1. Introduction
A classical random walk on a finite graph explores the system completely. In a search process, a particle starts on some node of a graph and then searches for a target on another node. For classical walks on such structures, the arrival probability
, the probability that the particle starting on one node is eventually detected at some other specified location, is unity. In that limited sense, a classical random walk search on a finite graph, is exhaustive, though time-wise it is inefficient. The exception with
is obvious. If the graph is decomposable into several non-connected parts, the dynamics is not ergodic, and then exploration of at least part of the space is prohibited. Thus, the related recurrence problem becomes an issue only for an infinite system. For example, a classical random walk on an infinite lattice in dimension larger than two is non-recurrent [
1,
2,
3].
A very different behavior is found for quantum walkers [
4,
5,
6,
7] on finite graphs that start localized on a node of the graph. The concept of quantum arrival is not well-defined, and instead we discuss the first detection; see Sec. II. Moreover, constructive interference may speed up search processes dramatically, under certain conditions [
8]. However, destructive interference may divide the Hilbert space into two components called dark and bright, and this yields an inefficient search and an effect superficially similar to classical non-ergodicity,
. More specifically, an observer performs repeated strong measurements, on a node other than the starting node, in an attempt to detect the particle [
8,
9,
10,
11,
12,
13,
14,
15,
16,
17,
18,
19,
20,
21,
22]. In the time intervals between the measurements the dynamics is unitary. The rate of measurement attempts is
, where
is a parameter of choice (see details below). Due to destructive interference, there might exist certain initial states
whose amplitude vanishes at the detected node at all times and this renders them non-detectable. Such initial conditions are called dark states and they are widely encountered [
23]. In this case, the mean hitting time, i.e., the mean time for detection, is infinite [
10]. This occurs even for simple models like quantum walks on a hyper-cube [
8] or a ring [
17]. More precisely, to get non-classical behavior for
, the system has to have some symmetry property [
10,
24] (though in other cases, symmetry is responsible for the speedup of the quantum search). Generic initial states
, are linear combinations of dark and bright states, the latter defined as states that are detected with probability one. It follows that a system starting in state
has a probability to be detected that lies somewhere between zero and unity. The challenge is to find
.
A formal solution for the detection probability was found in [
8,
24] and obtained explicitly for a few examples [
25]. Since
is non-trivial, as compared with its classical counterpart, we will find its bound. This is derived via an uncertainty relation [
24],
Here
is the deviation of the total detection probability from the initial probability of detection,
is the variance of the energy in the detected state |
d〉, and on the right hand side of the inequality we have the commutator of
H and the measurement projector
. Generally, the uncertainty principle [
26], describes the deviation of the quantum world from classical Newtonian mechanics. Our goal is very different. We present an approach that shows how quantum walks, depart from the corresponding classical walks. The relation does not depend on the sampling time
, and in fact is valid for a large class of measurement protocols. Recently, a time-energy uncertainty-like relation, was found in [
27], with a focus on the time to detect a particle returning to its origin.
Note that the uncertainty principle discussed here, an exact formal solution to the problem, and an upper bound based on symmetry, were presented recently in a short communication [
24]. Here, our goal is to provide a more detailed account of the problem. Below, we will show how to improve the lower bound obtained from the uncertainty principle. We also extend our previous study providing an upper bound based on an uncertainty principle, Equation (
18) below. A key element of this work is to explore the basic ingredients of the uncertainty principle, for systems subject to repeated measurements. For large systems and depending on the initial condition, the lower bound in the above mentioned uncertainty relation, can be far from the exact result. However, improved bounds, which are based on related principles, can be very accurate. For example, we found a lower and upper bound on the detection problem of a hyper-cube in
d dimensions, these coincide tightly with the exact result [
24]. Thus, the focus here is on an elementary uncertainty principle for an evolution interspersed with measurements, with a form that relies on a commutation relation, in the spirit of the standard approach.
2. Model and Notation
We consider quantum dynamics on a finite graph. The evolution free-of-measurement is described by a time independent Hamiltonian
H and the corresponding unitary propagator. Examples include a single particle on a graph, where
H is a tight-binding Hamiltonian, e.g., the dynamics of a particle on a ring with hops to nearest neighbours. The theory is valid in generality, e.g., by identifying the graph with a Fock space, one can describe the dynamics of a many-body system, see an example in Ref. [
27]. Initially, the particle is in state
, which could be a state localized on a node of the graph.
An extensively studied measurement protocol, exploits stroboscopic measurements at times
in an attempt to detect the particle in state
(see [
28] for the case of a general distribution of times between measurements). The detected state
can be a node of the graph or an energy eigenstate of
H, etc. Specifically, the measurement, if successful, projects the wave packet onto state
; otherwise this state is projected out and the wave function renormalised (see below). Between the measurement attempts the evolution is unitary and described by
and here
. The outcome of a measurement is binary: either a failure to detect (no) or success (yes). Thus, the string of measurements yields a sequence no, no, and in the n-th attempt a yes, though the final success is not guaranteed. Once we detect the particle, we are done, and we say that
is the time it took to detect the particle in state
. Fixing
H and
and repeating this measurement process does not mean that the particle is always detected. The question addressed here is what is the probability that the particle is detected at all, in principle after an infinite number of measurement attempts. This is the total detection probability
.
This model is the quantum version of the first passage time problem [
2,
3]. However, the measurements back react and modify the dynamics. Specifically, each individual measurement is described with the collapse postulate. Namely, if the system’s wave function is
at the moment of the detection attempt, the amplitude of finding the particle at
is
. As mentioned, if the particle is detected we are done. If not, the amplitude of the quantum state on the detector is set to zero, the wave function renormalised, and the evolution free of measurements continues until the next measurement, etc. Mathematically, the failed detection transforms
, i.e., the wave function just before measurement, to
where
N is the normalization factor, and
is the measurement projector.
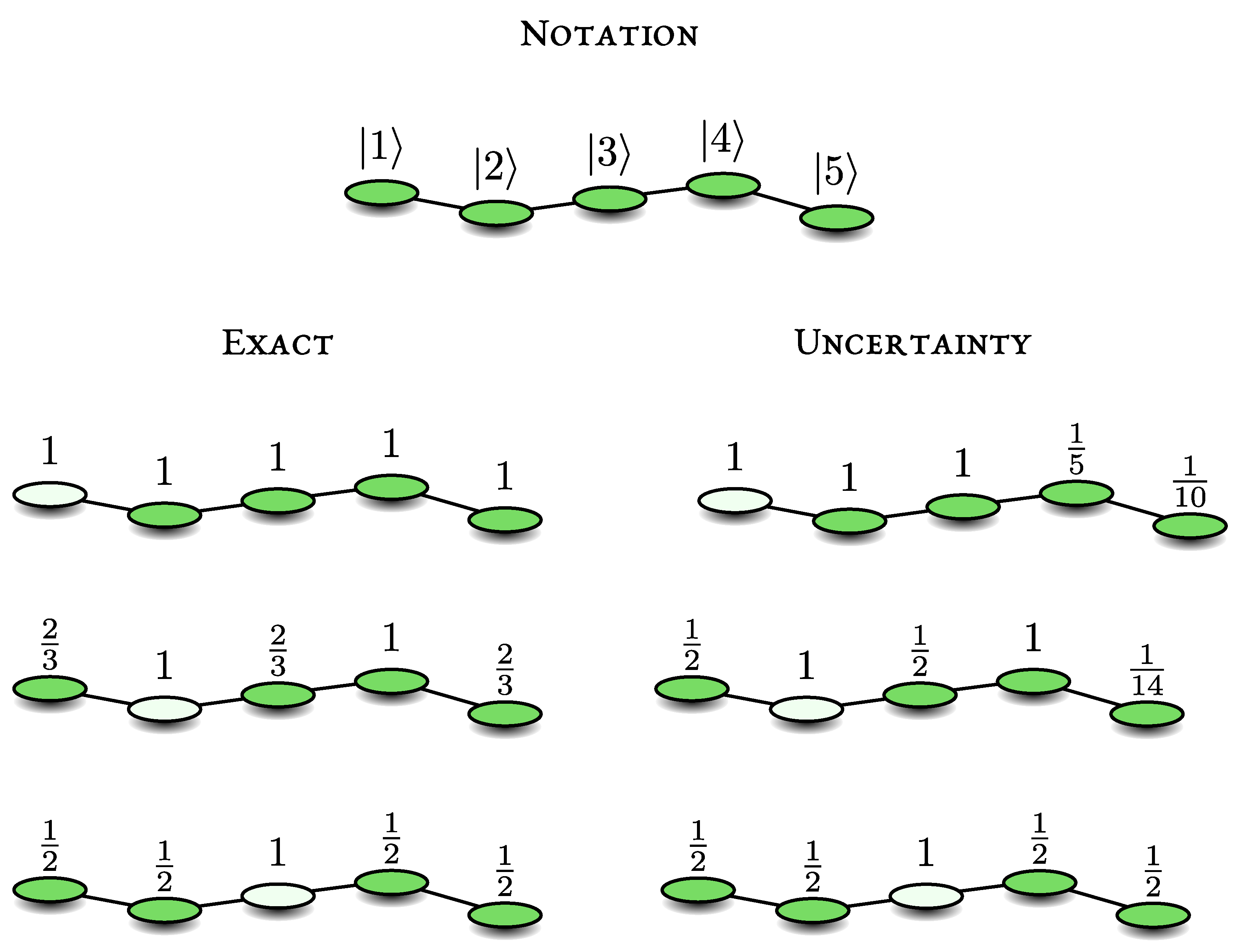
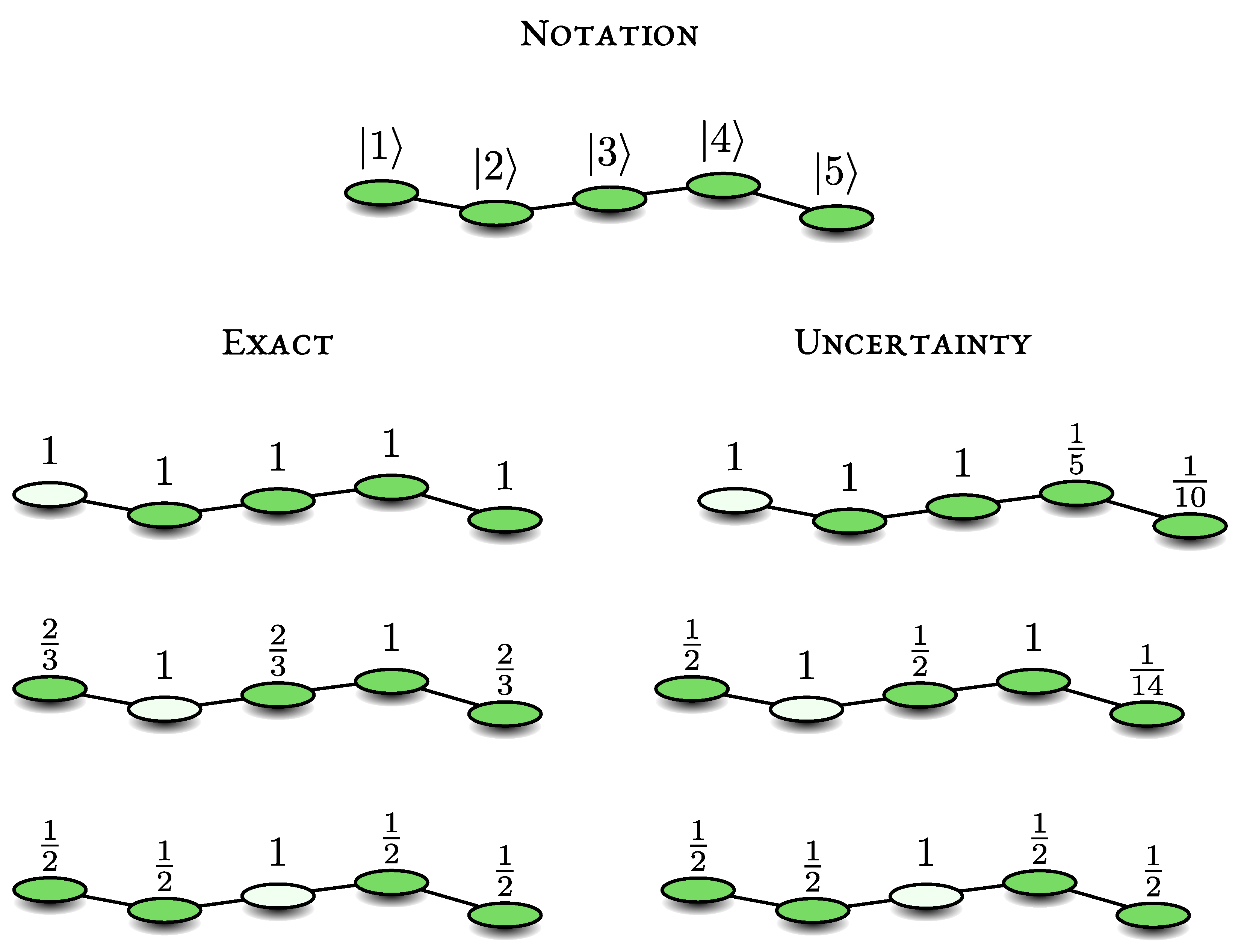
3. Lower Bound Using the Propagator
A bright state is an initial condition that is eventually detected with probability one and
, while a dark state is never detected, and
. Following [
24,
25], it is not difficult to show that if
is a normalised bright state then
is bright as well. We will soon present simple arguments to explain this statement, but first let us point out its usefulness. Clearly it follows that
is bright when
k is a non-negative integer. As a bright-state seed consider the following state
.
is an obvious bright state since it is detected in the first measurement attempt with probability one, because
. It therefore follows that the states
are all bright.
Why is
bright in the first place? As is well known, the energy basis is complete. Less well known is that we may construct a complete set of stationary eigenstates of
H which are either bright or dark [
25]. In [
25], we presented a formula for the stationary dark and bright states, making this statement more explicit, but for now all we need to know is that the finite Hilbert space can be divided into these two orthogonal subspaces denoted
(bright) and
(dark). Let
be a specific stationary dark state, and
j is an index enumerating this family of states, and
the corresponding energy. Then clearly
since the dark state is orthogonal to the bright one and
gives a phase
. It follows that
has no dark component in it and hence it is bright. Thus, the whole approach is based on the fact that we may divide a finite Hilbert space to a dark and bright subspaces (see also [
29,
30,
31]).
We notice in the same way that the sequence
is also bright. As a consequence, since
is bright, the state
is also bright. So when starting at the state
, the system is detected with probability one, as was shown previously using other methods [
12,
28].
We now see that
are bright states. However they are not orthogonal. We may choose the first two terms and construct two orthogonal bright vectors
where
N is a normalization constant and
, the detected state, is not an eigenstate of
. We note that using a similar approach it is not difficult to obtain further orthogonal bright states. Furthermore, the infinite sequence in Equation (
3) is over-complete. To construct a bright space, we must find a set of orthogonal vectors forming a basis, using for example the Gram–Schmidt method. Formally the bright space is
where
is the set containing all linear combinations of vectors of the states in the parentheses. Below we will construct this space explicitly for some simple examples, however in general this demands crunching linear algebra. For this reason the here-presented uncertainty relation, is useful in many cases.
When we have found a complete set of orthonormal basis vectors, which are either dark or bright states, the detection probability is given by [
8];
where the summation is over a bright basis which as usual has many representations. It follows that
We then find
provided that the initial state and the detected one are orthogonal
. Note that
and
are solutions of the Schrödinger equation in the absence of measurement starting with
and
, respectively, hence the lower bound relates the dynamics of a measurement-free process at time
to the detection probability, which is the outcome of the repeated measurement process. The bound generally depends on
and at least in principle one may search for
that maximizes its right hand side. When
is small, we may expand the propagator to second order
and then find
where
characterises the fluctuation of the energy in the detected state. Thus, the detection probability is bounded by the transition matrix from the initial to the detected state divided by the fluctuations of the energy in the latter. What comes to us as a surprise is that this result is valid for practically any
, as we will show after a few remarks.
Remark 1. Our results are valid for finite size systems, like finite graphs. For infinite systems, it is not always possible to divide the Hilbert space into two sub-spaces dark and bright. For example for a one-dimensional tight-binding quantum walk on a lattice, with non-zero jump amplitude to nearest neighbours only, starting on a node called the origin and measuring there, the non-zero detection probability is less than unity [17]. This means that is not bright for an infinite system, which is physically obvious as the wave packet can spread to infinity and hence the particle can escape detection. Remark 2. The states are bright and similarly with . Can we find a bright state orthogonal to these states? The answer is negative, and hence these states can be used to span the bright subspace. Assume is an initial condition which is bright. At the first measurement, at time τ, the amplitude of detection is . However, this is zero by the assumption that is orthogonal to the just obtained set of bright states. We may continue with this reasoning for the second, third, etc measurements, and we see that detection amplitude of is always zero. It follows that state is not bright.
4. Uncertainty Relation
Let
be a bright state, then also
is bright where
is an analytical function. Indeed similar to the previous section
and hence the state
is orthogonal to the dark states, meaning it is bright. As we showed already the state
is bright so we find a sequence of bright states
We use the same approach as in the previous section, namely we use the first two states and find two orthonormal bright states
The normalization constant is given by
where
. Since
H is Hermitian, inserting Equation (
12) in Equation (
7), and assuming no overlap of the initial state with the detection one,
we get Equation (
9). Thus, that formula is valid for any
.
For the more general case when the initial overlap with the detection state is not zero, we define
Since
is the square of the overlap of the initial state and the detected one, it gives the probability to detect the particle in a single-shot measurement at time
. So
is the difference between the probability of detection after repeated measurements and the initial probability of detection. Using Equations (
7) and (
12) and
we find
Here
is the commutator of the Hamiltonian and the projector describing the measurement. If
the right hand side is equal to zero and we find
, hence here the uncertainty relation indicates that the detection probability is unity.
Remark 3. The matrix element can always be set to be non-zero by a global shift of the energy, hence is well defined. In the final result we can switch back to any choice of energy scale, since the is insensitive to the definition of the zero of energy.
Remark 4. For the stroboscopic sampling, recurrences and revivals imply that special sampling times τ defined through exhibit resonances [12,17] such that the bounds based on energy are invalid. Here is the energy difference between any pair of energy levels in the system. In this case, the starting point of the analysis should be Equation (1) and not Equation (11). Remark 5. We believe, that our results are generally valid for other detection protocols, for examples when we sample the system randomly in time, following a Poissonian process [11,28]. Indeed the state is bright, for generic measurement protocols, beyond the stroboscopic one [28]. Similarly, stationary dark states are generically dark. However, so far we have not proven that all the bright states of the stroboscopic protocol, are generically bright, under arbitrary repeated measurement protocols. In principle, an amplitude on a node of the system, can be zero at some set of times, and if one chooses these special and non-typical times for measurements, the detection probability can be set to zero (e.g., the measure zero exceptional points in the previous remark). A mathematical study of our main result, for general repeated measurement protocol, is left for future work. 5. The Reverse Dark Approach
Assume
is a normalised dark state, then as before the states
are dark as well. In fact since by definition a system initially in a dark state
is never detected, it follows immediately that
and
are dark (see remark below). However, there is no symmetry between dark and bright states, in the sense that, every system has at least one bright state
, but not every system necessarily has a dark state. As we showed in [
25], totally bright systems have non-degenerate energy levels and all the energy eigenstates have a finite overlap with the detected state. Still, let us assume that we find a state
, which is dark, we can then apply nearly the same strategy as before to find an upper bound for
. We use
and
to construct two orthonormal dark states
where
N is a normalization constant. Clearly here we assume that the dark state
is not a stationary state of the system, since otherwise
is not defined. Analogous to Equation (
6), the detection probability is [
25]
Here the summation is over a basis of the subspace
. Since all the terms in the sum are clearly non-negative
For simplicity, assume that
. Then using the normalization
N, we find
Now we have an upper bound. As mentioned in the introduction, the detection probability even for small quantum systems on a graph, can be less than unity, unlike the corresponding classical walks. So this is a useful bound provided that we can identify
. Notice that the variance of energy is now obtained with respect to the dark state
. Of course, this state is dark with respect to a state
so while the detector does not appear explicitly in our formula, it is obviously important.
We now relax the condition
. Let
be the probability that initially the system is not in the dark state
(hence the subscript
). We consider the deviation
, and find
Unlike the lower bound Equation (
14), here the commutator on the right hand side, is between the Hamiltonian and a projector of the dark state, while previously the commutator was of
H and the projector of the detector state.
8. Discussion
This work relied on the partition of the Hilbert space into dark and bright sub-spaces. Probably the best known example, is the case of rapid measurements,
[
35]. Then, when measuring on a node of the graph, it is not difficult to find a basis for this pair of sub-spaces. The measured node is obviously the bright sub-space, since the particle is detected with probability one at the first measurement. Localized initial states, on all the other nodes are dark, since the square modulus of the amplitude at the detected site is of order
(unlike classical walks where the corresponding probability increases like
) and hence
in this limit. It was later realised that the splitting of the Hilbert space into two components, does not need to rely on fast measurements [
10,
29,
30,
31]. The general mechanism behind this effect is destructive interference. Recently, we expressed the dark and bright sub-space of a general Hamiltonian in terms of its eigenstates [
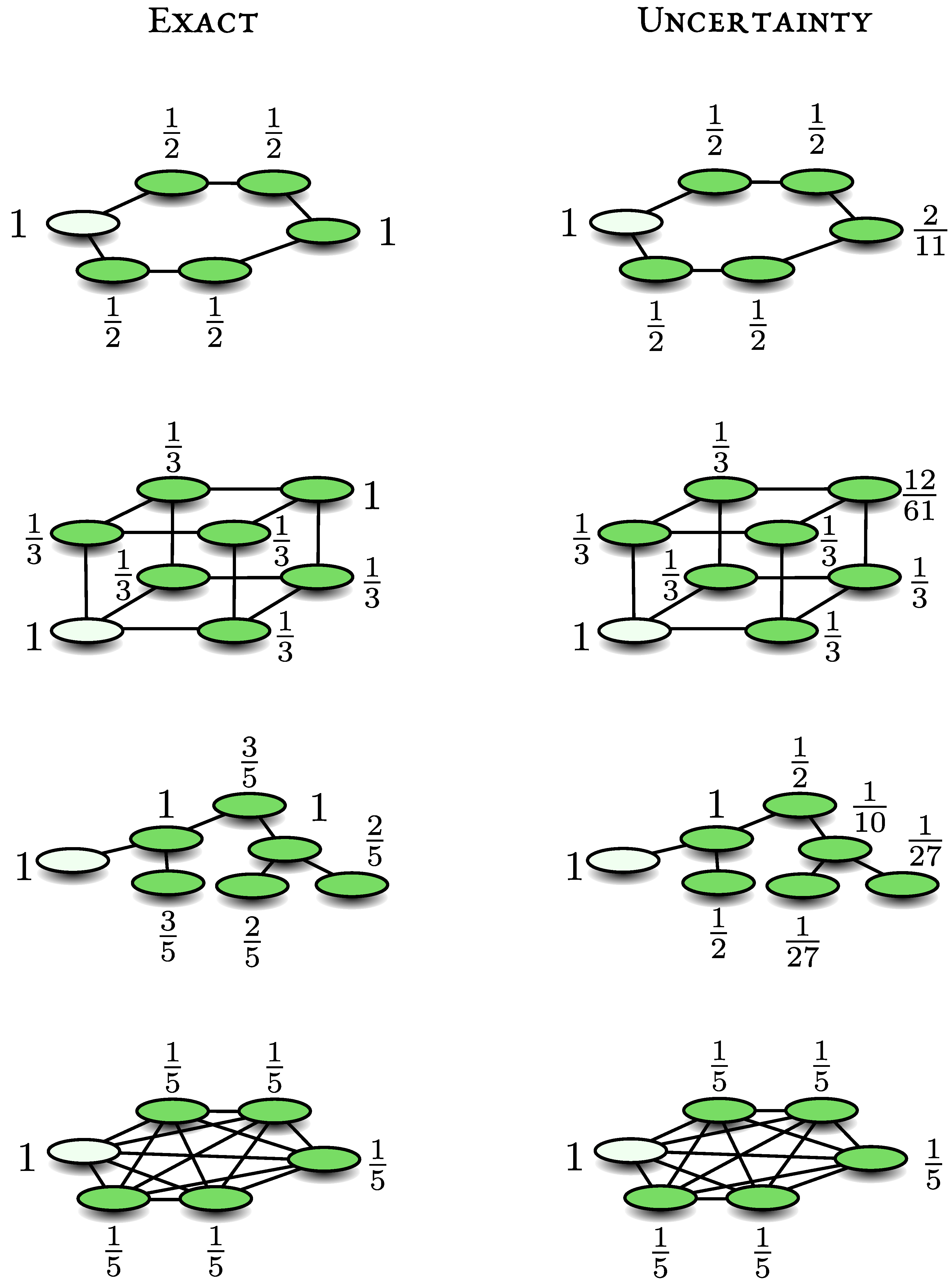
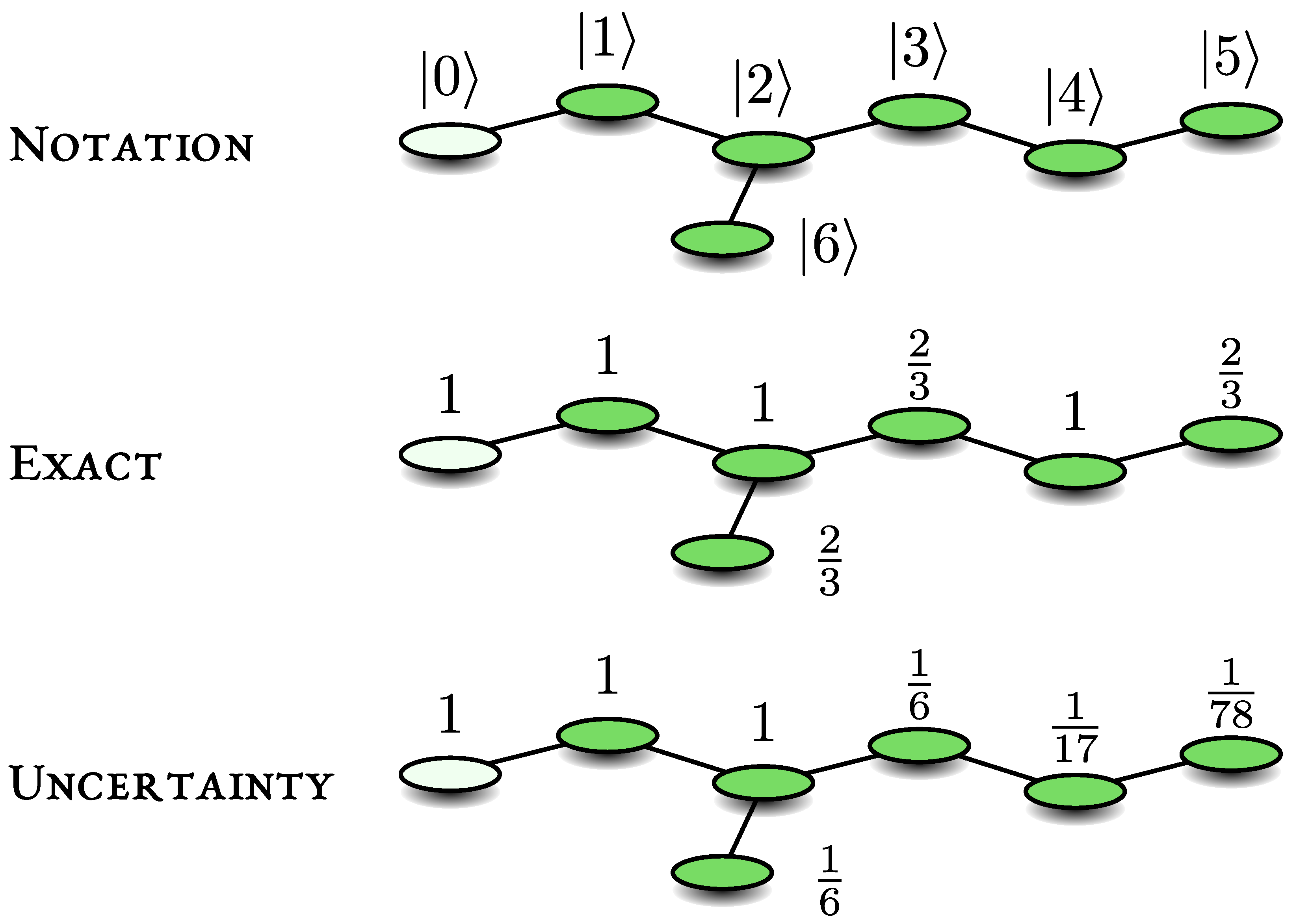
25]. Using this, we could find here a bound for the detection probability, in the form of an uncertainty principle.
The splitting of the Hilbert space into two components, resembles the splitting of a classical system into two disjoint components, namely ergodicity breaking. Let us assume we have such a classical system, which is split into non-connected domains A and B. We add a detector within one sector, say A. If we detect the particle, we know that it started in A, otherwise it started in B. In the quantum world we may start in a superposition state, with components in both the dark and bright sub-spaces. Hence, this situation is very different as compared with the classical case of ergodicity breaking, leading to non-trivial even if H itself describes a fully connected system.
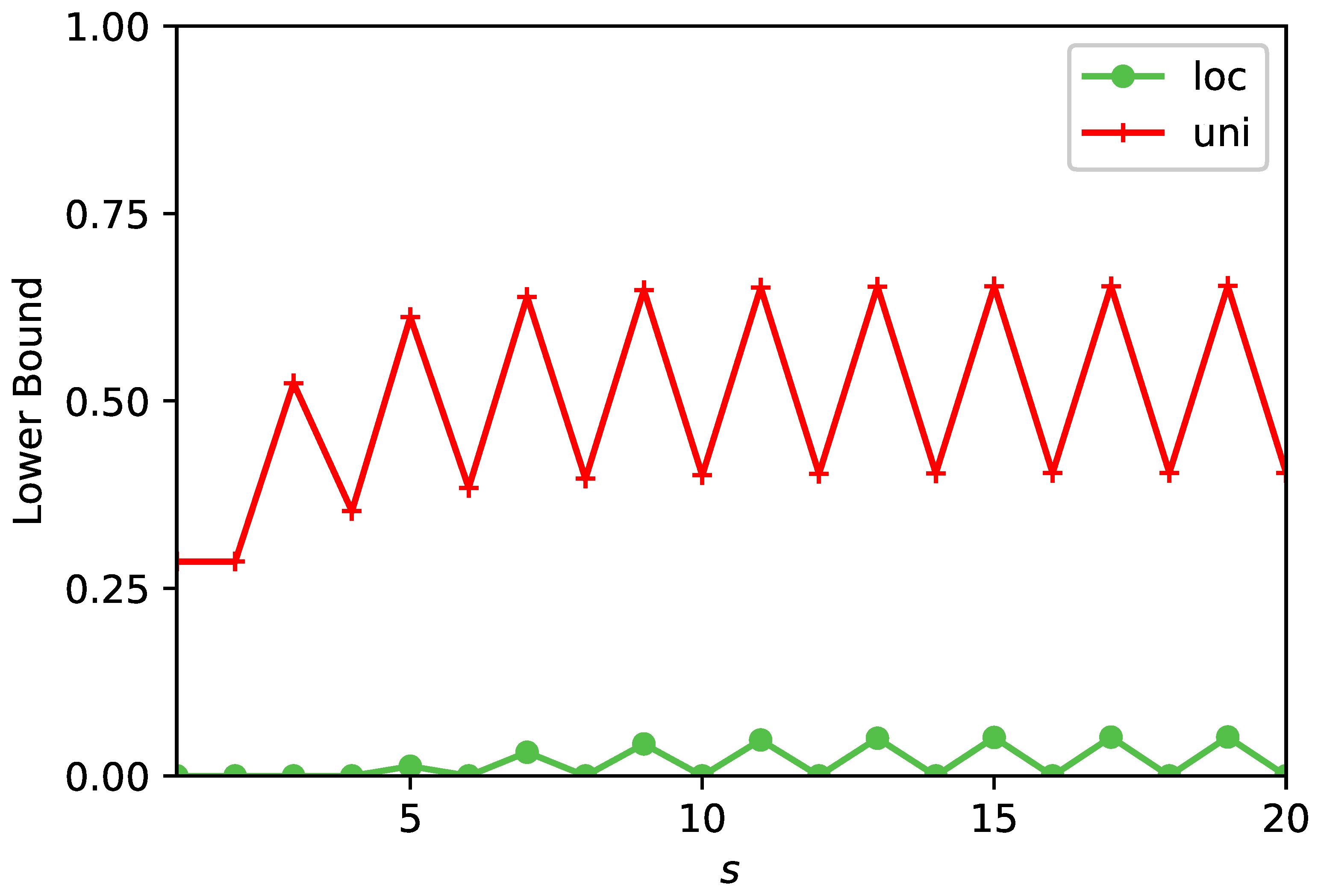
The uncertainty relation Equation (
14) does not depend on the measurement frequency
and in that sense it is universal. However, in some cases, its right hand side is equal to zero. In particular, as shown here, this occurs when an initial localised state and a detected localised state are far from each other and the Hamiltonian describes a finite range of jump amplitudes. A second relation, Equation (
20), depends on the free parameter
s, allowing to connect between distant states, and this permits an easy calculation of a nontrivial lower bound for
. We showed how to optimise the choice of
s, improving the lower bound. As mentioned, more advanced methods, intended for larger systems, are discussed in [
24]. A general strategy, to improve the results obtained here, is based on further collecting bright or dark states, instead of the two we used in Equations (
7), (
12) and (
19). In principle, and in particular with a simple computer program, one may use more states with a Gram–Schmidt method, and gain tighter bounds than those found here. However, that comes at a cost, namely the theory becomes in some sense cumbersome, as compared to the uncertainty principle discussed here.
In this article we considered repeated strong measurement as the protocol of choice. Due to the wide range of quantum measurement theories, one must wonder how general are the results presented here? While the answer to this question is left for future work, we may speculate the following. The mechanism leading to dark states is in principle simple: the amplitude of the wave function at
is equal to zero forever. Hence any choice of a measurement theory or any measurement protocol, that is reasonably physical in the sense that it postulates that we cannot detect nor influence the state of the particle if the amplitude of finding it is zero, will yield the same dark states as for strong measurements. Still, we cannot claim any results for weak measurements [
36]. We believe that our results, hold also for the well-known non-Hermitian approach, where the detection is modelled with a sink. For the limit of small
it was shown [
14,
20] that one may use a non-Hermitian approach to model the strong detection protocol considered here. Hence, the two approaches have many things in common. Instead of stroboscopic sampling one may use temporal random sampling, for example sampling times drawn from a Poisson process [
11,
28]. Again we believe that this will not alter our results since the destructive interference is found also in this case. The fact that our results are
independent is another argument for the generality of the approach.
The uncertainty principle investigated here, is different from the standard approaches [
37,
38,
39,
40]. These are roughly divided into two schools of thoughts. The text-book momentum-position uncertainty relation, is a measure of uncertainty in the state function. To verify it, one needs to perform two sets of measurements obtaining the uncertainty in
x and
p independently. The second, is the disturbance approach originating from the
-ray thought experiment [
37]. This dichotomy continued to attracted considerable research until recently [
41,
42,
43,
44,
45,
46,
47,
48]. Our approach is different from both and this is obviously related to the fact that we consider repeated measurements which back-react and modify the unitary evolution and also to the observable of interest: the detection probability. The uncertainty relation found here, can be extended to other observables. In [
27], a time-energy relation was discovered for the fluctuations of the return time, with an interesting dependence on the winding number of the problem.
As for possible experimental observation, the quantum walk has already been demonstrated, using single neutral particles and site-resolved microscopy [
49,
50]. Usually, the focus is on the measurement of the propagation of the packet of particles. This demands what we may call a global measurement searching for the position of the particle at time
t, while we are considering a spatially local measurement which detects the particle on a single target node of a graph. Such experiments, on the recurrence problem, were conducted in [
51] with coherent light using strong projections, the number of repeated measurements was roughly forty. Thus, measurements of the quantum detection probability
, and the uncertainty principle, are within reach.
Usual uncertainty relations are statements showing the departure of quantum reality from classical Newtonian mechanics. Here however, we are dealing with the departure of quantum search from its classical random walk counterpart. In Equation (
14) we use the fluctuations of energy in the detected state
and it is natural to consider its meaning in a measurement protocol. The observer repeatedly attempts to detect the particle and once successful, namely the particle is detected, the particle is in state
. Once the particle is detected we stop the monitoring measurements on
. This means that in this second stage of the experiment the energy is a constant of motion. We now measure
H. Hence repeating the protocol many times we have from the first stage of the experiment an estimate for
and from the second the variance of
H in the detected state is obtained. It follows that at least in principle there is a physical meaning to the variance of
H in the detected state, as these are the fluctuations after the particle is finally detected (if the particle is not detected, we do not record the energy). It follows that we may rewrite Equation (
14) in a form that emphasizes the role of the state function. Since the final wave function, after a
successful detection is
we have
The same holds more generally for
. Note that
is a constant of motion after the successful detection, since as mentioned we stop the repeated detection attempts once obtaining the yes click. This means that the observer does not need to measure the fluctuations immediately after the successful detection and there is no issue with the violation of the energy-time principle.







{kind=link}
{kind=link}
{kind=link}
{kind=link}