
3D Underwater Uncooperative Target Tracking for a Time-Varying Non-Gaussian Environment by Distributed Passive Underwater Buoys


Abstract
:1. Introduction
- By utilizing the CRLB and FIM analysis method along with the nonlinear observability analysis techniques, a real-time optimal topology design method of the distributed passive underwater buoys is proposed to balance the estimation robustness and accuracy dynamically.
- An online noise estimator is proposed based on the Sage-Husa estimating technique to estimate the 1st order and 2nd order momentum of the time-varying noise dynamically.
- An intelligent tracking algorithm for a time-varying non-Gaussian environment is proposed, namely the adaptive particle filter (APF). The proposed algorithm guarantees the convergence of underwater target tracking accuracy.
2. Underwater Target Kinematics Model and Distributed Measurement Model
2.1. Kinematic Model of the Underwater Uncooperative Target
2.2. Measurement Model of the Distributed Passive Underwater Buoys
3. Topology Design for Distributed Passive Underwater Buoys
3.1. Accuracy Analysis Based on CRLB and FIM
3.2. Observability Analysis of the Nonlinear Tracking System
3.3. Objective Function for Optimal Topology Design of the Distributed Underwater Buoys System
4. Adaptive Tracking Algorithm for the Time-Varying Non-Gaussian Environment
4.1. Modified Sage-Husa Online Noise Estimator
4.2. Adaptive Particle Filter (APF) for Underwater Target Tracking
- 1.
- Initialization
- 2.
- Time update
- 3.
- Measurement noise online estimation
- 4.
- Weight calculation
- 5.
- Measurement Update
- 6.
- Resampling
- 7.
- Process noise online estimation
- 8.
- Time propagation
| Algorithm 1: 3D passive underwater target tracking algorithm for the time-varying non-Gaussian environment by distributed underwater buoys |
| 1. Optimal topology determination 1 Use every two out of three measurements from the buoys to form the observable measurements sets as , and ; 2 Calculate the accuracy index of every topology of the distributed buoys by Equation (14); 3 Calculate the robust index of every topology of the distributed buoys by Equation (18); 4 Use the results from step 1 and 2 to calculate the overall index by Equation (19); 5 With the preset index , determine the optimal topology of the distributed underwater buoys of tracking time by Equation (20). 2. Tracking the underwater uncooperative target by APF under the time-varying non-Gaussian environment 1 Based on the determined sets of measurements at tracking time , initialize the first step particles and the relative weights; 2 Particles are time-updated by Equation (37); 3 Online noise estimation by Equation (39); 4 New weights are calculated by Equation (45); 5 Resampling procedure are checked and performed by Equation (47) and resampling method introduced by ref. [31]; 6 Estimate the current process noise by Equation (48); 7 Time propagation to run the whole algorithm at tracking time . |
5. Simulations and Discussions
5.1. Simulation Scenario
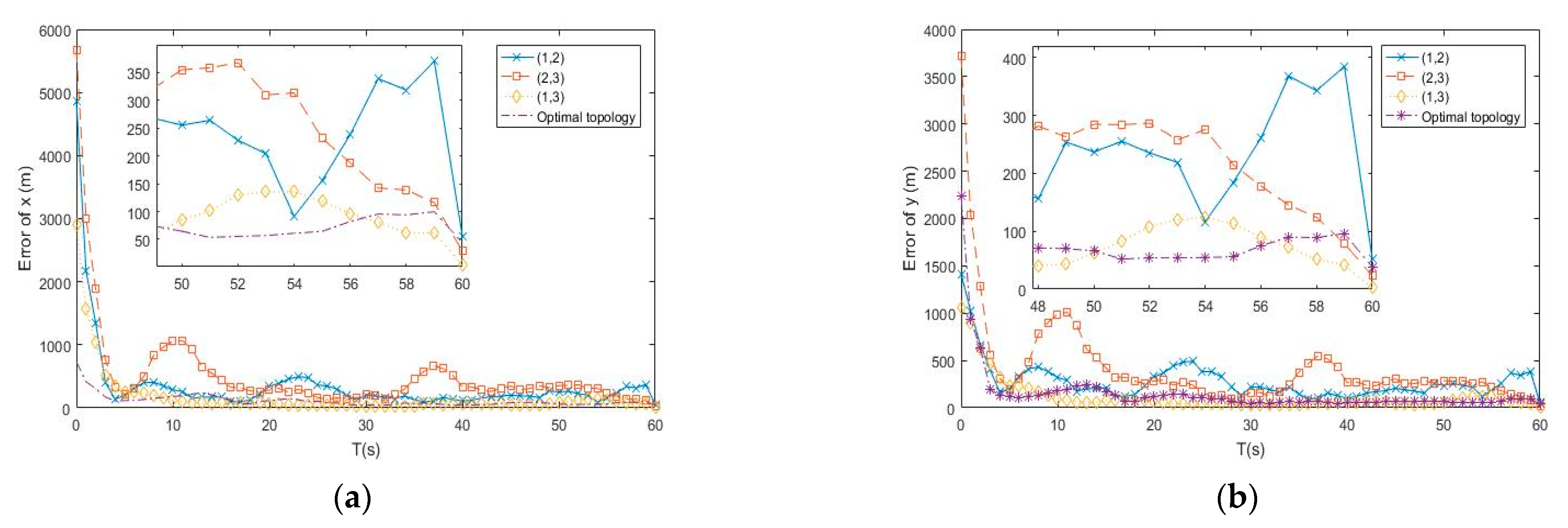
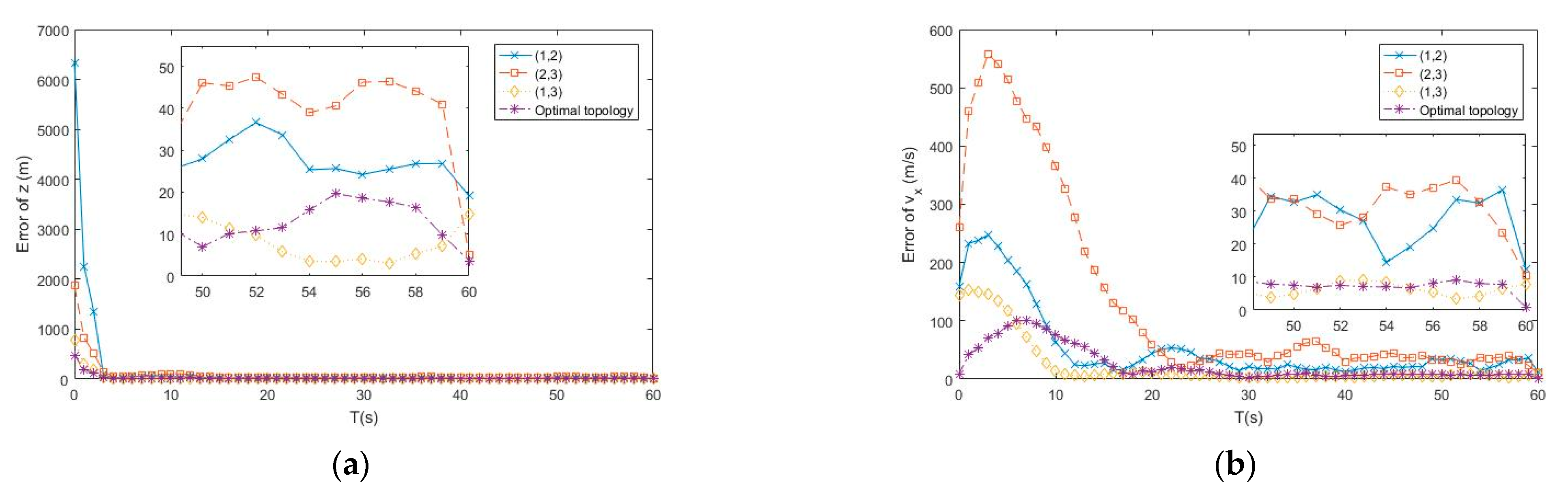
5.2. Optimal Topology Design Algorithm Verification
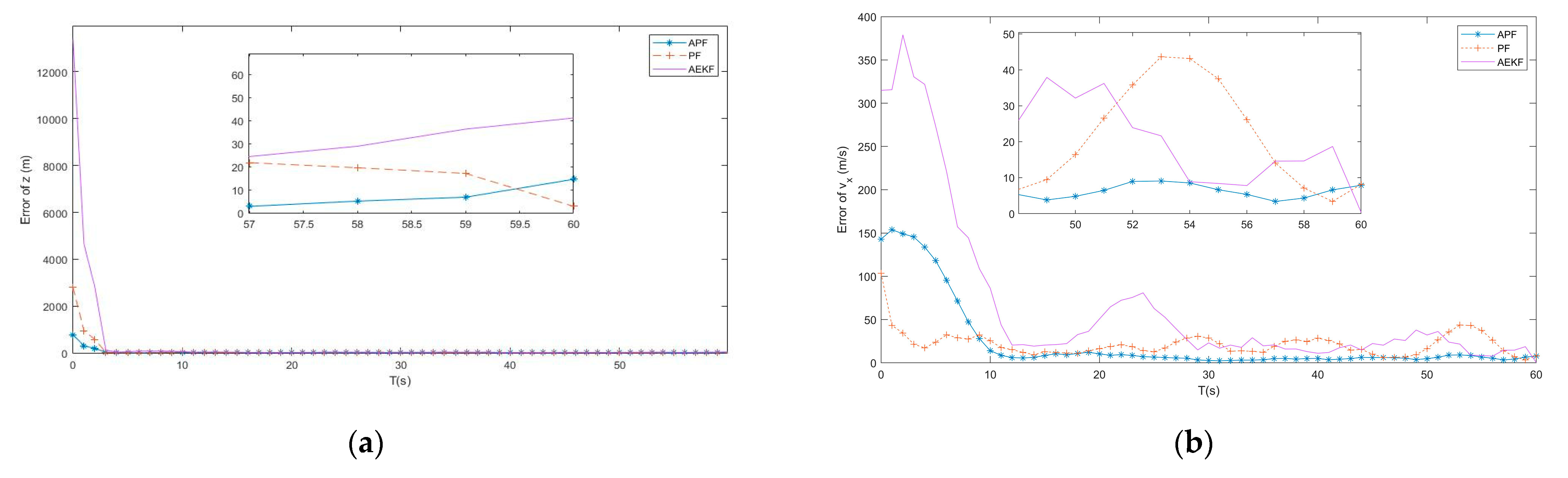
5.3. APF Verification
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mellema, G.L. Improved Active Sonar Tracking in Clutter Using Integrated Feature Data. IEEE J. Ocean. Eng. 2020, 45, 304–318. [Google Scholar] [CrossRef]
- Edelson, G.S. Two-stage active sonar network track-before-detect processing in a high clutter harbor environment. J. Acoust. Soc. Am. 2016, 140, 3349. [Google Scholar] [CrossRef]
- Silva, F.O.; Bozzi, F.; Monteiro, F.D. Automatic detection and tracking of contacts based in clusterization applied in passive sonar. J. Acoust. Soc. Am. 2019, 146, 3017. [Google Scholar] [CrossRef]
- Northardt, T. A Cramér-Rao Lower Bound Derivation for Passive Sonar Track-Before-Detect Algorithms. IEEE Trans. Inf. Theory 2020, 99, 1. [Google Scholar] [CrossRef]
- Yi, W.; Fu, L.; García-Fernández, N.L. Particle Filtering Based Track-before-detect Method for Passive Array Sonar Systems. Signal Process. 2019, 165, 303–314. [Google Scholar] [CrossRef]
- Yang, L.; Yang, Y.; Zhang, Y. Subspace-based direction of arrival estimation in colored ambient noise environments. Digit. Signal Process. 2019, 99, 102650. [Google Scholar] [CrossRef]
- Yang, L.; Yang, Y.; Liao, G. Sensor Localization for Highly Deformed Partially Calibrated Arrays with Moving Targets. IEEE Signal Process. Lett. 2019, 26, 1. [Google Scholar] [CrossRef]
- Su, J.; Li, Y.; Ali, W. Underwater 3D Doppler-Angle Target Tracking with Signal Time Delay. Sensors 2020, 20, 3869. [Google Scholar] [CrossRef]
- Northardt, T.; Nardone, S.C. Track-Before-Detect Bearings-Only Localization Performance in Complex Passive Sonar Scenarios: A Case Study. IEEE J. Ocean. Eng. 2019, 99, 1–10. [Google Scholar] [CrossRef]
- Rodrigues, C.V. Particles filter applied in the real-time bearings-only tracking problem of a sonar target. J. Acoust. Soc. Am. 2008, 123, 3335. [Google Scholar] [CrossRef]
- Qian, Z.; Song, T.L. Improved bearings-only target tracking with iterated Gaussian mixture measurements. IET Radar Sonar Navig. 2017, 11, 294–303. [Google Scholar]
- Feng, H.; Cai, Z. Target tracking based on improved cubature particle filter in underwater wireless sensor networks. IET Radar Sonar Navig. 2018, 13, 638–645. [Google Scholar] [CrossRef]
- Han, X.; Liu, M.; Zhang, S. A Multi-node Cooperative Bearing-only Target Passive Tracking Algorithm via UWSNs. IEEE Sens. J. 2019, 99, 1. [Google Scholar] [CrossRef]
- Zhang, Q.; Liu, M.; Zhang, S. Node Topology Effect on Target Tracking Based on UWSNs Using Quantized Measurements. IEEE Trans. Cybern. 2017, 45, 2323–2335. [Google Scholar] [CrossRef] [PubMed]
- Tsinias, J.; Kitsos, C. Observability and State Estimation for a Class of Nonlinear Systems. IEEE Trans. Autom. Control 2018, 99, 2621–2628. [Google Scholar] [CrossRef] [Green Version]
- Krishnamurthy, V. Convex Stochastic Dominance in Bayesian Localization, Filtering and Controlled Sensing POMDPs. IEEE Trans. Inf. Theory 2019, 66, 3187–3201. [Google Scholar] [CrossRef] [Green Version]
- Moran, B.; Suvorova, S.; Howard, S. Sensor Management for Radar: A Tutorial. In Advances in Sensing with Security Applications; Springer: Berlin/Heidelberg, Germany, 2006; pp. 269–291. [Google Scholar]
- Krishnamurthy, V. POMDPs in controlled sensing and sensor scheduling. In Partially Observed Markov Decision Processes: From Filtering to Controlled Sensing; Cambridge University Press: Cambridge, UK, 2016; pp. 179–200. [Google Scholar]
- Bar-Shalom, Y.; Li, X.R.; Kirubarajan, T. Estimation with Applications to Tracking and Navigation; Wiley-Interscience: Hoboken, NJ, USA, 2008. [Google Scholar]
- Maity, A.; Padhi, R. Robust control design of an air-breathing engine for a supersonic vehicle using backstepping and UKF. Asian J. Control 2017, 19, 1710–1721. [Google Scholar]
- Leong, P.H.; Arulampalam, S.; Lamahewa, T.A. A Gaussian-Sum Based Cubature Kalman Filter for Bearings-Only Tracking. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 1161–1176. [Google Scholar] [CrossRef]
- Bordonaro, S.V.; Willett, P.; Bar-Shalom, Y. Converted Measurement Sigma Point Kalman Filter for Bistatic Sonar and Radar Tracking. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 147–159. [Google Scholar] [CrossRef]
- Feng, H.; Cai, Z. Target tracking based on improved square root cubature particle filter via underwater wireless sensor networks. Commun. IET. 2019, 13, 1008–1015. [Google Scholar] [CrossRef]
- Zhang, Y.; Gao, L. Sensor-Networked Underwater Target Tracking Based on Grubbs Criterion and Improved Particle Filter Algorithm. IEEE Access 2019, 99, 1. [Google Scholar] [CrossRef]
- Chaves-Jiménez, A.J.; Guo, G.E. Impact of atmospheric coupling between orbit and attitude in relative dynamics observability. J. Guid. Control Dyn. 2017, 40, 3273–3280. [Google Scholar] [CrossRef]
- Jianjun, G.; Dongbing, G.; Sen, W. A review of visual inertial odometry from filtering and optimisation perspectives. Adv. Robot. Int. J. Robot. Soc. Jpn. 2015, 29, 1289–1301. [Google Scholar]
- Sarkka, S.; Solin, A.; Hartikainen, J. Spatiotemporal Learning via Infinite-Dimensional Bayesian Filtering and Smoothing: A Look at Gaussian Process Regression Through Kalman Filtering. Signal Process. Mag. 2013, 30, 51–61. [Google Scholar] [CrossRef]
- Huang, Y.; Zhang, Y.; Wu, Z. A Novel Adaptive Kalman Filter with Inaccurate Process and Measurement Noise Covariance Matrices. IEEE Trans. Autom. Control 2018, 63, 594–601. [Google Scholar] [CrossRef] [Green Version]
- Husa, G.W. Adaptive filtering with unknown prior statistics. In Proceedings of the Joint Automatic Control Conference, Boulder, CO, USA, 5–7 August 1969. [Google Scholar]
- Xu, S.; Zhou, H.; Wang, J. SINS/CNS/GNSS Integrated Navigation Based on an Improved Federated Sage–Husa Adaptive Filter. Sensors 2019, 19, 3812. [Google Scholar] [CrossRef] [Green Version]
- Ma, C.; Zheng, Z.; Chen, J. Jet transport particle filter for attitude estimation of tumbling space objects. Aerosp. Sci. Technol. 2020, 107, 106330. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Buoy Number | Coordinate |
|---|---|
| 1 | |
| 2 | |
| 3 |
| 79.1 | 18.41 | |
| 52.28 | 10.53 | |
| 36.97 | 12.48 | |
| Optimal topology | 15.48 | 1.52 |
| APF | 15.48 | 1.52 |
| PF | 211.5 | 9.18 |
| AEKF | 230.5 | 13.31 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hou, X.; Zhou, J.; Yang, Y.; Yang, L.; Qiao, G. 3D Underwater Uncooperative Target Tracking for a Time-Varying Non-Gaussian Environment by Distributed Passive Underwater Buoys. Entropy 2021, 23, 902. https://doi.org/10.3390/e23070902
Hou X, Zhou J, Yang Y, Yang L, Qiao G. 3D Underwater Uncooperative Target Tracking for a Time-Varying Non-Gaussian Environment by Distributed Passive Underwater Buoys. Entropy. 2021; 23(7):902. https://doi.org/10.3390/e23070902
Chicago/Turabian StyleHou, Xianghao, Jianbo Zhou, Yixin Yang, Long Yang, and Gang Qiao. 2021. "3D Underwater Uncooperative Target Tracking for a Time-Varying Non-Gaussian Environment by Distributed Passive Underwater Buoys" Entropy 23, no. 7: 902. https://doi.org/10.3390/e23070902