As our system, we consider an overdamped Brownian particle that is in contact with a thermal bath, which acts as its environment. The particle feels a harmonic potential. This is a well proven theoretical model for an experimental system that was formed by a colloidal particle in water at constant temperature and trapped by optical tweezers. The potential
has tunable parameters
, the position of the center of the trap, and
, the stiffness. As the Brownian particle position fluctuates, the energy transfers and thermodynamic potentials become also fluctuating; in fact, they are stochastic variables. The framework to analyze energetics for these fluctuating systems in the mesoscale is stochastic thermodynamics [
14,
15,
16]. We review the main concepts in the following. The Brownian particle may, due to a collision with the solvent, absorb some energy and climb the potential well. Or it may transfer energy back to the thermal bath via viscosity and go down in the potential. These energy transfers with the thermal bath constitute heat
and, and since this energy can be stored as potential energy, this is the internal energy
of the particle. In our system then the internal energy is
[
17,
18,
19,
20]. We will use
to denote a stochastic variable and the regular letter
a for the average over realizations, i.e.,
. Another form of energy transfer is work
: an external agent may modify the harmonic potential (changing the parameters) and increase or decrease the potential energy of the particle. If the internal energy depends on a parameter
that is modified from
to
then, formally, the definition of work is:
This is best seen with an example. For instance, consider a fast increase of the stiffness of the potential from to . If the increase is very fast, so that the particle does not modify its position x during the time, the stiffness is changing, the energy of the particle increases by an amount . This energy is supplied by the agent controlling the potential who has then performed a work . Consequently, the particle is in a tighter parabola and the equilibrium dispersion of the position of the particle decreases, so that this is commonly referred to as a compression. If the stiffness is decreased, work is exerted on the agent by the system and, since the distribution of particle positions will eventually widen, this corresponds to an expansion.
In order to extract energy from the thermal bath, we propose the following cyclic operation in two stages:
2.1. Optimal Confinement
The confinement of a system to a small region of the phase space (at constant temperature) implies a decrease of entropy of the system. For the entropy of a Brownian particle, we use the standard choice of Shannon’s entropy,
, where
is the probability distribution of the particle position. With this choice, the second law of thermodynamics is fulfilled on average and the thermodynamic relation
is recovered for a system in contact with a thermal bath. Although, strictly speaking, this is a generalization of the free energy to non-equilibrium systems, in systems that are in contact to a thermal bath it plays a similar role as the standard thermodynamic free energy, and stochastic thermodynamics for our system closely resembles macroscopic thermodynamics [
9].
Let us consider, for simplicity, that the internal energy change between the initial and final states of the confinement process vanishes (we will see later that this is the case in our particular system). A reduction of entropy then corresponds to an increase of free energy
. This increase in free energy could then be extracted as work in an isothermal expansion. However, the whole process cannot operate as a motor, as this will defeat the second law (extracting work from a single thermal bath). Indeed, the second law states for the confinement
and then for the isothermal expansion back to the initial state (
)
so that
and the system dissipates energy into the thermal bath.
However, as explained above, when measuring and feeding back to the system,
W is bounded by (
1) instead. Thus, the work that is needed for the confinement may be reduced and the work output of the cyclic process (
) may be negative:
Notice that mutual information is always a positive quantity.
Following [
2], we propose a reversible feedback confinement that can confine the particle with
and, as will be shown later (see Equation (
13)), without dissipating heat to the thermal bath, so that the increase in free energy that is produced by the confinement can later be completely recovered as work during a quasistatic expansion in stage 2.
For a system that is in contact with a thermal bath, a feedback process is reversible if the Hamiltonian is modified after the measurement, so that probability of the state of the system conditioned on the measurement outcome is the Gibbsian state of the new Hamiltonian. After a measurement, the probability to find a given state changes instantaneously, the new probability distribution takes into account the information obtained, and ut must be updated according to Bayesian inference. If the Hamiltonian also changes rapidly and the Gibbs state of the new Hamiltonian matches the posterior probability distribution, the system remains at equilibrium and no further evolution of the probability distribution ensues until a new measurement is taken.
In our model, we take the common assumption of Gaussian measurement errors. If the particle is located at a position
x, then the measurement outcome
m is Gaussian distributed around
x and the dispersion
quantifies the measurement error:
After a measurement, the probability distribution of the position of the particle updates according to Bayes’ theorem from the initial distribution
:
where
is the marginal distribution of the measurement outcome.
For a Brownian particle in a time-independent potential, the equilibrium distribution is its corresponding Gibbs distribution:
In a harmonic potential, it is a Gaussian, centered in the trap position
and with variance being given by
. It can be shown [
7] that, after a measurement, the new distribution that is computed according to (
7) remains Gaussian. If the initial distribution has mean
and standard deviation
, after a measurement, then the distribution updates to a Gaussian with the mean and deviation given by [
2]:
We can make the post-measurement distribution an equilibrium distribution by setting a new center of the trap position
and stiffness
, as
Notice that ; hence, the particle is more tightly bound or confined after this change. Additionally, Equation (10) implies , so that every measurement and feedback step further reduces the variance of the particle distribution.
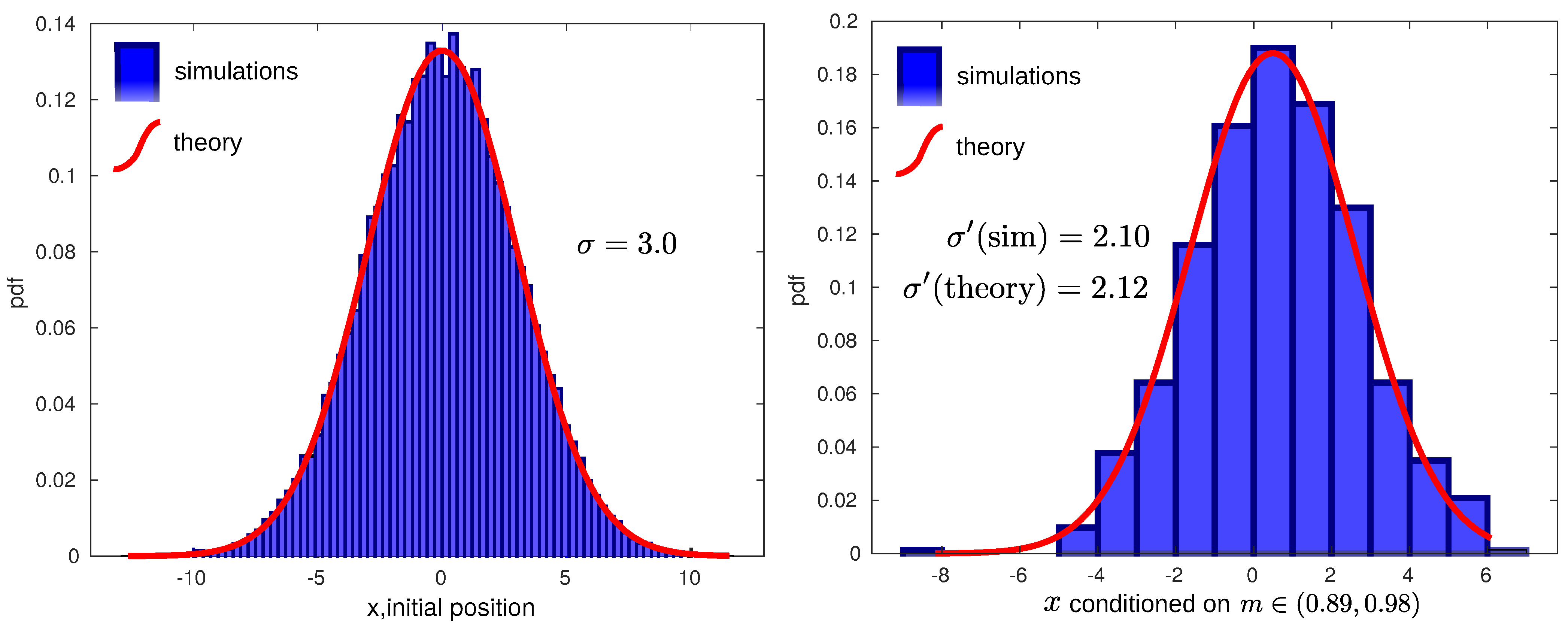
In order to check this reduction of variance in simulation, we have computed the particle distribution after a measurement. For this, we first generate a large number of trajectories, starting from an initial equilibrium distribution for a harmonic potential centered in position
and corresponding dispersion
, as depicted in
Figure 1(left). After some time interval, for each trajectory, we measure its position by generating a (Gaussian) random measurement outcome
m around the actual position
x with dispersion
(see the details in
Section 5). We can then fix a small interval around a given measurement of the position
of our choice, for instance (0.89, 0.98), and only check the realizations that gave a measurement in that interval. The distribution of the actual positions
x of these particular realizations are distributed as in (
7). In our case, a Gaussian with new reduced standard deviation
is given by (10). This can be seen in
Figure 1 (right).
This process of measurement and feedback can be repeated and a new, more confined state could be achieved.
Figure 2 (top) shows the confining effect of repeating this procedure.
In every measurement and feedback step, the trapped Brownian particle stays in equilibrium with the thermal bath at temperature
T. Consequently, the average energy is not modified by the feedback process. The average internal energy
E of a trapped particle in one dimension is given by the equipartition theorem, as
. Because the process is isothermal,
. On the other hand, always being in equilibrium, there is no relaxation of the particle distribution and the heat that is transferred from the heat bath vanishes on average
. Therefore, according to the first law, the average work done on the system also vanishes:
This has been checked in simulations, as shown in
Figure 2 (bottom). Details about work computation during measurement and feedback can be found in
Section 5.
In general, for other feedback protocols where the stiffness of the trap is suddenly changed, work is performed, on average [
21], as in the simple example described after Equation (
2). The feedback process used here is different (in addition to a sudden increase of stiffness, trap position is also modified in a precisely combined manner) and it is special in the sense that average work vanishes. As encoded in Equation (
1), this can solely be achieved by using information regarding the position through measurement in the feedback (see Equation (
9) for the new trap position). To see why this matters, consider our Brownian particle in a harmonic potential, where the observer happens to know that the particle is exactly at the bottom of the well. This would allow for this external agent to increase the stiffness of the potential well with an abrupt change, without performing work, since the energy of the particle is always zero at the bottom of the well, for any stiffness. The confining protocol is a refinement of this idea that works for any position of the particle, by displacing the bottom of the potential well towards the measured particle position and changing the stiffness in a suitable manner.
Furthermore, one can compute the mutual information that is obtained in the process of measurement and evaluate the increase in free energy
for the confinement stage. From the definition of mutual information:
When considering that the measurement outcome distribution
and the marginal distribution
are Gaussian with variance
and
, respectively, the information that is acquired in a measurement is
Mutual information intuitively measures the decrease in uncertainty of variable
x if we know the value of
m, or vice versa [
22]. In our case, from (10), if the measurement error
is very large then
and we extract almost no information from measuring (
). Conversely, for infinite precise measurement
, then
, and we obtain infinite information from a measurement, as an infinite precise description of a position would require an infinite number of bits to store it.
The entropy of a Gaussian of variance
is
. In the measurement process, the distribution changes from a Gaussian of variance
to a Gaussian of variance
, and we have
Because
, we finally obtain
This is valid for every measurement and feedback step while using the reversible feedback protocol. In a sequence of confinement steps with successive variances
, the total information is
can be obtained from (10) by recursion, giving:
Finally, the free energy difference between the final and initial states in the confinement stage is
Every bit of information that is extracted in the measurement is turned into an increase of free energy during the confinement stage and it can be converted into useful work in the subsequent expansion.
2.2. Work Extraction by Isothermal Expansion
If an external agent changes the stiffness of the optical trap from
to
, energy is recovered as work, as explained above. In a quasistatic process, the work done by the system is given by the free energy difference. Because stage 2 completes the cycle of operation of the motor ending in the initial state, we have
and
which corresponds to extracted work. In fact, it saturates expression (
5) and it is the maximum possible work that can be extracted while using the information that was obtained in the measurements.
This result can also be recovered by the direct computation of the work of a process changing stiffness from
to
and while taking into account that, for a quasistatic process, one can use the equipartition theorem stating
, with
the instantaneous value of the stiffness. Subsequently, the average work during the expansion, according to (
2), reads:
The expansion starts at the end of the confinement process with a distribution of variance
and ends at
. Subsequently, while using the relation between stiffness and variance in the confinement stage (
11), we have
Notice that during both the confinement and expansion the system must be at equilibrium in order to transform every bit of information into useful work.
In practice, though, for a process changing the stiffness of the potential to be approximately quasistatic, it is enough that the time of the process is large compared to the inverse frequency of the trap given by
. This is the criterion that we have used for simulations. Additionally, it is worth noting that, even though the work in every realization of the expansion may differ in principle in a stochastic system, work is—in this particular example—a self-averaging quantity: for a quasistatic expansion, the total work obtained in any realization is very similar to its average value. The argument for self-averaging of the work is the following: from work definition (
2), work in a single realization when expanding is
. If the expansion is very slow, in the time
is modified a certain small amount, the particle position has time to fluctuate and sample the whole quasi-equilibrium distribution and
approximately can be replaced by its average value (see the full computation in [
14]).
Figure 3 depicts the complete diagram of the proposed cycle.
Finally, one could also define an efficiency
as the ratio between the extracted thermodynamic resource (work) and the thermodynamic resource consumed to make the engine run, in this case information. With this definition, this reversible feedback engine attains the maximum efficiency:
as in a similar system [
23], with just one measurement per cycle.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





