Rate of Entropy Production in Evolving Interfaces and Membranes under Astigmatic Kinematics: Shape Evolution in Geometric-Dissipation Landscapes



Abstract
:1. Introduction
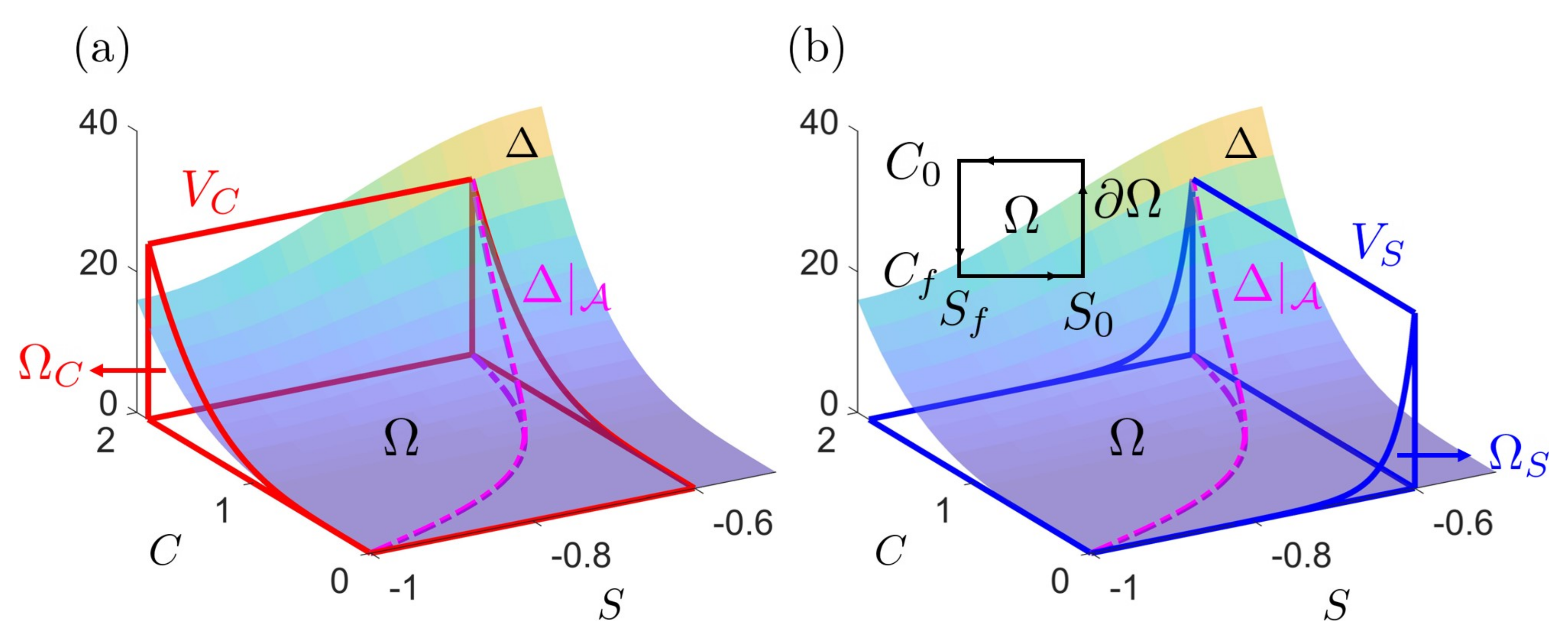
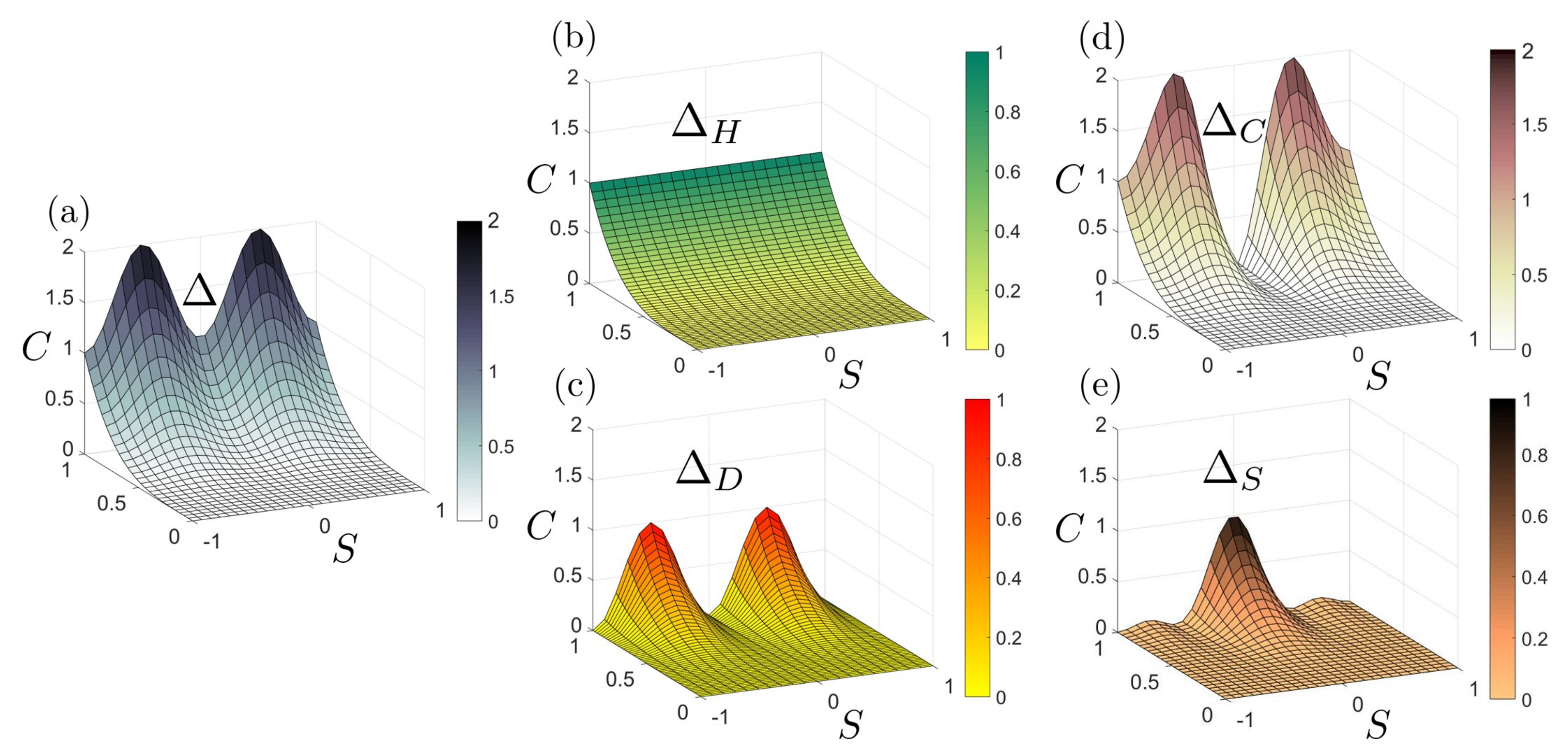
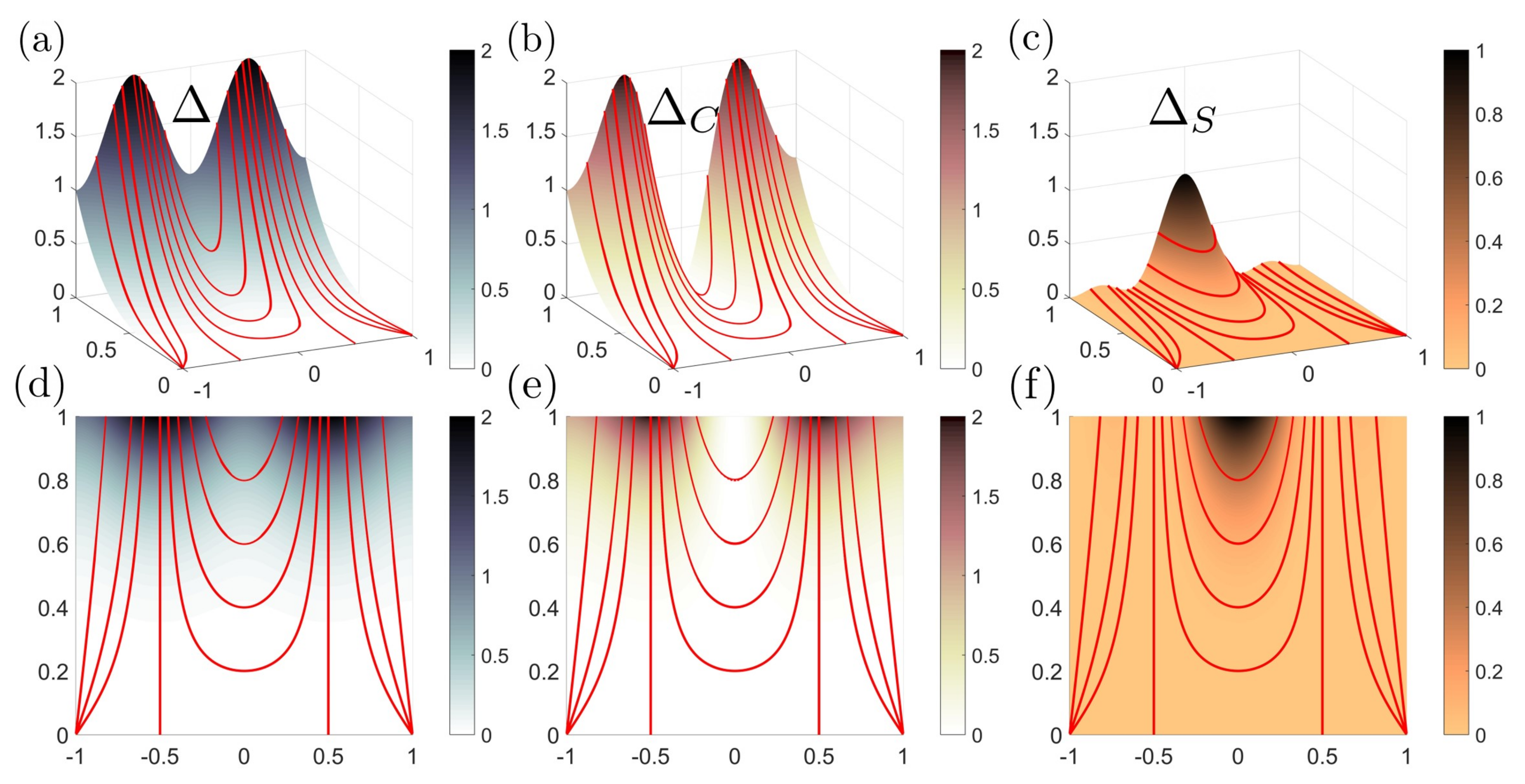
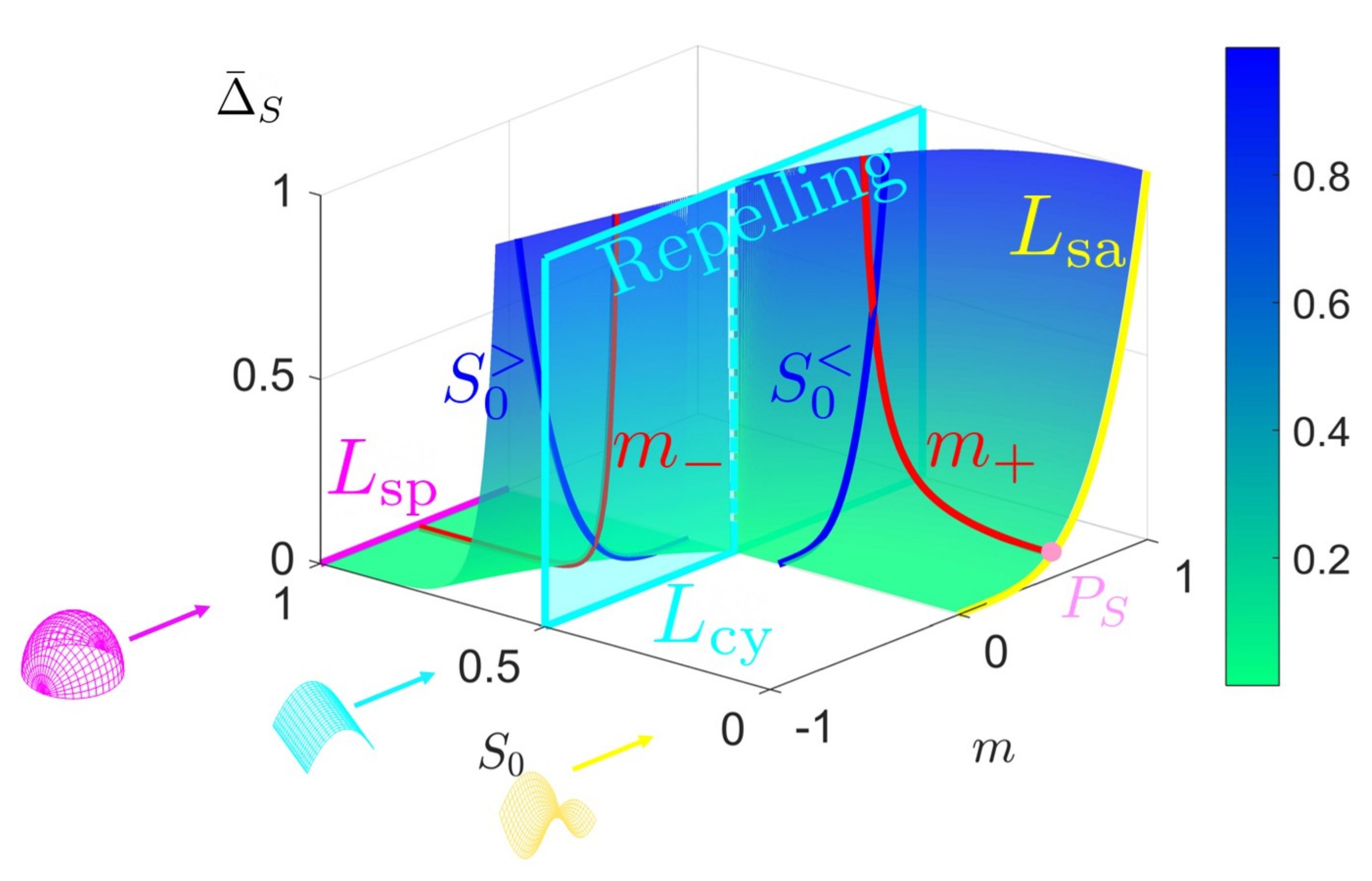
- Using the well-known Boussinesq-Scriven dissipation [1,42,43] due to bending and torsion rates, we reformulate this quantity in terms of curvedness and shape. This is done by expressing bending and twisting rates in terms of actual curvedness and shape and not their rates. This is a crucial step in the present approach. The result of this initial step, shown on Figure 1a, can be expressed in terms of a Monge surface patch [41] for the entropy production rate in terms of its natural coordinates: shape (S), and curvedness (C);
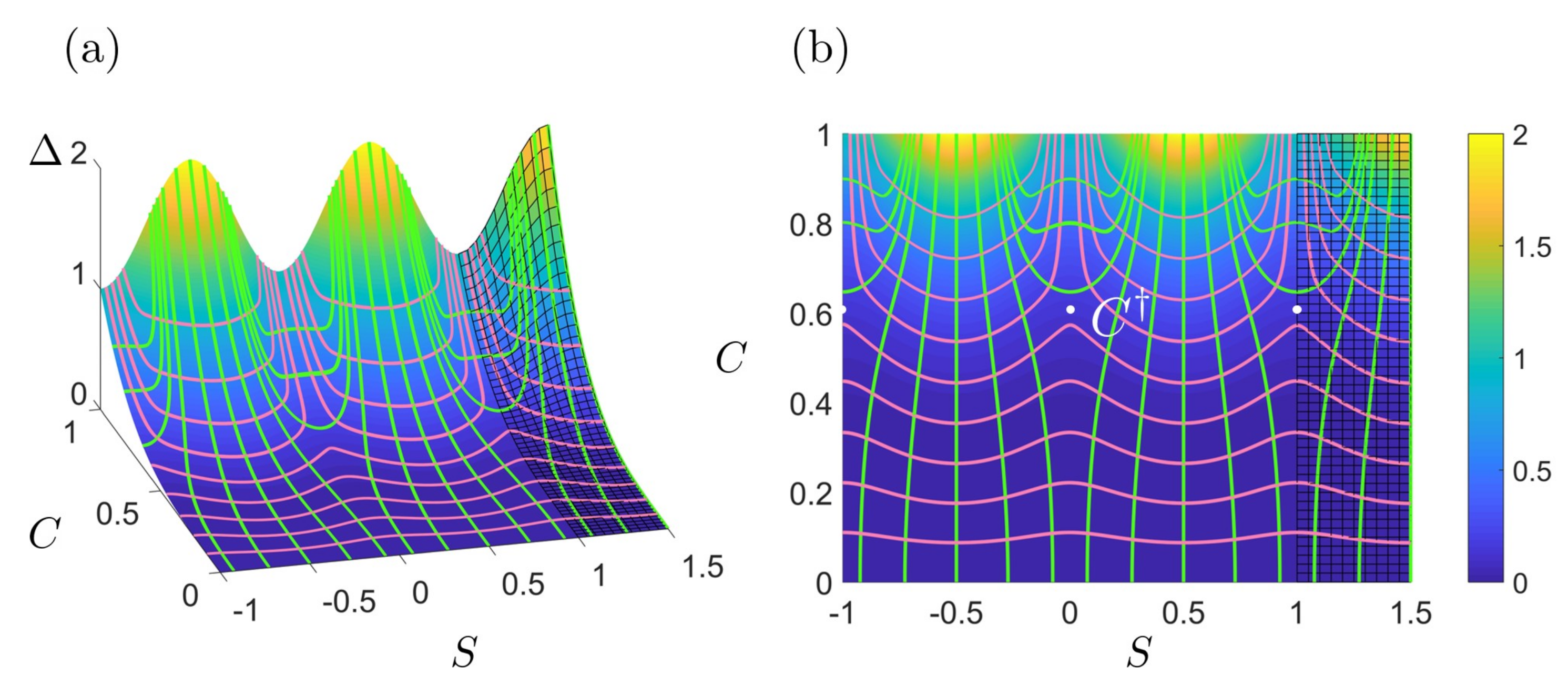
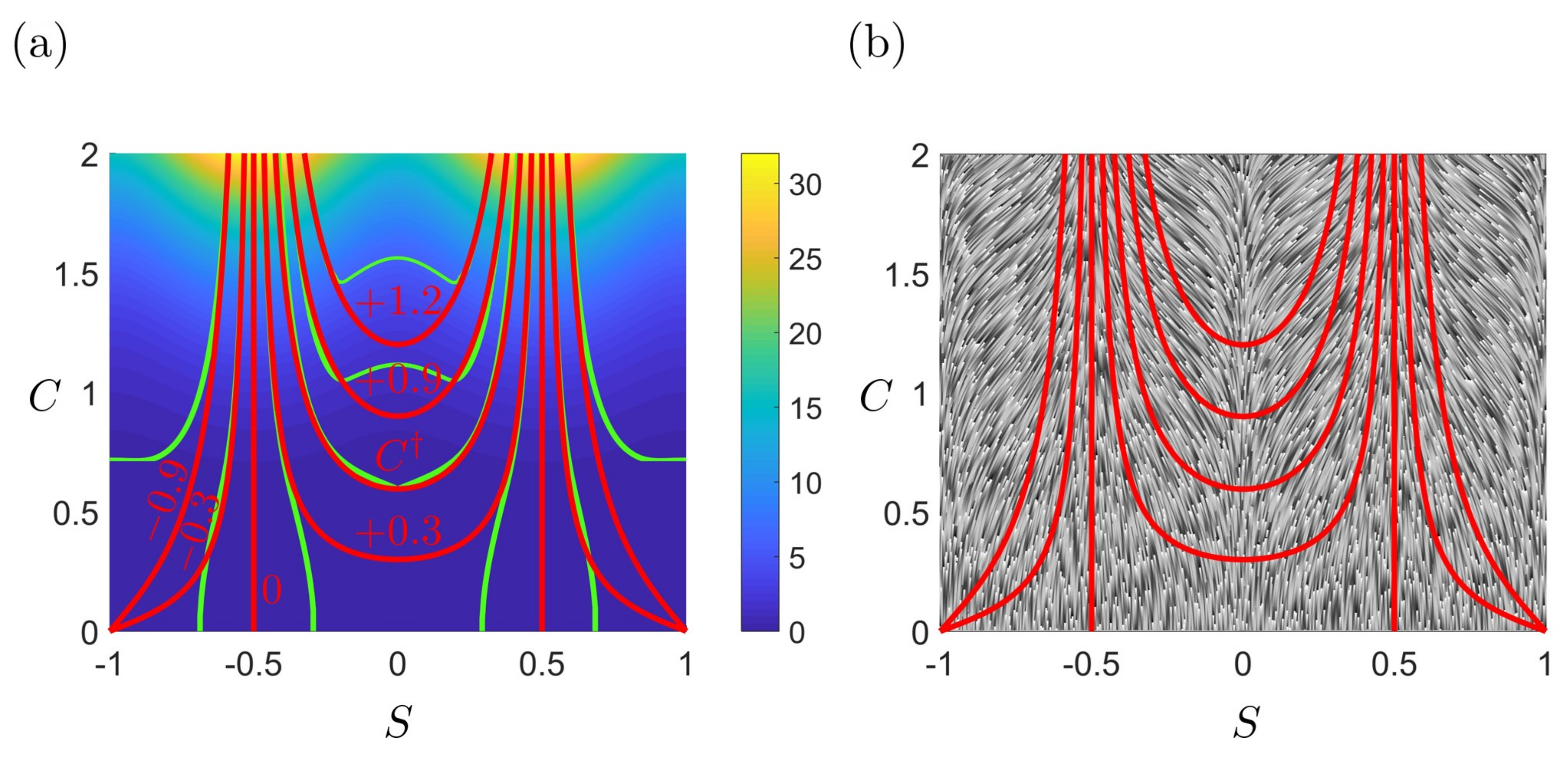
- We then characterize the geometry of this entropy production surface including its curvatures, geodesics, metric, critical points, principal lines of curvature, lines of steepest descent and level set curves [44]. The lines of curvature and umbilical (defect) points are revealed by Figure 1a. This is an essential step to capture the geometry of the rate of entropy production surface;
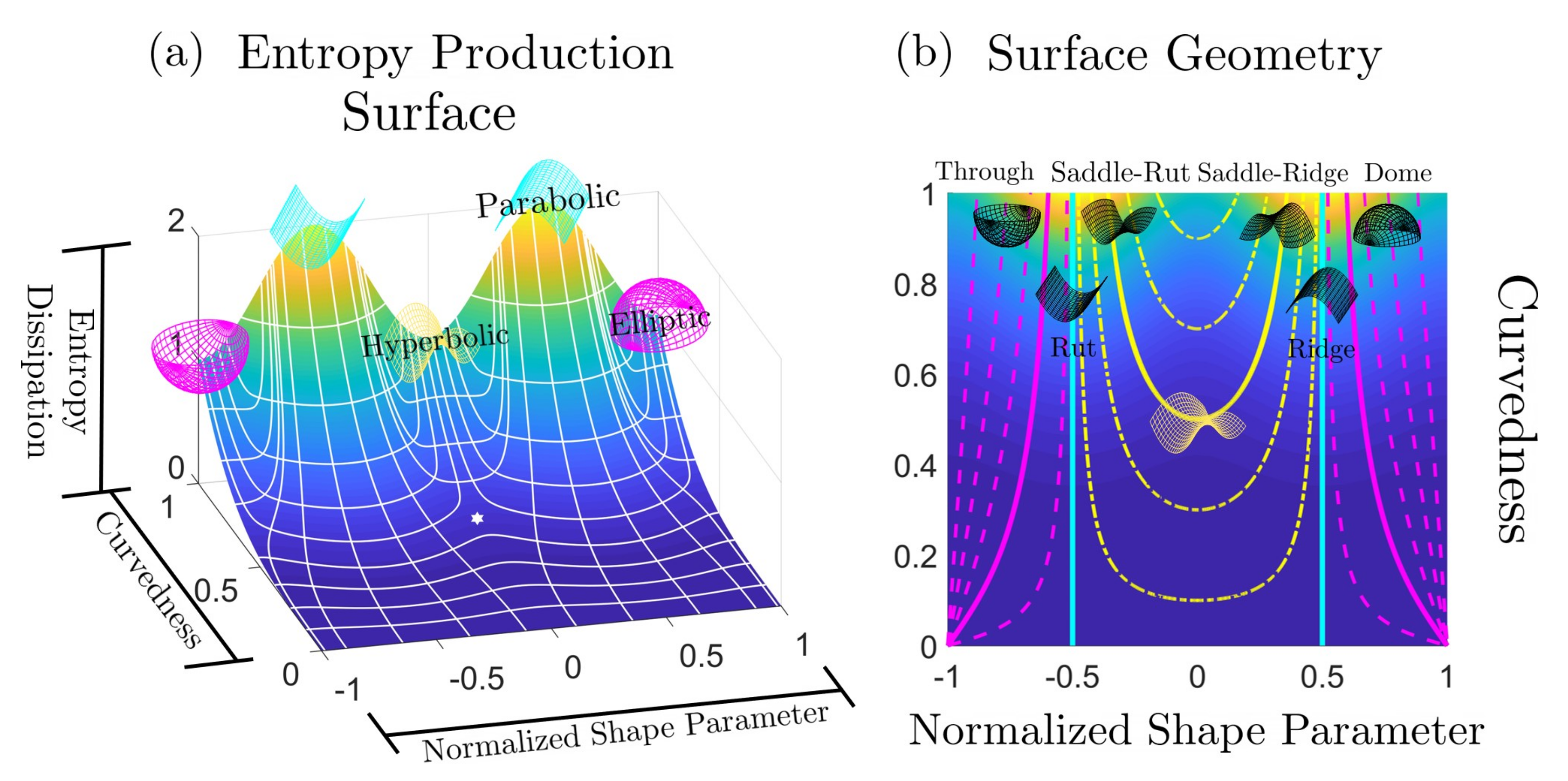
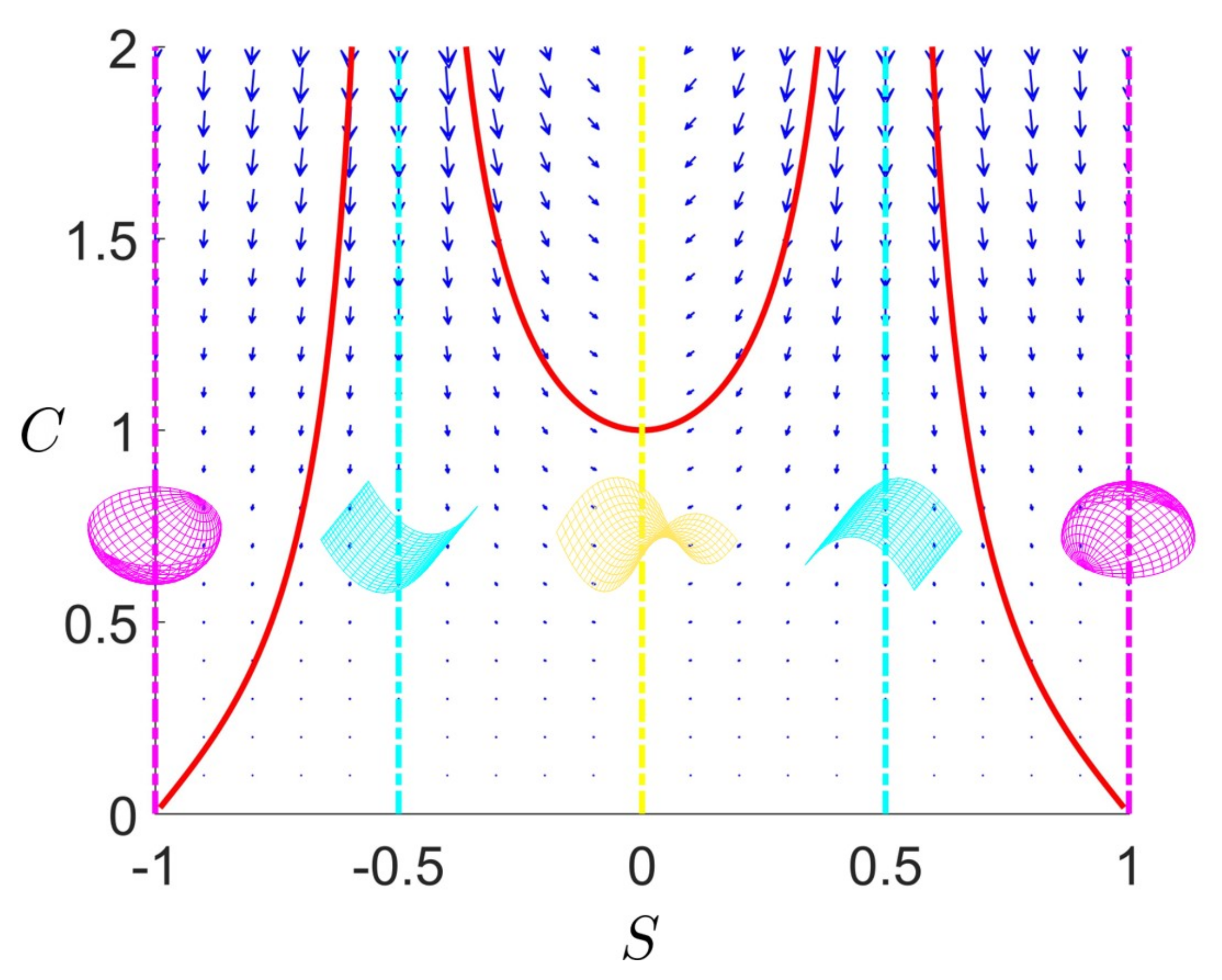
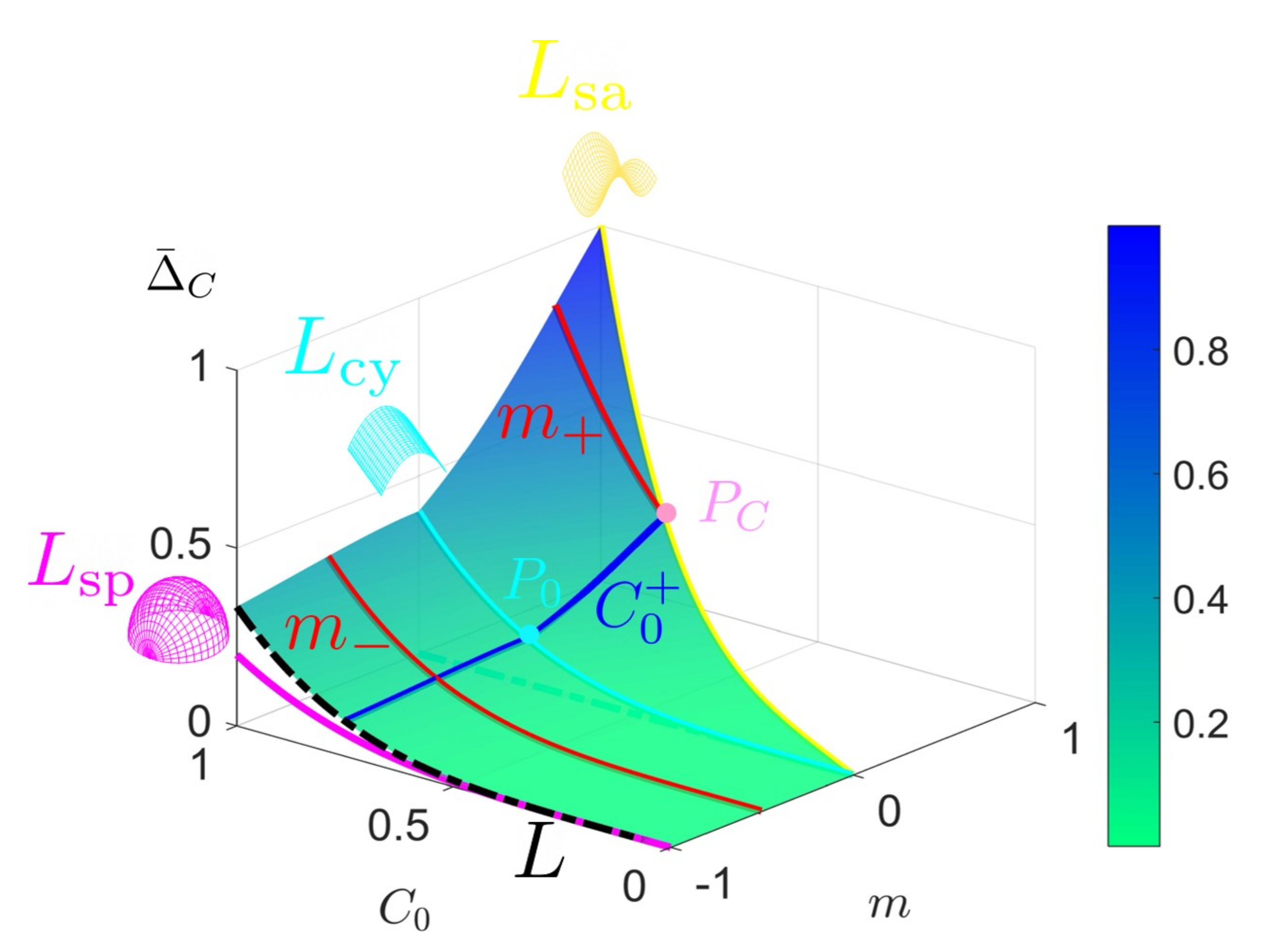
- Each point on the thermodynamic surface corresponds to a physical surface shape (sphere, cylinder, saddle) by fixing curvedness, creating an opportunity to establish a direct connection between the physical surface shape and dissipation rate, as follows from Figure 1. The top three surface patches (magenta: sphere, cyan: cylinder and yellow: saddle) of Figure 1a show characteristic shapes of elliptic, parabolic and hyperbolic patches, respectively. Figure 1b shows the projection of Figure 1a on the -frame. The growth of a surface patch uniquely changes its shape and curvedness, exhibiting as a curve on the -frame. This curve is known as the astigmatic flow. Figure 1b shows a series of astigmatic flow curves. For example, the yellow line shows a hyperbolic patch (saddle-rut or saddle-ridge) that changes into a perfect saddle (). Following the magenta line, an elliptic patch (through or dome) changes into a more spherical patch. We note that the line is a flat surface with no shape. The nomenclature in Figure 1b which distinguish the sign of the shape are more commonly used in engineering;
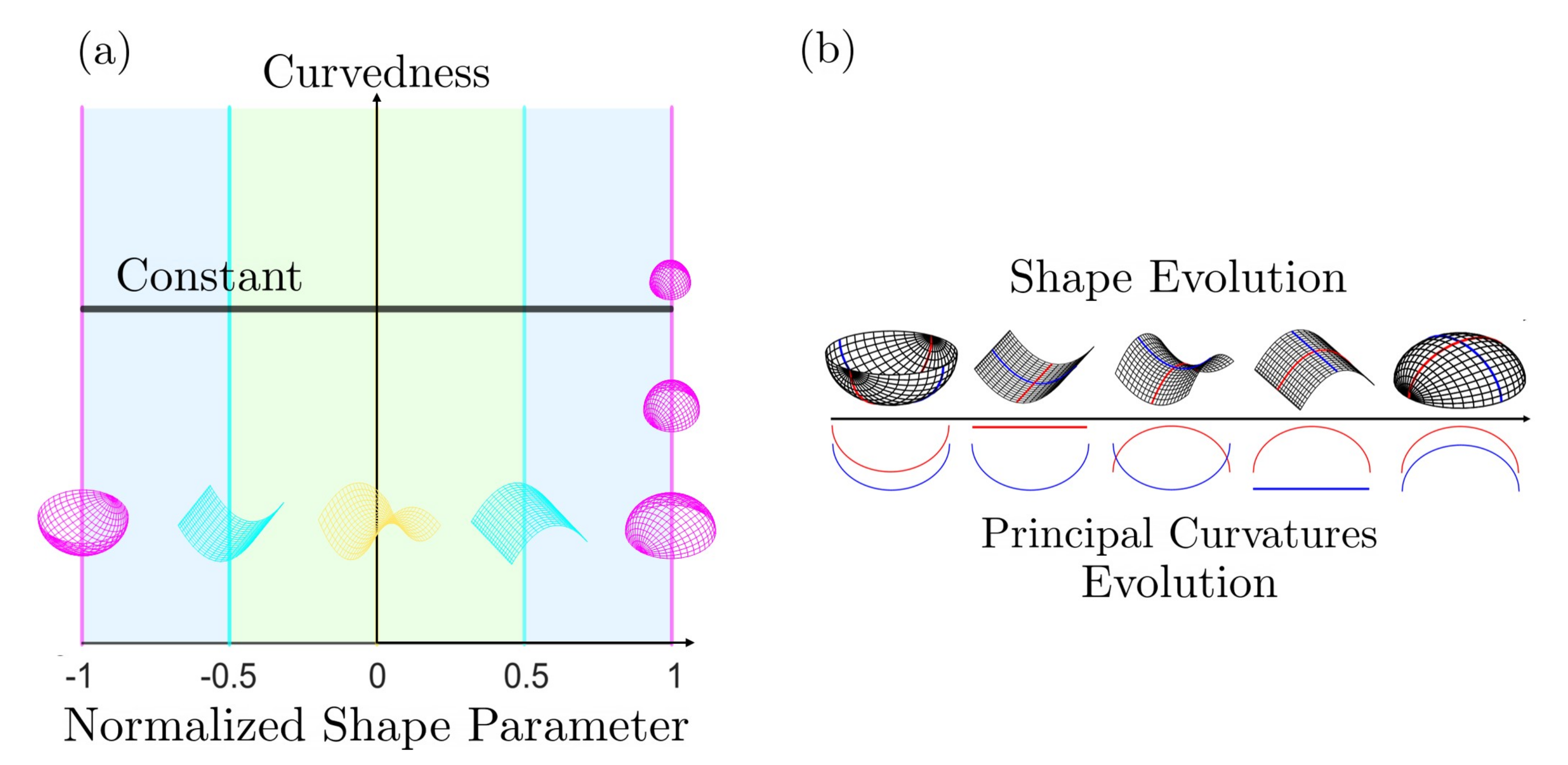
- As this work only considers astigmatic flow [1], we establish and study the evolution lines in detail, given by the astigmatic flow: , where m is an invariant that defines a particular shape evolution trajectory. The evolutions are planar but curved lines on the thermodynamic surface under the -frame. Of particular interest are cases of constant shape evolutions, which are only found for growing spherical and cylindrical patches and serve as important special reference cases;
- The final step is to integrate steps 1–4. Studying these geometric astigmatic trajectories on the entropy production rate landscape we evaluate when the evolution samples high and low entropy production rates, and ultimately establish the corresponding scaling laws.
2. Background of Surface Evolution Model
2.1. Local Geometry Description by the Shape-Curvedness Method
2.2. Astigmatic Flows: Evolving Surfaces by Constant Normal Surface Velocity
- Sphere (), ;
- Cylinder (), ;
- Saddle (), .
2.3. Generalized Boussinesq-Scriven Dissipation for Surfaces, Interfaces and Membranes
3. Results and Discussion

3.1. Geometric Evolution of Surfaces, Interfaces and Membranes
3.1.1. Astigmatic Flow
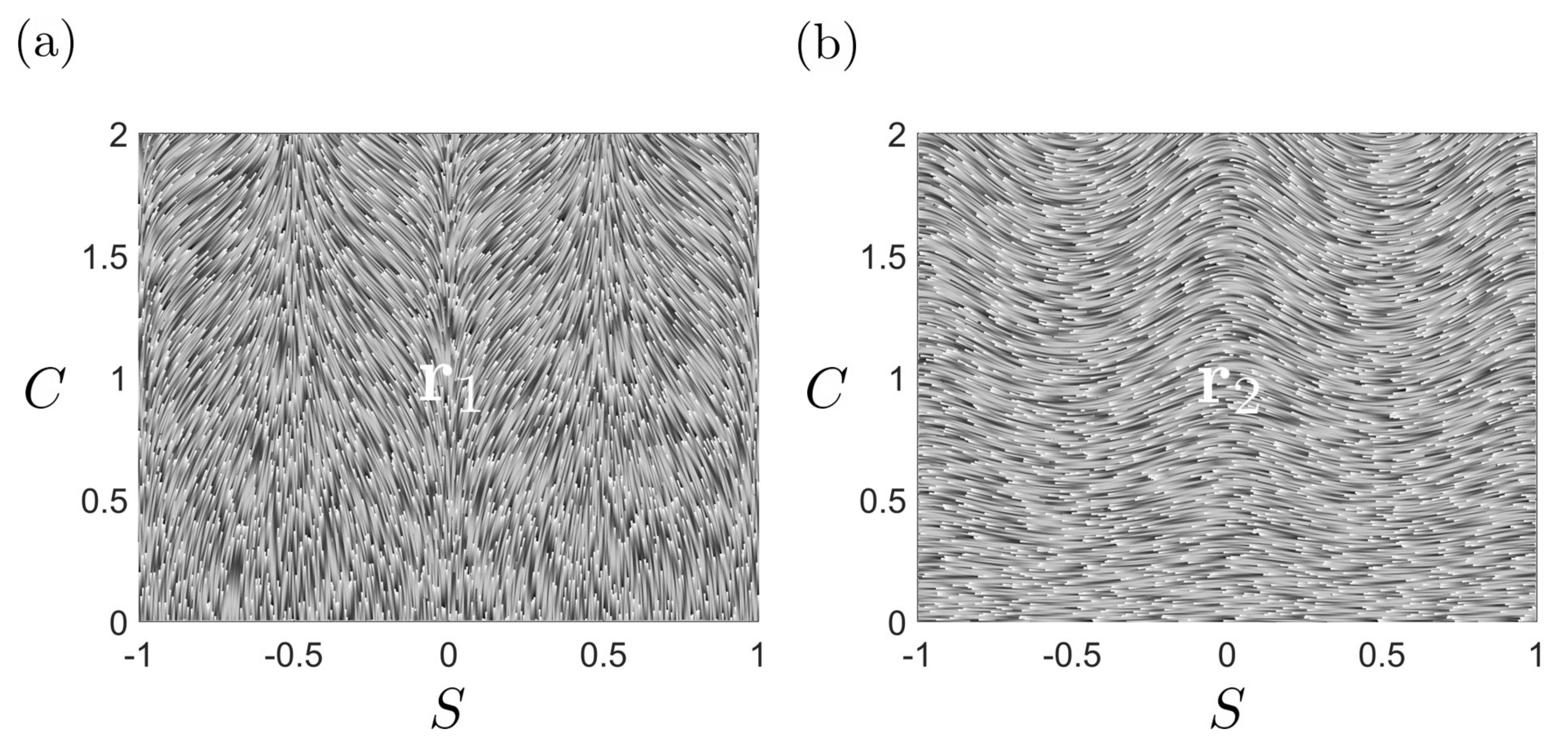
3.1.2. Rate of Curvature Change in Evolving Surfaces under Astigmatic Flow in (C,S)-Frame
- Odd functions such that : H, S and , ;
- Even functions such that : K, D, C and , , .
- : Uniform spherical growth, which ends at so all the geometric rates vanish;
- : The astigmatic flow ends at and , which implies the patch will ending being a sphere. Hence all the geometric rates vanish;
- : Uniform cylinder growth, which also ends at and all geometric rates vanish;
- : The astigmatic flow ends at and . But the velocity has a discontinuity here. So all the geometric rates vanish too.
3.2. Thermodynamic Surface
3.2.1. Entropy Production Rate Surface and its Decomposition
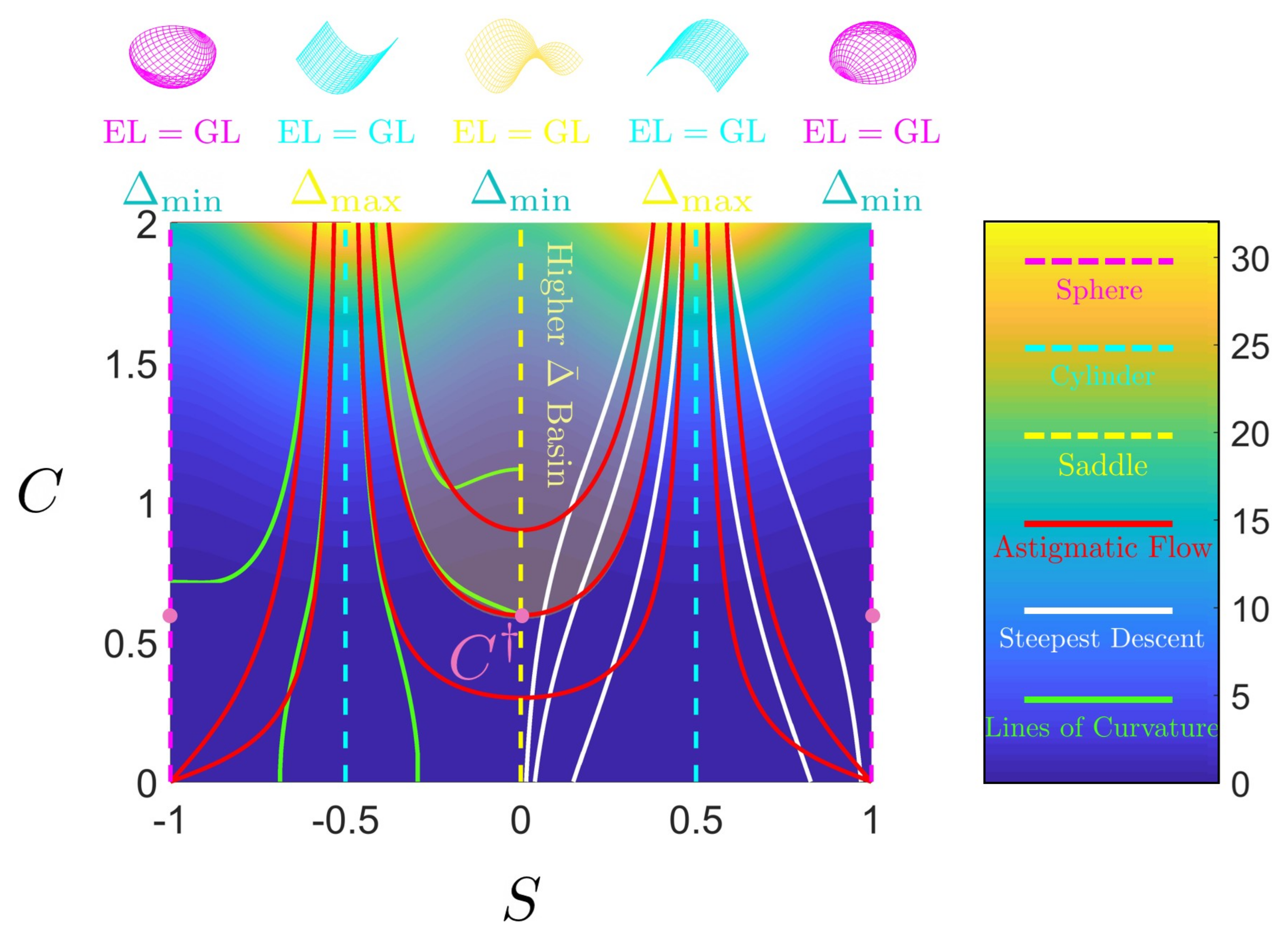
3.2.2. Lines of Curvature (LOC)
3.2.3. Geodesics
3.2.4. Lines of Steepest Descent and Level Set Curves
3.3. Integration of Physical Surface Geometry and Entropy Production
3.3.1. Entropy Dissipation of Astigmatic Flows
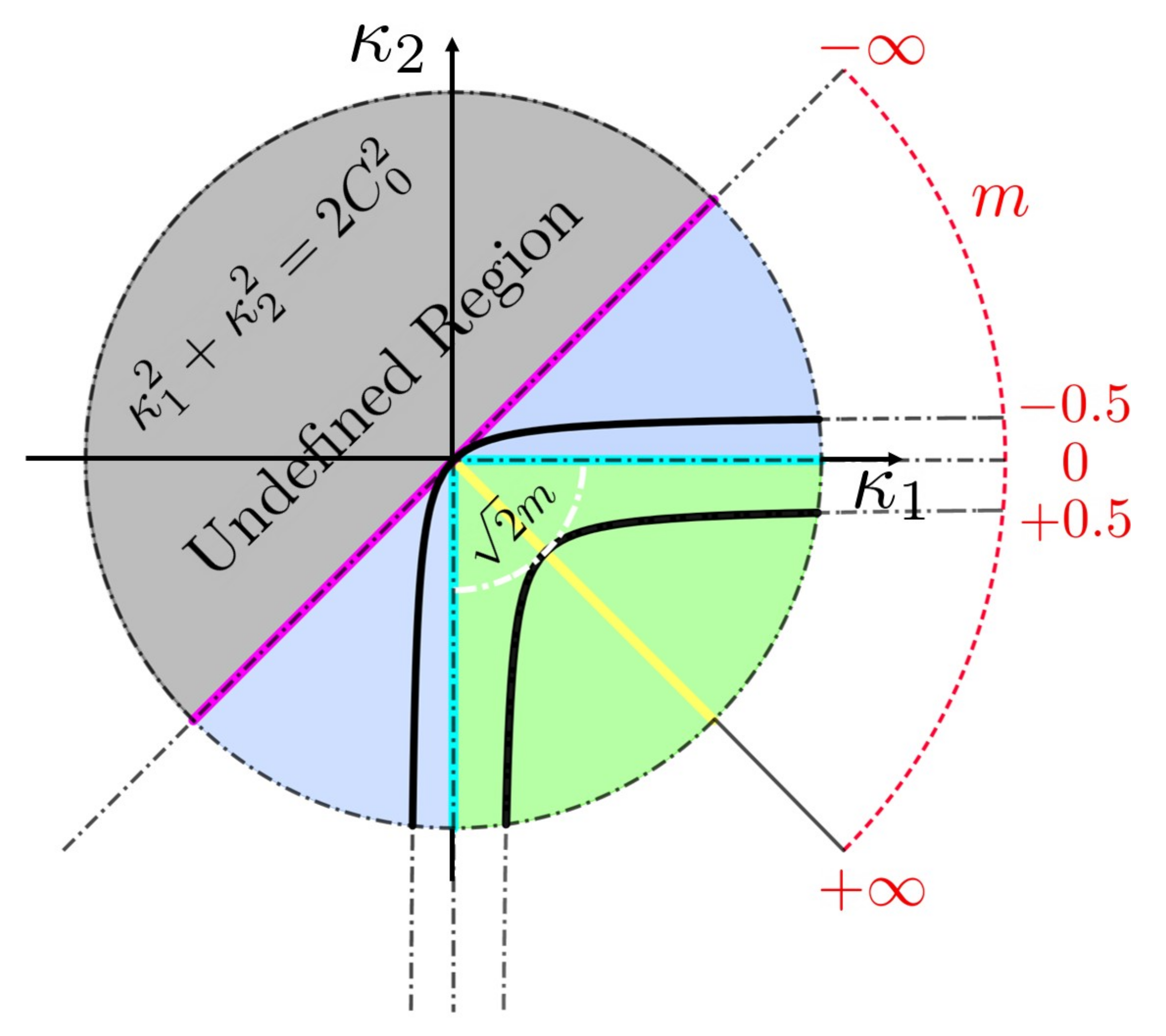
- If , then (between sphere and cylinder, see Figure 1), all the astigmatic flows are distributed separately in region and . And the astigmatic flows eventually end to , implying that the surface only evolves to a flat plane (). If , then astigmatic flow becomes . And if , the astigmatic flow becomes .
- If , then (), all the astigmatic flows are distributed within . And the astigmatic flows terminate at , which implies that the surface terminates to a saddle, whose curvedness is a non-zero value m.
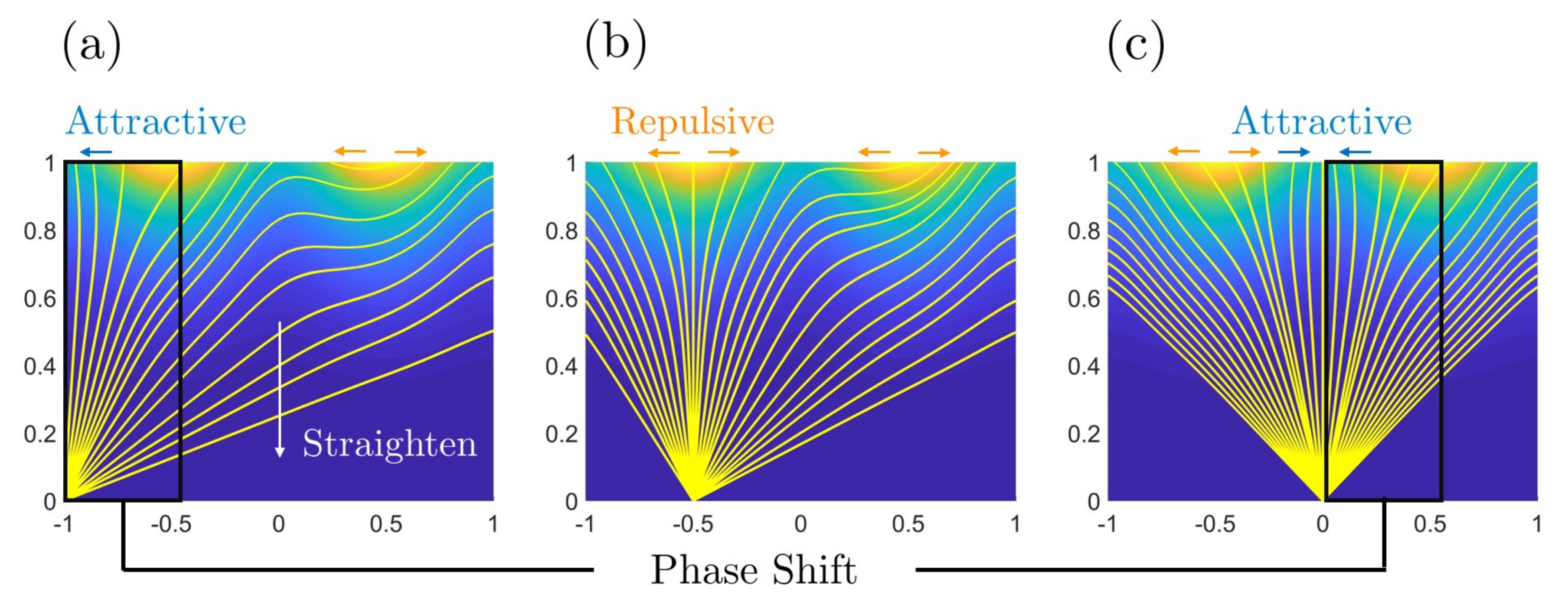
- If , the astigmatic flow becomes . This results in a uniform growth for a surface with vanishing Gaussian curvature, and this is the Theorema Egregium. The astigmatic flow and the growth along geodesics only match in the situation where the surface is locally a cylinder. The astigmatic flows imply that sphere (most of the particle) and saddle (minimal surface) are two stable geometric exhibitions of a small patch. However, a small disturb on a cylindrical surface will result in a bifurcation to a sphere or a saddle, performing as a repelling manifold.
3.3.2. Relationship Between Astigmatic Flow and Thermodynamic Geometric Flows
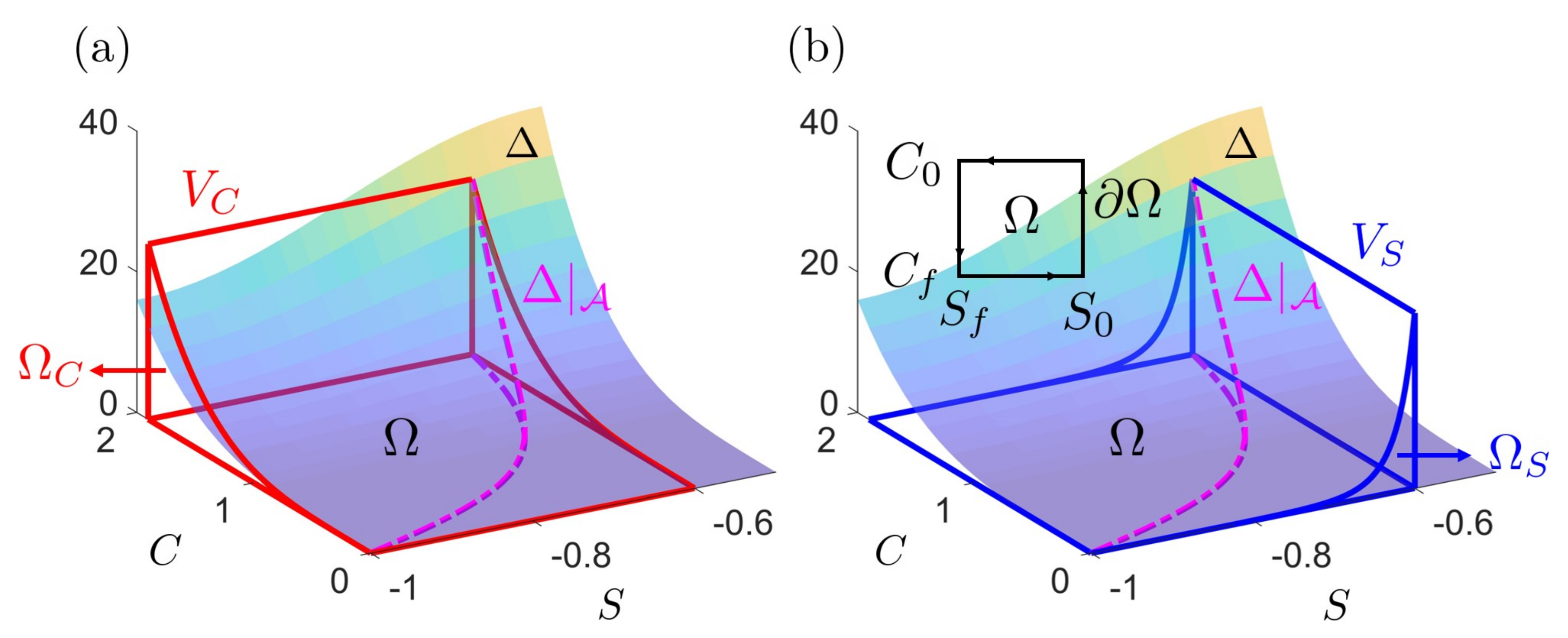
3.3.3. Average Entropy Production Rate
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Tensorial Differential Geometry
Appendix A.1. Tensor Basis
Appendix A.2. Definition through Fundamental Form
Appendix A.3. Lines of Curvature

Appendix A.4. Geodesics
Appendix A.5. The First Fundamental Form
Appendix B. Variational Method
Appendix B.1. Background
Appendix B.2. Variation of Curvatures
Appendix C. Average Entropy Production Rate
References
- Gutierrez, O.F.A.; Rey, A.D. Extracting shape from curvature evolution in moving surfaces. Soft Matter 2018, 14, 1465–1473. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Adams, J.M. Particle size and shape effects in materials science: Examples from polymer and paper systems. Clay Miner. 1993, 28, 509–530. [Google Scholar] [CrossRef]
- Nielsen, L.F. Composite Materials: Properties as Influenced by Phase Geometry; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2005; pp. 7–16. [Google Scholar]
- Klingenberg, C.P. Size, shape, and form: Concepts of allometry in geometric morphometrics. Dev. Genes Evol. 2016, 226, 113–137. [Google Scholar] [CrossRef] [PubMed]
- Hildebrandt, S.; Tromba, A. The Parsimonious Universe: Shape and Form in the Natural World; Springer Science & Business Media: New York, NY, USA, 1996. [Google Scholar]
- Bourgine, P.; Lesne, A. The Language of Shape: The Role of Curvature in Condensed Matter: Physics, Chemistry and Biology; Elsevier: Amsterdam, The Netherlands, 1996. [Google Scholar]
- Hyde, S.; Blum, Z.; Landh, T.; Lidin, S.; Ninham, B.W.; Andersson, S.; Larsson, K. Morphogenesis: Origins of Patterns and Shapes; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Shi, P.; Ratkowsky, D.A.; Gielis, J. The generalized Gielis geometric equation and its application. Symmetry 2020, 12, 645. [Google Scholar] [CrossRef] [Green Version]
- Edwards, D.A.; Brenner, H.; Wasan, D.T. Interfacial Transport Processes and Rheology; Bufferworth-Heinemann: Boston, MA, USA, 1991; pp. 41–96. [Google Scholar]
- Epand, R.M.; D’Souza, K.; Berno, B.; Schlame, M. Membrane curvature modulation of protein activity determined by NMR. Biochim. Biophys. Acta 2015, 1848, 220–228. [Google Scholar] [CrossRef] [Green Version]
- Fife, J.L.; Voorhees, P.W. The morphological evolution of equiaxed dendritic microstructures during coarsening. Acta Mater. 2009, 57, 2418–2428. [Google Scholar] [CrossRef]
- Gurevich, S.; Soule, E.; Rey, A.; Reven, L.; Provatas, N. Self-assembly via branching morphologies in nematic liquid-crystal nanocomposites. Phys. Rev. E 2014, 90, 020501. [Google Scholar] [CrossRef] [Green Version]
- Siegel, D.P. The Gaussian curvature elastic energy of intermediates in membrane fusion. Biophys. J. 2008, 95, 5200–5215. [Google Scholar] [CrossRef] [Green Version]
- Bidan, C.M.; Kommareddy, K.P.; Rumpler, M.; Kollmannsberger, P.; Fratzl, P.; Dunlop, J.W.C. Geometry as a factor for tissue growth: Towards shape optimization of tissue engineering scaffolds. Adv. Healthc. Mater. 2013, 2, 186–194. [Google Scholar] [CrossRef]
- Wadell, H. Volume, shape, and roundness of quartz particles. J. Geol. 1935, 43, 250–280. [Google Scholar] [CrossRef]
- Oswald, P.; Dequidt, A.; Poy, G. Lehmann effect in nematic and cholesteric liquid crystals: A review. Liq. Cryst. Rev. 2019, 7, 142–166. [Google Scholar] [CrossRef]
- Bisoyi, H.K.; Bunning, T.J.; Li, Q. Stimuli-driven control of the helical axis of self-organized soft helical superstructures. Adv. Mater. 2018, 30, 1706512. [Google Scholar] [CrossRef] [PubMed]
- Kitamura, I.; Oishi, K.; Hara, M.; Nagano, S.; Seki, T. Photoinitiated Marangoni flow morphing in a liquid crystalline polymer film directed by super-inkjet printing patterns. Sci. Rep. 2019, 9, 2556. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, J.; Yang, Y.; Wua, J.; Rui, X.; Wang, W.; Ren, R.; Zhang, Q.; Chen, Q.; Yin, D. Spatiotemporal variations of contact stress between liquid-crystal films and fibroblasts Guide cell fate and skin regeneration. Colloids Surf. B 2020, 188, 110745. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Rofouie, P.; Rey, A.D. Surface anchoring effects on the formation of two-wavelength surface patterns in chiral liquid crystals. Crystals 2019, 9, 190. [Google Scholar] [CrossRef] [Green Version]
- Jerome, B. Surface effects and anchoring in liquid crystals. Rep. Prog. Phys. 1991, 54, 391–452. [Google Scholar] [CrossRef]
- Meister, R.; Dumoulin, H.; Hallé, M.A.; Pieranski, P. The anchoring of a cholesteric liquid crystal at the free surface. J. Phys. II 1996, 6, 827–844. [Google Scholar] [CrossRef] [Green Version]
- Rofouie, P.; Wang, Z.; Rey, A.D. Two-wavelength wrinkling patterns in helicoidal plywood surfaces: Imprinting energy landscapes onto geometric landscapes. Soft Matter 2018, 14, 5180–5185. [Google Scholar] [CrossRef]
- Rofouie, P.; Pasini, D.; Rey, A.D. Nano-scale surface wrinkling in chiral liquid crystals and plant-based plywoods. Soft Matter 2015, 11, 1127–1139. [Google Scholar] [CrossRef] [Green Version]
- Rofouie, P.; Pasini, D.; Rey, A.D. Tunable nano-wrinkling of chiral surfaces: Structure and diffraction optics. J. Chem. Phys. 2015, 143, 114701. [Google Scholar] [CrossRef]
- Rofouie, P.; Pasini, D.; Rey, A.D. Morphology of elastic nematic liquid crystal membranes. Soft Matter 2017, 13, 5366–5380. [Google Scholar] [CrossRef] [PubMed]
- Rofouie, P.; Pasini, D.; Rey, A.D. Nanostructured free surfaces in plant-based plywoods driven by chiral capillarity. Colloids Interface Sci. Commun. 2014, 1, 23–26. [Google Scholar] [CrossRef] [Green Version]
- Rey, A.D. Thermodynamics of soft anisotropic interfaces. J. Chem. Phys. 2004, 120, 2010–2019. [Google Scholar] [CrossRef]
- Rey, A.D. Thermodynamic model of surfactant adsorption on soft liquid crystal interfaces. Langmuir 2004, 20, 11473–11479. [Google Scholar] [CrossRef] [PubMed]
- Almeida, A.P.C.; Canejo, J.P.; Fernandes, S.N.; Echeverria, C.; Almeida, P.L.; Godinho, M.H. Cellulose-based biomimetics and their applications. Adv. Mater. 2018, 30, 1703655. [Google Scholar] [CrossRef]
- Serra, F.; Gharbi, M.A.; Luo, Y.; Liu, I.B.; Bade, N.D.; Kamien, R.D.; Yang, S.; Stebe, K.J. Curvature-driven, one-step assembly of reconfigurable smectic liquid crystal “compound eye” lenses. Adv. Opt. Mater. 2015, 3, 1287–1292. [Google Scholar] [CrossRef] [Green Version]
- Meyer, C.; Cunff, L.L.; Belloul, M.; Foyart, G. Focal conic stacking in smectic A liquid crystals: Smectic flower and apollonius tiling. Materials 2009, 2, 499–513. [Google Scholar] [CrossRef] [Green Version]
- Pelcé, P. New Visions on Form and Growth: Fingered Growth, Dendrites, and Flames; Oxford University Press: New York, NY, USA, 2004. [Google Scholar]
- Gadomskia, A.; Rubí, J.M. On the two principal curvatures as potential barriers in a model of complex matter agglomeration. Chem. Phys. 2003, 293, 169–177. [Google Scholar] [CrossRef]
- Siódmiak, J.; Uher, J.J.; Santamaría-Holek, I.; Kruszewska, N.; Gadomski, A. On the protein crystal formation as an interface-controlled process with prototype ion-channeling effect. J. Biol. Phys. 2007, 33, 313–329. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gadomski, A.; Grzywna, Z.J.; Łuczka, J. The growing process in diffusive and convective fields. Chem. Eng. Sci. 1993, 48, 3713–3721. [Google Scholar] [CrossRef]
- Gadomski, A. On the spherical prototype of a complex dissipative late-stage formation seen in terms of least action Vojta–Natanson principle. BioSystems 2008, 94, 242–247. [Google Scholar] [CrossRef] [PubMed]
- Ruppeiner, G.; Sahay, A.; Sarkar, T.; Sengupta, G. Thermodynamic geometry, phase transitions, and the Widom line. Phys. Rev. E 2012, 86, 052103. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ruppeiner, G. Thermodynamic curvature measures interactions. Am. J. Phys. 2010, 78, 1170. [Google Scholar] [CrossRef] [Green Version]
- Andresen, B.; Berry, R.S.; Gilmore, R.; Ihrig, E.; Salamon, P. Thermodynamic geometry and the metrics of Weinhold and Gilmore. Phys. Rev. A 1988, 37, 845. [Google Scholar] [CrossRef]
- Gray, A.; Abbena, E.; Salamon, S. Modern Differential Geometry of Curves and Surfaces with Mathematica; CRC Press: Boca Raton, FL, USA, 1993; pp. 305–306. [Google Scholar]
- Rey, A.D. Polar fluid model of viscoelastic membranes and interfaces. J. Colloid Interface Sci. 2006, 304, 226–238. [Google Scholar] [CrossRef]
- Murugesan, Y.K.; Rey, A.D. Structure and rheology of fiber-laden membranes via integration of nematodynamics and membranodynamics. J. Nonnewton Fluid Mech. 2010, 165, 32–44. [Google Scholar] [CrossRef]
- Do Carmo, M.P. Differential Geometry of Curves and Surfaces; Dover Publications: Mineola, NY, USA, 2016. [Google Scholar]
- Gutierrez, O.F.A.; Herrera-Valencia, E.E.; Rey, A.D. Generalized Boussinesq-Scriven surface fluid model with curvature dissipation for liquid surfaces and membranes. J. Colloid Interf. Sci. 2017, 503, 103–114. [Google Scholar] [CrossRef]
- Koenderink, J.J.; Doorn, A.J.V. Surface shape and curvature scales. Image Vis. Comput. 1992, 10, 557–564. [Google Scholar] [CrossRef]
- Kralchevsky, P. Particles at Fluid Interfaces and Membranes: Attachment Of Colloid Particles and Proteins to Interfaces and Formation of Two-Dimensional Arrays; Elsevier: Amsterdam, The Netherlands, 2001; pp. 105–136. [Google Scholar]
- Ljunggren, S.; Eriksson, J.C.; Kralchevsky, P.A. Minimization of the free energy of arbitrarily curved interfaces. J. Colloid Interf. Sci. 1997, 191, 421–441. [Google Scholar] [CrossRef] [Green Version]
- Eliassen, J.D. The Thermodynamics of Low Tension and Highly Curved Interfaces. Ph.D. Thesis, University of Minnesota, Minneapolis, MN, USA, 1963. [Google Scholar]
- Krivoshapko, S.; Ivanov, V.N. Encyclopedia of Analytical Surfaces; Springer: Cham, Switzerland, 2015. [Google Scholar]
- Baran, H.; Marvan, M. On integrability of Weingarten surfaces: A forgotten class. J. Phys. A 2009, 42, 404007. [Google Scholar] [CrossRef] [Green Version]
- Rey, A.D.; Denn, M.M. Jeffrey-Hamel flow of Leslie-Ericksen nematic liquids. J. Non-Newton. Fluid Mech. 1988, 27, 375–401. [Google Scholar] [CrossRef] [Green Version]
- Leslie, F.M. Some constitutive equations for liquid crystals. Arch. Ration. Mech. Anal. 1968, 28, 265–283. [Google Scholar] [CrossRef]
- Rey, A.D. Linear viscoelastic model for bending and torsional modes in fluid membranes. Rheol. Acta 2008, 47, 861–871. [Google Scholar] [CrossRef]
- Abou-Dakka, M.; Herrera-Valencia, E.E.; Rey, A.D. Linear oscillatory dynamics of flexoelectric membranes embedded in viscoelastic media with applications to outer hair cells. J. Nonnewton Fluid Mech. 2012, 185, 1–17. [Google Scholar] [CrossRef] [Green Version]
- Rey, A.D.; Servio, P.; Herrera-Valencia, E.E. Bioinspired model of mechanical energy harvesting based on flexoelectric membranes. Phys. Rev. E 2013, 87, 022505. [Google Scholar] [CrossRef] [Green Version]
- Machon, T.J. Aspects of Geometry and Topology in Liquid Crystalline Phases. Ph.D. Thesis, University of Warwick, Coventry, UK, 2016. [Google Scholar]
- Rey, A.D. Liquid crystal models of biological materials and processes. Soft Matter 2010, 6, 3402–3429. [Google Scholar] [CrossRef]
- Wincure, B.M.; Rey, A.D. Nanoscale analysis of defect shedding from liquid crystal interfaces. Nano Lett. 2007, 7, 1474–1479. [Google Scholar] [CrossRef]
- Luca, G.D.; Rey, A.D. Ringlike cores of cylindrically confined nematic point defects. J. Chem. Phys. 2007, 126, 094907. [Google Scholar] [CrossRef]
- Rey, A.D. Generalized young-laplace equation for nematic liquid crystal interfaces and its application to free-surface defects. Mol. Cryst. Liq. Cryst. 2001, 369, 63–74. [Google Scholar] [CrossRef]
- Gupta, G.; Rey, A.D. Texture rules for concentrated filled nematics. Phys. Rev. Lett. 2005, 95, 127802. [Google Scholar] [CrossRef]
- Rey, A.D. Defect controlled dynamics of nematic liquids. Liq. Cryst. 1990, 7, 315–334. [Google Scholar] [CrossRef]
- Sotomayor, J.; Garcia, R. Lines of curvature on surfaces, historical comments and recent developments. São Paulo J. Math. Sci. 2008, 2, 99–143. [Google Scholar] [CrossRef] [Green Version]
- Patrikalakis, N.M.; Maekawa, T. Shape Interrogation for Computer Aided Design And Manufacturing; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2002; pp. 265–291. [Google Scholar]
- Maekawa, T. Computation of shortest paths on free-form parametric surfaces. J. Mech. Des. 1996, 118, 499–508. [Google Scholar] [CrossRef]
- Ma, K.F. Evenly Spaced Streamlines. Available online: https://www.mathworks.com/matlabcentral/fileexchange/59476-evenly-spaced-streamlines (accessed on 6 October 2016).
- Drew, D.A. Evolution of geometric statistics. SIAM J. Appl. Math. 1990, 50, 649–666. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Curvatures | Symbols | Significance | Relations | Tensor Contractions | Principal Curvatures |
|---|---|---|---|---|---|
| Mean | H | Arithmetic Mean | |||
| Gaussian | K | Intrinsic Curvature | |||
| Deviatoric | D | Sphericity Deviation | |||
| Casorati | C | Planarity Deviation |
| Parameter Changing Rate | Symbols | Pure Growth Dynamics | Sphere | Cylinder | Saddle |
|---|---|---|---|---|---|
| Mean | |||||
| Gaussian | 0 | 0 | |||
| Deviatoric | 0 | 0 | |||
| Casorati | 0 | ||||
| Shape Parameter | 0 | 0 |
| Parameter Changing Rate | Symbols | Pure Growth Dynamics | Sphere | Cylinder | Saddle |
|---|---|---|---|---|---|
| Mean | |||||
| Gaussian | 0 | 0 | |||
| Deviatoric | 0 | 0 | |||
| Casorati | 0 | ||||
| Shape Parameter | 0 | 0 |
| Shape | ||||||
|---|---|---|---|---|---|---|
| Saddle | min | invariant | min | min (0) | max | |
| Cylinder | max | invariant | max | max | min (0) | |
| † | Ellipsoid (Dome) | / | invariant | / | / | local max |
| Sphere | min | invariant | min | local min | min (0) |
| Primitive Physical Surface | Sphere | Cylinder | Saddle (above ) | Saddle (below ) |
|---|---|---|---|---|
| Principal Curvature (min, max) (Figure 6) | ||||
| Geodesic Line Orientation (Figure 7) | ||||
| Steepest Descent Curves’ Envelope (Figure 8) | ||||
| Astigamtic Flow Orientation (Figure 4) | ||||
| Key Relations |
| Physical Shape | Sphere | Cylinder | Saddle |
|---|---|---|---|
| Special Surface Lines (Figure 11) | |||
| Invariant Values | |||
| C-averaged Entropy Production Scaling Law | or |
| Physical Shape | Sphere | Elliptic | Cylinder | Hyperbolic | Saddle |
|---|---|---|---|---|---|
| Special Surface Lines (Figure 12) | |||||
| Invariant Values | |||||
| S-averaged Entropy Production Scaling Law | Undefined () | Undefined () | Undefined () |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Servio, P.; Rey, A.D. Rate of Entropy Production in Evolving Interfaces and Membranes under Astigmatic Kinematics: Shape Evolution in Geometric-Dissipation Landscapes. Entropy 2020, 22, 909. https://doi.org/10.3390/e22090909
Wang Z, Servio P, Rey AD. Rate of Entropy Production in Evolving Interfaces and Membranes under Astigmatic Kinematics: Shape Evolution in Geometric-Dissipation Landscapes. Entropy. 2020; 22(9):909. https://doi.org/10.3390/e22090909
Chicago/Turabian StyleWang, Ziheng, Phillip Servio, and Alejandro D. Rey. 2020. "Rate of Entropy Production in Evolving Interfaces and Membranes under Astigmatic Kinematics: Shape Evolution in Geometric-Dissipation Landscapes" Entropy 22, no. 9: 909. https://doi.org/10.3390/e22090909
APA StyleWang, Z., Servio, P., & Rey, A. D. (2020). Rate of Entropy Production in Evolving Interfaces and Membranes under Astigmatic Kinematics: Shape Evolution in Geometric-Dissipation Landscapes. Entropy, 22(9), 909. https://doi.org/10.3390/e22090909