1. Introduction
High Voltage (HV) equipment uses a variety of insulating materials for protecting the system and have dielectric media that are either solid, liquid, or gas depending on the design requirements of HV equipment. Insulation deterioration could advance further to physical and chemical degradation of the local and adjacent insulation, which may result in failure of the entire insulation, leading to failure of the power system equipment [
1]. Due to the high voltage stress, localized dielectric breakdown of a small portion of an insulator occurs, resulting in a Partial Discharge (PD) signal. As a part of the condition-based maintenance plan for HV equipment, PD monitoring is an effective and non-destructive diagnostic tool that helps to assess the condition of HV equipment. Hence, PD measurements in generators, HV cables, motors, switch gears, transformers, etc., are carried out during operating (on-line measurement) conditions. The most common issue faced during on-line PD measurements is the interference of external signal referred as noise, which sometimes has a very high amplitude compared to the PD signal [
2,
3]. The most common on-site noise signals reported during PD measurements are noise from corona discharge, white Gaussian noise, thermal noise, pink noise, and high-frequency signal interference from communication equipment, commonly referred to as Discrete Spectral Interference (DSI) [
4,
5].
In the past few years, many researchers proposed signal decomposition based denoising algorithms in various engineering disciplines, the usage of such techniques being applied to PD signals, such as Wavelet Transform (WT) [
4,
5,
6,
7,
8,
9], Empirical Mode Decomposition (EMD) and its variants [
10,
11], Adaptive Local Iterative Filtering (ALIF) [
12] and Variational Mode Decomposition (VMD) [
13,
14,
15]. WT is the one of the most widely used decomposition method in various domains. In [
4,
5] the authors applied hard and soft thresholding on the coefficients of the wavelet transform, this was then extended by Ghorat et al. in [
9] as Adaptive Dual Tree Complex Wavelet Transform (ADTCWT) with an automatic threshold by applying adaptive singular value decomposition. Wavelet denoising methods rely on the type and order of the wavelet, the level of decomposition, and threshold type, which needs parameter tuning and the performance depends on effective selection of those parameters. The selection of the mother wavelet is critical in the wavelet denoising method as seen in literature [
5,
7], the Energy Based Wavelet Selection (EBWS) method [
6], Correlation Based Wavelet Selection (CBWS) method [
6,
8], and Signal-to-Noise Ratio (SNR) Based Wavelet Selection (SNRBWS) method [
8]. Daubechies as the mother wavelet is effective in denoising PD signals mixed with DSI and white noise. However, denoising by thresholding of wavelet coefficients often introduces some artifacts such as spurious noise spikes and pseudo-Gibbs oscillation, which hinders the performance of these methods.
Apart from the usage of WT, many adaptive signal decomposition techniques were used in denoising applications [
16]. Empirical Mode Decomposition (EMD) proposed by Huang et al. [
17] is used in PD denoising [
10], and its variant Novel Adaptive Ensemble EMD (NAEEMD) is applied for denoising PD signals [
11]. The EMD method proved to be powerful in extracting IMFs from the given signal, however, other issues such as high computation time, error accumulation, mode mixing, and end effects are reported in [
18]. Ensemble EMD (EEMD) [
19] and Complete Ensemble EMD with Adaptive Noise (CEEMDAN) [
20] has been developed based on EMD, however, all the issues mentioned above have not been fully addressed. To avoid such issues, Dragomiretskiy and Zosso [
21] proposed VMD, an algorithm, which is a non-recursive decomposition method that decomposes a multi-component input signal into a set of Band Limited IMFs (BLIMFs). The PD signal is acquired through a sensor circuit that contains PD pulses with different frequency levels and various noise sources. The VMD method can decompose the sensor signal into a set of BLIMFs, which is beneficial in terms of analysing the decomposed PD signal. A recent and comprehensive review of EMD, EEMD, CEEMDAN, and VMD methods presented in [
22] lists several advantages of VMD methods and suggests the VMD method for applications to the vibration-based condition monitoring of mechanical systems. The VMD has also been utilised in PD signal denoising in [
13,
14,
15] where an optimised VMD and wavelet (OVMDW) is applied in denoising UHF PD signals [
13], and the hybrid of VMD and Wavelet Packet Transform (WPT) were applied to synthetic, real-time PD signal denoising [
14]. However, in both methods only white noise was addressed. The PD fault diagnosis procedure proposed in [
15] has VMD as the decomposition technique followed by feature extraction from the selected IMFs to train a classifier.
The entropy proposed by Shannon [
23] is an effective and widely used measure to study the randomness or uncertainty of time series data. Many forms of entropy measures are used in denoising methods. In adaptive denoising methods, Mutual Information (MI) entropy is commonly used for analyzing the frequency between IMFs to select the specific IMFs for further processing [
24,
25,
26]. The MI of phase spectra between consecutive IMFs is presented to decide stochastic or deterministic components present in IMFs [
27]. The spectral density initial IMFs of EMD are spread moderately across the frequency spectrum. However, to the best of the author’s knowledge, no experimental studies have been carried out to compare it against VMD.
Permutation Entropy (PE) is a measure for arbitrary time series based on analysis of permutation patterns [
28], which reflects the complexity of the signal used in PD denoising [
29], however it only considers the order of amplitude values and does not consider the differences between amplitude values. Dispersion Entropy (DE) is an improved version of PE [
30], which is used for analyzing various signal properties such as amplitude, frequency and noise-power [
29]. The DE along with MIE is used to identify noisy, noise-dominant, and signal-dominant IMFs for further processing.
Recently, sparse representation has become widely used in signal processing applications. Rudin et al. proposed a total variation denoising method based on an optimization problem for the removal of noise in 2-dimensional data, i.e., image [
31] and T. Figueiredo et al. introduced Majorization-Minimization (MM) algorithm for denoising an image [
32]. Selesnick and Chen and Condat [
33,
34] proposed an one dimensional Total Variation Denoising (TVD) algorithm applied in vibration signal denoising [
35] and partial discharge signal denoising [
3,
36]. Selesnick and Chen proposed an iterative Group-Sparse Total Variation (GSTV) algorithm derived using MM optimization method, which is suitable when the estimated signal to the group is sparse. GSTV is designed to alleviate the staircase artifact often arising in the TVD. GSTV is computationally efficient due to the use of fast solvers for the banded system, and applied for PD signal denoising in [
37].
In this paper, a new denoising method, VMD-GSTV, is presented to remove the various contaminating noise sources from partial discharge signals. A comparative analysis of EMD-Detrended Fluctuation Analysis (EMD-DFA) [
38], Complete Ensemble EMD with Adaptive Noise (CEEMDAN) [
20], EMD-GSTV, and VMD-GSTV are conducted, and the algorithms are applied to the simulated synthetic signals and real PD data. The performance indices of these algorithms are computed and presented.
The rest of this paper is organised as follows: PD measurement setup and source of disturbances in PD measurement are discussed in
Section 2. The proposed method followed by the techniques used such as VMD, MI, DE, and GSTV methods are briefly introduced in
Section 3. Applications of the VMD-GSTV to synthetic and real-world signals are presented in
Section 4. The simulation results and testing are presented in
Section 5, discussion and conclusion are in
Section 6 and
Section 7, respectively.
2. PD Measurement
According to the IEC60270 standard [
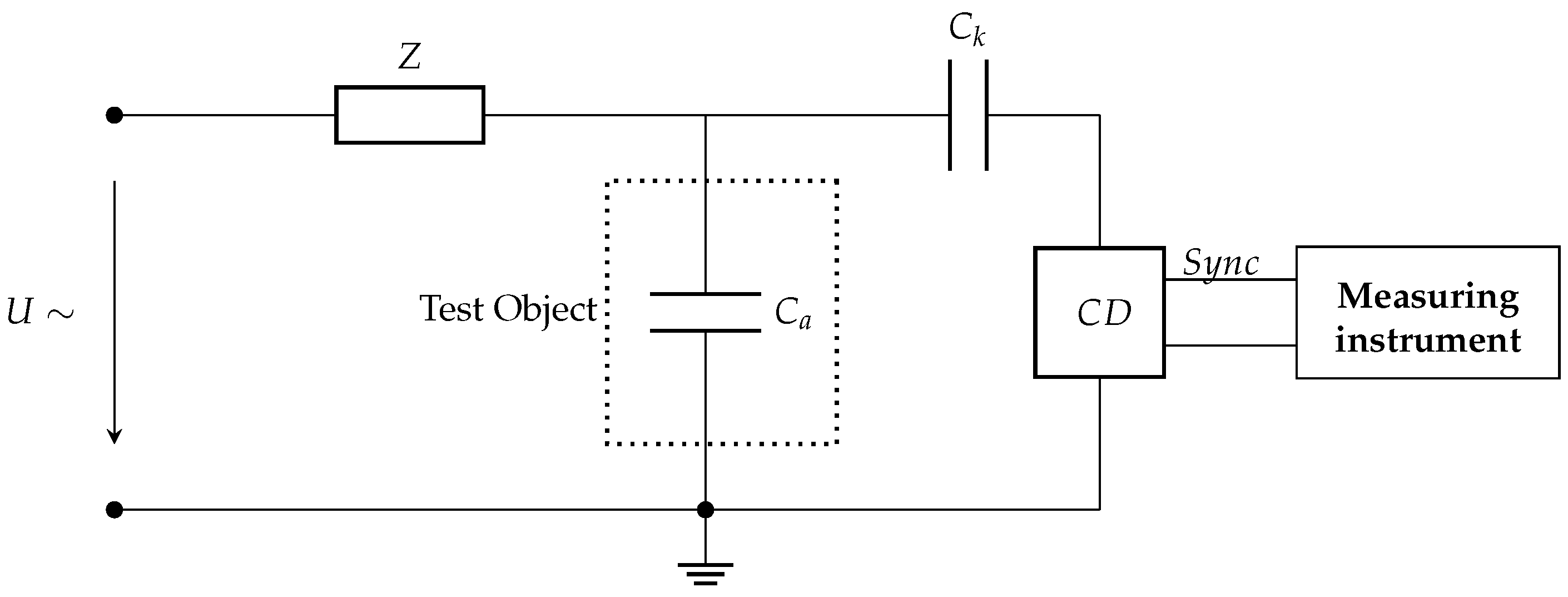
39], the most common techniques used for PD measurement are electrical, ultra-high frequency measurement, acoustic emission, and the high frequency current transformer (HFCT) sensor method. Each type exhibits a different behavior in terms of pulse type, width, rise, and decay time. A typical electric PD measurement setup with the test object is shown in
Figure 1, which is one of the most popular methods used in controlled areas such as laboratories. In the PD measurement setup,
U∼ is the high-voltage power supply,
Z is the filter, and
is the test object. The coupling capacitor
allows flow of short PD current pulse, and the matching impedance
of Coupling Device (CD) converts the PD current pulses into voltage pulses. The matching impedance,
is either RC circuit for wide-band PD detection or RLC circuit for narrow-band detection as shown in
Figure 2. The detector outputs different pulse shapes based on the type of detection circuit, which is realized as the natural response of either parallel RC or RLC circuit [
7,
40]. These are Damped Exponential Pulse (DEP) and Damped Oscillatory Pulse (DOP).
Sources of Disturbances in PD Measurement
A typical PD measurement system contains a sensor, an amplifier, an oscilloscope, and a computer for data acquisition and processing of data. HFCTs are often used as sensor in non-invasive PD measurement systems, which is clamped around the conductor that connects the cable to the ground. According to the IEC60270 standard [
39], the main source of noise in PD measurement is background noise, which does not originate in the test object. Background noise comes in the form of either white noise in the measurement system, high-frequency signal interference from radio broadcasts, or due to the switching operations in other circuits or commutating machines, etc. [
39]. The external interference in PD measurements can lead to the wrong detection of PD signals due to the larger magnitude than the PD signal. The on-site noise and disturbance can be classified as:
White noise—a random noise signal that has same power at all frequencies. The thermal noise generated by the detection system and the noise sources such as ambient noise and amplifier noise are considered as white noise. a detailed discussion can be found in [
2,
5,
41];
DSI—the interference from radio transmission such as communication and amplitude modulation/frequency modulation ratio emissions. A detailed discussion is found in [
7];
Pink (or
) noise is a signal with a power spectral density that is inversely proportional to the frequency of the signal. Detailed discussion can be found in [
24].
In this work, DOP and DEP models along with white noise, DSI, and color noise is considered for implementation. Apart from this, the proposed denoising method is evaluated using the standard test signals such as Blocks, Bumps, Doppler, Heavy Sine, and real PD data. The simulation models with the parameter settings will be discussed later in this paper.
7. Conclusions
In this paper, a new denoising method is proposed which combines VMD, statistical features such as MI, DE, and the GSTV denoising algorithm. Our approach is to decompose the signal using VMD with the mode parameter set by number of EMD IMFs with MI analysis, later VMD IMFs are also analyzed using MI to group noise-dominant and signal-dominant IMFs. Based on the DE values of the noise-dominant IMFs, the IMFs are filtered using GSTV with appropriate value to create the output vector. The signal-dominant IMFs are directly added to the output vector to create the denoised signal.
Using simulated and real data, the proposed method VMD-GSTV can remove the noise in the given signal while retaining the signal features. The proposed method is having better output SNR, RMSE and CC parameters in most signals as compared to the other methods considered in this paper. The output SNR of the proposed method is 4 to 13% higher than other methods for the input SNR of −5 dB, this indicates that the proposed method performs better under extreme noisy conditions. Furthermore, this method is applied to denoise synthetic PD DOP and PD DEP signal and real PD data of corona, surface, and void discharges. As per the observation, the proposed method has the ability to denoise the PD signals with low amplitude, buried white noise, DSI, and pink noise.
The application of other entropy methods such as Multiscale Dispersion Entropy (MDE), Refined Composite Multiscale Dispersion Entropy (RCMDE), and other decomposition methods such as ALIF and Empirical Wavelet Transform (EWT) will be considered in future work.


 ,
, 
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}