2.1. MDPDE for General Integer-Valued Time Series Models
Let
be the observations generated from general integer-valued time series models with the conditional distribution of the one-parameter exponential family:
where
is a
-field generated by
and
is a non-negative bivariate function defined on
, depending on the parameter
, and satisfies
for some
for all
. Here,
is a probability mass function, given by
where
is the natural parameter and
and
are known functions. This distribution family includes several famous discrete distributions, such as the Poisson, negative binomial, and binomial distributions. If
,
and
become the conditional mean and variance of
, and
. The derivative of
exists for the exponential family; see Lehmann and Casella [
29]. Since
,
is strictly increasing, and since
,
is also strictly increasing. To emphasize the role of
, we also use
and
to stand for
and
, respectively.
Davis and Liu [
12] showed that the assumption below ensures the strict stationarity and ergodicity of
:
- (A0)
For all
and
,
where
satisfy
.
They also demonstrated that there exists a measurable function , such that almost surely (a.s.).
Meanwhile, the DPD
between two density functions
g and
h is defined as
For a parametric family
with densities given by
and a distribution
H with density
h, the minimum DPD functional
is defined by
In particular, if
,
. Then, given a random sample
with unknown density
h, the MDPDE is defined by
where
and
When
and 1, the MDPDE becomes the MLE and the
-distance estimator, respectively. Basu et al. [
16] revealed that
is consistent for
and asymptotically normal. Furthermore, the estimator is robust against outliers, but still exhibits high efficiency when the true distribution belongs to a parametric family
and
is close to zero. The tuning parameter
controls the trade-off between robustness and asymptotic efficiency. A large
escalates the robustness while a small
yields greater efficiency. The conditional version of the MDPDE is defined similarly (cf. Section 2 of Kim and Lee [
22]).
For
generated from (
1), the MDPDE for general integer-valued time series models is defined as
where
and
is updated recursively using the following equations:
with an arbitrarily chosen initial value
. The MDPDE with
becomes the CMLE from (
3).
Kim and Lee [
22] showed that under the regularity conditions
(A0)–
(A9) stated below, the MDPDE is strongly consistent and asymptotically normal. Conditions
(A10) and
(A11) are imposed to derive the limiting null distribution of the DPD-based change point test in
Section 2.2. Below,
V and
represent a generic integrable random variable and a constant, respectively; the symbol
denotes the
-norm for matrices and vectors; and
is taken under
, where
denotes the true value of
.
- (A1)
is an interior point in the compact parameter space .
- (A2)
.
- (A3)
for some .
- (A4)
.
- (A5)
If there exists , such that a.s., then .
- (A6)
for some .
- (A7)
The mapping
is twice continuously differentiable with respect to
, and satisfies
- (A8)
a.s.
- (A9)
a.s. implies .
- (A10)
a.s.
- (A11)
for some .
Proposition 1. Under(A0)–(A5), a.s. as , and further, under(A0)–(A9),whereand is defined by substituting for in (3). Remark 1. In our empirical study, discussed in Section 3.2, we select an optimal α using the method of Warwick [30] and Warwick and Jones [31]. We choose α that minimizes the trace of the estimated asymptotic mean squared error ():where is the MDPDE with and is the estimate of the asymptotic variance of , computed as Remark 2. Instead of(A6), Kim and Lee [22] assumedto prove Proposition 1. Note that this condition is satisfied directly if(A3)and(A6)hold. In our study, we alter the above condition to(A6)to prove Lemma A1 in the Appendix A, which is needed to obtain the limiting null distribution of the DPD-based change point test in Section 2.2. The following INGARCH(1,1) models are typical examples of general integer-valued time series models:
where
,
with
, and
is compact. Condition
(A0) trivially holds, and the process
has a strictly stationary and ergodic solution. Condition
(A1) can be replaced with the following:
- (A1)′
The true parameter
lies in a compact neighborhood
of
, where
Moreover, we can express
where the initial value
is taken as
for simplicity. Based on the above and
(A4), the conditions
(A2),
(A5), and
(A7)–(A10) are all satisfied for INGARCH(1,1) models, as proven by Theorem 3 of Kang and Lee [
15]. Kim and Lee [
22] showed recently that the following Poisson and negative binomial INGARCH(1,1) models satisfy
(A3) and
(A4). Furthermore, following the arguments presented in
Section 3.2 of their study,
(A6) holds for these models as well. Below, we show that
(A11) holds for Poisson and negative binomial INGARCH(1,1) models.
•
Poisson INGARCH(1,1) model:
In this model,
and
. Since
,
(A11) holds owing to
(A3).
•
NB-INGARCH(1,1) model:
where NB
denotes a negative binomial distribution with parameters
and
. To be more specific, it counts the number of failures before the
r-th success occurs in a sequence of Bernoulli trials with success probability
p. Here,
r is assumed to be known. In this model,
and
. From the fact that
and
, we have
, which is positive and strictly decreasing on
. Moreover, since
, it holds that
and
also has the same upper bound. Hence,
(A11) is satisfied.
In addition to the above models, general integer-valued time series models also include nonlinear models, such as the integer-valued threshold GARCH (INTGARCH) model:
where
with
,
is compact, and
l is a non-negative integer value. For more details, see Remark 3 in Kim and Lee [
22].
2.2. DPD-Based Change Point Test
As a robust test for parameter changes in general integer-valued time series models, we propose a DPD-based test for the following hypotheses:
To construct the test, we employ the objective function of the MDPDE. That is, our test is constructed using the empirical version of the DPD. Let
be that in (
2). To implement our test, we employ the following test statistic:
where
is a consistent estimator of
. For the consistency of
, see Lemma A5 in
Appendix A.
Using the mean value theorem (MVT), we have the following, for each
,
where
is an intermediate point between
and
. From
, we obtain that, for
,
Furthermore, since
is nonsingular (cf. proof of Lemma 7 in Kim and Lee [
22]), this can be expressed as
Substituting the above into (
4) yields
In
Appendix A, we show that the first two terms on the right-hand side of (
5) converge weakly to
, where
is a
d-dimensional standard Brownian bridge and the last term is asymptotically negligible. Therefore, we obtain the following theorem.
Theorem 1. Suppose that conditions(A0)–(A11)hold. Then, under , we haveTherefore, We reject
if
is large; see Table 1 of Lee et al. [
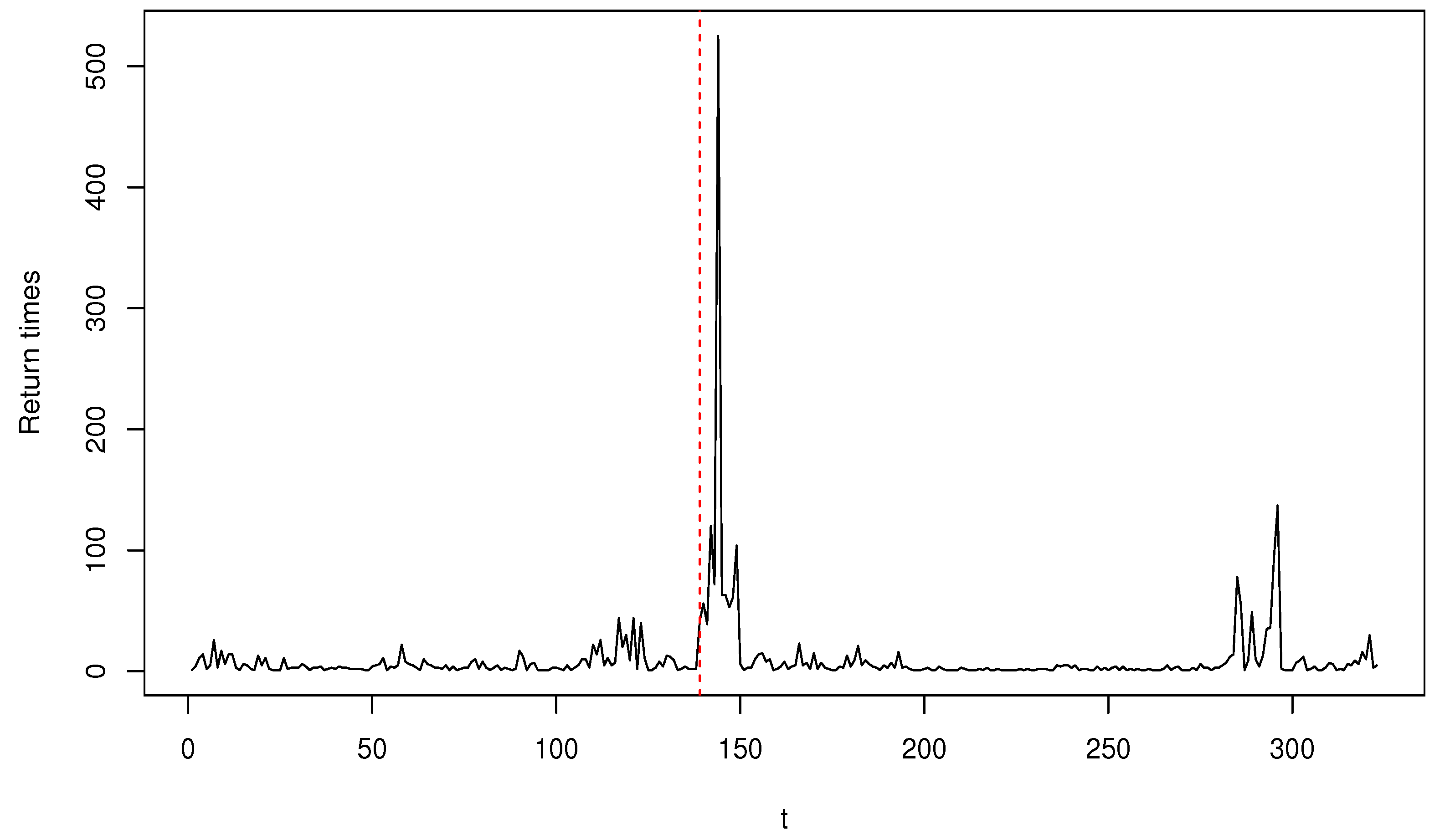
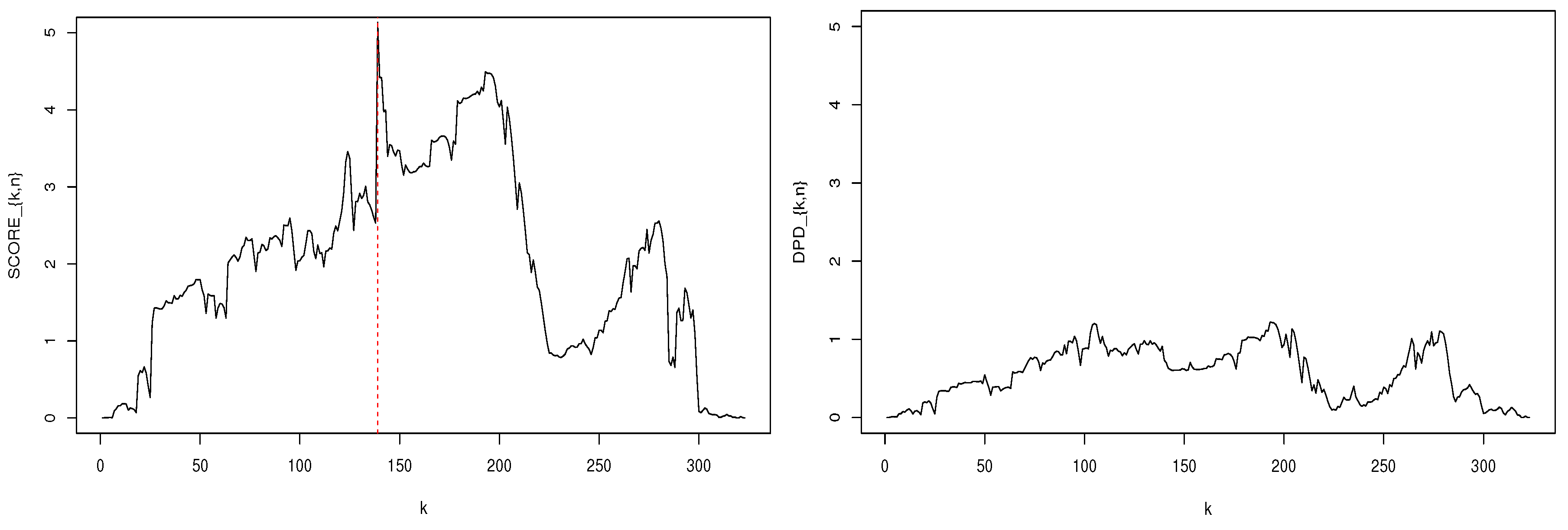
32] for the critical values. When a change point is detected, its location is estimated as
Remark 3. The proposed test with is the same as the score-vector-based CUSUM test proposed by Lee and Lee [14], given bywhere is defined in (3), is the CMLE, and . In the next section, we compare the performance of with that of in the presence of outliers. 




{kind=link}
{kind=link}