1. Introduction
Disturbances in production work have been modelled previously in manufacturing [
1,
2] and in construction [
3,
4]. However, previous modelling has been concerned with autonomous systems [
1,
2,
3,
4]. Rather than disturbances in production that involves interactions between different types of work and different types of workers. Our own previous work has encompassed different types of work and different types of workers, but not disturbances in production [
5,
6]. In this paper, five contributions are made to address this shortcoming in the previous work. First, a heuristic framework for modelling disturbances and their effects is provided. The heuristic framework encompasses Markov processes, the theory of perturbations, and calculus of variations. Second, formulae and ratios are provided for heuristic modelling of effects on internal action (
Sint) from disturbances to psychomotor work. Third, formulae and ratios are provided for heuristic modelling effects on external action (
Se). Fourth, examples are provided of heuristic modelling of disturbances in psychomotor work. Fifth, examples show how task complexity can be modelled heuristically in terms of microstates across the cyber domain and the physical domain of cyber-physical systems. Together, these contributions enable heuristic modelling of effects from disturbances on interactions between diverse psychomotor work and workers: rather than on autonomous systems [
1,
2,
3,
4].
The study reported here builds upon research reported in two previous papers in Entropy. The first paper [
5] provided an explanation of how resources for physical production work, such as work instructions, product components, and workstations, can be carriers of situated information, and also carriers of various types of situated entropy. The second paper [
6] expanded upon this [
5] by generalizing from examples to the three categories of work setting, work composition, and work uncertainty, and to three aspects of worker action: positioning, performing, and perfecting. In addition, details were provided about the state-of-the-art for psychomotor capabilities of human, cyborgs, and robot workers. Moreover, the principle of least psychomotor action (PLPA) was introduced as follows: the preferred combination of worker types is that which can carry out psychomotor work with the least internal action (
Sint) and least external action (
Se). Here, cyborgs are humans who are enhanced by permanent implanting or persistent wearing of work technologies [
7,
8,
9,
10,
11,
12,
13]. As shown in
Table 1, implanting or wearing of work technologies, such as exoskeletons, can introduce new sources of disturbances and affect the action required to carry out work.
Together with references to relevant theory [
14,
15,
16,
17],
Table 1 provides a summary of variables and examples of disturbances in psychomotor work. For example, there can be disturbances arising from workers affected by fatigue, exoskeleton misalignment, sensor error, etc. Also, disturbances can arise from work settings amongst erratic weather conditions, from work compositions that include natural materials with unique grain patterns, and from work characterized by the uncertainty of customer-led design, such as inconsistent interfaces between one-of-a-kind components. Instances of such disturbances are bounded, and conform to conceptualization of disturbances in systems theory. In particular, low frequency of recurrence, low temporal predictability, and production of significant deviation from normal state [
18,
19].
The remainder of the paper comprises five further sections. Next, in
Section 2, the heuristic framework is introduced. Then, in
Section 3 and
Section 4, formulae and ratios are introduced for heuristic modelling of
Sint and for heuristic modelling of
Se. Subsequently, in
Section 5, examples are provided. In conclusion, principal findings, implications, limitations, and directions for further research are discussed in
Section 6.
5. Examples
In this section, examples are provided of application of the heuristic framework explained above in
Section 2,
Section 3 and
Section 4. As is appropriate in rule-of-thumb heuristics, we perform qualitative analysis of
Sint and
Se that includes the ratios described above to express fundamental differences between worker types.
Sint and
Se are considered separately because of the huge difference in their orders of magnitude. In particular,
Sint is miniscule compared to
Se. Hence, it is not practical to sum
Sint and
Se for individual calculations because one worker type’s much better
Sint will always be overridden by another worker type’s slightly better
Se. However,
Sint is not trivial because the combined total of
Sint across millions of workplaces throughout the world is huge. Accordingly, it is important to compare
Sint for different worker types.
The examples follow four steps: calculate
and
; calculate
Sint; calculate
Se; compare
Sint and
Se between worker types to identify worker type with lowest
S. The first step involves consideration of task complexity as expressed with probability mass functions. This is simply done when the number and probability of different ways of working are expressed as fractions, such as 4/6, 1/6, 1/6 [
5]. For example, it can be done when an expert team meets to discuss several alternative production investment options but the exact performance of each option cannot be predicted accurately in advance. Such potential production options are common and include building entirely new factories and deploying emerging cyborg technologies. Here, as is common with rule-of-thumb heuristics [
41,
42], the expert team comprising production engineer, production manager, financial manager, etc., bring their specialist knowledge to bear when considering alternative production options. In the first step, this expertise is applied to express the complexity of positioning, performing, and perfecting actions in a task before disturbance
and after disturbance
In the second step, the rule-of-thumb ratios are applied to the calculation of
Sint. In the third step, the rule-of-thumb ratios are applied to the calculation of
Se. The fourth step is to compare
Sint and
Se between worker types.
Table 3 provides summary of calculations in accordance with Equation (25)
Sint for human worker can be calculated with Equation (28) as follows
(1 × 5.32) × (5.32 × (10000 − 0))
5.32 × 53200
283024
Sint for cyborg worker can be calculated with Equation (28) as follows
(1.2 × 5.32) × (5.32 × (12000 − 0))
6.38 × 76608
488759
Sint for robot worker can be calculated with Equation (28) as follows
(10000 × 5.32) × (5.32 × (1 − 0))
53200 × 5.32
283024
In this example, where h(Q) is the same for all types of workers, Sint is equal for human worker and robot worker, because the differences in their respective ratios for power consumption (1/10,000) and processing time (10,000/1) balance each other. Si is higher for the cyborg worker due to the higher ratio for power consumption (1/1.2/10,000) and for processing time (10,000/12,000/1).
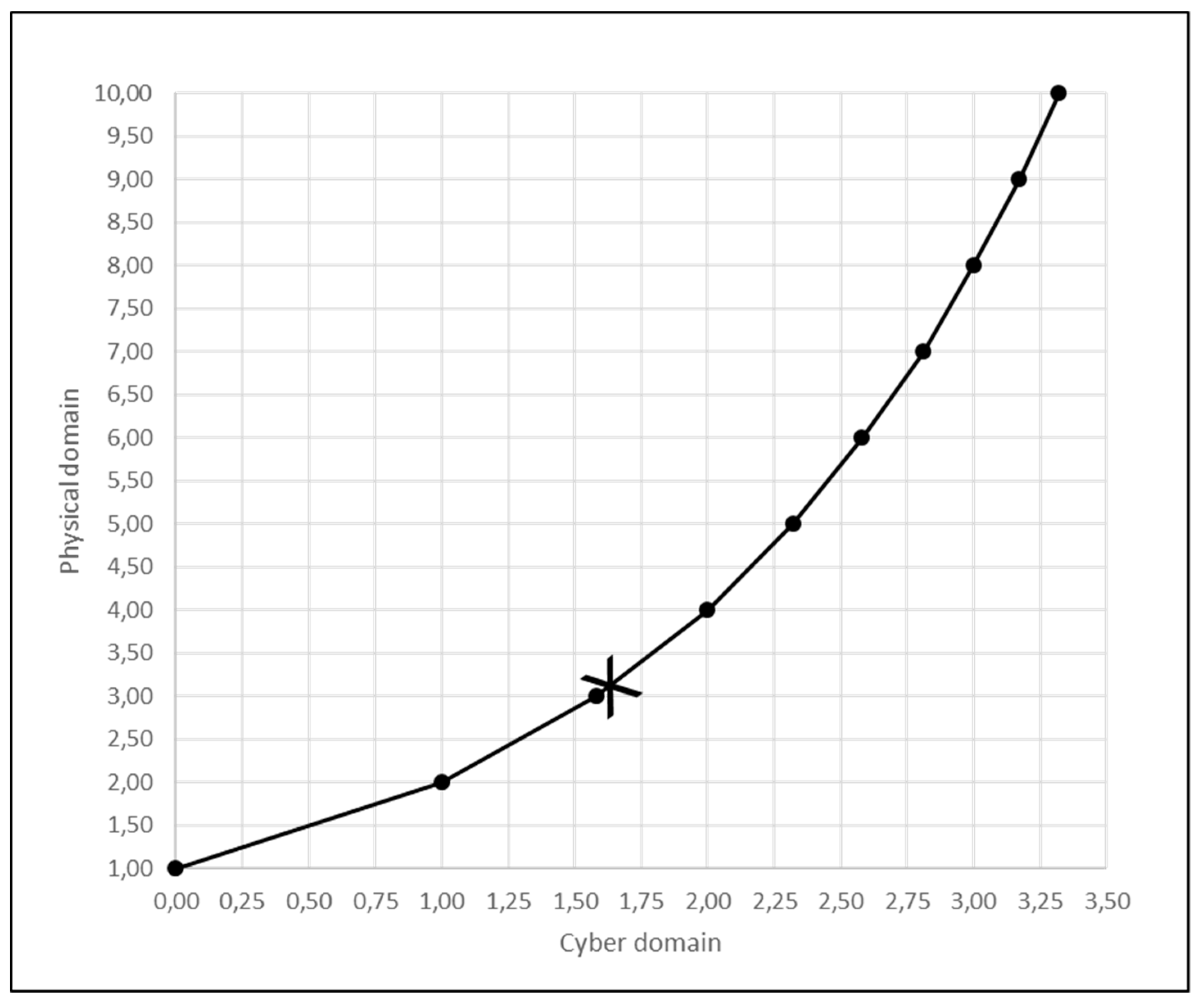
When calculating
we add S
e for work carried out in flow state up to the additional S
e involved in extra (
) work arising from the disturbance. For human worker
can be calculated for Equation (43) with reference to the chart in
Figure 5 below as follows:
2^(3.74) + 0.5[2^(4.90) − 2^(3.74)]
13.36 + 0.5(29.85 − 13.36)
13.36 + 8.245
21.61
for cyborg worker can be calculated for Equation (43) with reference to
Figure 5 below as follows
2^(3.74) + 0.5[2^(4.90) × 1.1 − 2^(3.74)]
13.36 + 0.5[(29.85 × 1.1) − 13.36]
13.36 + 0.5[32.84 − 13.36]
13.36 + 0.5[19.47]
13.36 + 9.738
23.10
for robot worker can be calculated for Equation (43) with reference to
Figure 5 below as follows
2^(3.74) + 0.5[2^(4.90) × 1.5 − 2^(3.74)]
13.36 + 0.5[(29.85 × 1.5) − 13.36]
13.36 + 0.5[44.78 − 13.36]
13.36 + 0.5[31.41]
13.36 + 15.71
29.07
In this example, where work complexity is the same for all types of workers, Se is lowest for the human worker and highest for the robot worker due to their respective motion ratios (1/1.5).
However, it cannot be assumed that work complexity will always be the same for all worker types. Rather, work settings, work composition, and work uncertainty need to be engineered to minimize the effects from disturbances for different types of workers.
For example, a human worker’s re-positioning actions can involve automaticity in the highly flexible deployment of general psychomotor abilities. Re-positioning actions can involve known solutions, comprising gross and fine general psychomotor abilities, which enable the human worker to move forward fluidly to get into position. For a cyborg worker, such as a human wearing a motorized exoskeleton, increased strength and endurance from wearable mechatronics can be offset by reduced biomechanical flexibility. For example, the exoskeleton framework can restrict medial and lateral rotation [
107]. This can lead to the cyborg worker moving forward into position with more separate discrete motions than the human worker. For robot workers, re-positioning actions involve breaking down a desired movement into discrete motions that satisfy movement constraints while seeking to optimize movement. However, robot chassis do not have the flexibility of the human body nor the human body when restricted by the wearing of an exoskeleton. For example, as formalized in standard robot motion challenges, such as The Piano Mover’s Problem, robot maneuvering to get into position within workspaces that include corners involves more choke iterations than continuous flow, as robots move backwards as well as forwards in order to make adjustments in direction [
108]. Accordingly, from one disturbance there will be fewest individual discrete positioning actions, and most continuous fluid positioning actions, from the human worker. The number of re-positioning iterations is influenced by work setting. Consider, for example, the disturbance of an agricultural worker falling down on sloping ground that has become slippery and undulating from combinations of heavy rainfall and worker traffic. A human worker can readily deploy general psychomotor ability known solutions developed through play and sport while growing up. Accordingly, few iterations of applying known solutions are required. Iterations of applying known solutions will be higher for the cyborg worker when there are misalignments between the human body and the exoskeleton framework, which have not been experienced before. As summarized in
Table 4, for the robot worker, there will be more iterations because of the number of discrete actions needed to reestablish an upright position on slippery sloping ground, where the use of mechanical claws, etc., can be counterproductive, as they churn up the soft ground making it less stable. This example illustrates the need to focus engineering work, such as the engineering of work settings for robot implementations, on reducing effects from disturbances. If necessary engineering work is neither feasible nor viable, then worker types should not be those for which disturbances will lead to large increases of
Sint and Se. As shown in
Table 4, the differences between worker types can be so large that detailed calculations of
Sint and
Se are not required.
For workers, performing actions involve applying known solutions comprising different levels of psychomotor work skills schema. The higher the level of known solution that can be applied, the lower can be the number of iterations required following disturbance because the final deviation from optimal solution. However, some types of psychomotor work inevitably require application of low level work skills schema.
For example, clothing production involves shaping materials through cutting and forming parts through sewing. This is because the production of soft products such as clothing is not suited to parts consolidation techniques, which involve integration of many loose small parts into a few large assemblies [
109]. Similarly, rework of soft products involves low-level work skills schema. For example, incorrect stitching needs to be pulled out and resewn. The number of iterations of rework required by different types of workers is influenced by work composition. A human worker will work with cloths that have long-established textile properties, including unpredictable distortions throughout manufacturing. By contrast, cloths used by robot workers can be stiffened temporarily by being drenched in a liquid thermoplastic solution. Robots worker, which lack human dexterity in handling unpredictable textile deformations, can then sew and shape the stiffened textile. When manufacturing is complete, the cloth in the completed apparel is washed with warm water and becomes soft once again. As well as simplifying sewing, the temporary rigidity of the textile can simplify resewing by eliminating unpredictable distortions of the textile [
110]. Hence, as summarized in
Table 5, it can be anticipated that the human worker will have more iterations of applying known solutions than the robot worker following disturbance.
As shown in
Table 5, the differences between worker types may require detailed calculations. As power consumption ratio 1/10,000 and processing time ratio 10,000/1 for human worker to robot worker balance each other, there is no need to calculate
Si for this example where 0.54 and 1.00 are clearly lower than 1.37 and 2.75. However, the 1/1.5 motion ratio for human worker to robot worker necessitates calculation of
.
for human worker can be calculated for Equation (43) as follows:
2^(1.37) + 0.5[2^(2.75) − 2^(1.37)]
2.58 + 0.5(6.73 − 2.58)
2.58 + 2.07
4.65
for robot worker can be calculated for Equation (43) as follows
2^(0.54) + 0.5[2^(1.00) × 1.5 − 2^(0.54)]
1.45 + 0.5[(2 × 1.5) − 1.45]
1.45 + 0.5[3 − 1.45]
1.45 + 0.5[1.55]
1.45 + 0.72
2.17
This example illustrates that robot workers can have lower Se despite the 1/1.5 motion ratio of human worker to robot worker. Cyborg workers are not considered in this example because cyborg technologies, such as powered gloves, are not suited to the fine psychomotor skills involved in resewing.
With regard to perfecting actions, psychomotor work skills can be considered across a continuum from closed to open. An example of a closed psychomotor work skills is typing in office work, which involves development of routine expertise in one manual skill with one tool and one type of material. An example of an open skill is any of the craft skills in construction work that involve developing adaptive expertise encompassing many different skills with many different tools and many different types of materials. In between the most closed and most open work skills are those skills acquired in factory work through job enlargement, for example in order to undertake several different tasks in car assembly work [
111]. For workers with expertise in closed skills, repositioning and rework involve little need for the re-perfecting of their skills. For workers with expertise in open skills, by contrast, repositioning and rework bring opportunities to re-perfect their skills through the implicit natural processes of psychomotor skills learning. However, stress caused by disturbance followed by iterations of repositioning and reworking can inhibit natural processes of psychomotor skills learning. In particular, acute stress activates selective molecules called corticotropin-releasing hormones, which disrupt the process by which the brain collects and stores memories [
112]. For robot workers, re-perfecting skills based on iterations of repositioning and rework is fundamentally difficult when the specific features of the disturbance, repositioning, and rework occur only once. In particular, reprogramming, deep learning, and learning from human demonstration are all of limited usefulness when disturbances and their consequences are unpredictable, which they inevitably are in open psychomotor skills work [
113]. Thus, as summarized in
Table 6, it is realistic to assume that there can be many possible re-perfecting actions for human workers, while re-perfecting actions for robot workers will not take place. Consequently, it can be anticipated that there will be few long-term reductions in the number of iterations of repositioning and rework following disturbances. This is the situation in industries deploying open psychomotor skills, such as construction, which suffer from persistent productivity and quality problems [
114]. By contrast, cyborg workers can use implanted or wearable technologies to make explicit that which they may have learnt from repositioning and rework. For example, this can be in the form of making video recordings that can be digitally labelled with semantic tags for subsequent retrieval. However, it can be anticipated that it is low level psychomotor work skill schema that will be re-perfected. This is because the higher the level of the schema, for example, reworking of an entire specific product, the less transferable the schema is to other perturbed tasks in open psychomotor work skills [
115]. Nonetheless, modelling should be focused upon the effects of disturbances on cyborg workers.
As these examples illustrate, modelling of effects on S from disturbances should be informed from the outset by understanding of the limitations of different types of workers in relation to different types of work. Moreover, these examples highlight that the fundamental question in determining how work can be carried out with least action is how can work be engineered to reduce the number of different ways in which different worker types can undertake positioning and repositioning, performing and reperforming, and perfecting and reperfecting? In simple terms, there are no skill shortages where there is zero situated entropy because there is only one way that work can be carried out and there is no uncertainty about what that one way is to the type of worker undertaking the work. However, the question about how to engineer for zero situated entropy needs to take into account the effects of disturbances, rather than engineer only for the flow state and ignore the occurrence of disturbances, because individual disturbances have low frequency of occurrence and low temporal predictability.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}