
Computer Vision Based Automatic Recognition of Pointer Instruments: Data Set Optimization and Reading



Abstract
:1. Introduction
- (1)
- Establishing a data set optimized by data fusion expansion and K-fold verification algorithm and getting it applied to industrial production, which optimized the data set quality and greatly reduced the workload of data set collection.
- (2)
- An intelligent meter reading system whose accuracy rate up to 98.65% is obtained by utilizing Faster-RCNN and Hough transform straight line detection. The evaluation of the algorithm performance shows that the method proposed in this paper is suitable for the extraction of pointer meters in the substation environment, and a feasible thought for object detection and reading of pointer meters is provided thereof.
2. Deep Learning-Based Object Detection
2.1. Object Detection Algorithm
2.2. Algorithm Selection
3. Preparation and Optimization of Data Set
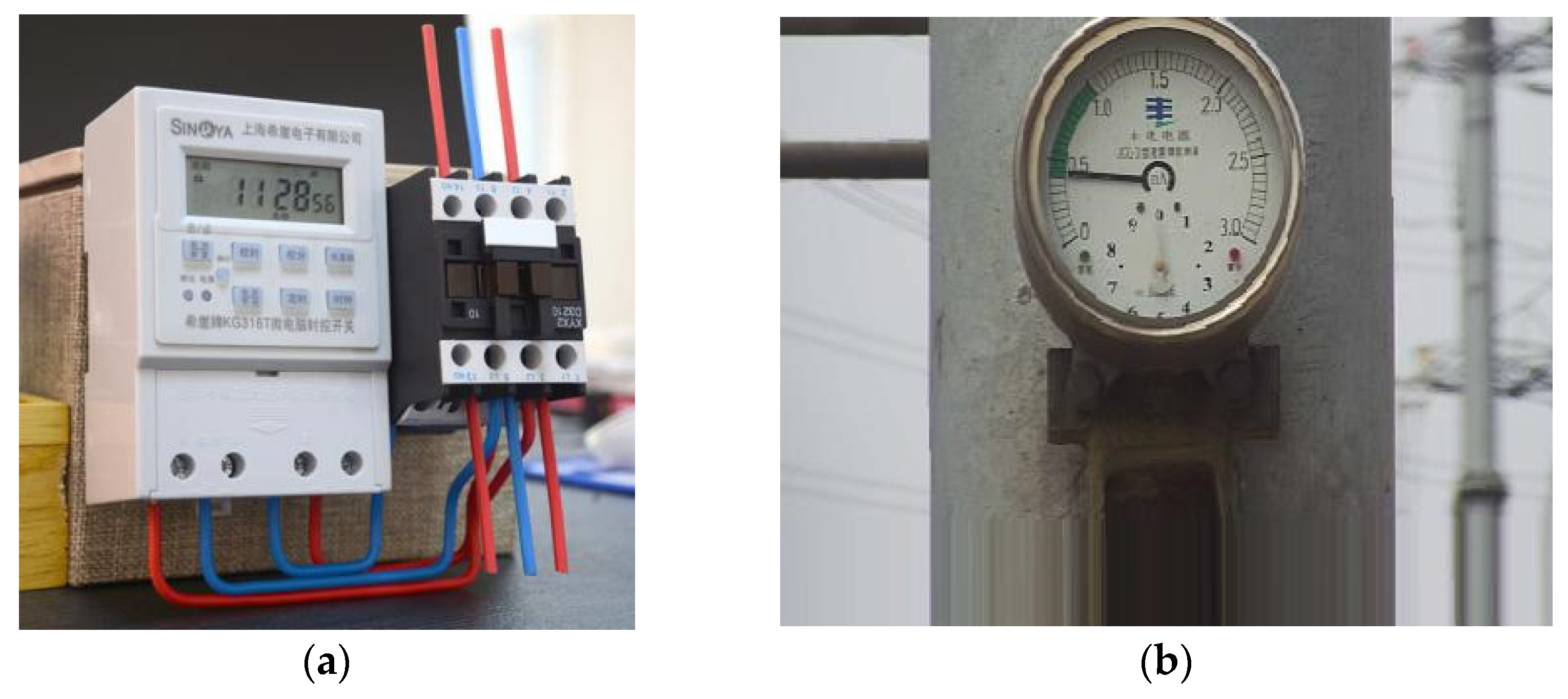
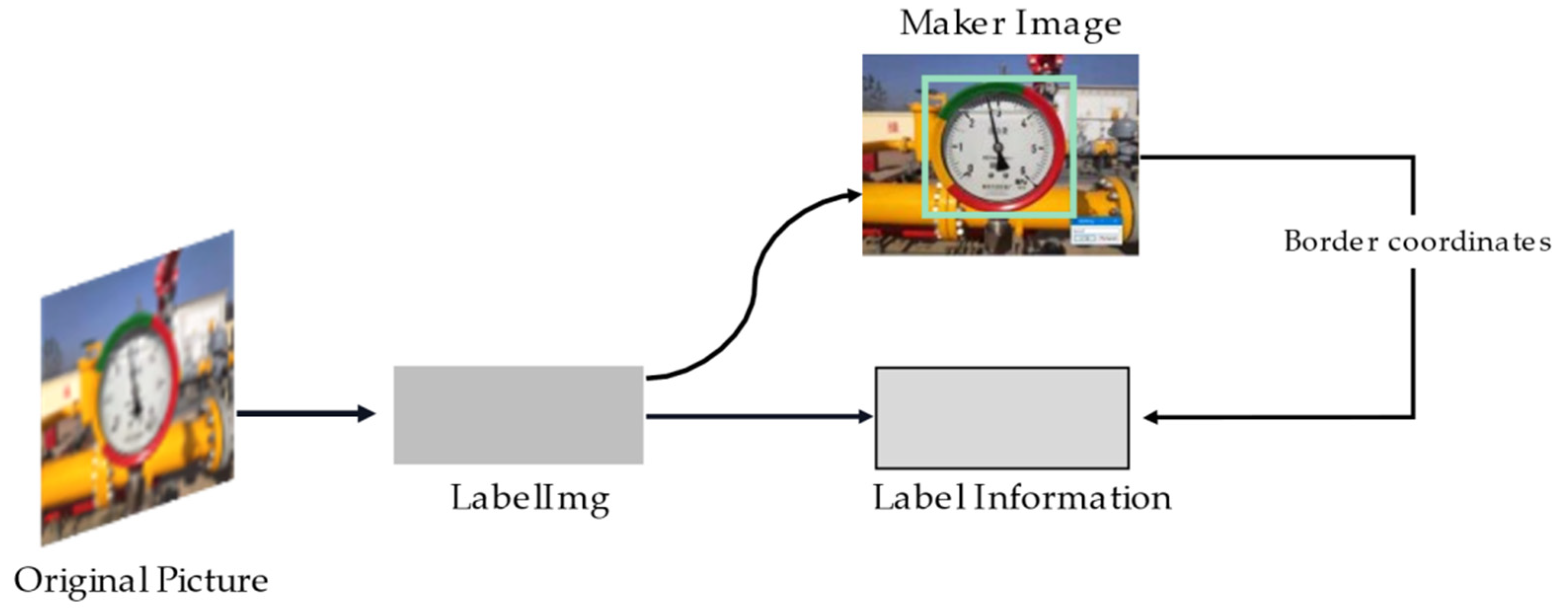
3.1. Data Set Processing
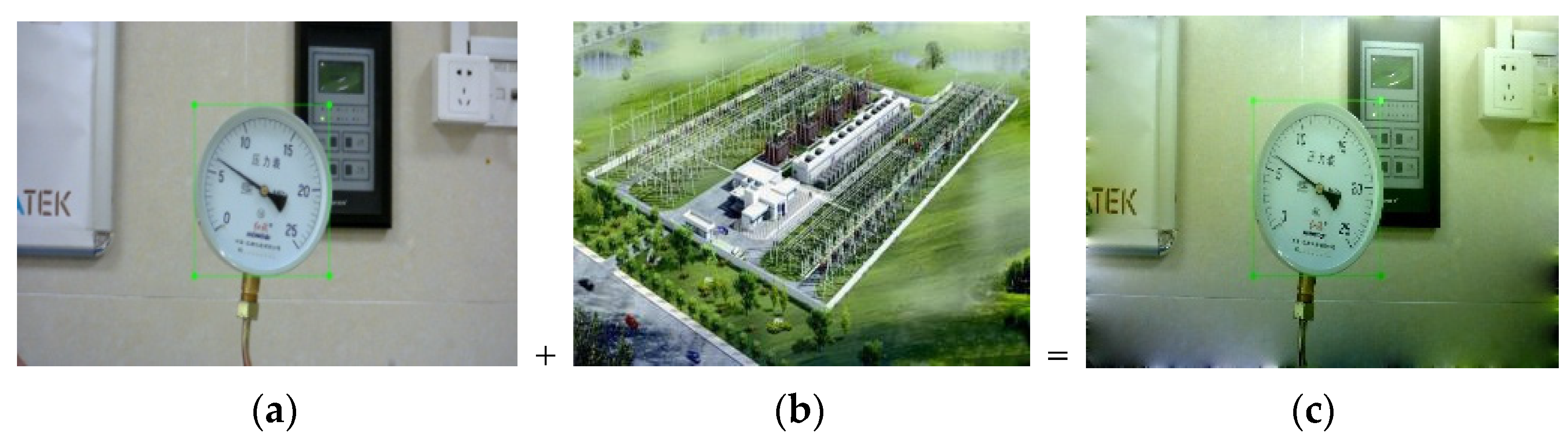
3.2. Data Set Expansion
Data Fusion
3.3. K-Fold Verification Algorithm
4. Object Detection Results and Experimental Process
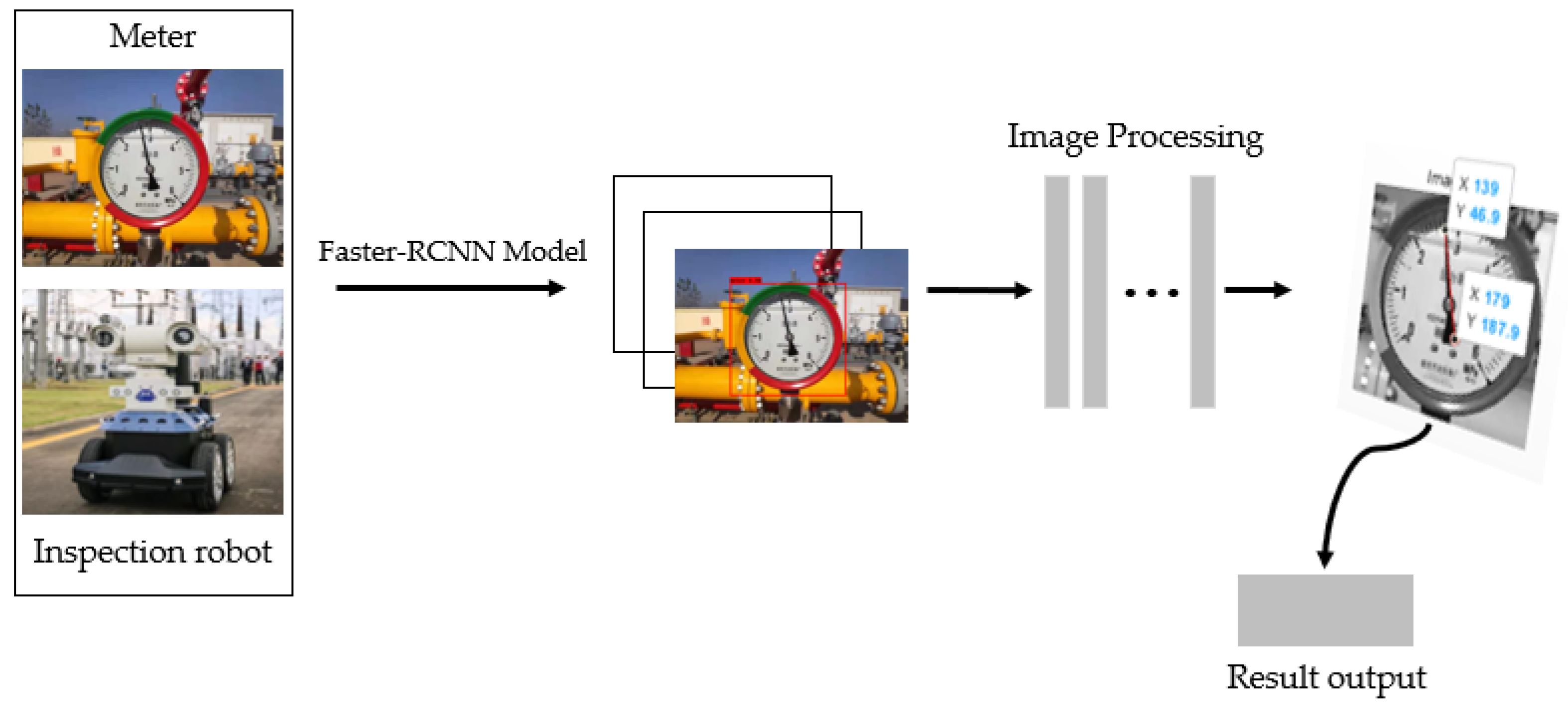
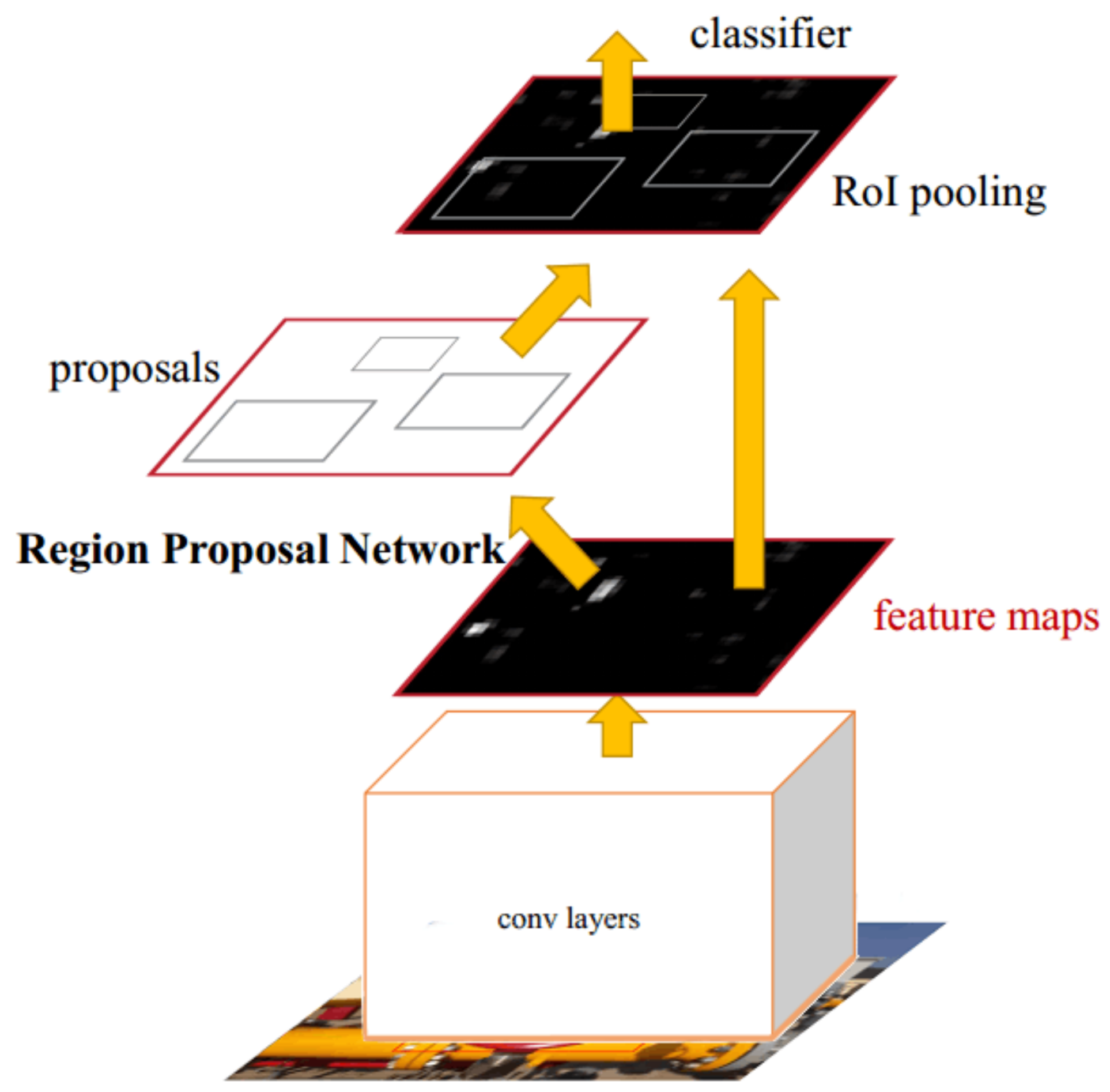
4.1. Faster-RCNN Based Dial Object Detection
4.2. The Core Feature Extracting Network Commonly Used by the Faster R-CNN Algorithm
4.2.1. ResNet
4.2.2. VGGNet
4.2.3. MobileNet
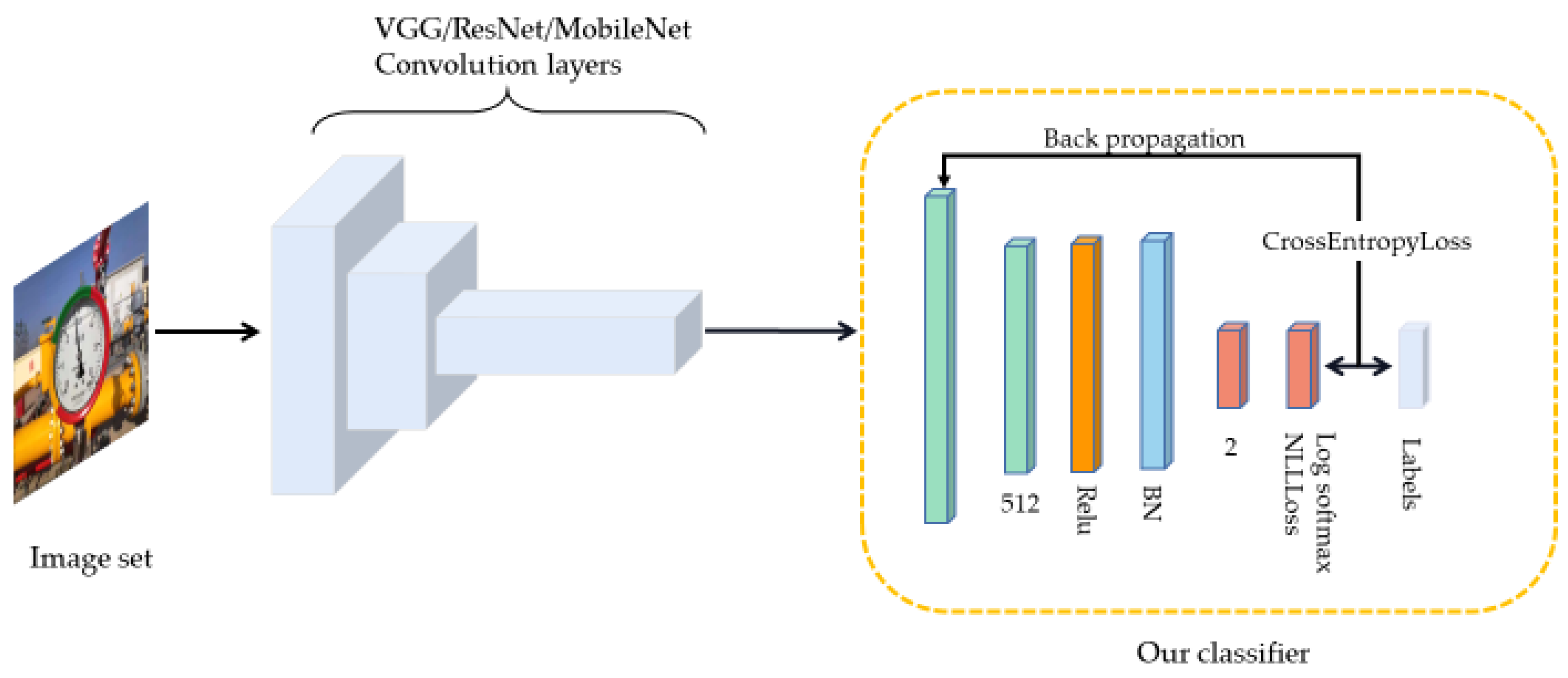
4.2.4. The Classifier Used in this Article
4.3. Faster-RCNN Algorithm Results Based on Different Frames
4.3.1. Experimental Environment
4.3.2. Evaluation Parameters
4.3.3. Experimental Results
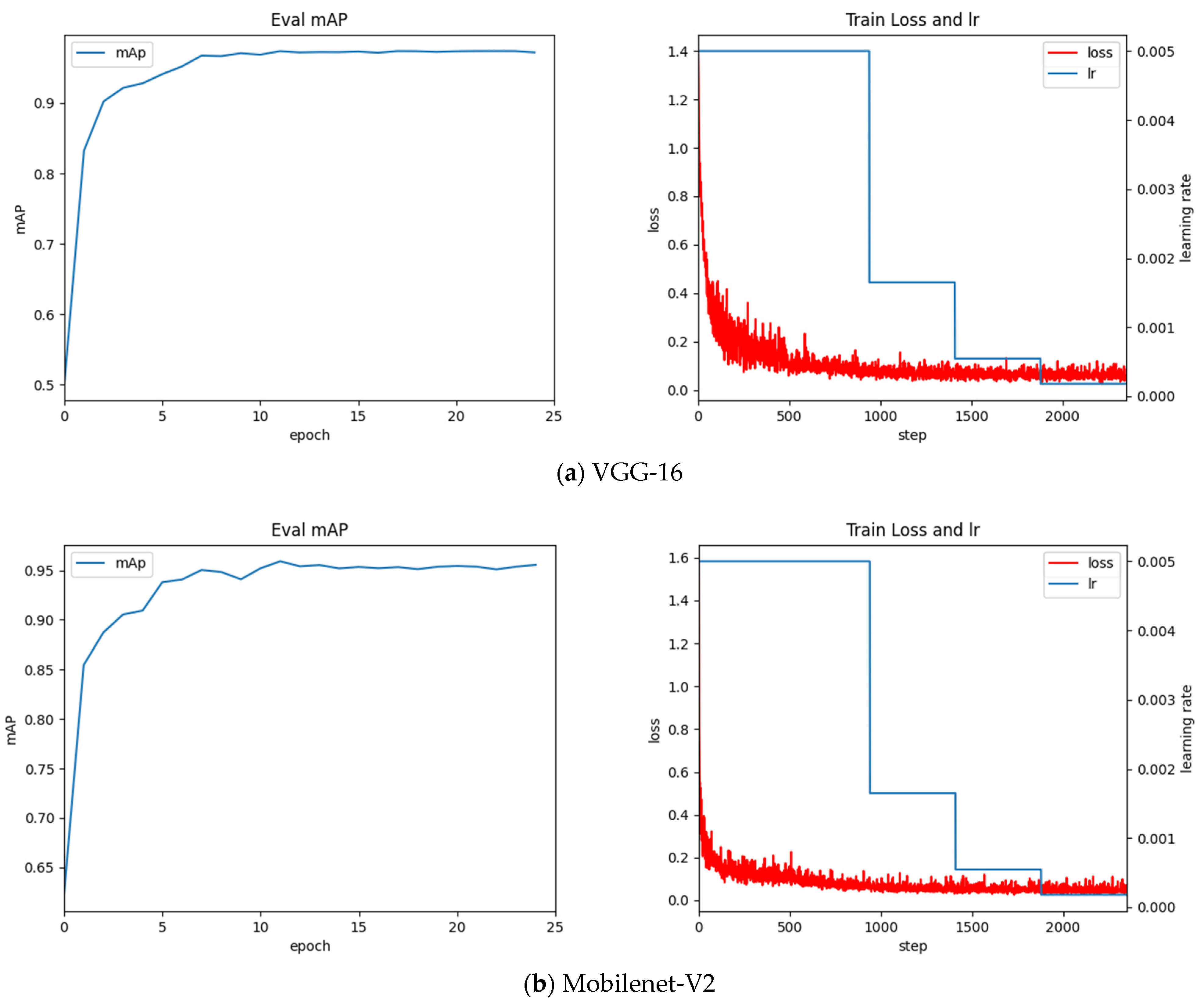
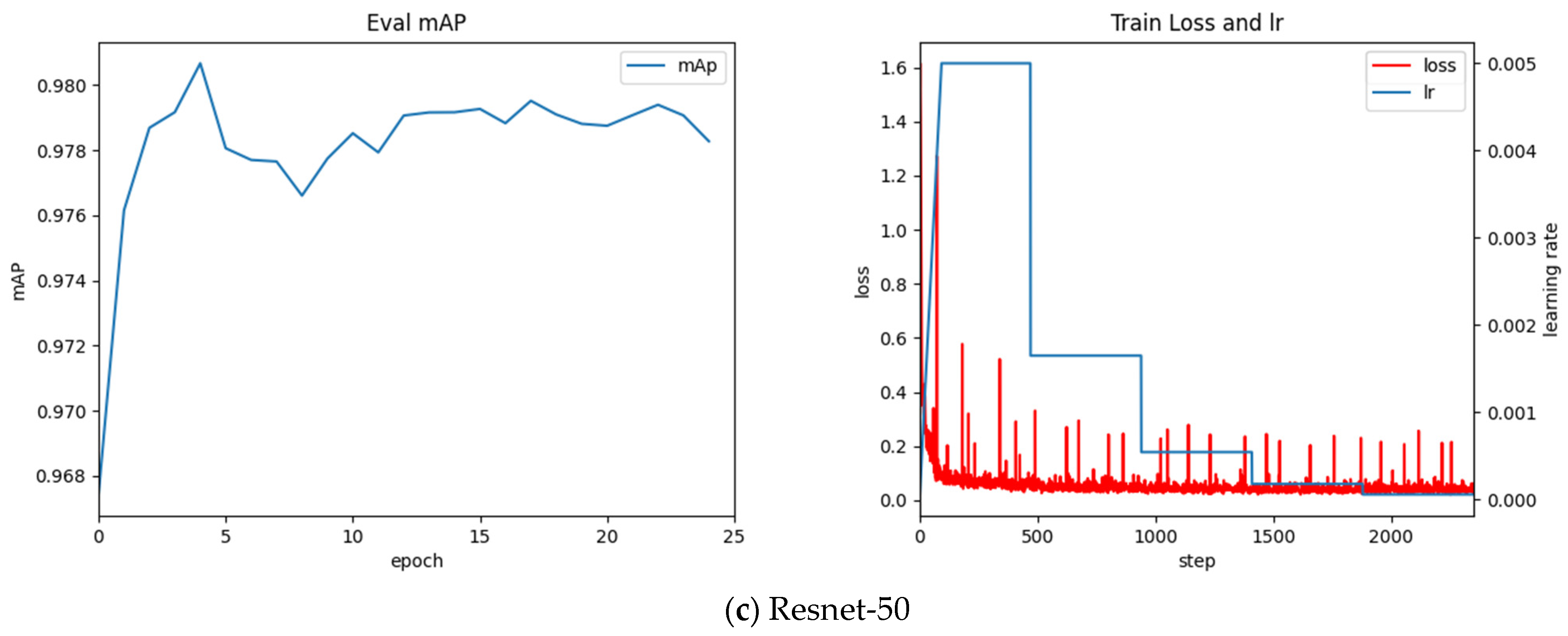
- Through the above experiment, observe the above training process diagram, the best mAP value for the classification network VGG-16 is 97.49%, the best mAP value for the Resnet-50 network is 98.20%, and the best mAP value for the MobileNet-V2 network is 95.46%.
- Resnet-50 performs poorly in global optimization. Its accuracy in the latter period is high, but the final convergence effect is not ideal. The oscillation still exists under the optimized classifier in the later stage, and the experiment still fluctuates greatly.
- MobileNet-V2’s early oscillation is more serious, but the later convergence effect is favorable. Given its low mAP value, it is discarded.
- With regard to the data of this sample, the VGG-16 network finally converges well, and its performance in the classifier is also ideal. Experiments under the optimized classifier show good accuracy and convergence. It is proved that the global optimization of VGG-16 is the best classification network, and its mAP value converges to 0.974.
5. Processing and Analysis
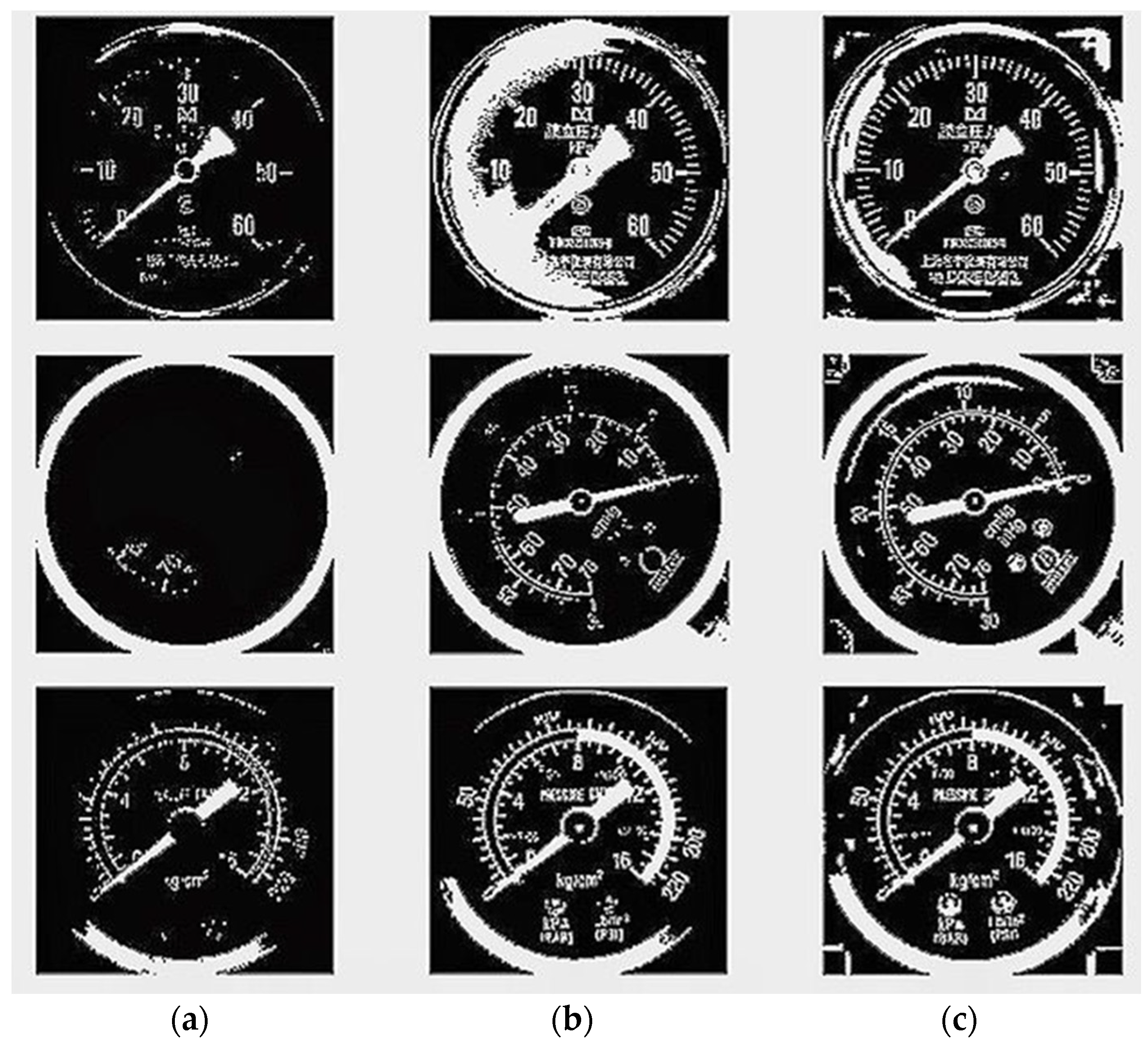
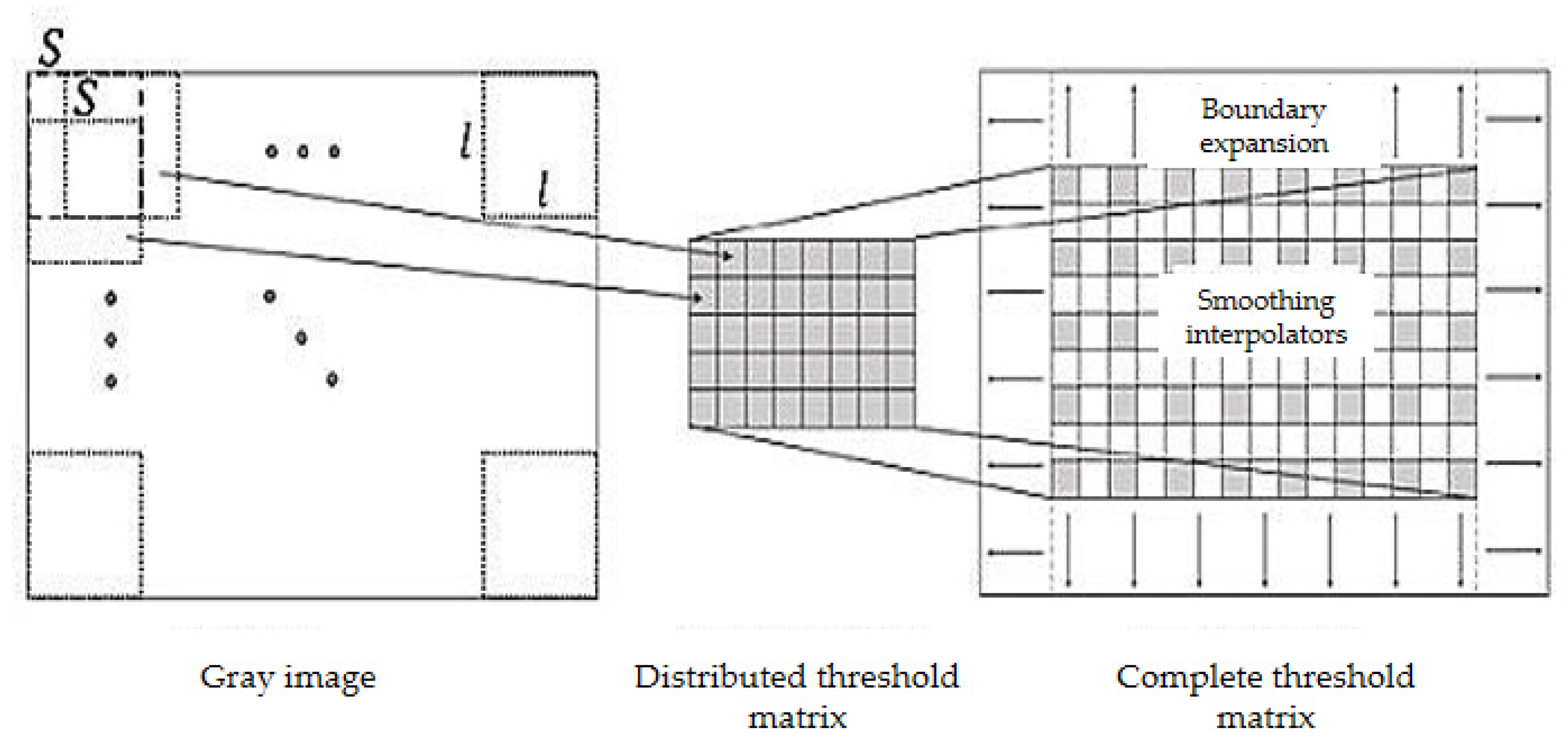
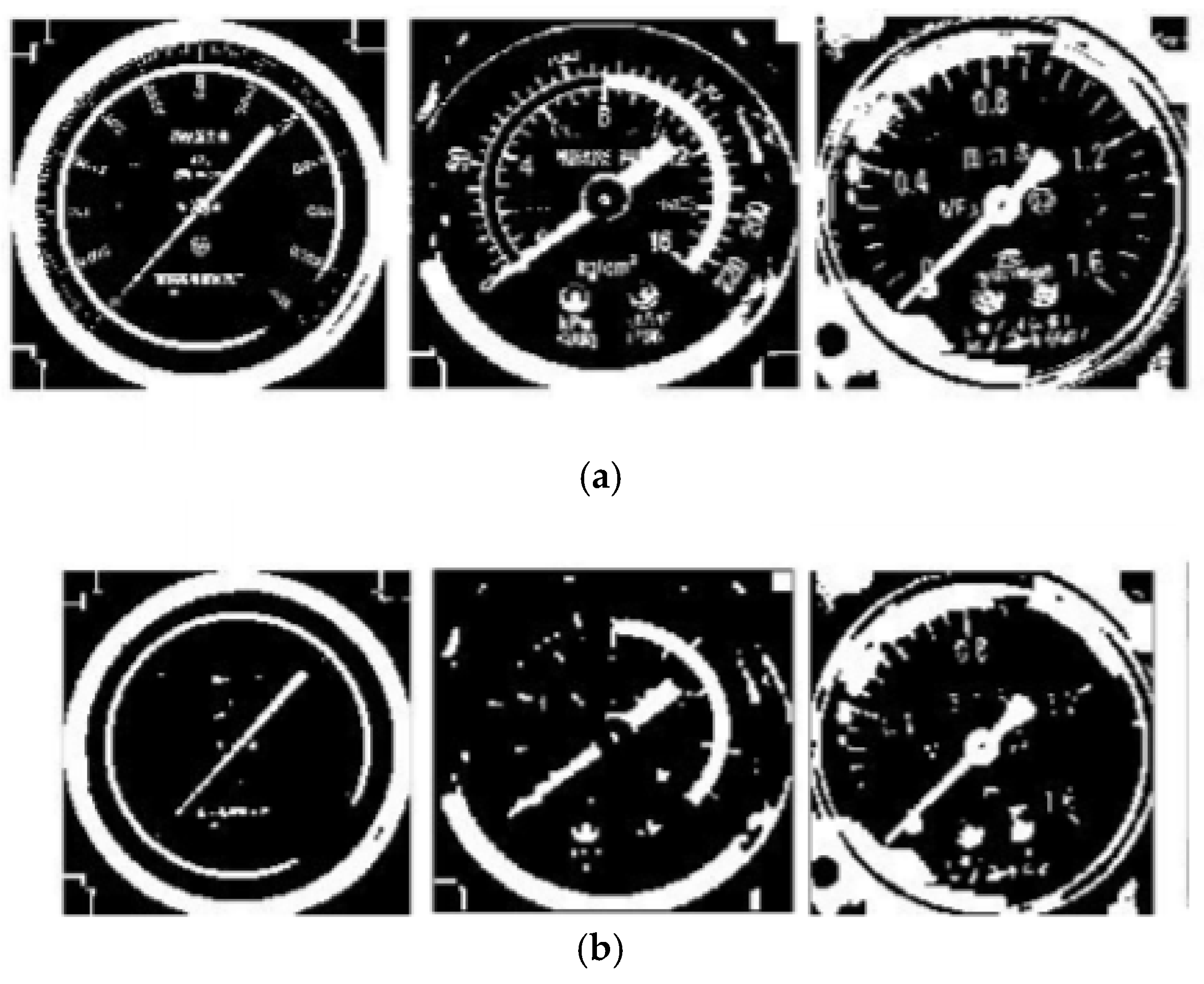
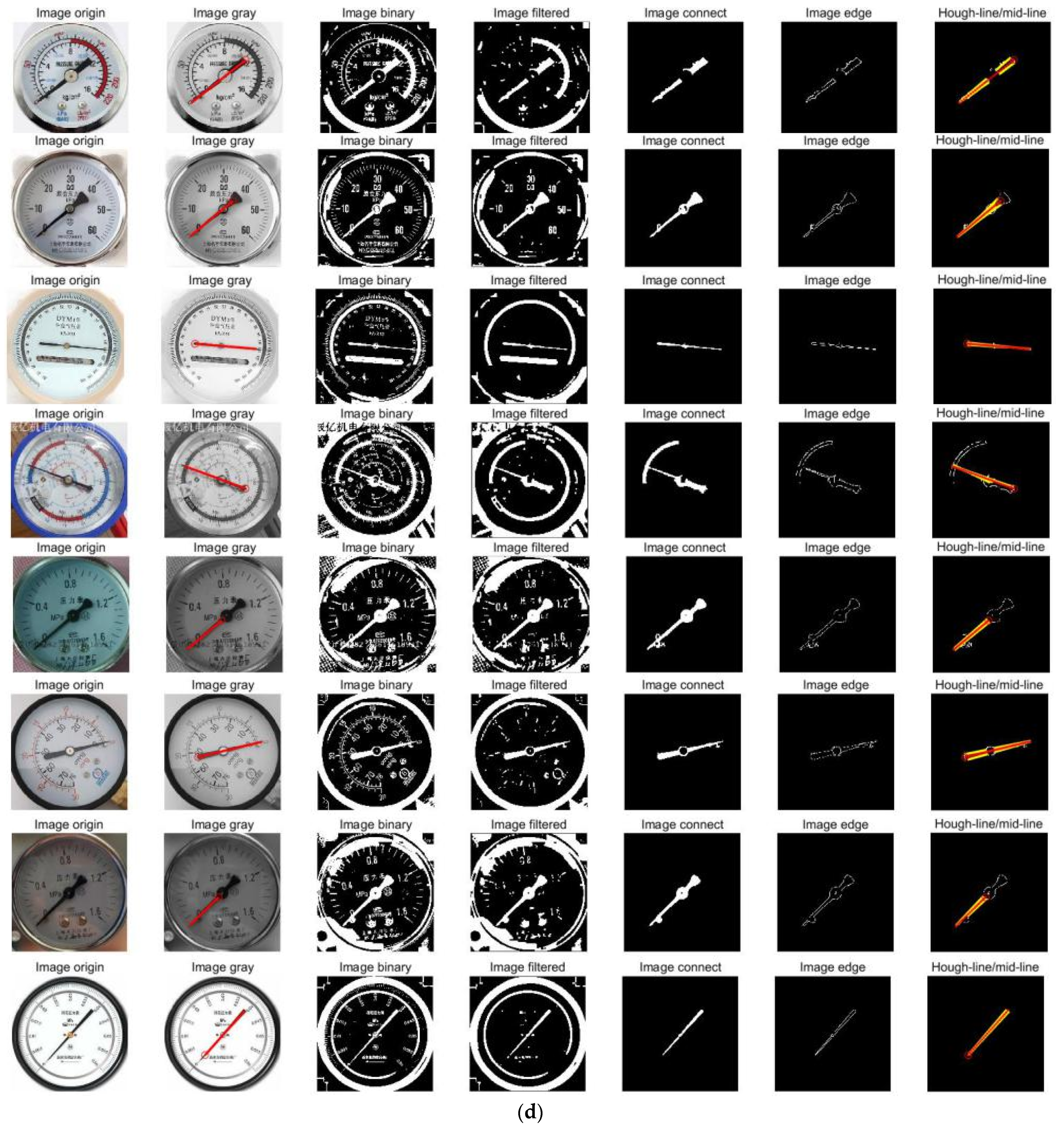
5.1. Image Preprocessing
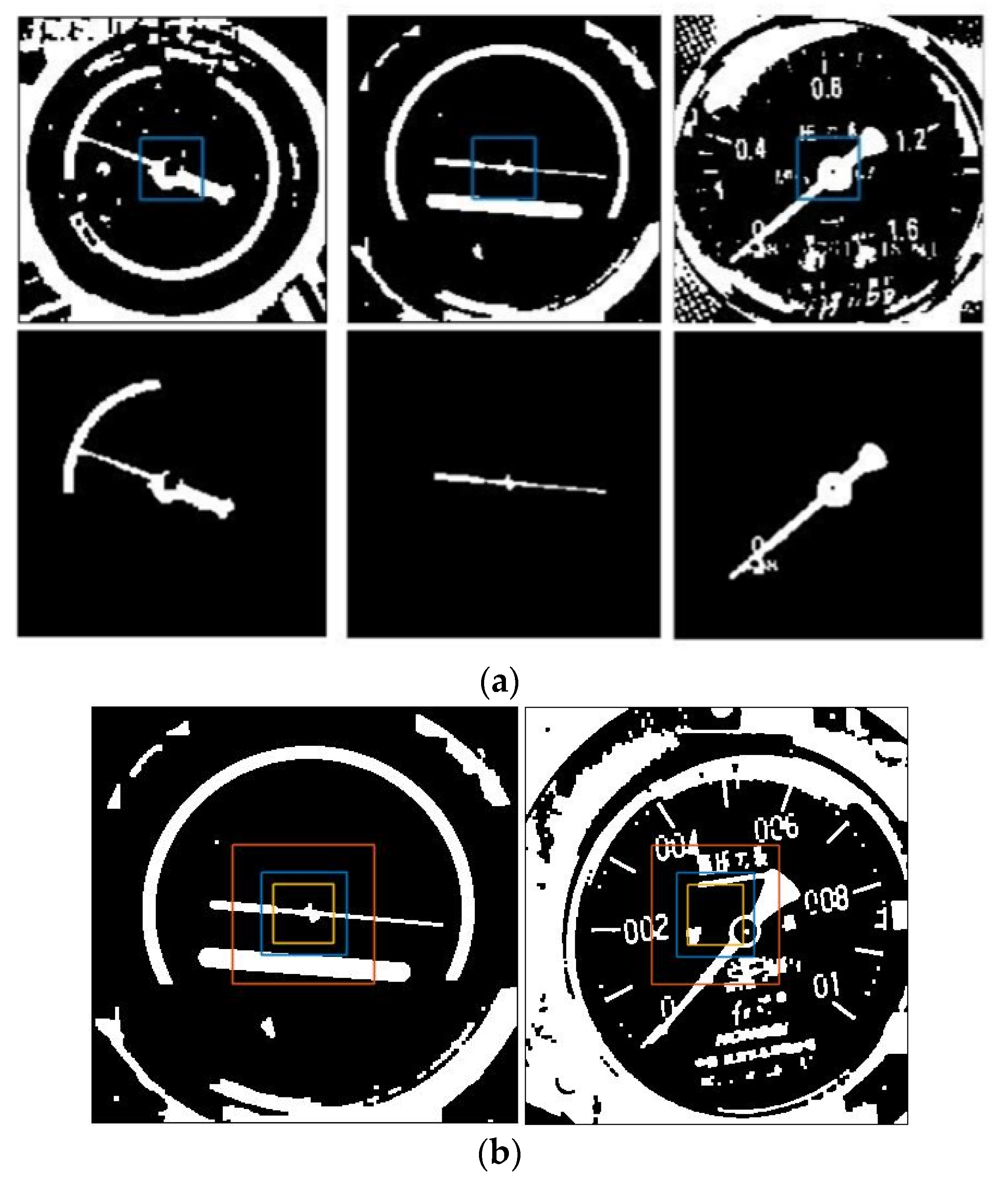
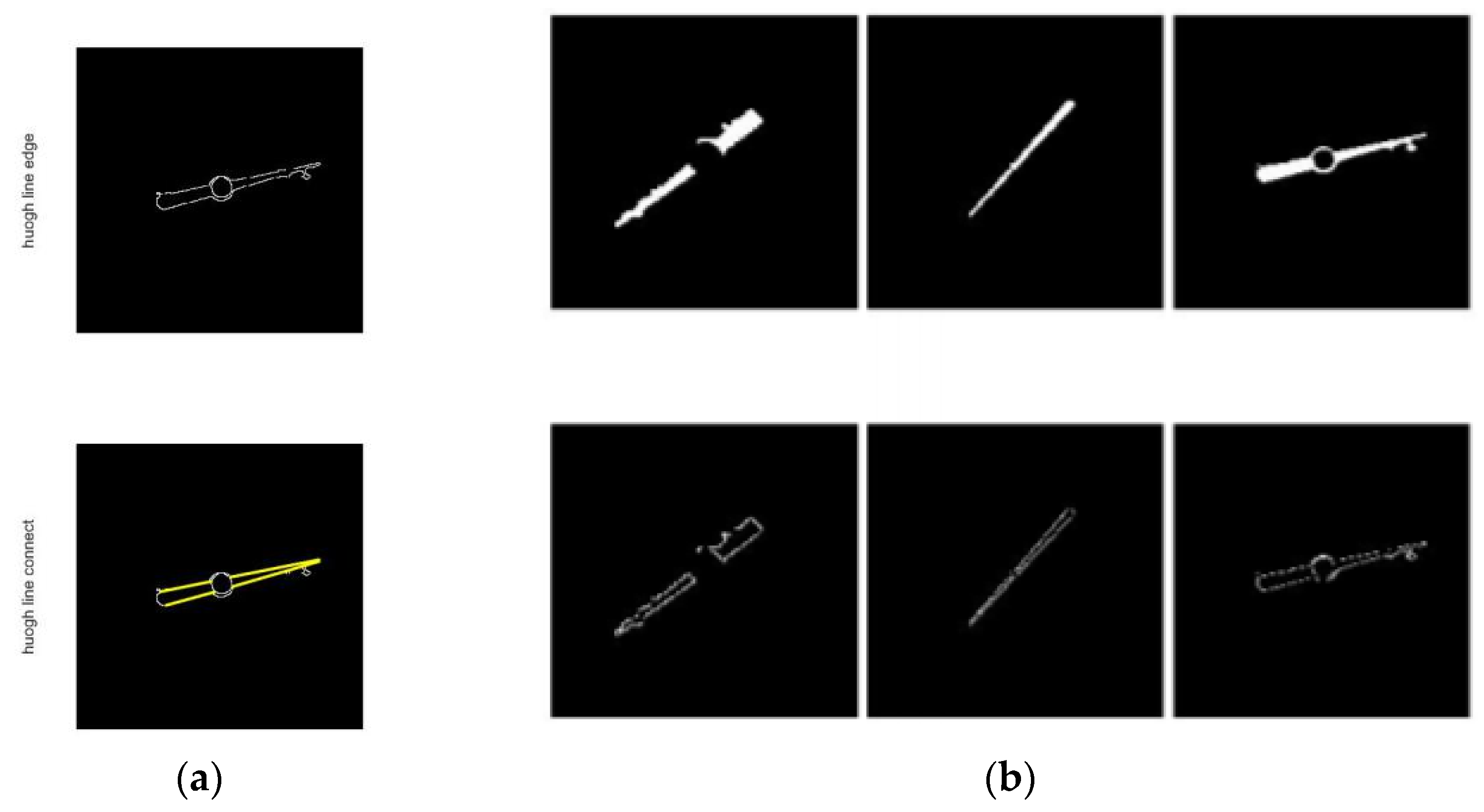
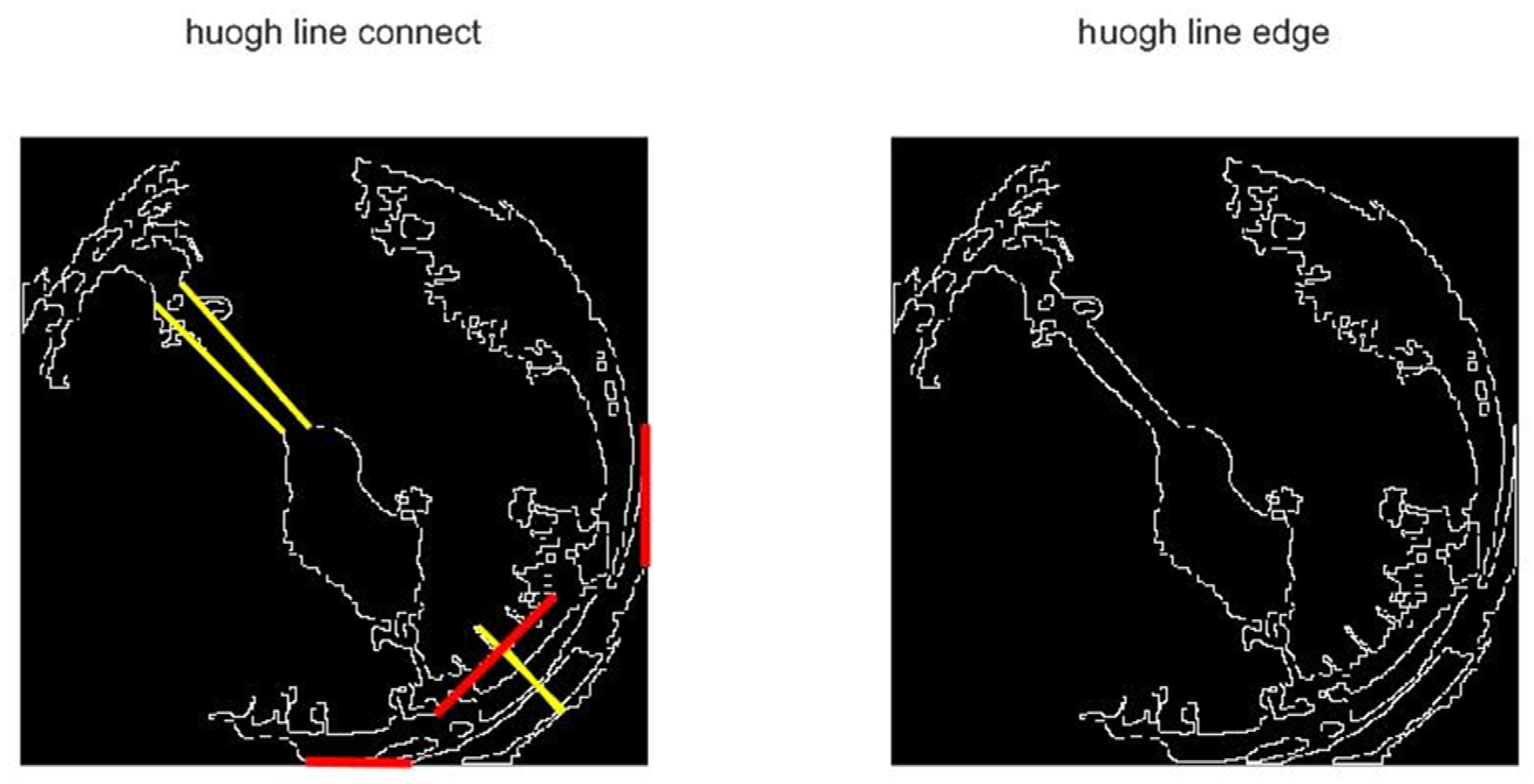
5.2. Pointer Extraction
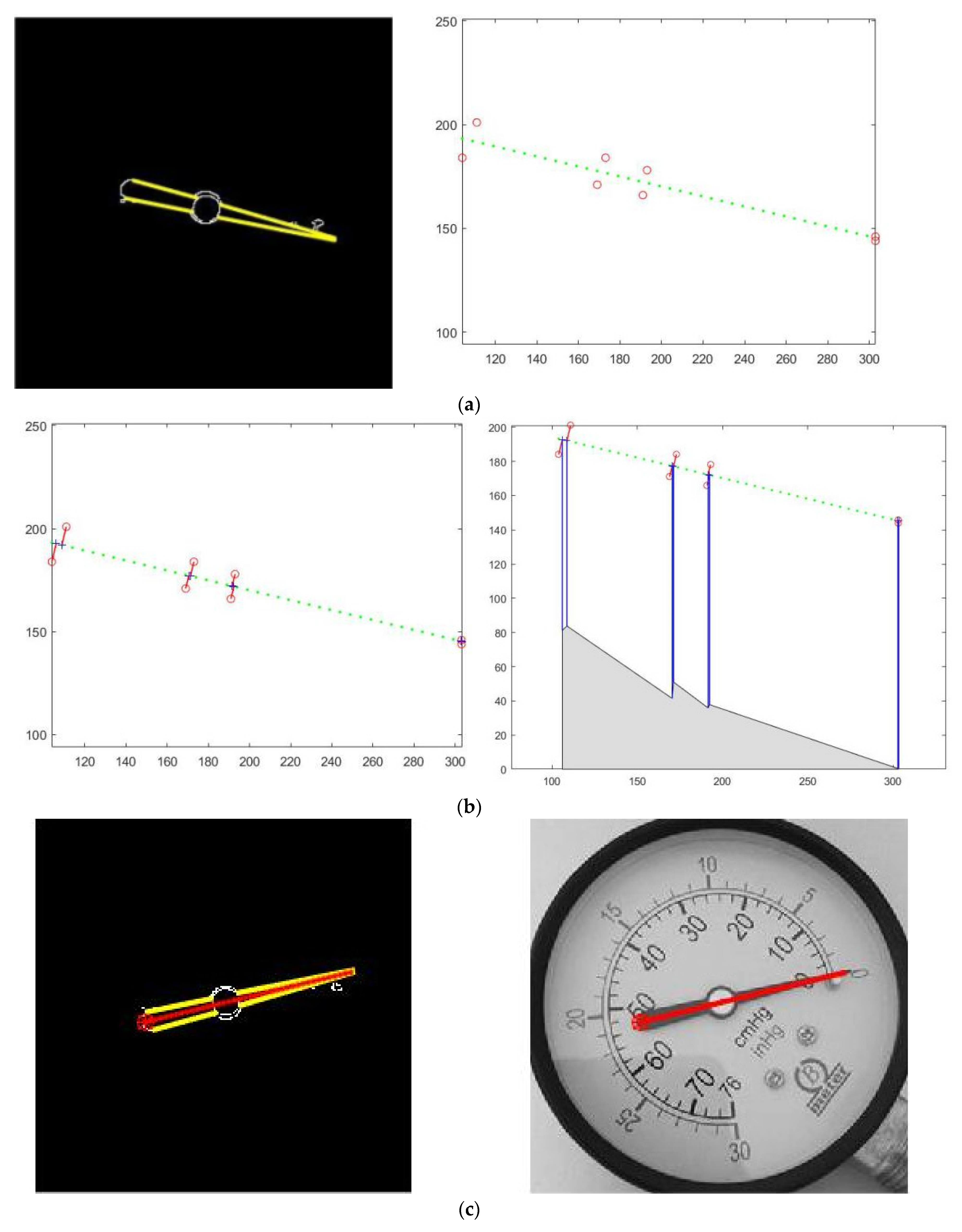
5.3. Image Reading
6. Summary
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Huo, F.; Wang, D.; Li, Z. Improved Recognition Method of Industrial Linear Pointer Meter. J. Jilin Univ. (Inf. Sci. Ed.) 2018, 36, 423–429. [Google Scholar]
- Wang, T.; Liu, S. Numerical recognition method of pointer instrument. J. Zhoukou Norm. Univ. 2019, 36, 57–61. [Google Scholar]
- Xu, P.; Zeng, W.; Shi, Y.; Zhang, Y. A Reading Recognition Algorithm of Pointer Type Oil—level Meter. Comput. Technol. Dev. 2018, 28, 189–193. [Google Scholar]
- Fang, H.; Ming, Z.; Zhou, Y. Meter Recognition Algorithm for Equipment Inspection Robot. Autom. Instrum. 2013, 28, 10–14. [Google Scholar]
- Li, W.; Wang, O.; Gang, Y. An automatic reading method for pointer meter. J. Nanjing Univ. (Nat. Sci.) 2019, 55, 117–124. [Google Scholar]
- Xing, H.; Du, Z.; Su, B. Detection and recognition method for pointer-type meter in transformer substation. Chin. J. Sci. Instrum. 2017, 38, 2813–2821. [Google Scholar]
- Duda, R.; Hart, P. Use of the hough transformation to detect lines and curves in pictures. Commun. ACM 1972, 15, 11–15. [Google Scholar] [CrossRef]
- Illingworth, J.; Kittler, J. A survey of the Hough transform. Comput. Vis. Graph. Image Process. 1988, 43, 280. [Google Scholar] [CrossRef]
- Ballard, D.H. Generalizing the hough transform to detect arbitrary shapes. Read. Comput. Vis. 1987, 714–725. [Google Scholar] [CrossRef] [Green Version]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Cho, M.; Kwak, S.; Schmid, C.; Ponce, J. Unsupervised Object Discovery and Localization in the Wild: Part-based Matching with Bottom-up Region Proposals. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015. [Google Scholar]
- Liu, Z.; Zhang, Y.; Chen, Y.; Fan, X.; Dong, C. Detection of Algorithmically Generated Domain Names Using the Recurrent Convolutional Neural Network with Spatial Pyramid Pooling. Entropy 2020, 22, 1058. [Google Scholar] [CrossRef]
- Wang, W.; Tian, B.; Liu, Y.; Liu, L.; Li, J. Study on the Electrical Devices Detection in UAV Images based on Region Based Convolutional Neural Networks. J. Geo-Inf. Sci. 2017, 19, 256–263. [Google Scholar]
- Girshick, R. Fast R-CNN. In Proceedings of the ICCV 2015: IEEE International Conference on Computer Vision, Santiago, Chile, 11–16 December 2015. [Google Scholar]
- Jia, W.; Tian, Y.; Luo, R.; Zhang, Z.; Lian, J.; Zheng, Y. Detection and segmentation of overlapped fruits based on optimized mask R-CNN application in apple harvesting robot. Comput. Electron. Agric. 2020, 172, 105380. [Google Scholar] [CrossRef]
- Joshi, R.C.; Yadav, S.; Dutta, M.K.; Travieso-Gonzalez, C.M. Efficient Multi-Object Detection and Smart Navigation Using Artificial Intelligence for Visually Impaired People. Entropy 2020, 22, 941. [Google Scholar] [CrossRef] [PubMed]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. SSD: Single shot multibox detector. In Proceedings of the ECCV 2016: European Conference on Computer Vision, Amsterdam, The Netherlands, 7–12 June 2016. [Google Scholar]
- Pérez, P.; Gangnet, M.; Blake, A. Poisson image editing. In ACM SIGGRAPH 2003 Papers; ACM: San Diego, CA, USA, 2003; Volume 22, pp. 313–318. [Google Scholar]
- Sun, H.; Li, Z.; Jiang, Y.; Zhao, H.; Gu, C.; Shi, J.; Sheng, G.; Jiang, X. Approach of Data Augmentation Based on Context Modeling of Foreign Object Detection in Power Inspection. Power Syst. Technol. 2020. [Google Scholar] [CrossRef]
- He, S.; Yang, B. Local Structural and Visual Saliency Based Infrared and Visible Image Fusion with Poisson Reconstruction. J. Univ. South China (Sci. Technol.) 2020, 34, 62–70+76. [Google Scholar]
- Shi, J.; Li, Z.; Gu, C.; Sheng, G.; Jiang, X. Research on Foreign Matter Monitoring of Power Grid With Faster R-CNN Based on Sample Expansion. Power Syst. Technol. 2020, 44, 44–51. [Google Scholar]
- Shen, Z. Research of Image Compositing Technology Based on Deep Learning; East China Normal University: Shanghai, China, 2018. [Google Scholar]
- Bengio, Y.; Grandvalet, Y. No Unbiased Estimator of the Variance of K-Fold Cross-Validation. J. Mach. Learn. Res. 2004, 5, 1089–1105. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the CVPR 2016: IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 26 June–1 July 2016. [Google Scholar]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet classification with deep convolutional neural networks. In Proceedings of the NIPS 2012: The Conference and Workshop on Neural Information Processing Systems, Lake Tahoe, CA, USA, 3–8 December 2012. [Google Scholar]
- Howard, A.G.; Zhu, M.; Chen, B.; Kalenichenko, D.; Wang, W.; Weyand, T.; Andreetto, M.; Adam, H. MobileNets: Efficient Convolutional Neural Networks for Mobile Vision Applications. arXiv 2017, arXiv:1704.04861. [Google Scholar]
- Zhang, Z.; Sabuncu, M.R. Generalized Cross Entropy Loss for Training Deep Neural Networks with Noisy Labels. arXiv 2018, arXiv:1805.07836. [Google Scholar]
- Yao, H.; Zhu, D.-L.; Jiang, B.; Yu, P. Negative log likelihood ratio loss for deep neural network classification. Adv. Intell. Syst. Comput. 2019, 1069, 276–282. [Google Scholar]
- Wei, J.; Gao, Z. Prediction Method of Spacecraft On-orbit Environment Based on OTSU Binarization. Comput. Meas. Control 2020, 28, 75–79. [Google Scholar]
- Wang, Y. Workpiece surface image segmentation based on ontrast enhancement and maximum entropy. Foreign Electron. Meas. Technol. 2019, 38, 37–40. [Google Scholar]
- Gao, H.; Wang, W. New connected component labeling algorithm for binary image. J. Comput. Appl. 2007, 2776–2777. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | R-CNN | Fast-RCNN | Faster-RCNN | YOLO | SSD |
|---|---|---|---|---|---|
| mAP (%) | 63.20 | 70.21 | 90.27 | 81.32 | 79.20 |
| Time (s) | 22.1 | 4.1 | 0.69 | 0.48 | 0.57 |
| Target Detection | Epoch1 (%) | Epoch2 (%) | Epoch3 (%) | Epoch4 (%) | Epoch5 (%) |
|---|---|---|---|---|---|
| 95.45 | 95.35 | 95.21 | 95.61 | 95.52 |
| Target Detection | ||
|---|---|---|
| 92.67 | 95.43 |
| VGG | ResNet | MobileNet | ||
|---|---|---|---|---|
| 16-layer | 50-layer | 16-layer | ||
| Learning Rate | Batch Size | Maximum Number of Epochs | Iterations Per Epoch | Momentum | Decay | |
|---|---|---|---|---|---|---|
| Faster-RCNN | 0.005 | 4 | 25 | 50 | 0.9 | 0.0005 |
| Number | Human Vision | Method in [3] | Relative Error (%) | Method in [4] | Relative Error (%) | Our Method | Relative Error (%) |
|---|---|---|---|---|---|---|---|
| 1 | 41.121 | 39.140 | 1.651 | 39.564 | 1.297 | 40.481 | 0.533 |
| 2 | 38.725 | 33.548 | 4.314 | 34.176 | 3.790 | 35.952 | 2.310 |
| 3 | 30.710 | 35.954 | 4.370 | 25.354 | 4.463 | 26.720 | 3.325 |
| 4 | 47.601 | 42.364 | 4.364 | 42.689 | 4.093 | 43.894 | 3.089 |
| 5 | 39.399 | 35.021 | 3.648 | 35.637 | 3.135 | 36.746 | 2.211 |
| 6 | 43.054 | 40.364 | 2.242 | 40.854 | 1.833 | 41.946 | 0.923 |
| 7 | 36.732 | 37.962 | 1.025 | 35.086 | 1.372 | 36.333 | 0.332 |
| 8 | 34.137 | 31.541 | 2.163 | 31.877 | 1.883 | 32.091 | 1.705 |
| 9 | 57.380 | 55.100 | 1.900 | 59.324 | 1.620 | 58.273 | 0.744 |
| 10 | 46.332 | 44.326 | 1.672 | 44.638 | 1.411 | 45.624 | 0.590 |
| 11 | 54.462 | 53.920 | 0.452 | 53.214 | 1.040 | 54.237 | 0.187 |
| 12 | 86.906 | 89.785 | 2.399 | 90.102 | 2.663 | 84.785 | 1.762 |
| 13 | 41.987 | 39.542 | 2.038 | 39.563 | 2.020 | 40.069 | 1.592 |
| 14 | 33.205 | 35.248 | 1.702 | 36.420 | 2.679 | 34.350 | 0.954 |
| 15 | 36.888 | 35.147 | 1.451 | 34.695 | 1.827 | 37.699 | 0.682 |
| 16 | 74.691 | 73.210 | 1.234 | 72.913 | 1.481 | 73.645 | 0.871 |
| 17 | 40.342 | 35.124 | 4.348 | 36.451 | 3.242 | 37.250 | 2.576 |
| 18 | 58.933 | 58.322 | 0.509 | 58.360 | 0.477 | 58.485 | 0.373 |
| 19 | 40.986 | 36.853 | 3.444 | 37.021 | 3.304 | 38.279 | 2.255 |
| 20 | 41.248 | 40.985 | 0.219 | 40.830 | 0.348 | 41.164 | 0.070 |
| Mean | / | / | 2.257 | / | 2.199 | 44.905 | 1.354 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, L.; Wang, P.; Wu, L.; Xu, L.; Huang, P.; Kang, Z. Computer Vision Based Automatic Recognition of Pointer Instruments: Data Set Optimization and Reading. Entropy 2021, 23, 272. https://doi.org/10.3390/e23030272
Wang L, Wang P, Wu L, Xu L, Huang P, Kang Z. Computer Vision Based Automatic Recognition of Pointer Instruments: Data Set Optimization and Reading. Entropy. 2021; 23(3):272. https://doi.org/10.3390/e23030272
Chicago/Turabian StyleWang, Lu, Peng Wang, Linhai Wu, Lijia Xu, Peng Huang, and Zhiliang Kang. 2021. "Computer Vision Based Automatic Recognition of Pointer Instruments: Data Set Optimization and Reading" Entropy 23, no. 3: 272. https://doi.org/10.3390/e23030272
APA StyleWang, L., Wang, P., Wu, L., Xu, L., Huang, P., & Kang, Z. (2021). Computer Vision Based Automatic Recognition of Pointer Instruments: Data Set Optimization and Reading. Entropy, 23(3), 272. https://doi.org/10.3390/e23030272