
Blind Additive Gaussian White Noise Level Estimation from a Single Image by Employing Chi-Square Distribution †




Abstract
:1. Introduction
- 1.
- A novel patch-based noise level estimation method based on Chi-square distribution is proposed.
- 2.
- An optimization iteration scheme is proposed to improve the accuracy and stability of the noise level estimation strategy.
- 3.
- Quantitative results associated with the qualitative results of the experiments are used to verify the effectiveness of the proposed noise level strategy.

2. Literature Review
- Filter-based methods: These methods extract the differential image by convolving the noisy image with a specially designed filter, and then use the filtered differential image as the noise map to estimate the noise level [8,9]. For example, Immerkaer [10] designed an image structure insensitive method to filter noisy images and estimate noise level by averaging the convolved images. It performed well on estimating noise levels, but lost in structural images [11]. To address this issue, Rank et al. [12] combined histogram statistics with a filter-based approach to generate the stable noise level. However, it produced an overestimation noise level from texture images [13]. To reduce the adverse effects caused by the image structures, Tai et al. [14,15] applied a Laplacian operator to remove strong edge pixels before filtering so as to improve the accuracy at low noise levels.
- Transform-based methods: Instead of using spatial information, these methods estimate noise level by transforming an image into other spaces [16,17]. For example, Donoho [18] proposed a mean absolute deviation (MAD) method to estimate the noise level on the wavelet domain. They treated all the coefficients of the highest frequency subband as noise, and estimated the standard deviation. This method performed well on estimating high noise level, but the error is increased when noise level is low [19,20]. Recently, the models based on the singular value decomposition (SVD) were widely used in noise level estimation [21,22]. For example, Wei et al. [23] used singular value tail data in SVD to estimate the noise level, which minimizes the interference of image structures. However, image details and noise cannot be completely separated at the end of the singular value for images with rich structures, so the noise level is invariably overestimated [24].
- Patch-based methods: In these methods, a noisy image is initially decomposed into a group of patches. Then, the homogeneous patches are selected via various statistical techniques for noise level estimation [25,26,27]. For example, Pyatykh et al. [28] proposed a method based on principal component analysis (PCA), which viewed the smallest eigenvalue of the image patch covariance matrix as the noise level. Since the minimum eigenvalue of PCA about the noisy image patch does not always satisfy the null hypothesis, it is easy to cause instability or overestimation of the noise level estimation [29,30,31]. In order to optimize the above methods, Liu et al. [32] proposed an automatic noise level estimation method by adaptively selecting effective image patches for covariance calculation. It effectively reduces the obvious overestimation of the low noise level based on the PCA method, but there is still underestimation in the case of high noise level [33].
3. Image Noise Level Estimation Based on Chi-Square Distribution
3.1. Image Decomposition into Patches
3.2. Flat Patches Selection
3.3. Image Noise Level Estimation
3.4. Noise Level Estimation Optimization
| Algorithm 1 Noise level estimation optimization. |
|
4. Experimental Results and Discussions
4.1. Feasibility Study on Test Flat Images
4.2. Analysis of the Flat Patch Selection
4.3. Discussion of the Iterative Model
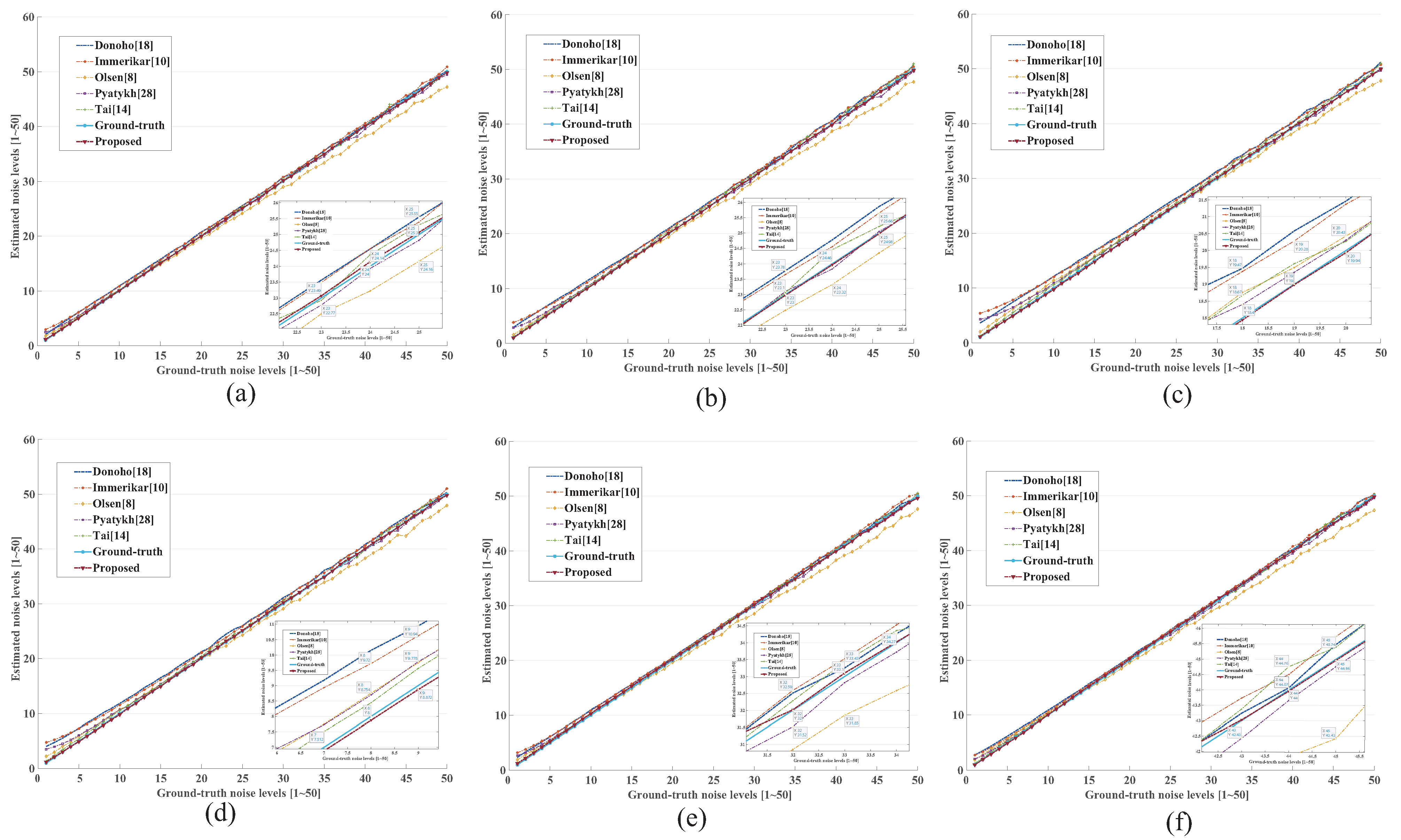
4.4. Comparisons of Experiments on Synthetic Images
4.5. Combined with BM3D on Synthetic Images
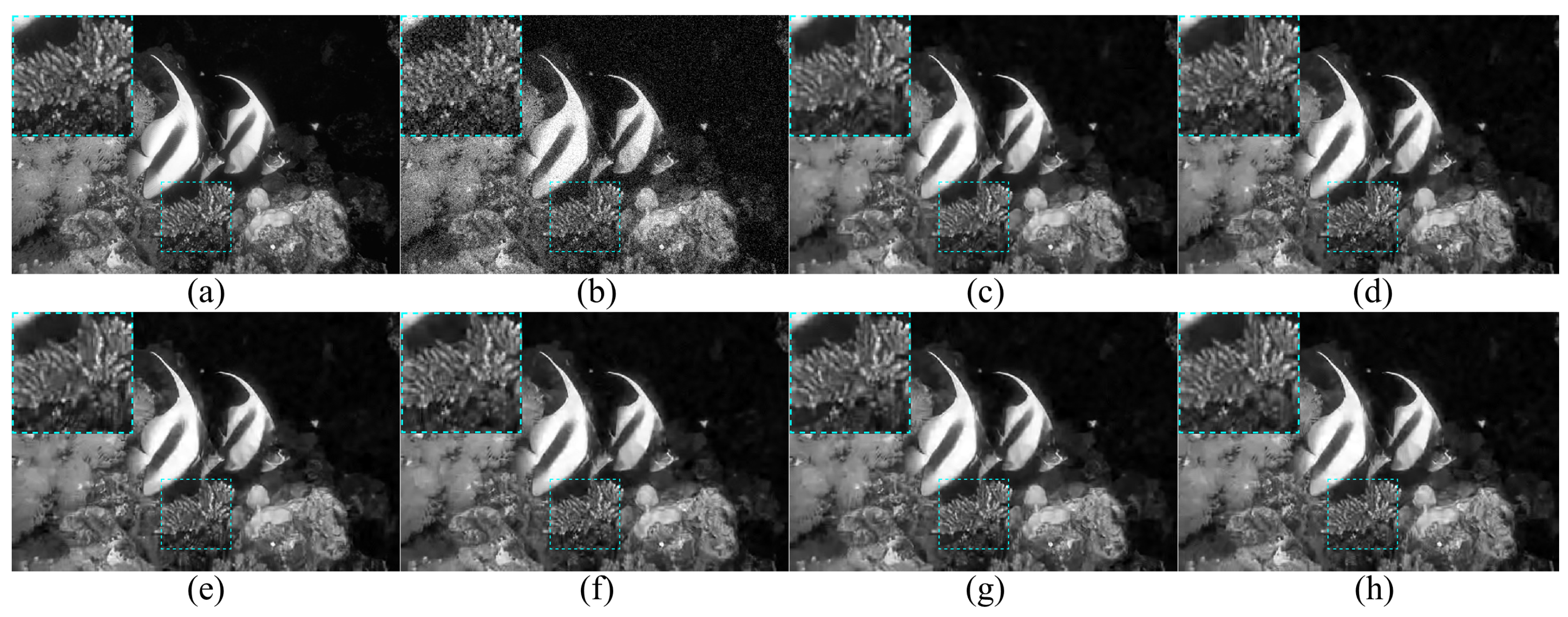
4.6. Combined with BM3D on Real-World Images
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Das, P.; Pal, C.; Chakrabarti, A.; Acharyya, A.; Basu, S. Adaptive denoising of 3d volumetric mr images using local variance based estimator. Biomed. Signal Process. Control. 2020, 59, 101901. [Google Scholar] [CrossRef]
- Yang, X.; Tan, L.; He, L. A robust least squares support vector machine for regression and classification with noise. Neurocomputing 2014, 140, 41–52. [Google Scholar] [CrossRef]
- Huang, Z.; Li, Q.; Zhang, T.; Sang, N.; Hong, H. Iterative weighted sparse representation for x-ray cardiovascular angiogram image denoising over learned dictionary. IET Image Process. 2018, 12, 254–261. [Google Scholar] [CrossRef]
- Kokil, P.; Pratap, T. Additive white gaussian noise level estimation for natural images using linear scale-space features. Circuits Syst. Signal Process. 2021, 40, 353–374. [Google Scholar] [CrossRef]
- Huang, Z.; Zhang, Y.; Li, Q.; Li, Z.; Zhang, T.; Sang, N.; Xiong, S. Unidirectional variation and deep cnn denoiser priors for simultaneously destriping and denoising optical remote sensing image. Int. J. Remote Sens. 2019, 40, 5737–5748. [Google Scholar] [CrossRef]
- Lin, C.; Ye, Y.; Feng, S.; Huang, M. A noise level estimation method of impulse noise image based on local similarity. Multimed. Tools Appl. 2022, 81, 15947–15960. [Google Scholar] [CrossRef]
- Rakhshanfar, M.; Amer, M. Estimation of Gaussian, Poissonian–Gaussian, and processed visual noise and its level function. IEEE Trans. Image Process. 2016, 25, 4172–4185. [Google Scholar] [CrossRef]
- Olsen, S.I. Estimation of noise in images: An evaluation. CVGIP Graph. Model. Image Process. 1993, 55, 319–323. [Google Scholar] [CrossRef]
- Khmag, A.; Al, H.S.A.R.; Ramlee, R.A.; Kamarudin, N.; Malallah, F.L. Natural image noise removal using nonlocal means and hidden markov models in transform domain. Vis. Comput. 2018, 34, 1661–1675. [Google Scholar] [CrossRef]
- Immerkaer, J. Fast noise variance estimation. Comput. Vis. Image Underst. 1996, 64, 300–302. [Google Scholar] [CrossRef]
- Zhang, X.; Xiong, Y. Impulse noise removal using directional difference based noise detector and adaptive weighted mean filter. IEEE Signal Process. Lett. 2009, 16, 295–298. [Google Scholar] [CrossRef]
- Rank, K.; Lendl, M.; Unbehauen, R. Estimation of image noise variance. IEE Proc.-Vision Image Signal Process. 1999, 146, 80–84. [Google Scholar] [CrossRef]
- Dong, L.; Zhou, J.; Tang, Y.Y. Noise level estimation for natural images based on scale-invariant kurtosis and piecewise stationarity. IEEE Trans. Image Process. 2016, 26, 1017–1030. [Google Scholar] [CrossRef]
- Tai, S.C.; Yang, S.M. A fast method for image noise estimation using laplacian operator and adaptive edge detection. In Proceedings of the 2008 3rd International Symposium on Communications, Control and Signal Processing, St Julians, Malta, 12–14 March 2008; pp. 1077–1081. [Google Scholar]
- Yang, S.M.; Tai, S.C. Fast and reliable image-noise estimation using a hybrid approach. J. Electron. Imaging 2010, 19, 033007. [Google Scholar] [CrossRef]
- Tang, C.; Yang, X.; Zhai, G. Dual-transform based noise estimation. In Proceedings of the 2012 IEEE International Conference on Multimedia and Expo, Melbourne, VIC, Australia, 9–13 July 2012; pp. 991–996. [Google Scholar]
- Jiang, P.; Wang, Q.; Wu, J. Efficient noise-level estimation based on principal image texture. IEEE Trans. Circuits Syst. Video Technol. 2019, 30, 1987–1999. [Google Scholar] [CrossRef]
- Donoho, D.L. De-noising by soft-thresholding. IEEE Trans. Inf. Theory 1995, 41, 613–627. [Google Scholar] [CrossRef] [Green Version]
- Stefano, A.D.; White, P.R.; Collis, W.B. Training methods for image noise level estimation on wavelet components. EURASIP J. Adv. Signal Process. 2004, 2004, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Ugweje, O.C. Selective noise filtration of image signals using wavelet transform. Measurement 2004, 36, 279–287. [Google Scholar] [CrossRef]
- Liu, W. Additive white gaussian noise level estimation based on block svd. In Proceedings of the 2014 IEEE Workshop on Electronics, Computer and Applications, Ottawa, ON, Canada, 8–9 May 2014; pp. 960–963. [Google Scholar]
- Khmag, A.; Malallah, F.L.; Sharef, B.T. Additive noise level estimation based on singular value decomposition (svd) in natural digital images. In Proceedings of the 2019 IEEE International Conference on Signal and Image Processing Applications (ICSIPA), Kuala Lumpur, Malaysia, 17–19 September 2019; pp. 225–230. [Google Scholar]
- Liu, W.; Lin, W. Additive white gaussian noise level estimation in svd domain for images. IEEE Trans. Image Process. 2012, 22, 872–883. [Google Scholar] [CrossRef]
- Yang, J.; Gan, Z.; Wu, Z.; Hou, C. Estimation of signal-dependent noise level function in transform domain via a sparse recovery model. IEEE Trans. Image Process. Iss 2015, 24, 1561–1572. [Google Scholar] [CrossRef]
- Huang, Z.; Wang, Z.; Zhu, Z.; Zhang, Y.; Fang, H.; Shi, Y.; Zhang, T. DLRP: Learning deep low-rank prior for remotely sensed image denoising. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Fu, P.; Li, C.; Cai, W.; Sun, Q. A spatially cohesive superpixel model for image noise level estimation. Neurocomputing 2017, 266, 420–432. [Google Scholar] [CrossRef]
- Shin, D.H.; Park, R.H.; Yang, S.; Jung, J.H. Block-based noise estimation using adaptive gaussian filtering. IEEE Trans. Consum. Electron. 2005, 51, 218–226. [Google Scholar] [CrossRef]
- Pyatykh, S.; Hesser, J.; Zheng, L. Image noise level estimation by principal component analysis. IEEE Trans. Image Process. 2012, 22, 687–699. [Google Scholar] [CrossRef] [PubMed]
- Manjón, J.V.; Coupé, P.; Buades, A. MRI noise estimation and denoising using non-local pca. Med. Image Anal. 2015, 22, 35–47. [Google Scholar] [CrossRef]
- Varon, C.; Alzate, C.; Suykens, J.A. Noise level estimation for model selection in kernel pca denoising. IEEE Trans. Neural Netw. Learn. Syst. 2015, 26, 2650–2663. [Google Scholar] [CrossRef]
- Zeng, H.; Zhan, Y.; Kang, X.; Lin, X. Image splicing localization using pca-based noise level estimation. Multimed. Tools Appl. 2017, 76, 4783–4799. [Google Scholar] [CrossRef]
- Liu, X.; Tanaka, M.; Okutomi, M. Single-image noise level estimation for blind denoising. IEEE Trans. Image Process. 2013, 22, 5226–5237. [Google Scholar] [CrossRef]
- Wang, Z.; Huang, Z.; Xu, Y.; Zhang, Y.; Li, X.; Cai, W. Image noise level estimation by employing chi-square distribution. In Proceedings of the2021 IEEE 21st International Conference on Communication Technology (ICCT), Tianjin, China, 13–16 October 2021; pp. 1158–1161. [Google Scholar]
- Huang, Z.; Zhang, Y.; Li, Q.; Li, X.; Zhang, T.; Sang, N.; Hong, H. Joint analysis and weighted synthesis sparsity priors for simultaneous denoising and destriping optical remote sensing images. IEEE Trans. Geosci. Remote Sens. 2020, 58, 6958–6982. [Google Scholar] [CrossRef]
- Yesilyurt, A.B.; Erol, A.; Kamisli, F.; Alatan, A.A. Single image noise level estimation using dark channel prior. In Proceedings of the 2019 IEEE International Conference on Image Processing (ICIP), Taipei, Taiwan, 22–25 September 2019; pp. 2065–2069. [Google Scholar]
- Huang, Z.; Zhang, Y.; Li, Q.; Zhang, T.; Sang, N. Spatially adaptive denoising for X-ray cardiovascular angiogram images. Biomed. Signal Process. Control. 2018, 40, 131–139. [Google Scholar] [CrossRef]
- Ghazi, M.M.; Erdogan, H. Image noise level estimation based on higher-order statistics. Multimed. Tools Appl. 2017, 76, 2379–2397. [Google Scholar] [CrossRef]
- Turajlic, E. Adaptive svd domain-based white gaussian noise level estimation in images. IEEE Access 2018, 6, 72735–72747. [Google Scholar] [CrossRef]
- Khmag, A.; Ramli, A.R.; Al-haddad, S.A.R.; Kamarudin, N. Natural image noise level estimation based on local statistics for blind noise reduction. Vis. Comput. 2018, 34, 575–587. [Google Scholar] [CrossRef]
- Chen, L.; Huang, X.; Tian, J.; Fu, X. Blind noisy image quality evaluation using a deformable ant colony algorithm. Opt. Laser Technol. 2015, 57, 265–270. [Google Scholar] [CrossRef]
- Huang, Z.; Zhu, Z.; An, Q.; Wang, Z.; Zhou, Q.; Zhang, T.; Alshomrani, A.S. Luminance learning for remotely sensed image enhancement guided by weighted least squares. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Martin, D.; Fowlkes, C.; Tal, D.; Malik, J. A database of human segmented natural images and its application to evaluating segmentation algorithms and measuring ecological statistics. In Proceedings of the 8th International Conference on Computer Vision, Vancouver, BC, Canada, 9–12 July 2001; Volume 2, pp. 416–423. [Google Scholar]
- Dabov, K.; Foi, A.; Katkovnik, V.; Egiazarian, K. Image denoising by sparse 3-d transform-domain collaborative filtering. IEEE Trans. Image Process. 2007, 16, 2080–2095. [Google Scholar] [CrossRef]
- Huang, Z.; Wang, L.; An, Q.; Zhou, Q.; Hong, H. Learning a contrast enhancer for intensity correction of remotely sensed images. IEEE Signal Process. Lett. 2022, 29, 394–398. [Google Scholar] [CrossRef]
- Huang, Z.; Wang, Z.; Zhu, Z.; Zhang, Y.; Fang, H.; Shi, Y.; Zhang, T. Spatially adaptive multi-scale image enhancement based on nonsubsampled contourlet transform. Infrared Phys. Technol. 2022, 121, 104014. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Noise Level | 5 | 10 | 15 | 20 | 25 | 30 | 35 | 40 | 45 | 50 |
|---|---|---|---|---|---|---|---|---|---|---|
| Donoho [18] | 0.7058 | 0.6157 | 0.5241 | 0.5013 | 0.3696 | 0.4358 | 0.3562 | 0.3248 | 0.3010 | 0.3885 |
| J. Immerkar [10] | 0.8334 | 0.6019 | 0.4510 | 0.3513 | 0.2887 | 0.2427 | 0.2479 | 0.2362 | 0.2554 | 0.2411 |
| S. I. Olsen [8] | 0.6182 | 0.5561 | 0.4901 | 0.5190 | 0.4459 | 0.4680 | 0.4862 | 0.4522 | 0.3838 | 0.4088 |
| S. Pyatykh [28] | 0.5190 | 0.3329 | 0.2391 | 0.1873 | 0.2160 | 0.2960 | 0.3165 | 0.1717 | 0.2614 | 0.2485 |
| Tai Yang [14] | 0.1361 | 0.1999 | 0.1732 | 0.2028 | 0.2247 | 0.1696 | 0.2226 | 0.2053 | 0.3556 | 0.4126 |
| Our proposed | 0.1057 | 0.1802 | 0.1994 | 0.1406 | 0.1312 | 0.1272 | 0.1163 | 0.1326 | 0.0845 | 0.1624 |
| BM3D [43] + | Church | MoorishIdol | Stable | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Predictive Model | 10 | 20 | 40 | 10 | 20 | 40 | 10 | 20 | 40 |
| True noise level (benchmark) | 34.5386 ± 0.0215 | 31.0408 ± 0.0364 | 27.8572 ± 0.0451 | 32.9813 ± 0.0207 | 29.4181 ± 0.0325 | 26.4669 ± 0.0342 | 32.0914 ± 0.0179 | 28.2578 ± 0.026 2 | 25.2087 ± 0.0264 |
| Tai Yang [14] | 34.5259 ± 0.0236 | 31.0271 ± 0.0367 | 27.8536 ± 0.0456 | 32.9708 ± 0.0192 | 29.4011 ± 0.0338 | 26.4630 ± 0.0350 | 32.0358 ± 0.0231 | 28.1978 ± 0.0313 | 25.1916 ± 0.0292 |
| Donoho [18] | 34.4205 ± 0.0254 | 30.9860 ± 0.0360 | 27.8447 ± 0.0461 | 32.7986 ± 0.0220 | 29.3387 ± 0.0342 | 26.4538 ± 0.0330 | 31.6144 ± 0.0296 | 28.0578 ± 0.0303 | 25.1678 ± 0.0287 |
| Immeakar [10] | 34.4438 ± 0.0232 | 30.9898 ± 0.0369 | 27.8449 ± 0.0455 | 32.8660 ± 0.0177 | 29.3583 ± 0.0333 | 26.4505 ± 0.0337 | 31.6606 ± 0.0251 | 28.0919 ± 0.0273 | 25.1670 ± 0.0274 |
| S. I. Olsen [8] | 34.5307 ± 0.0216 | 31.0705 ± 0.0365 | 27.8540 ± 0.0437 | 32.9744 ± 0.0207 | 29.4382 ± 0.0330 | 26.4795 ± 0.0355 | 31.9148 ± 0.0320 | 28.2026 ± 0.0337 | 25.2394 ± 0.0262 |
| S. Pyatykh [28] | 34.5170 ± 0.0232 | 31.0326 ± 0.0390 | 27.8602 ± 0.0452 | 32.9632 ± 0.0212 | 29.4093 ± 0.0328 | 26.4700 ± 0.0337 | 31.9727 ± 0.0265 | 28.2078 ± 0.0288 | 25.2043 ± 0.0282 |
| Our proposed | 34.5359 ± 0.0237 | 31.0322 ± 0.0312 | 27.8526 ± 0.0459 | 32.9826 ± 0.0264 | 29.4206 ± 0.0264 | 26.4661 ± 0.0302 | 32.0962 ± 0.0214 | 28.2592 ± 0.0230 | 25.1962 ± 0.0259 |
| BM3D [43] + | Cactus | Desert | Koala | ||||||
| Predictive Model | 10 | 20 | 40 | 10 | 20 | 40 | 10 | 20 | 40 |
| True noise level (benchmark) | 32.1121 ± 0.0208 | 28.4538 ± 0.0263 | 25.6292 ± 0.0291 | 32.9813 ± 0.0207 | 29.4181 ± 0.0325 | 26.4669 ± 0.0342 | 33.9070 ± 0.0185 | 30.4351 ± 0.0290 | 27.5316 ± 0.0370 |
| Tai Yang [14] | 32.0414 ± 0.0241 | 28.4121 ± 0.0349 | 25.6221 ± 0.0289 | 32.9708 ± 0.0192 | 29.4011 ± 0.0338 | 26.4630 ± 0.0350 | 33.9049 ± 0.0180 | 30.4268 ± 0.0284 | 27.5322 ± 0.0366 |
| Donoho [18] | 31.6267 ± 0.0259 | 28.3106 ± 0.0276 | 25.6093 ± 0.0298 | 32.7986 ± 0.0220 | 29.3387 ± 0.0342 | 26.4538 ± 0.0330 | 33.8378 ± 0.0219 | 30.4063 ± 0.0284 | 27.5333 ± 0.0370 |
| Immeakar [10] | 31.7469 ± 0.0227 | 28.3446 ± 0.0278 | 25.6079 ± 0.0289 | 32.8660±0.0177 | 29.3583 ± 0.0333 | 26.4505 ± 0.0337 | 33.8755 ± 0.0193 | 30.4110 ± 0.0286 | 27.5321 ± 0.0369 |
| S. I. Olsen [8] | 32.0035 ± 0.0237 | 28.4579 ± 0.0270 | 25.6467 ± 0.0296 | 32.9744±0.0207 | 29.4382 ± 0.0330 | 26.4795 ± 0.0355 | 33.9043 ± 0.0197 | 30.4461 ± 0.0294 | 27.4901 ± 0.0372 |
| S. Pyatykh [28] | 32.0124 ± 0.0284 | 28.4252 ± 0.0314 | 25.6301 ± 0.0289 | 32.9632 ± 0.0212 | 29.4093 ± 0.0328 | 26.4700 ± 0.0337 | 33.9063 ± 0.0183 | 30.4358 ± 0.0288 | 27.5290 ± 0.0370 |
| Our proposed | 32.1210 ± 0.0190 | 28.4463 ± 0.0228 | 25.6193 ± 0.0342 | 32.9826 ± 0.0264 | 29.4206 ± 0.0264 | 26.4661 ± 0.0302 | 33.9071 ± 0.0228 | 30.4244 ± 0.0316 | 27.5426 ± 0.0341 |
| BM3D [43] + | Church | MoorishIdol | Stable | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Predictive Model | 10 | 20 | 40 | 10 | 20 | 40 | 10 | 20 | 40 |
| True noise level (benchmark) | 0.9162 ± 0.0004 | 0.8542 ± 0.0012 | 0.7581 ± 0.0019 | 0.9125 ± 0.0005 | 0.8251 ± 0.0015 | 0.6983 ± 0.0032 | 0.9188 ± 0.0005 | 0.8175 ± 0.0013 | 0.6862 ± 0.0020 |
| Tai Yang [14] | 0.9156 ± 0.0005 | 0.8539 ± 0.0012 | 0.7583 ± 0.0019 | 0.9112 ± 0.0006 | 0.8241 ± 0.0016 | 0.6981 ± 0.0031 | 0.9150 ± 0.0008 | 0.8132 ± 0.0016 | 0.6852 ± 0.0022 |
| Donoho [18] | 0.9123 ± 0.0005 | 0.8527 ± 0.0012 | 0.7586 ± 0.0019 | 0.9041 ± 0.0006 | 0.8210 ± 0.0016 | 0.6976 ± 0.0032 | 0.8998 ± 0.0009 | 0.8043 ± 0.0015 | 0.6837 ± 0.0021 |
| Immeakar [10] | 0.9129 ± 0.0004 | 0.8528 ± 0.0012 | 0.7589 ± 0.0019 | 0.9064 ± 0.0005 | 0.8219 ± 0.0015 | 0.6975 ± 0.0032 | 0.9012 ± 0.0008 | 0.8064 ± 0.0014 | 0.6837 ± 0.0021 |
| S. I. Olsen [8] | 0.9158 ± 0.0005 | 0.8548 ± 0.0012 | 0.7511 ± 0.0025 | 0.9115 ± 0.0006 | 0.8264 ± 0.0016 | 0.6984 ± 0.0031 | 0.9122 ± 0.0011 | 0.8135 ± 0.0018 | 0.6879 ± 0.0021 |
| S. Pyatykh [28] | 0.9152 ± 0.0005 | 0.8540± 0.0012 | 0.7517 ± 0.0020 | 0.9107 ± 0.0006 | 0.8246 ± 0.0016 | 0.6985 ± 0.0031 | 0.9122 ± 0.0009 | 0.8139 ± 0.0015 | 0.6859 ± 0.0021 |
| Our proposed | 0.9159 ± 0.0005 | 0.8540 ± 0.0009 | 0.7580 ± 0.0018 | 0.9128 ± 0.0006 | 0.8251 ± 0.0014 | 0.6983 ± 0.0032 | 0.9197 ± 0.0005 | 0.8172 ± 0.0013 | 0.6856 ± 0.0017 |
| BM3D [43] + | Cactus | Desert | Koala | ||||||
| Predictive Model | 10 | 20 | 40 | 10 | 20 | 40 | 10 | 20 | 40 |
| True noise level (benchmark) | 0.9049 ± 0.0005 | 0.8008 ± 0.0014 | 0.6805 ± 0.0019 | 0.8786 ± 0.0007 | 0.8029 ± 0.0010 | 0.7222 ± 0.0015 | 0.9117 ± 0.0005 | 0.8166 ± 0.0013 | 0.6957 ± 0.0027 |
| Tai Yang [14] | 0.9010 ± 0.0008 | 0.7975 ± 0.0019 | 0.6799±0.0020 | 0.8750 ± 0.0012 | 0.8020 ± 0.0011 | 0.7226 ± 0.0016 | 0.9110 ± 0.0006 | 0.8158 ± 0.0013 | 0.6956± 0.0027 |
| Donoho [18] | 0.8853 ± 0.0008 | 0.7905 ± 0.0014 | 0.6789 ± 0.0020 | 0.8687 ± 0.0009 | 0.8006 ± 0.0011 | 0.7228 ± 0.0015 | 0.9074 ± 0.0007 | 0.8141 ± 0.0013 | 0.6955 ± 0.0027 |
| Immeakar [10] | 0.8895 ± 0.0007 | 0.7927 ± 0.0015 | 0.6788 ± 0.0020 | 0.8696 ± 0.0008 | 0.8005 ± 0.0010 | 0.7233 ± 0.0014 | 0.9091 ± 0.0006 | 0.8144 ± 0.0013 | 0.6951 ± 0.0027 |
| S. I. Olsen [8] | 0.8994 ± 0.0007 | 0.8011 ± 0.0015 | 0.6819 ± 0.0020 | 0.8766 ± 0.0010 | 0.8046 ± 0.0009 | 0.7141 ± 0.0019 | 0.9109 ± 0.0007 | 0.8184 ± 0.0013 | 0.6948 ± 0.0026 |
| S. Pyatykh [28] | 0.8997 ± 0.0009 | 0.7985 ± 0.0019 | 0.6805 ± 0.0020 | 0.8750 ± 0.0011 | 0.8025 ± 0.0011 | 0.7215 ± 0.0016 | 0.9111 ± 0.0006 | 0.8167 ± 0.0013 | 0.6958± 0.0027 |
| Our proposed | 0.9056 ± 0.0006 | 0.8000 ± 0.0014 | 0.6800 ± 0.0021 | 0.8776 ± 0.0009 | 0.8022 ± 0.0011 | 0.7219 ± 0.0017 | 0.9115 ± 0.0005 | 0.8150 ± 0.0017 | 0.6958 ± 0.0024 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; An, Q.; Zhu, Z.; Fang, H.; Huang, Z. Blind Additive Gaussian White Noise Level Estimation from a Single Image by Employing Chi-Square Distribution. Entropy 2022, 24, 1518. https://doi.org/10.3390/e24111518
Wang Z, An Q, Zhu Z, Fang H, Huang Z. Blind Additive Gaussian White Noise Level Estimation from a Single Image by Employing Chi-Square Distribution. Entropy. 2022; 24(11):1518. https://doi.org/10.3390/e24111518
Chicago/Turabian StyleWang, Zhicheng, Qing An, Zifan Zhu, Hao Fang, and Zhenghua Huang. 2022. "Blind Additive Gaussian White Noise Level Estimation from a Single Image by Employing Chi-Square Distribution" Entropy 24, no. 11: 1518. https://doi.org/10.3390/e24111518
APA StyleWang, Z., An, Q., Zhu, Z., Fang, H., & Huang, Z. (2022). Blind Additive Gaussian White Noise Level Estimation from a Single Image by Employing Chi-Square Distribution. Entropy, 24(11), 1518. https://doi.org/10.3390/e24111518