
On-Road Detection of Driver Fatigue and Drowsiness during Medium-Distance Journeys

 ,
, 
Abstract
:1. Introduction
2. Materials and Methods
2.1. Drowsy Driving Accident Prediction
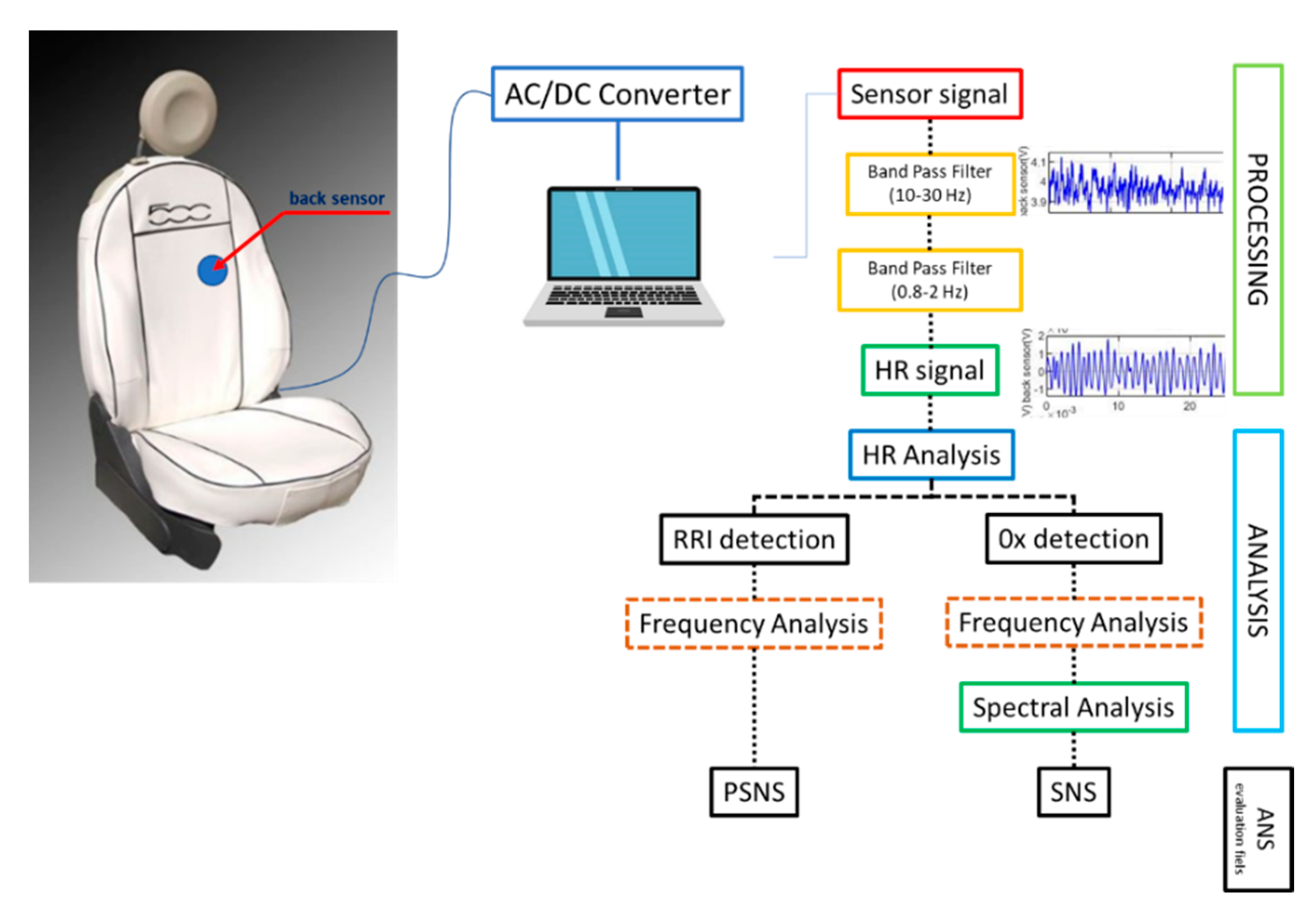
2.2. Detection System
2.3. Analytical Model
2.4. Drowsiness Scale
3. Results
3.1. Experiments
3.1.1. Experimental Environment
3.1.2. Experiment Subjects
3.1.3. Data Acquisition
3.1.4. Experimental Procedure
3.2. Experimental Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Informed Consent Statement
Conflicts of Interest
References
- European Sleep Research Society: Sleepiness at the Wheel. ASFA. 2013. Available online: https://esrs.eu/wp-content/uploads/2018/09/Livre_blanc_VA_V4.pdf (accessed on 19 January 2021).
- European Commission, Driver Distraction, European Commission, Directorate General for Transport, September 2015. Available online: https://ec.europa.eu/transport/road_safety/sites/roadsafety/files/ersosynthesis2015-driverdistraction25_en.pdf (accessed on 19 January 2021).
- Connor, J.; Norton, R.; Ameratunga, S.; Robinson, E.; Civil, I.; Dunn, R.; Jackson, R. Driver sleepiness and risk of serious injury to car occupants: Population based case control study. BMJ 2002, 324, 1125. [Google Scholar] [CrossRef] [Green Version]
- Slater, J.D. A definition of drowsiness: One purpose for sleep? Med. Hypotheses 2008, 71, 641–644. [Google Scholar] [CrossRef]
- Brown, I.D. Driving fatigue. Endeavour 1982, 6, 83–90. [Google Scholar] [CrossRef]
- Johns, M.W.; Chapman, R.; Crowley, K.; Tucker, A. A new method for assessing the risks of drowsiness while driving. Somnologie 2008, 12, 66–74. [Google Scholar] [CrossRef]
- Borghini, G.; Astolfi, L.; Vecchiato, G.; Mattia, D.; Babiloni, F. Measuring neurophysiological signals in aircraft pilots and car drivers for the assessment of mental workload, fatigue and drowsiness. Neurosci. Biobehav. Rev. 2014, 44, 58–75. [Google Scholar] [CrossRef] [PubMed]
- Daza, I.G.; Bergasa, L.M.; Bronte, S.; Yebes, J.J.; Almazán, J.; Arroyo, R. Fusion of optimized indicators from Advanced Driver Assistance Systems (ADAS) for driver drowsiness detection. Sensors 2014, 14, 1106–1131. [Google Scholar] [CrossRef]
- Picot, A.; Charbonnier, S.; Caplier, A. On-line detection of drowsiness using brain and visual information. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2012, 42, 764–775. [Google Scholar] [CrossRef]
- Correa, A.G.; Orosco, L.; Laciar, E. Automatic detection of drowsiness in EEG records based on multimodal analysis. Med. Eng. Phys. 2014, 36, 244–249. [Google Scholar] [CrossRef] [PubMed]
- Li, G.; Chung, W.Y. A context-aware EEG headset system for early detection of driver drowsiness. Sensors 2015, 15, 20873–20893. [Google Scholar] [CrossRef] [PubMed]
- Zhang, C.; Wang, H.; Fu, R. Automated detection of driver fatigue based on entropy and complexity measures. IEEE Trans. Intell. Transp. Syst. 2014, 15, 168–177. [Google Scholar] [CrossRef]
- Salvati, L.; d’Amore, M.; Fiorentino, A.; Pellegrino, A.; Sena, P.; Villecco, F. Development and Testing of a Methodology for the Assessment of Acceptability of LKA Systems. Machines 2020, 8, 47. [Google Scholar] [CrossRef]
- Li, W.; Young-Chung, G. Detection of driver drowsiness using wavelet analysis of heart rate variability and a support vector machine classifier. Sensors 2013, 13, 16494–16511. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jung, S.J.; Shin, H.S.; Chung, W.Y. Driver fatigue and drowsiness monitoring system with embedded electrocardiogram sensor on steering wheel. IET Intell. Transp. Syst. 2014, 8, 43–50. [Google Scholar] [CrossRef]
- McDonald, A.D.; Schwarz, C.; Lee, J.D.; Brown, T.L. Real-time detection of drowsiness related lane departures using steering wheel angle. Proc. Hum. Factors Ergon. Soc. Annu. Meet. 2012, 56, 2201–2205. [Google Scholar] [CrossRef] [Green Version]
- Nagai, F.; Omi, T.; Komura, T. Driver sleepiness detection by video image processing. In Proceedings of the FISITA 2008 World Automotive Congress, Munich, Germany, 14–19 September 2008. [Google Scholar]
- Dikkers, H.J.; Spaans, M.A.; Datcu, D.; Novak, M.; Rothkrantz, L.J.M. Facial Recognition System for Driver Vigilance Monitoring. In Proceedings of the IEEE SMC, The Hague, The Netherlands, 10–13 October 2004. [Google Scholar]
- Tianyi, M.A.; Cheng, B. Detection of driver’s drowsiness using facial expression features. J. Automot. Saf. Energy 2010, 1, 200–204. [Google Scholar]
- Minjie, W.; Ping, M.; Caiyan, Z. Driver fatigue detection algorithm based on the states of eyes and mouth. Comput. Appl. Softw. 2013, 30, 25–27. [Google Scholar]
- King, D.J.; Siegmund, G.P.; Montgomery, D.T. Outfitting a Freightliner Tractor for Measuring Driver Fatigue and Vehicle Kinematics during Closed-Track Testing; SAE Technical Paper: Warrendale, PA, USA, 1994. [Google Scholar]
- Wierwille, W.W.; Lewin, M.G.; Fairbanks, R.J. Research on Vehicle-Based Driver Status/Performance Monitoring; The National Academies of Sciences, Engineering, and Medicine: Washington, DC, USA, 1996. [Google Scholar]
- Wierwille, W.W.; Ellsworth, L.A.; Wreggit, S.S.; Fairbanks, R.J.; Kirn, C.L. Research on Vehicle-Based Driver Status/Performance Monitoring Development, Validation, and Refinement of Algorithms for Detection of Driver Drowsiness; Office of Crash Avoidance Research National Highway Traffic Safety Administration: Washington, DC, USA, 23 December 1994.
- Wierwille, W.W.; Ellsworth, L.A. Evaluation of driver drowsiness by trained raters. Accid. Anal. Prev. 1994, 26, 571–581. [Google Scholar] [CrossRef]
- Sahayadhas, A.; Sundaraj, K.; Murugappan, M. Detecting driver drowsiness based on sensors: A review. Sensors 2012, 12, 16937–16953. [Google Scholar] [CrossRef] [Green Version]
- Formato, A.; Guida, D.; Ianniello, D.; Villecco, F.; Lenza, T.L.; Pellegrino, A. Design of Delivery Valve for Hydraulic Pumps. Machines 2018, 6, 44. [Google Scholar] [CrossRef] [Green Version]
- Trinder, J.; Kleiman, J.; Carrington, M.; Smith, S.; Breen, S.; Tan, N.; Kim, Y. Autonomic activity during human sleep as a function of time and sleep stage. J. Sleep Res. 2001, 10, 253–264. [Google Scholar] [CrossRef] [Green Version]
- Versace, F.; Mozzato, M.; De Min Tona, G.; Cavallero, C.; Stegagno, L. Heart rate variability during sleep as a function of the sleep cycle. Biol. Psychol. 2003, 63, 146–162. [Google Scholar] [CrossRef]
- Camm, A.J. Guidelines. Heart rate variability. Standards of measurement, physiological interpretation, and clinical use. Eur. Heart J. 1996, 115, 354–381. [Google Scholar]
- Jurysta, F.; van de Borne, P.; Migeotte, P.F.; Dumont, M.; Lanquart, J.P.; Degaute, J.P.; Linkowski, P. A study of the dynamic interactions between sleep EEG and heart rate variability in healthy young men. Clin. Neurophysiol. 2003, 114, 2146–2155. [Google Scholar] [CrossRef]
- Tobaldini, E.; Nobili, L.; Strada, S.; Casali, K.R.; Braghiroli, A.; Montano, M. Heart rate variability in normal and pathological sleep. Front. Physiol. 2013, 4, 294. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Oron-Gilad, T.; Ronen, A.; Shinar, D. Alertness maintaining tasks (AMTs) while driving. Accid. Anal. Prev. 2008, 40, 851–860. [Google Scholar] [CrossRef] [PubMed]
- Sun, X.; Liu, H.; Song, W.; Villecco, F. Modeling of Eddy Current Welding of Rail: Three-Dimensional Simulation. Entropy 2020, 22, 947. [Google Scholar] [CrossRef]
- Chui, K.T.; Tsang, K.F.; Chi, H.R.; Ling, B.W.K.; Wu, C.K. An accurate ECG-based transportation safety drowsiness detection scheme. IEEE Trans. Ind. Inform. 2016, 12, 1438–1452. [Google Scholar] [CrossRef]
- Lee, H.B.; Choi, J.M.; Kim, J.S.; Kim, Y.S.; Baek, H.J.; Ryu, M.S.; Sohn, R.Y.; Park, K.S. Nonintrusive Biosignal Measurement System in a Vehicle. In Proceedings of the 29th Annual International Conference of the IEEE EMBS Cite Internationale, Lyon, France, 23–26 August 2007. [Google Scholar]
- Lee, B.G.; Jung, S.J.; Chung, W.Y. Real-time physiological and vision monitoring of vehicle driver for non-intrusive drowsiness detection. IET Commun. 2011, 5, 2461–2469. [Google Scholar] [CrossRef]
- Bos, J.E.; Bles, W.; Groen, E.L. A theory on visually induced motion sickness. Displays 2008, 29, 47–57. [Google Scholar] [CrossRef]
- Akerstedt, T.; Peters, B.; Anund, A.; Kecklund, G. Impaired alertness and performance driving home from the night shift: A driving simulator study. J. Sleep Res. 2005, 14, 17–20. [Google Scholar] [CrossRef]
- Bhuiyan, M.S. Driver assistance systems to rate drowsiness: A preliminary study. New Adv. Intell. Decis. Technol. 2009, 199, 415–425. [Google Scholar]
- Dinges, D. PERCLOS: A Valid Psychophysiological Measure of Alertness as Assessed by Psychomotor Vigilance; Tech. Rep. MCRT-98-006; Federal Highway Administration, Office of Motor Carriers: Washington, DC, USA, 1998.
- Vitabile, S.; Paola, A.D.; Sorbello, F. A real-time non-intrusive FPGA-based drowsiness detection system. J. Ambient Intell. Humaniz. Comput. 2011, 2, 251–262. [Google Scholar] [CrossRef]
- Hayami, T.; Katsuya, M. Detecting drowsiness while driving by measuring eye movement—A pilot study. In Proceedings of the IEEE 5th International Conference on Intelligent Transportation Systems, Singapore, 6 September 2002. [Google Scholar]
- Formato, G.; Romano, R.; Formato, A.; Sorvari, J.; Koiranen, T.; Pellegrino, A.; Villecco, F. Fluid–Structure Interaction Modeling Applied to Peristaltic Pump Flow Simulations. Machines 2019, 7, 50. [Google Scholar] [CrossRef] [Green Version]
- Sharma, N.; Banga, V.K. Development of a drowsiness warning system based on the fuzzy logic. Int. J. Comput. Appl. 2010, 8, 1–6. [Google Scholar] [CrossRef]
- Lenskiy, A.A.; Lee, J.S. Driver’s eye blinking detection using novel color and texture segmentation algorithms. Int. J. Control Autom. Syst. 2012, 10, 317–327. [Google Scholar] [CrossRef]
- Fujita, E.; Ogura, Y.; Ochiai, N.; Yasuda, E.; Doi, S.; Murata, K.; Kamei, T.; Ueno, Y.; Kaneko, S. Development of simplified appraisal method of fatigue on sitting for extended periods by the data of finger plethysmogram. Jpn. Ergon. Soc. 2004, 40, 254–263. [Google Scholar] [CrossRef]
- Murata, K.; Fujita, E.; Kojima, S.; Maeda, S.; Ogura, Y.; Kamei, T.; Tsuji, T.; Kaneko, S.; Yoshizumi, M.; Suzuki, N. Noninvasive biological sensor system for detection of drunk driving. IEEE Trans. Inf. Technol. Biomed. 2011, 15, 19–25. [Google Scholar] [CrossRef]
- Naviglio, D.; Formato, A.; Scaglione, G.; Montesano, D.; Pellegrino, A.; Villecco, F.; Gallo, M. Study of the Grape Cryo-Maceration Process at Different Temperatures. Foods 2018, 7, 107. [Google Scholar] [CrossRef]
- Liguori, A.; Armentani, E.; Bertocco, A.; Formato, A.; Pellegrino, A.; Villecco, F. Noise Reduction in Spur Gear Systems. Entropy 2020, 22, 1306. [Google Scholar] [CrossRef]
- Sagberg, F.; Sagberg, F.; Jackson, P.; Krüger, H.; Muzet, A.; Williams, A. Fatigue, Sleepiness and Reduced Alertness as Risk Factors in Driving; Institute of Transport Economics: Oslo, Norway, 2004. [Google Scholar]
- Villecco, F.; Aquino, R.P.; Calabro, V.; Corrente, M.I.; Grasso, A.; Naddeo, V. Fuzzy-assisted ultrafiltration of wastewater from milk industries. In Frontiers in Water-Energy-Nexus—Nature-Based Solutions, Advanced Technologies and Best Practices for Environmental Sustainability. Advances in Science, Technology and Innovation (IEREK Interdisciplinary Series for Sustainable Development); Naddeo, V., Balakrishnan, M., Choo, K.H., Eds.; Springer: Cham, Switzerland, 2020; pp. 239–242. [Google Scholar]
- Villecco, F.; Aquino, R.P.; Calabro, V.; Corrente, M.I.; d’Amore, M.; Grasso, A.; Naddeo, V. Fuzzy-assisted ultrafiltration of whey by-products recovery. Euro-Mediterr. J. Environ. Integr. 2020, 5. [Google Scholar] [CrossRef]
- J Hagiyama, N.; Mito, A.; Hirano, H. Unconstrained Monitoring of Biological Signals Using an Aortic Pulse Wave Sensor. In Proceedings of the 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Honolulu, HI, USA, 18–21 July 2018. [Google Scholar]
- Hagiyama, N.; Hirano, H.; Mito, A. Unconstrained Vital Sign Monitoring System Using an Aortic Pulse Wave Sensor. Sci. Rep. 2019, 9, 17475. [Google Scholar] [CrossRef] [PubMed]
- Furman, G.; Baharav, A.; Cahan, C.; Akselrod, S. Early detection of falling asleep at the wheel: A heart rate variability approach. In Proceedings of the 2008 Computers in Cardiology, Bologna, Italy, 14–17 September 2008; pp. 1109–1112. [Google Scholar]
- Shin, H.S.; Jung, S.J.; Kim, J.; Chung, W.Y. Real Time Car Driver’s Condition Monitoring System. In Proceedings of the IEEE Sensors Conference, Waikoloa, HI, USA, 1–4 November 2010; pp. 951–954. [Google Scholar]
- Baharav, A.; Kotagal, S.; Gibbons, V.; Rubin, B.K.; Pratt, G.; Karin, J.; Akselrod, S. Fluctuations in autonomic nervous activity during sleep displayed by power spectrum analysis of heart rate variability. Neurology 1995, 45, 1183–1187. [Google Scholar] [CrossRef] [PubMed]
- Serrador, J.M.; Finlayson, H.C.; Hughson, R.L. Physical activity is a major contributor to the ultra low frequency components of heart rate variability. Heart 1999, 82, e9. [Google Scholar] [CrossRef] [PubMed]
- Fujita, E.; Ogura, Y.; Ochiai, N.; Miao, T.; Shimizu, T.; Kamei, T.; Murata, K.; Ueno, Y.; Kaneko, S. Development of the measurement method of the prediction of sleep by finger plethysmogram data. Jpn. J. Ergon. 2005, 41, 203–212. [Google Scholar]
- Ochiai, N. The Application to Fatigue and Sleep Prediction of The Signal of Biological Fluctuation Measured from Noninvasive Sensor. In Proceedings of the 39th Japan Ergonomics Society Chugoku and Shikoku Branch Convention, Collection of Literatures and Papers, Japan Ergonomics Society Chugoku and Shikoku Branch Secretariat, 25 November 2006. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Karolinska Sleepiness Scale | Post-Processed Sleepiness Scale | |||
|---|---|---|---|---|
| Level | Verbal Description | Vigilance Stage | Level | Verbal Description |
| 1 | extremely alert | alertness | 0 | negligible signs of fatigue |
| 2 | very alert | 1 | ||
| 2 | ||||
| 3 | alert | 3 | ||
| 4 | ||||
| 4 | rather alert | hypovigilance | 5 | slight fatigue |
| 5 | neither alert nor sleepy | 6 | ||
| 6 | some signs of sleepiness | 7 | ||
| 8 | ||||
| 7 | sleepy, but no effort to keep alert | drowsiness | 9 | increasing fatigue and drowsiness |
| 8 | sleepy, some effort to keep alert | 10 | ||
| 11 | slight drowsiness | |||
| 9 | extremely sleepy, fighting sleep | 12 | strong drowsiness | |
| Driver | Test | n° of Detections | Match | Matching with the Last 5-min Trend of Scores | Matching with the Last 90-s Trend of Scores |
|---|---|---|---|---|---|
| A | 1 | 19 | 13 | 9 | 12 |
| 2 | 18 | 11 | 7 | 11 | |
| 3 | 20 | 12 | 9 | 9 | |
| 4 | 21 | 14 | 10 | 12 | |
| 5 | 20 | 12 | 8 | 13 | |
| B | 1 | 18 | 12 | 9 | 10 |
| 2 | 19 | 13 | 9 | 12 | |
| 3 | 18 | 12 | 7 | 12 | |
| 4 | 18 | 12 | 8 | 10 | |
| 5 | 19 | 10 | 6 | 7 | |
| C | 1 | 22 | 13 | 9 | 10 |
| 2 | 22 | 12 | 8 | 8 | |
| 3 | 21 | 14 | 9 | 11 | |
| 4 | 20 | 12 | 7 | 9 | |
| tot | 14 | 275 | 172 | 115 | 146 |
| Success % | 63 | 44 | 56 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Salvati, L.; d’Amore, M.; Fiorentino, A.; Pellegrino, A.; Sena, P.; Villecco, F. On-Road Detection of Driver Fatigue and Drowsiness during Medium-Distance Journeys. Entropy 2021, 23, 135. https://doi.org/10.3390/e23020135
Salvati L, d’Amore M, Fiorentino A, Pellegrino A, Sena P, Villecco F. On-Road Detection of Driver Fatigue and Drowsiness during Medium-Distance Journeys. Entropy. 2021; 23(2):135. https://doi.org/10.3390/e23020135
Chicago/Turabian StyleSalvati, Luca, Matteo d’Amore, Anita Fiorentino, Arcangelo Pellegrino, Pasquale Sena, and Francesco Villecco. 2021. "On-Road Detection of Driver Fatigue and Drowsiness during Medium-Distance Journeys" Entropy 23, no. 2: 135. https://doi.org/10.3390/e23020135