling element bearing weak fault based on MCKD and VMD. J. Vib. Shock 2017, 36, 78–83. [Google Scholar]
- Mcdonald, G.L.; Zhao, Q. Multipoint Optimal Minimum Entropy Deconvolution and Convolution Fix: Application to vibration fault detection. Mech. Syst. Signal Process. 2016, 82, 461–477. [Google Scholar] [CrossRef]
- Pan, J.; Chen, J.; Zi, Y.; Li, Y.; He, Z. Mono-component feature extraction for mechanical fault diagnosis using modified empirical wavelet transform via data-driven adaptive Fourier spectrum segment. Mech. Syst. Signal Process. 2016, 72–73, 160–183. [Google Scholar] [CrossRef]
- Mcdonald, G.L.; Zhao, Q.; Zuo, M.J. Maximum correlated Kurtosis deconvolution and application on gear tooth chip fault detection. Mech. Syst. Signal Process. 2012, 33, 237–255. [Google Scholar] [CrossRef]
- Wang, T.; Feng, Z.; Hao, R.; Chu, F. Fault diagnosis of rolling element bearings based on Teager energy operator. J. Vib. Shock 2012, 31, 1–5. [Google Scholar]
- Loparo, K. Bearings Vibration Data Set. Case Western Reserve University. Available online: http://csegroups. case.edu/bearingdata center/pages/download-data-file (accessed on 27 March 2019).
- Lee, J.; Qiu, H.; Yu, G.; Lin, J. Rexnord Technical Services. IMS. In University of Cincinnati. “Bearing Data Set”. NASA Ames Prognostics Data Repository, NASA Ames Research Center: Moffett Field, CA, USA, 2007. Available online: https://ti.arc.nasa.gov/project/prognostic-data-repository/ (accessed on 27 March 2019).






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Rolling Element Number (Z) | Inner Diameter (inches) | Outer Diameter (inches) | Contact Angle (θ) | Rolling Element Diameter d (inches) | Pitch Circle Diameter D (inches) | Speed (rpm) |
|---|---|---|---|---|---|---|---|
| 6205-2RSJEMSKF | 9 | 0.9843 | 2.0472 | 0° | 0.3126 | 1.537 | 1797 |
| Decomposed Component | IMF1 | IMF2 | IMF3 | IMF4 | IMF5 | IMF6 | IMF7 | IMF8 | IMF9 | IMF10 |
|---|---|---|---|---|---|---|---|---|---|---|
| E(t) | / | 0.01 | 0.05 | 0.12 | 0.11 | 0.25 | 0.29 | 0.16 | / | 0.01 |
| Decomposed Component | IMF1 | IMF2 | IMF3 | IMF4 | IMF5 | IMF6 |
| E(t) | 0.01 | 0.06 | 0.12 | 0.03 | 0.16 | 0.21 |
| Decomposed Component | IMF7 | IMF8 | IMF9 | IMF10 | IMF11 | |
| E(t) | 0.09 | 0.11 | 0.08 | 0.02 | 0.01 |
| Rolling Element Number (Z) | Contact Angle (θ) | Rolling Element Diameter d (mm) | Pitch Diameter D (mm) | Rotational Speed (rpm) |
|---|---|---|---|---|
| 16 | 15.17° | 0.331 | 2.815 | 2000 |
| Decomposed Component | IMF1 | IMF2 | IMF3 | IMF4 | IMF5 | IMF6 |
| E(t) | 0.02 | 0.07 | 0.05 | 0.10 | 0.09 | 0.33 |
| Decomposed Component | IMF7 | IMF8 | IMF9 | IMF10 | IMF11 | IMF12 |
| E(t) | 0.21 | 0.09 | 0.02 | 0.01 | 0.01 | / |
| Decomposed Component | IMF1 | IMF2 | IMF3 | IMF4 | IMF5 | IMF6 |
| E(t) | 0.38 | 0.03 | 0.03 | 0.04 | 0.09 | 0.07 |
| Decomposed Component | IMF7 | IMF8 | IMF9 | IMF10 | IMF11 | IMF12 |
| E(t) | 0.18 | 0.06 | 0.03 | 0.03 | 0.02 | 0.04 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Ma, J.; Wang, X.; Wu, J. MVMD-MOMEDA-TEO Model and Its Application in Feature Extraction for Rolling Bearings. Entropy 2019, 21, 331. https://doi.org/10.3390/e21040331
Li Z, Ma J, Wang X, Wu J. MVMD-MOMEDA-TEO Model and Its Application in Feature Extraction for Rolling Bearings. Entropy. 2019; 21(4):331. https://doi.org/10.3390/e21040331
Chicago/Turabian StyleLi, Zhuorui, Jun Ma, Xiaodong Wang, and Jiande Wu. 2019. "MVMD-MOMEDA-TEO Model and Its Application in Feature Extraction for Rolling Bearings" Entropy 21, no. 4: 331. https://doi.org/10.3390/e21040331
APA StyleLi, Z., Ma, J., Wang, X., & Wu, J. (2019). MVMD-MOMEDA-TEO Model and Its Application in Feature Extraction for Rolling Bearings. Entropy, 21(4), 331. https://doi.org/10.3390/e21040331