
C-GCN: A Flexible CSI Phase Feature Extraction Network for Error Suppression in Indoor Positioning


Abstract
:1. Introduction
- 1
- To the best of our knowledge, this is the first work to apply the graph convolution in CSI based indoor positioning. We elaborate on how to connect the data with the correlation between phases, and optimize the parameters with the constraints of the loss function to obtain new features that are effective for position estimation. This paper presents the feasibility of position estimation based on the irregular correlation in CSI.
- 2
- Affected by random noise, the fingerprint fluctuation of a single location point is extracted from the data packet with natural corresponding data structure by Euclidean space convolution. This kind of time correlation only exists between nodes with the same subcarrier sequence number, which effectively reduces the impact of random noise during position estimation.
- 3
- Extensive experiments are conducted in typical indoor environments to verify the superior performance of C-GCN in restraining error tailing. Besides, we also introduce amplitude features to further verify the feasibility of bi-modal positioning based on the new feature generated by C-GCN.
2. Preliminary
3. System Design
3.1. Design Challenges
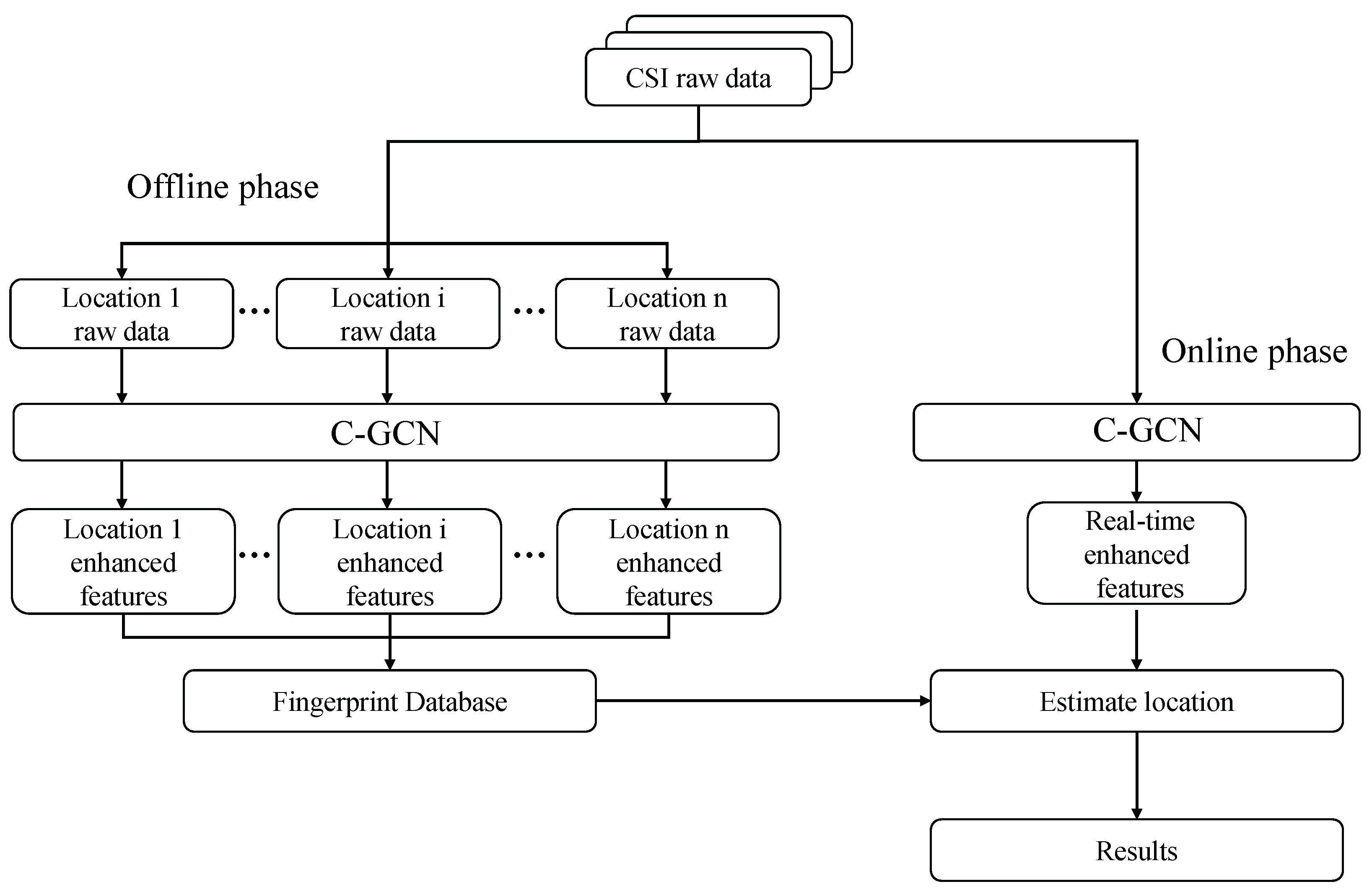
3.2. System Architecture
4. Methodolgy
4.1. Graph Convolution Layer in Non-Euclidean Space
4.1.1. Graph Convolution Strategy
4.1.2. Aggregate Feature Vector of Nodes
4.1.3. Aggregate All Nodes into Graph
4.2. Convolution Layer in Euclidean Space
4.3. Network Optimization
5. Evaluation
5.1. Experiment Methodology
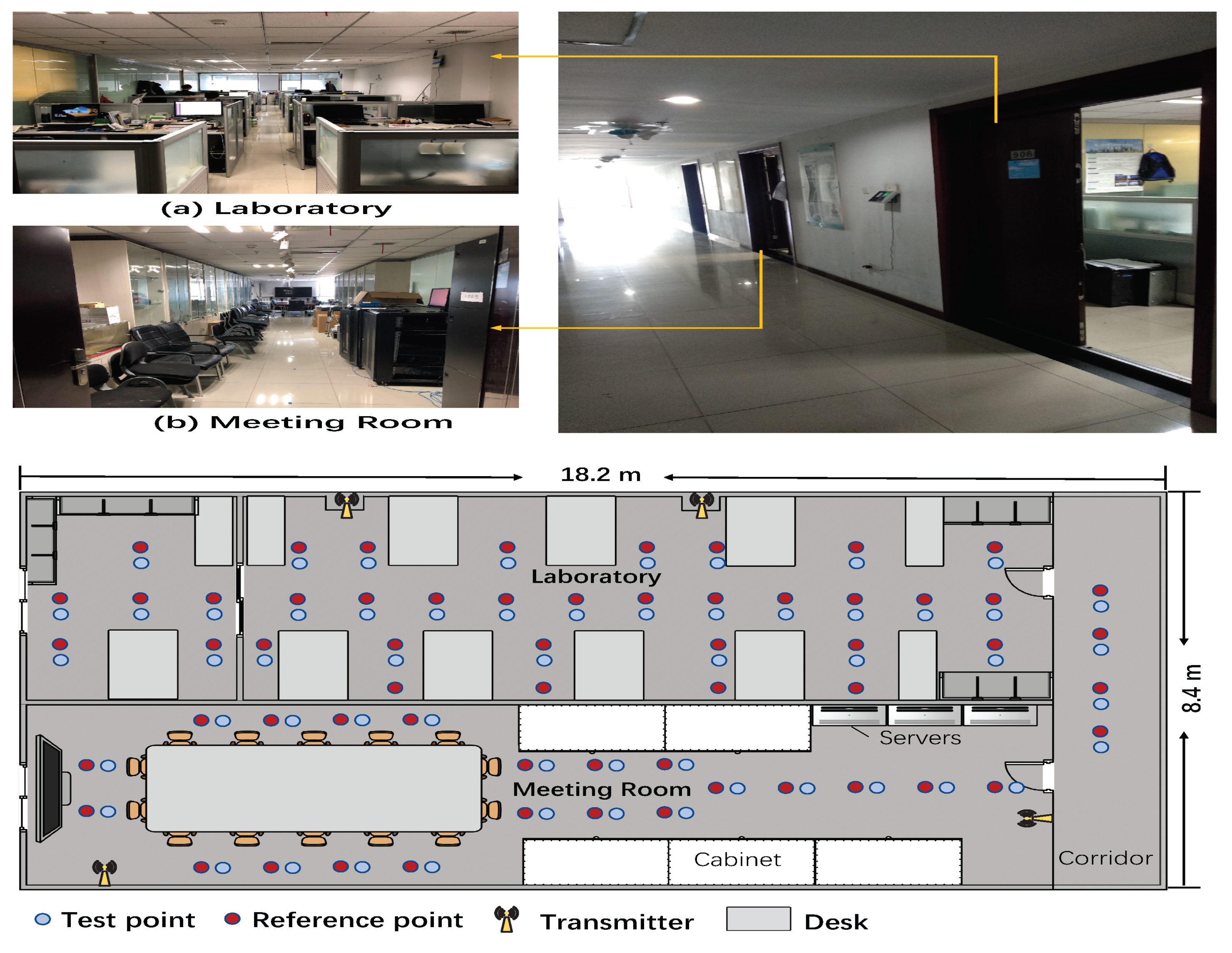
5.1.1. Comprehensive Office
5.1.2. Garage
5.1.3. Benchmarks
5.2. Positioning Accuracy
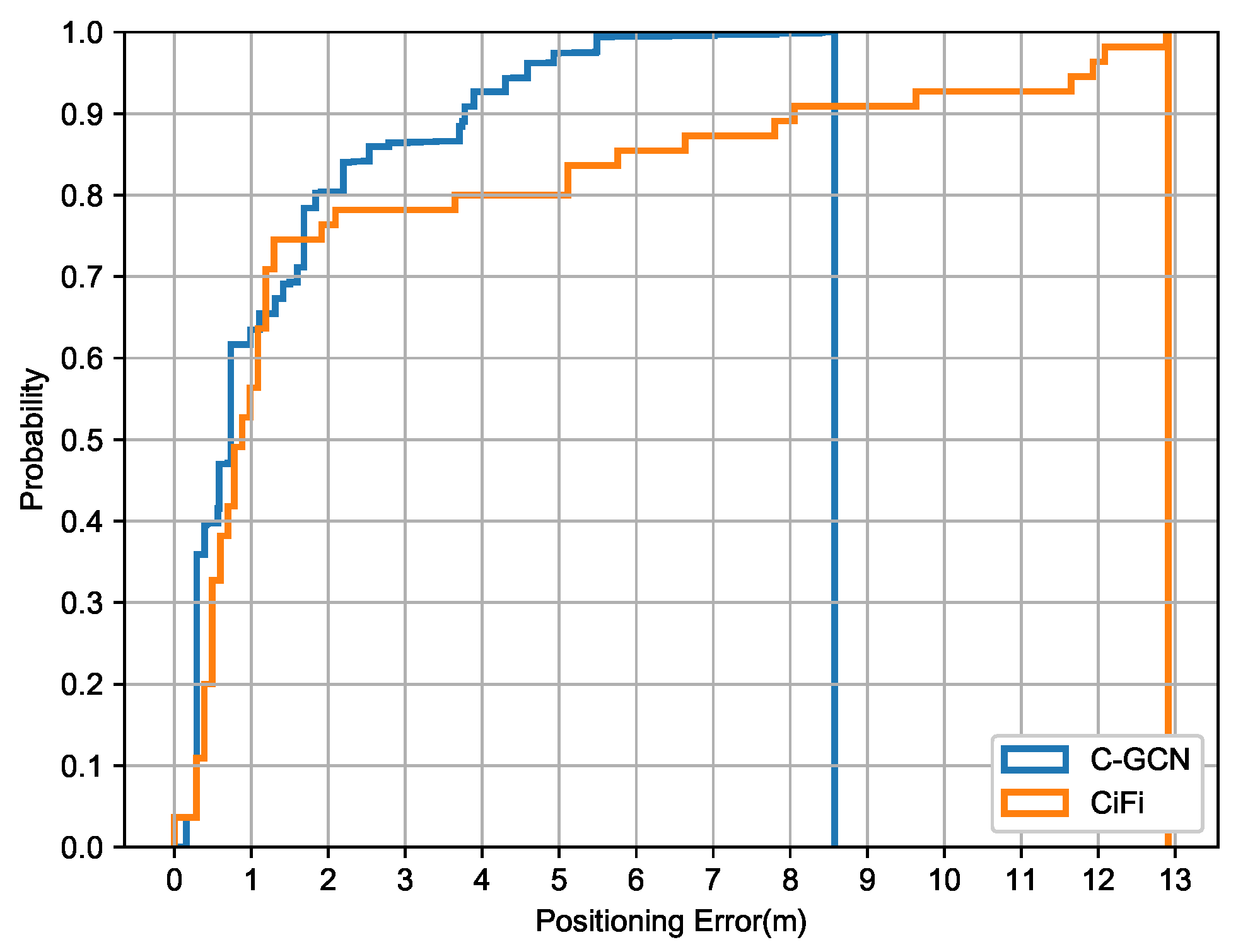
5.2.1. Single-Modal Estimation
5.2.2. Bi-Modal Estimation
5.3. Positioning Stability
5.3.1. Single-Modal Estimation
5.3.2. Bi-Modal Estimation
6. Summary
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Guo, X.; Li, L.; Ansari, N.; Liao, B. Accurate WiFi localization by fusing a group of fingerprints via a global fusion profile. IEEE Trans. Veh. Technol. 2018, 67, 7314–7325. [Google Scholar] [CrossRef]
- Bahl, P.; Venkata, N.P. RADAR: An in-building RF-based user location and tracking system. In Proceedings of the IEEE INFOCOM 2000. Conference on Computer Communications. Nineteenth Annual Joint Conference of the IEEE Computer and Communications Societies (Cat. No. 00CH37064), Tel Aviv, Israel, 26–30 March 2000; Volume 2. [Google Scholar]
- Topak, F.; Pekeriçli, M.K.; Tanyer, A.M. Technological viability assessment of Bluetooth low energy technology for indoor localization. J. Comput. Civ. Eng. 2018, 32, 04018034. [Google Scholar] [CrossRef]
- Iqbal, Z.; Luo, D.; Henry, P.; Kazemifar, S.; Rozario, T.; Yan, Y.; Jiang, S. Accurate real time localization tracking in a clinical environment using Bluetooth Low Energy and deep learning. PLoS ONE 2018, 13, e0205392. [Google Scholar] [CrossRef] [Green Version]
- Huang, W.; Ding, C.; Wang, S. A comprehensive method to combine RFID indoor targets positioning with real geographic environment. Comput. Sci. Inf. Syst. 2015, 12, 1149–1169. [Google Scholar]
- Guo, K.; Qiu, Z.; Miao, C.; Zaini, A.H.; Chen, C.L.; Meng, W.; Xie, L. Ultra-wideband-based localization for quadcopter navigation. Unmanned Syst. 2016, 4, 23–34. [Google Scholar] [CrossRef]
- Zhang, L.Y.; Yang, G. Ultra-wide-band based indoor positioning technologies. J. Data Acquis. Process. 2013, 28, 706–713. [Google Scholar]
- Cidronali, A.; Maddio, S.; Giorgetti, G.; Manes, G. Analysis and performance of a smart antenna for 2.45-GHz single-anchor indoor positioning. IEEE Trans. Microw. Theory Tech. 2009, 58, 21–31. [Google Scholar] [CrossRef]
- Wang, Y.; Ma, S.; Chen, C.P. TOA-based passive localization in quasi-synchronous networks. IEEE Commun. Lett. 2014, 18, 592–595. [Google Scholar] [CrossRef]
- Jaffe, A.; Mati, W. Single-site localization via maximum discrimination multipath fingerprinting. IEEE Trans. Signal Process. 2014, 62, 1718–1728. [Google Scholar] [CrossRef]
- Chen, C.; Han, Y.; Chen, Y.; Liu, K.R. Indoor Global Positioning System with Centimeter Accuracy Using Wi-Fi [Applications Corner]. IEEE Signal Process. Mag. 2016, 33.6, 128–134. [Google Scholar] [CrossRef]
- Halperin, D.; Hu, W.; Sheth, A.; Wetherall, D. Predictable 802.11 packet delivery from wireless channel measurements. ACM Sigcomm. Comput. Commun. Rev. 2010, 40, 159–170. [Google Scholar] [CrossRef]
- Wang, X.; Wang, X.; Mao, S. Deep Convolutional Neural Networks for Indoor Localization with CSI Images. IEEE Trans. Netw. Sci. Eng. 2020, 7, 316–327. [Google Scholar] [CrossRef]
- Zhuo, Y.; Zhu, H.; Xue, H. Identifying a new non-linear CSI phase measurement error with commodity WiFi devices. In Proceedings of the 2016 IEEE 22nd International Conference on Parallel and Distributed Systems (ICPADS), Wuhan, China, 13–16 December 2016. [Google Scholar]
- Kotaru, M.; Katti, S. Position tracking for virtual reality using commodity WiFi. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Zhuo, Y.; Zhu, H.; Xue, H.; Chang, S. Perceiving accurate CSI phases with commodity WiFi devices. In Proceedings of the IEEE INFOCOM 2017-IEEE Conference on Computer Communications, Atlanta, GA, USA, 1–4 May 2017. [Google Scholar]
- Wang, X.; Gao, L.; Mao, S. BiLoc: Bi-modal deep learning for indoor localization with commodity 5GHz WiFi. IEEE Access 2017, 5, 4209–4220. [Google Scholar] [CrossRef]
- Wang, X.; Gao, L.; Mao, S.; Pandey, S. CSI-based fingerprinting for indoor localization: A deep learning approach. IEEE Trans. Veh. Technol. 2016, 66, 763–776. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Gao, L.; Mao, S. CFi: C Fingerprinting for Indoor Localization with a Deep Learning Approach. In Proceedings of the IEEE GLOBECOM 2015, San Diego, CA, USA, 6–10 December 2015. [Google Scholar]
- Hsieh, C.H.; Chen, J.Y.; Nien, B.H. Deep learning-based indoor localization using received signal strength and channel state information. IEEE Access 2019, 7, 33256–33267. [Google Scholar] [CrossRef]
- Wang, X.; Wang, X.; Mao, S. ResLoc: Deep residual sharing learning for indoor localization with CSI tensors. In Proceedings of the2017 IEEE 28th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), Montreal, QC, Canada, 8–13 October 2017. [Google Scholar]
- Berg, R.V.D.; Kipf, T.N.; Welling, M. Graph convolutional matrix completion. arXiv 2017, arXiv:1706.02263. [Google Scholar]
- Fang, S.H.; Chang, W.H.; Tsao, Y.; Shih, H.C.; Wang, C. Channel State Reconstruction Using Multilevel Discrete Wavelet Transform for Improved Fingerprinting-Based Indoor Localization. IEEE Sens. J. 2016, 16, 7784–7791. [Google Scholar] [CrossRef]
- Szegedy, C.; Liu, W.; Jia, Y.; Sermanet, P.; Reed, S.; Anguelov, D.; Rabinovich, A. Going deeper with convolutions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 1–9. [Google Scholar]
- Monti, F.; Bronstein, M.M.; Bresson, X. Geometric matrix completion with recurrent multi-graph neural networks. Advances in Neural Information Processing Systems. arXiv 2017, arXiv:1704.06803. [Google Scholar]
- Ying, R.; He, R.; Chen, K.; Eksombatchai, P.; Hamilton, W.L.; Leskovec, J. Graph convolutional neural networks for web-scale recommender systems. In Proceedings of the 24th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, London, UK, 19–23 August 2018. [Google Scholar]
- Defferrard, M.; Bresson, X.; Vandergheynst, P. Convolutional neural networks on graphs with fast localized spectral filtering. Adv. Neural Inf. Process. Syst. 2016, 29, 3844–3852. [Google Scholar]
- Gilmer, J.; Schoenholz, S.S.; Riley, P.F.; Vinyals, O.; Dahl, G.E. Neural message passing for quantum chemistry. In Proceedings of the 34th International Conference on Machine Learning-Volume 70, JMLR.org, Sydney, Australia, 6–11 August 2017. [Google Scholar]
- Kipf, T.N.; Welling, M. Semi-supervised classification with graph convolutional networks. arXiv 2016, arXiv:1609.02907. [Google Scholar]
- Veličković, P.; Cucurull, G.; Casanova, A.; Romero, A.; Lio, P.; Bengio, Y. Graph attention networks. arXiv 2017, arXiv:1710.10903. [Google Scholar]
- Bruna, J.; Zaremba, W.; Szlam, A.; LeCun, Y. Spectral networks and locally connected networks on graphs. arXiv 2013, arXiv:1312.6203. [Google Scholar]
- Sanam, T.F.; Godrich, H. A multi-view discriminant learning approach for indoor localization using amplitude and phase features of CSI. IEEE Access 2020, 8, 59947–59959. [Google Scholar] [CrossRef]
- Henaff, M.; Bruna, J.; LeCun, Y. Deep convolutional networks on graph-structured data. arXiv 2015, arXiv:1506.05163. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name | Parameter Value |
|---|---|
| batch-size | 10 |
| patience | 20 |
| Learning-rate | 0.0005 |
| loss function | cross-entropy loss |
| initializer | Glorot initializer |
| C-GCN | CiFi | |
|---|---|---|
| Mean error (m) | 1.29 | 2.42 |
| Standard deviation (m) | 1.42 | 3.47 |
| Minimum error (m) | 0.02 | 0 |
| Q1 (m) | 0.12 | 0.92 |
| Q2 (m) | 0.94 | 1.12 |
| Q3 (m) | 1.91 | 2.11 |
| Maximum error (m) | 8.72 | 12.93 |
| C-GCN | CiFi | |
|---|---|---|
| Mean error (m) | 1.71 | 2.28 |
| Standard deviation (m) | 2.21 | 2.64 |
| Minimum error (m) | 0.02 | 0 |
| Q1 (m) | 0.96 | 0.97 |
| Q2 (m) | 0.99 | 1.12 |
| Q3 (m) | 1.85 | 1.93 |
| Maximum error (m) | 9.89 | 13.56 |
| MAP-GCN | BiLoc | CiFi | |
|---|---|---|---|
| Mean error (m) | 0.99 | 1.5 | 2.42 |
| Standard deviation (m) | 1.51 | 1.22 | 3.47 |
| Minimum error (m) | 0.01 | 0 | 0.47 |
| Q1 (m) | 0.35 | 1.39 | 0.34 |
| Q2 (m) | 0.44 | 1.84 | 0.46 |
| Q3 (m) | 1.42 | 3.12 | 1.56 |
| Maximum error (m) | 9.99 | 10.02 | 13.56 |
| MAP-GCN | BiLoc | CiFi | |
|---|---|---|---|
| Mean error (m) | 1.14 | 2.07 | 2.28 |
| Standard deviation (m) | 1.69 | 1.51 | 2.64 |
| Minimum error (m) | 0 | 0 | 0 |
| Q1 (m) | 0.31 | 0.46 | 0.32 |
| Q2 (m) | 0.32 | 1.28 | 0.67 |
| Q3 (m) | 1.12 | 2.01 | 1.88 |
| Maximum error (m) | 9.03 | 9.35 | 12.93 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, W.; Cheng, Q.; Deng, Z.; Jia, M. C-GCN: A Flexible CSI Phase Feature Extraction Network for Error Suppression in Indoor Positioning. Entropy 2021, 23, 1004. https://doi.org/10.3390/e23081004
Liu W, Cheng Q, Deng Z, Jia M. C-GCN: A Flexible CSI Phase Feature Extraction Network for Error Suppression in Indoor Positioning. Entropy. 2021; 23(8):1004. https://doi.org/10.3390/e23081004
Chicago/Turabian StyleLiu, Wen, Qianqian Cheng, Zhongliang Deng, and Mingjie Jia. 2021. "C-GCN: A Flexible CSI Phase Feature Extraction Network for Error Suppression in Indoor Positioning" Entropy 23, no. 8: 1004. https://doi.org/10.3390/e23081004
APA StyleLiu, W., Cheng, Q., Deng, Z., & Jia, M. (2021). C-GCN: A Flexible CSI Phase Feature Extraction Network for Error Suppression in Indoor Positioning. Entropy, 23(8), 1004. https://doi.org/10.3390/e23081004