
Misalignment Fault Prediction of Wind Turbines Based on Improved Artificial Fish Swarm Algorithm

Abstract
:1. Introduction
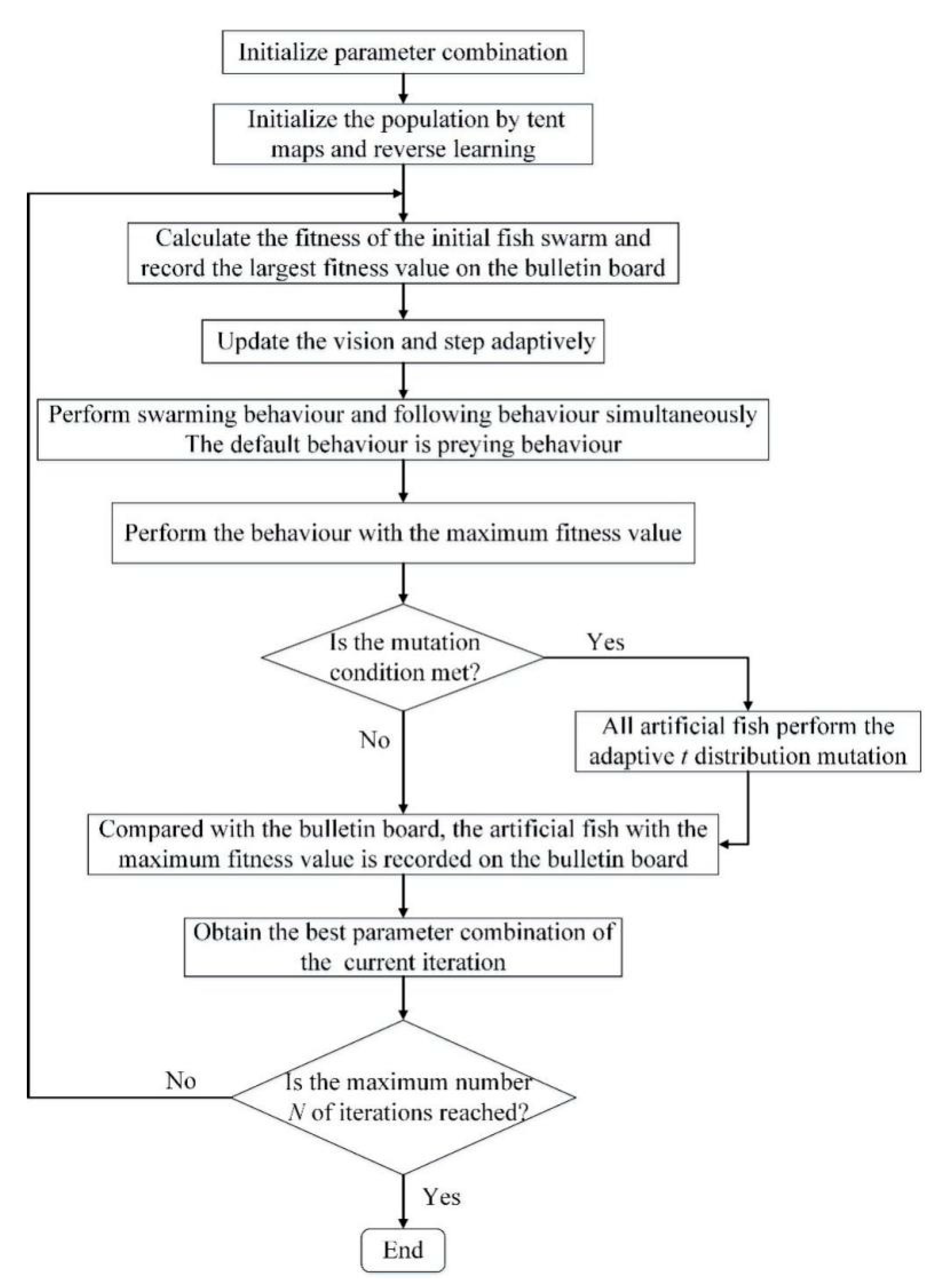
2. Improvement of Artificial Fish Swarm Algorithm
2.1. Initialize the Population by Tent Maps and Reverse Learning
- (1)
- Randomly generate the initial chaotic vector , where D is the number of parameters to be optimized, which is set to 2 in this paper. The vector should avoid falling into the small cycle [17].
- (2)
- Assumed that the maximum iteration number of tent maps is M. The expression of the tent map is given by:After Bernoulli shift transformation [18], it can be expressed as:where , .
- (3)
- After the iteration is performed by Equation (2), is obtained.
- (4)
- If the vector falls into the small cycle or a fixed point during the iteration, the initial value of the iteration is changed according to the equation [19], where is a random number. Otherwise, step (3) continues to be performed.
- (5)
- If the current iteration reaches M, the mapping is terminated and the final tent chaotic vector is obtained. Otherwise, step (3) continues to be performed.
- (1)
- Firstly, randomly generate the initial chaotic vector . According to the step of the tent map, when the iteration reaches M, the final tent chaotic vector is obtained.
- (2)
- The initial candidate solutions can be obtained by the equation .
- (3)
- According to the Equation (3), the reverse solution of can be obtained, where .
- (4)
- Calculate the fitness values of and , and sort the fitness values from high to low. The first S individuals with higher fitness are selected as the initial population of AFSA.
2.2. Adaptive Vision and Step
2.3. Adaptive t Distribution Mutation
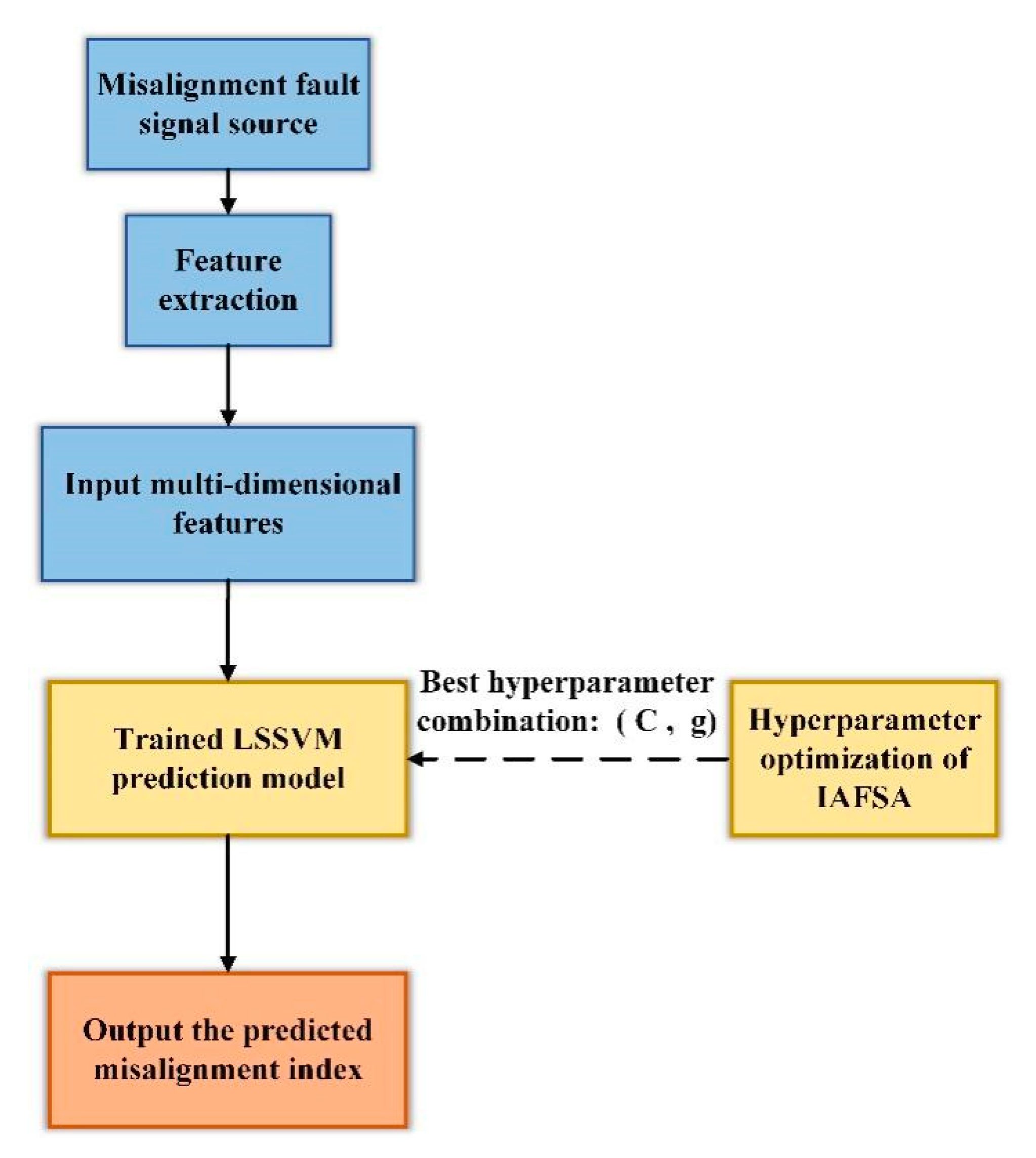
2.4. The LSSVM Optimized by IAFSA
3. Data Collection and Feature Selection of Misalignment Fault
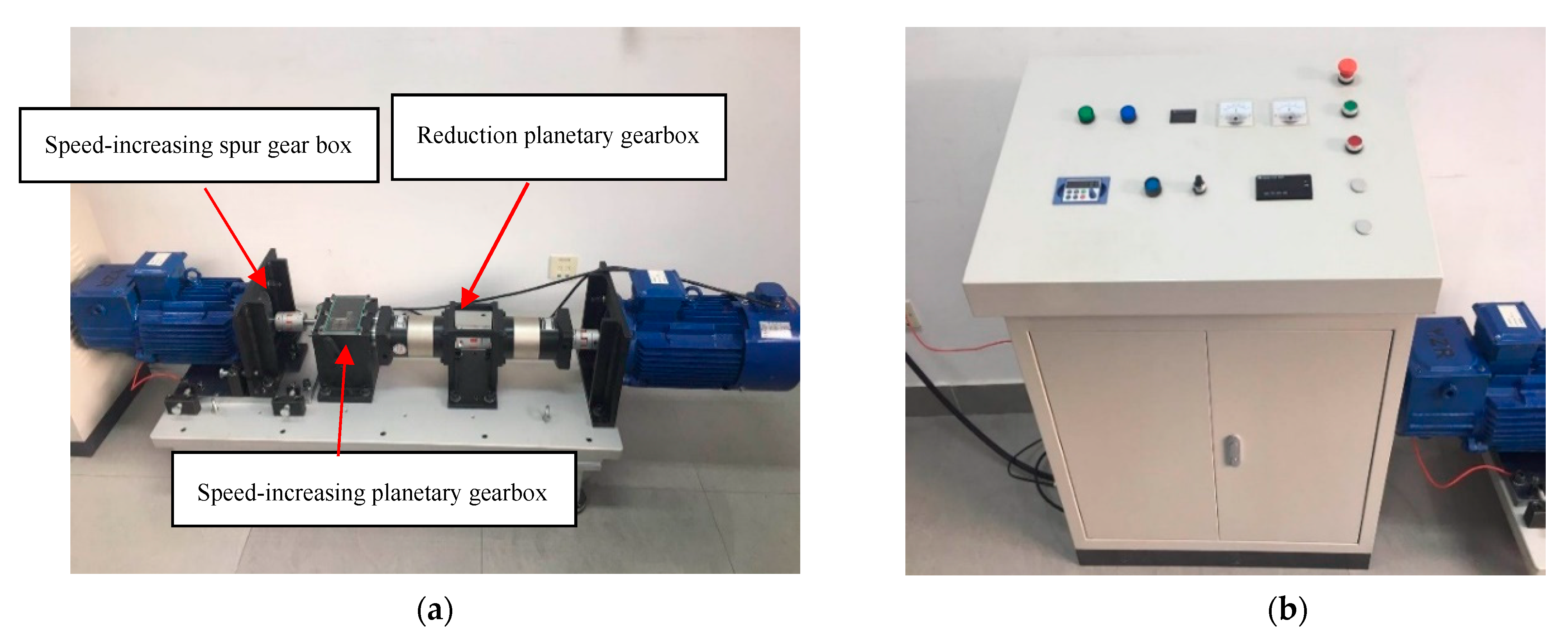
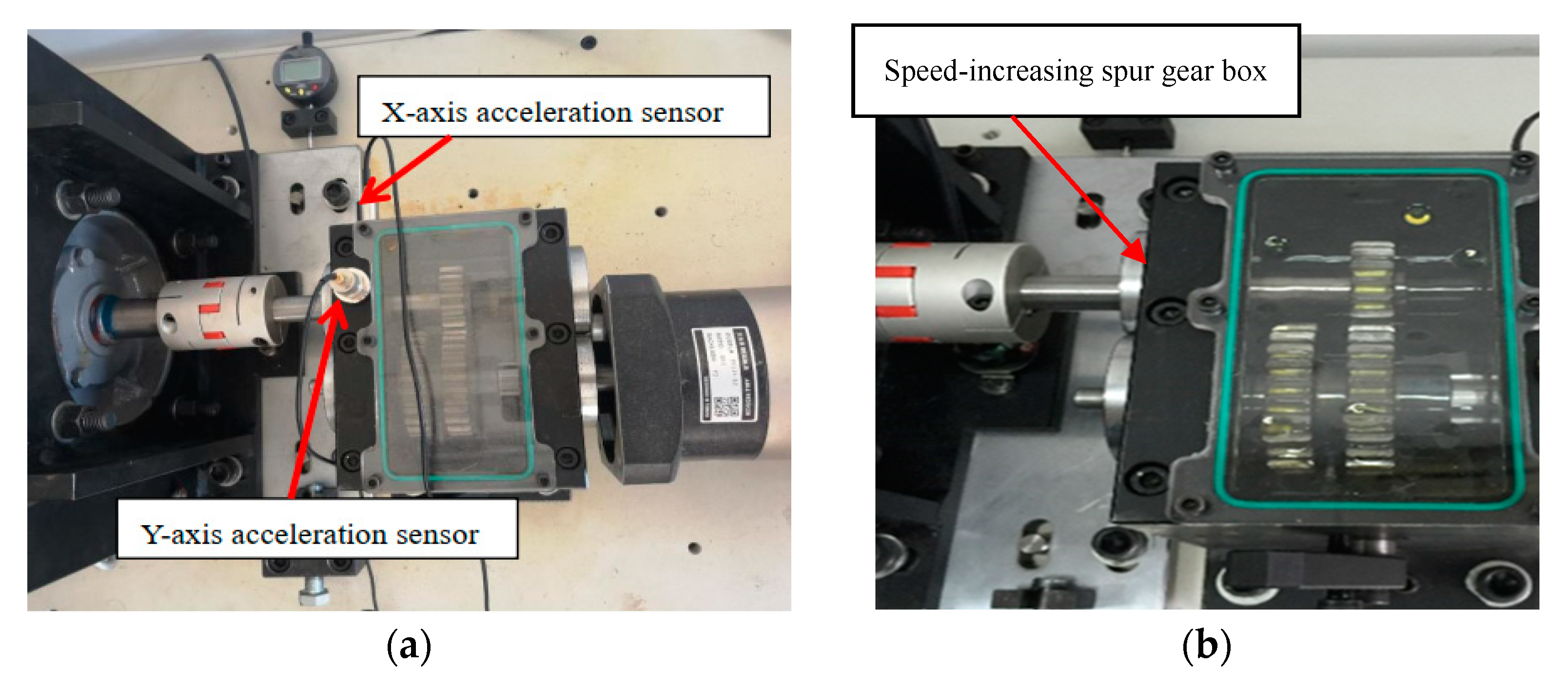
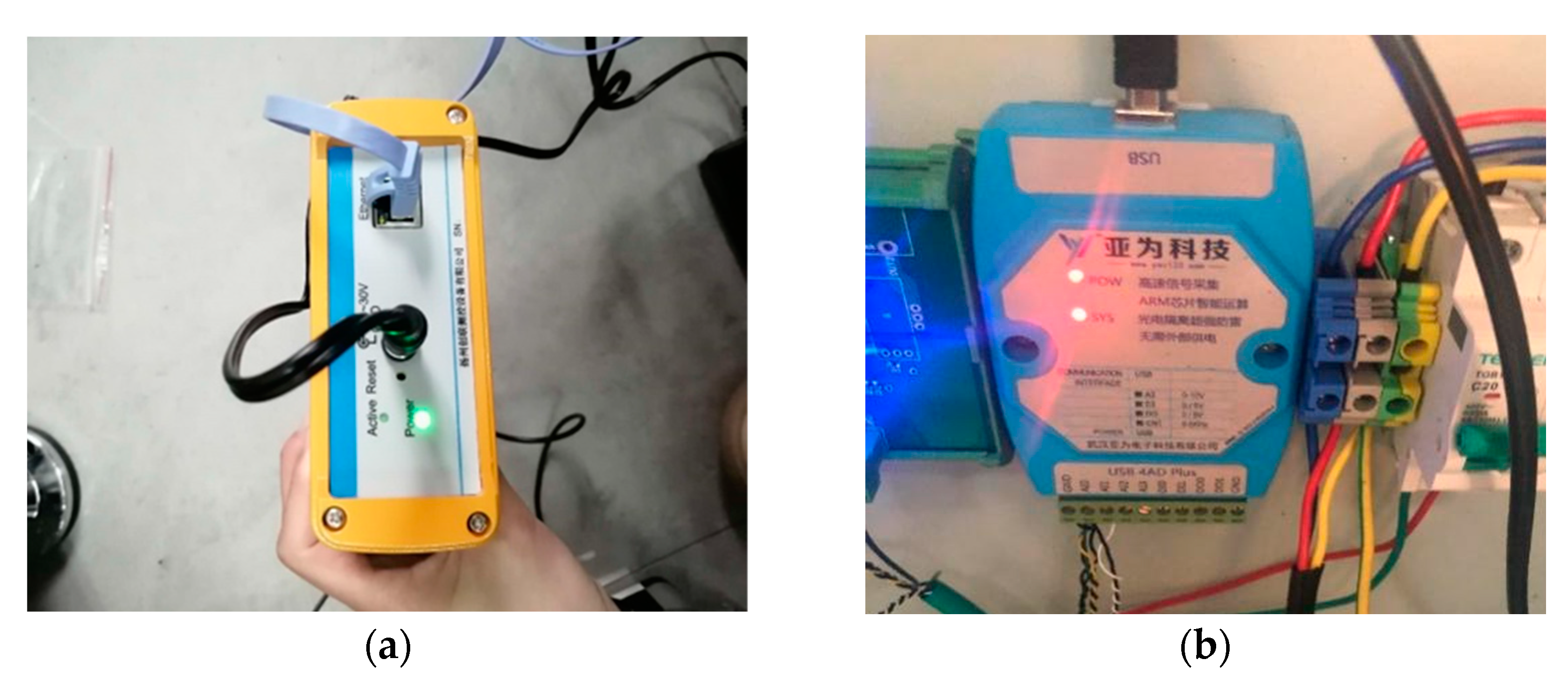
3.1. Data Collection of Misalignment Fault
3.2. Input and Output Features of Prediction Model for Misalignment Fault
4. Misalignment Fault Prediction Based on IAFSA
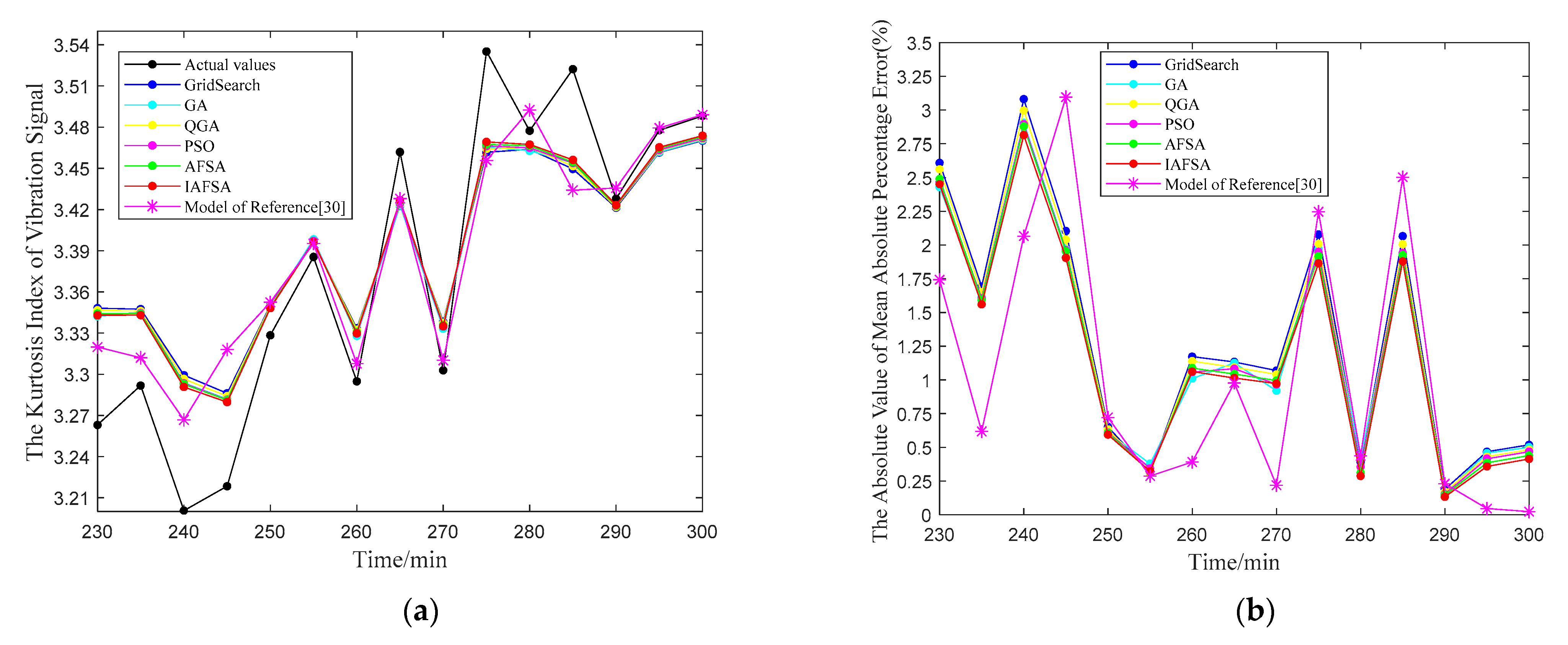
4.1. Prediction Results of Misalignment Fault Based on Vibration Signals
- (1)
- In the test set, compared with other algorithms, the RMSE and MAPE indexes of IAFSA_LSSVM are the smallest, which indicates that the prediction error of LSSVM optimized by IAFSA is the smallest. In addition, the R2 index of IAFSA_LSSVM is the largest among all the algorithms, which means that the changing trend predicted by IAFSA_LSSVM is the most consistent with that of real data. Comprehensive comparison of the above three indicators, IAFSA_ LSSVM has the best prediction effect in the testing set, followed by the combination prediction of Reference [30], AFSA, PSO, GA, QGA and GridSearch.
- (2)
- In the training set, the RMSE and MAPE indexes of IAFSA_LSSVM are the smallest, and the R2 index is the largest. Therefore, the IAFSA_LSSVM has the highest prediction accuracy, followed by the combination prediction of Reference [30], AFSA, QGA, GridSearch, PSO and GA.
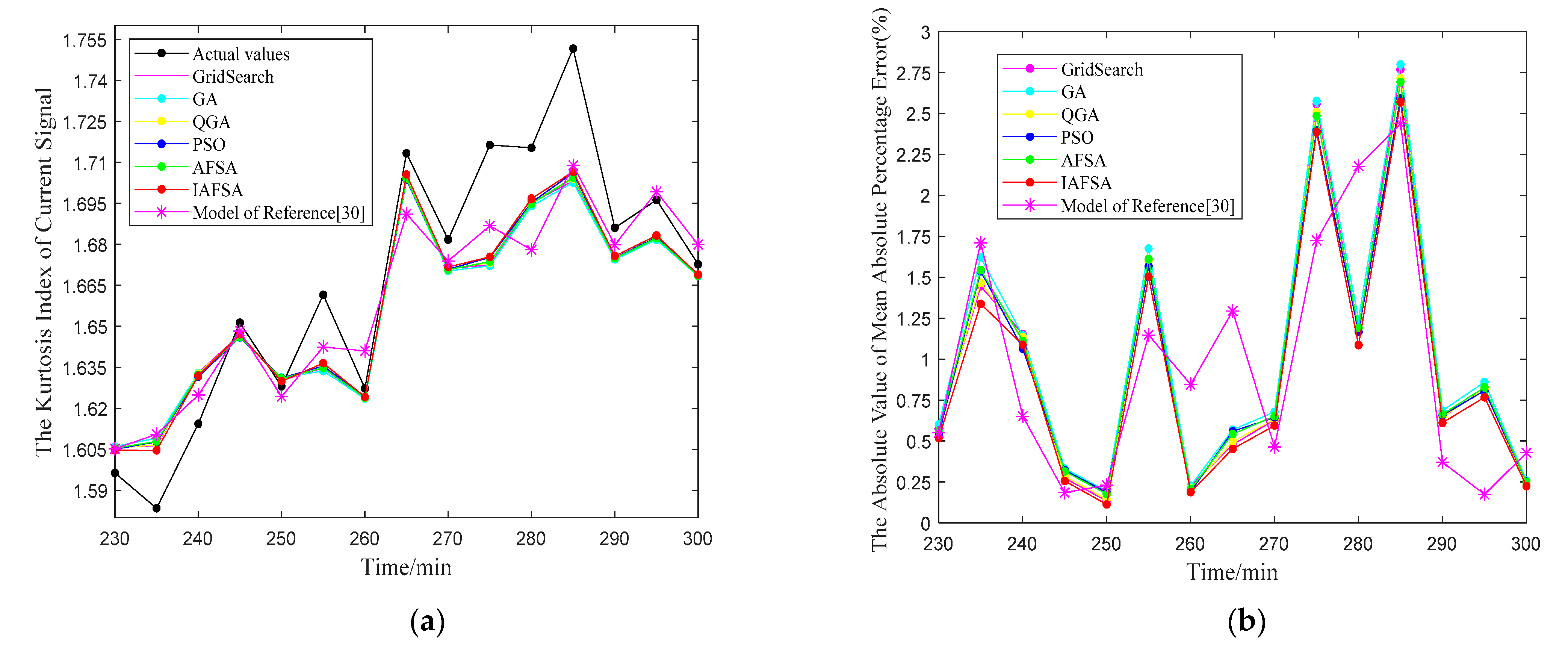
4.2. Prediction Results of Misalignment Fault Based on Current Signals
- (1)
- In the test set, IAFSA_ LSSVM has the smallest RMSE and MAPE, and it has the largest R2, which indicates that the prediction error of IAFSA_ LSSVM is the smallest, and the fitting degree of IAFSA_ LSSVM between the predicted value and the real value is the best, followed by the combination prediction of Reference [30], PSO, QGA, AFSA, GridSearch and GA.
- (2)
- In the training set, Comprehensive comparison of RMSE, MAPE and R2, IAFSA_ LSSVM has the highest prediction accuracy, followed by GridSearch, QGA, the combination prediction of Reference [30], AFSA, GA and PSO.
4.3. Realization of Misalignment Fault Warning
5. Conclusions
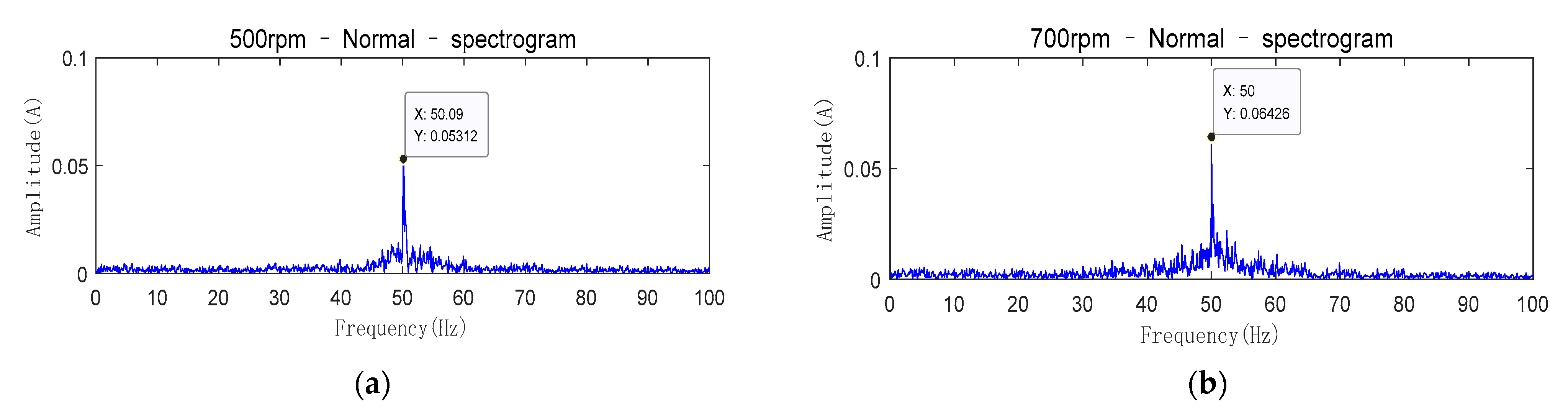
- After analyzing the collected misalignment fault vibration and current signals in the time domain and frequency domain, it is proved that the early fault signs of misalignment are not very obvious, and the misalignment fault is a slowly changing latent fault.
- The AFSA is improved. The IAFSA can find the optimal hyperparameter solution of the LSSVM model, and its prediction accuracy is the highest compared with other optimization algorithms.
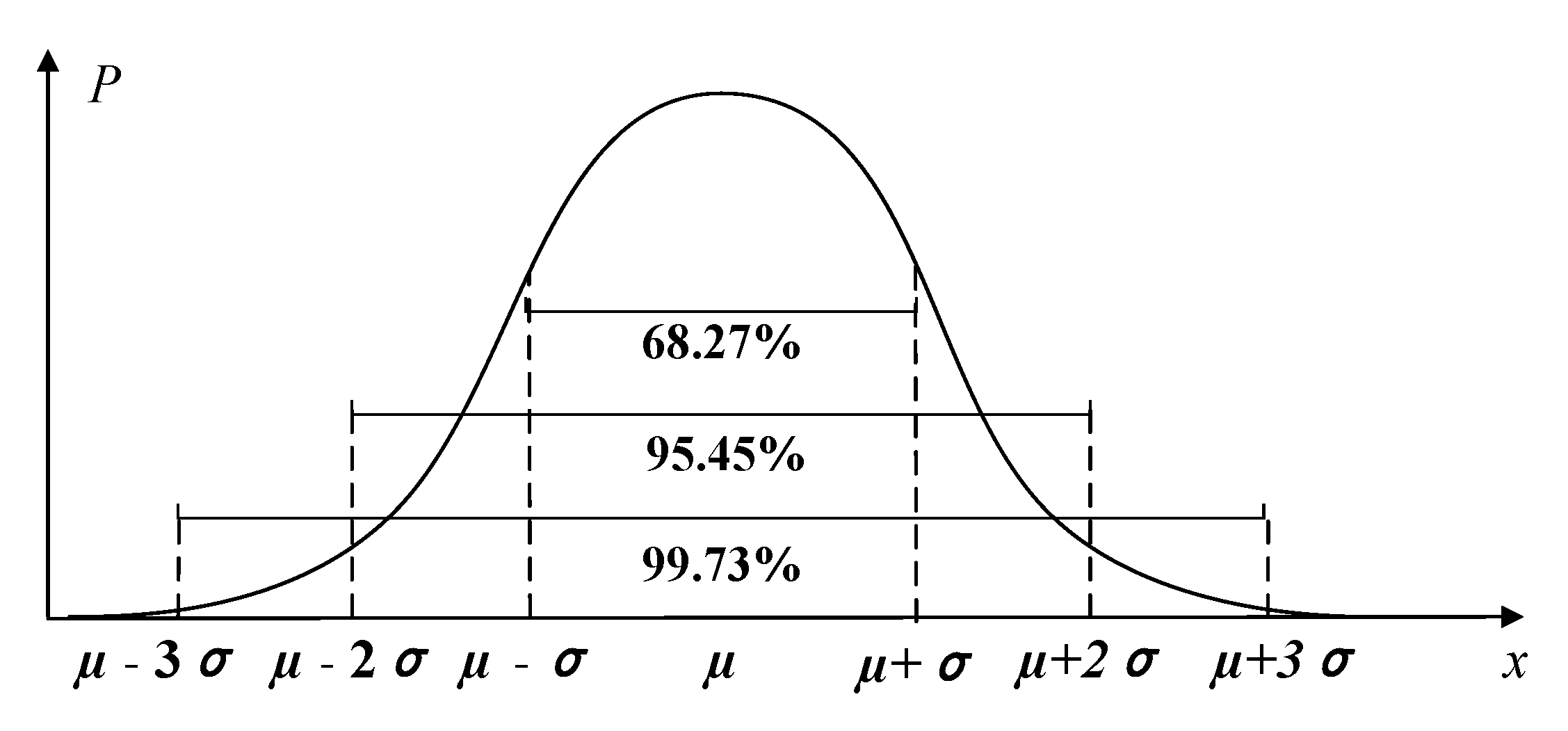
- According to the 3σ principle of the normal distribution, the early warning line of vibration and current signals is set. The experimental results prove that the proposed prediction model achieves a relatively accurate prediction and early warning for misalignment fault of wind turbines.
Author Contributions
Funding
Conflicts of Interest
References
- Pek, A. GWEC: Wind Power Industry to Install 71.3 GW in 2020, Showing Resilience during COVID-19 Crisis [EB/OL]. Available online: https://gwec.net/gwec-wind-power-industry-to-install-71-3-gw-in-2020-showing-resilience-during-covid-19-crisis (accessed on 5 November 2020).
- Xiao, Y.; Wang, Y.; Mu, H.; Kang, N. Research on Misalignment Fault Isolation of Wind Turbines Based on the Mixed-Domain Features. Algorithms 2017, 10, 67. [Google Scholar] [CrossRef] [Green Version]
- Beretta, M.; Julian, A.; Sepulveda, J.; Cusidó, J.; Porro, O. An Ensemble Learning Solution for Predictive Maintenance of Wind Turbines Main Bearing. Sensors 2021, 21, 1512. [Google Scholar] [CrossRef]
- Elasha, F.; Shanbr, S.; Li, X.; Mba, D. Prognosis of a Wind Turbine Gearbox Bearing Using Supervised Machine Learning. Sensors 2019, 19, 3092. [Google Scholar] [CrossRef] [Green Version]
- Tang, M.; Chen, W.; Zhao, Q.; Wu, H.; Long, W.; Huang, B.; Liao, L.; Zhang, K. Development of an SVR Model for the Fault Diagnosis of Large-Scale Doubly-Fed Wind Turbines Using SCADA Data. Energies 2019, 12, 3396. [Google Scholar] [CrossRef] [Green Version]
- Verma, A.K.; Sarangi, S.; Kolekar, M. Misalignment faults detection in an induction motor based on multi-scale entropy and artificial neural network. Electr. Power Compon. Syst. 2016, 44, 916–927. [Google Scholar] [CrossRef]
- Santos, P.; Villa, L.F.; Reñones, A.; Bustillo, A.; Maudes, J. An SVM-based solution for fault detection in wind turbines. Sensors 2015, 15, 5627–5648. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pennacchi, P.; Vania, A. Diagnosis and model based identification of a coupling misalignment. Shock Vib. 2005, 12, 293–308. [Google Scholar] [CrossRef]
- Baghban, A.; Piri, A.; Lakzaei, M.; Janghorban Lariche, M.; Baghban, M. On the prediction of solubility of alkane in carbon dioxide using the LSSVM algorithm. Pet. Sci. Technol. 2019, 37, 1231–1237. [Google Scholar] [CrossRef]
- Yan, W.; Li, M.; Pan, X.; Wu, G.; Liu, L. Application of support vector regression cooperated with modified artificial fish swarm algorithm for wind tunnel performance prediction of automotive radiators. Appl. Therm. Eng. 2020, 164, 114543. [Google Scholar] [CrossRef]
- Zhang, C.; Zhang, F.; Li, F.; Wu, H.-S. Improved artificial fish swarm algorithm. In Proceedings of the 2014 9th IEEE Conference on Industrial Electronics and Applications, Hangzhou, China, 9–11 June 2014; pp. 748–753. [Google Scholar]
- Ma, H.; Wang, Y. An artificial fish swarm algorithm based on chaos search. In Proceedings of the 2009 Fifth International Conference on Natural Computation, Tianjian, China, 14–16 August 2009; Volume 4, pp. 118–121. [Google Scholar]
- Neshat, M.; Adeli, A.; Sepidnam, G.; Sargolzaei, M.; Toosi, A.N. A review of Artificial Fish Swarm Optimization methods and applications. Int. J. Smart Sens. Intell. Syst. 2012, 5, 107–148. [Google Scholar] [CrossRef] [Green Version]
- Zhu, W.; Bao, H.; Zeng, Z.; Wen, Z.; Zhu, Y.; Xiang, H. Support Vector Machine Optimized Using the Improved Fish Swarm Optimization Algorithm and Its Application to Face Recognition. Int. J. Pattern Recogn. Artif. Intell. 2019, 33, 132–138. [Google Scholar] [CrossRef]
- Xu, Y.; Chen, H.G. A Novel Global Artificial Fish Swarm Algorithm with Improved Chaotic Search. Adv. Mater. Res. 2012, 1897, 2594–2597. [Google Scholar] [CrossRef]
- Tian, D. Particle Swarm Optimization with Chaos-based Initialization for Numerical Optimization. Intell. Autom. Soft Comput. 2018, 24, 331–342. [Google Scholar] [CrossRef]
- Kuang, F.; Zhang, S. A Novel Network Intrusion Detection Based on Support Vector Machine and Tent Chaos Artificial Bee Colony Algorithm. J. Netw. Intell. 2017, 2, 195–204. [Google Scholar]
- Mark, M.C. Lyapunov exponents for multi-parameter tent and logistic maps. Chaos 2011, 21, 043104. [Google Scholar]
- Shan, L.; Qiang, H.; Li, J.; Wang, Z.Q. Chaotic optimization algorithm based on Tent map. Control Decis. 2005, 20, 179–182. [Google Scholar]
- Liu, W. A multistrategy optimization improved artificial bee colony algorithm. Sci. World J. 2014, 2014, 129483. [Google Scholar] [CrossRef]
- Li, W.; Bi, Y.; Zhu, X.; Yuan, C.-A.; Zhang, X.-B. Hybrid swarm intelligent parallel algorithm research based on multi-core clusters. Microprocess. Microsyst. 2016, 47, 151–160. [Google Scholar] [CrossRef]
- Du, C.; Jiang, S.; Zhao, W. An adaptive multiscale approach for identifying multiple flaws based on XFEM and a discrete artificial fish swarm algorithm. Comput. Method. Appl. Methods 2018, 339, 341–357. [Google Scholar]
- Nduka, U.C.; Iwueze, I.S.; Nwogu, E.C. Efficient algorithms for robust estimation in autoregressive regression models using Student’s t distribution. Commun. Stat. Simul. Comput. 2020, 49, 355–374. [Google Scholar] [CrossRef]
- Xu, Y.; Chen, H.; Luo, J.; Zhang, Q.; Jiao, S.; Zhang, X. Enhanced Moth-flame optimizer with mutation strategy for global optimization. Inf. Sci. 2019, 492, 181–203. [Google Scholar] [CrossRef]
- Sun, G.; Lan, Y.; Zhao, R. Differential evolution with Gaussian mutation and dynamic parameter adjustment. Soft Comput. 2019, 23, 1615–1642. [Google Scholar] [CrossRef]
- Stefani, A.; Yazidi, A.; Rossi, C.; Filippetti, F.; Casadei, D.; Capolino, G.-A. Doubly Fed Induction Machines Diagnosis Based on Signature Analysis of Rotor Modulating Signals. IEEE Trans. Ind. Appl. 2008, 44, 1711–1721. [Google Scholar] [CrossRef]
- Xiao, Y.; Xue, J.; Zhang, L.; Wang, Y.; Li, M. Misalignment Fault Diagnosis for Wind Turbines Based on Information Fusion. Entropy. 2021, 23, 243. [Google Scholar] [CrossRef]
- William, T.; Mark, F. Case Histories of Current Signature Analysis to Detect Faults in Induction Motor Drives. In Proceedings of the IEEE International Electric Machines and Drives Conference (IEMDC’03), Madison, WI, USA, 1–4 June 2003; pp. 1459–1465. [Google Scholar]
- Xiao, Y.; Hong, Y.; Chen, X. The Application of Dual-Tree Complex Wavelet Transform (DTCWT) Energy Entropy in Misalignment Fault Diagnosis of Doubly-Fed Wind Turbine (DFWT). Entropy 2017, 19, 587. [Google Scholar] [CrossRef] [Green Version]
- Xiao, Y.; Hua, Z. Misalignment Fault Prediction of Wind Turbines Based on Combined Forecasting Model. Algorithms 2020, 13, 56. [Google Scholar] [CrossRef] [Green Version]
- Wang, T.; Chu, F.; Han, Q.; Kong, Y. Compound faults detection in gearbox via meshing resonance and spectral kurtosis methods. J. Sound Vib. 2017, 392, 367–381. [Google Scholar] [CrossRef]
- Yuan, Y.; Shao, C.; Cao, Z.; Chen, W.; Yin, A.; Yue, H.; Xie, B. Urban Rail Transit Passenger Flow Forecasting Method Based on the Coupling of Artificial Fish Swarm and Improved Particle Swarm Optimization Algorithms. Sustainability 2019, 11, 7230. [Google Scholar] [CrossRef] [Green Version]
- Jiao, B.; Gao, Z.W. The Fault Diagnosis of Wind Turbine Gearbox Based on QGA-LSSVM. Appl. Mech. Mater. 2014, 3082, 950–955. [Google Scholar] [CrossRef]
- Zhu, P.; Qian, H.; Chai, T. Research on early fault warning system of coal mills based on the combination of thermodynamics and data mining. Trans. Inst. Meas. Control (Lond.) 2020, 42, 55–68. [Google Scholar] [CrossRef]
- Omar, M.E.; Rima, A.S. New approximations for standard normal distribution function. Commun. Stat. Theor. Methods 2020, 49, 1357–1374. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Scope | Advantage | Disadvantage |
|---|---|---|---|
| ARIMA | Small sample Linear prediction | Less samples required Simple model | Not suitable for complex nonlinear forecasts |
| RF | Small or medium sample Non-linear prediction | Fast training Automatic feature selection | Poor robustness Many optimization parameters |
| KF | Small or medium sample Linear prediction | Dynamic modeling Good robustness | Not suitable for complex nonlinear forecasts |
| LSSVM | Small or medium sample Non-linear prediction | High accuracy predictions based on few samples | Model parameters affects prediction accuracy |
| LSTM | Large sample Complex nonlinear prediction | Strong nonlinear ability Processing large data sets | Model parameters affects prediction accuracy Many optimization parameters |
| Feature Vector | Category | Indexes |
|---|---|---|
| Vibration signals (9 dimensions) | Time domain | Root mean square, kurtosis, kurtosis index |
| Frequency domain | Mean square frequency, center of gravity frequency, frequency variance | |
| Time-frequency domain | The first three energy entropies of the IMF components obtained by the Improved Empirical Mode Decomposition (IEMD) |
| Feature Vector | Category | Indexes |
|---|---|---|
| Current signals (11 dimensions) | Time domain | Root mean square, kurtosis, kurtosis index |
| Frequency domain | Mean square frequency, centre of gravity frequency, frequency variance | |
| Time-frequency domain | The five sample entropies obtained by the four-layer decomposition of the Dual-tree Complex Wavelet Transform (DTCWT) |
| Method | Data Set | RMSE | MAPE (%) | R2 |
|---|---|---|---|---|
| IAFSA_LSSVM | Training set | 0.0122 | 0.2966 | 0.9927 |
| Test set | 0.0477 | 1.1753 | 0.8103 | |
| AFSA_LSSVM | Training set | 0.0127 | 0.3069 | 0.9922 |
| Test set | 0.0488 | 1.2061 | 0.8012 | |
| PSO_LSSVM | Training set | 0.0146 | 0.3632 | 0.9896 |
| Test set | 0.0491 | 1.2182 | 0.7991 | |
| QGA_LSSVM | Training set | 0.0132 | 0.3219 | 0.9915 |
| Test set | 0.0508 | 1.2609 | 0.7845 | |
| GA_LSSVM | Training set | 0.0177 | 0.4602 | 0.9848 |
| Test set | 0.0492 | 1.2274 | 0.7985 | |
| GridSearch_LSSVM | Training set | 0.0139 | 0.3400 | 0.9905 |
| Test set | 0.0523 | 1.3019 | 0.7718 | |
| Combination prediction of Reference [30] | Training set | 0.0124 | 0.3016 | 0.9923 |
| Test set | 0.0479 | 1.1891 | 0.8089 |
| Method | Data Set | RMSE | MAPE (%) | R2 |
|---|---|---|---|---|
| IAFSA_LSSVM | Training set | 0.0018 | 0.1003 | 0.9982 |
| Test set | 0.0200 | 0.9082 | 0.8377 | |
| AFSA_LSSVM | Training set | 0.0027 | 0.1445 | 0.9960 |
| Test set | 0.0213 | 0.9736 | 0.8163 | |
| PSO_LSSVM | Training set | 0.0031 | 0.1601 | 0.9949 |
| Test set | 0.0206 | 0.9601 | 0.8270 | |
| QGA_LSSVM | Training set | 0.0022 | 0.1168 | 0.9975 |
| Test set | 0.0212 | 0.9696 | 0.8176 | |
| GA_LSSVM | Training set | 0.0029 | 0.1541 | 0.9954 |
| Test set | 0.0221 | 1.0256 | 0.8013 | |
| GridSearch_LSSVM | Training set | 0.0019 | 0.1043 | 0.9981 |
| Test set | 0.0214 | 0.9757 | 0.8130 | |
| Combination prediction of Reference [30] | Training set | 0.0025 | 0.1384 | 0.9964 |
| Test set | 0.0204 | 0.9542 | 0.8306 |
| Kurtosis Index | Average | Standard Deviation | Upper Warning Limit |
|---|---|---|---|
| Vibration signals | 2.9385 | 0.1542 | 3.4011 |
| Current signals | 1.4872 | 0.0622 | 1.6738 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hua, Z.; Xiao, Y.; Cao, J. Misalignment Fault Prediction of Wind Turbines Based on Improved Artificial Fish Swarm Algorithm. Entropy 2021, 23, 692. https://doi.org/10.3390/e23060692
Hua Z, Xiao Y, Cao J. Misalignment Fault Prediction of Wind Turbines Based on Improved Artificial Fish Swarm Algorithm. Entropy. 2021; 23(6):692. https://doi.org/10.3390/e23060692
Chicago/Turabian StyleHua, Zhe, Yancai Xiao, and Jiadong Cao. 2021. "Misalignment Fault Prediction of Wind Turbines Based on Improved Artificial Fish Swarm Algorithm" Entropy 23, no. 6: 692. https://doi.org/10.3390/e23060692