

Conflict Dynamics in Scale-Free Networks with Degree Correlations and Hierarchical Structure

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Methods and Models
2.1. Network Models and Metrics
2.1.1. Scale-Free Networks with Degree Correlations
2.1.2. Hierarchical Networks
2.1.3. Metrics
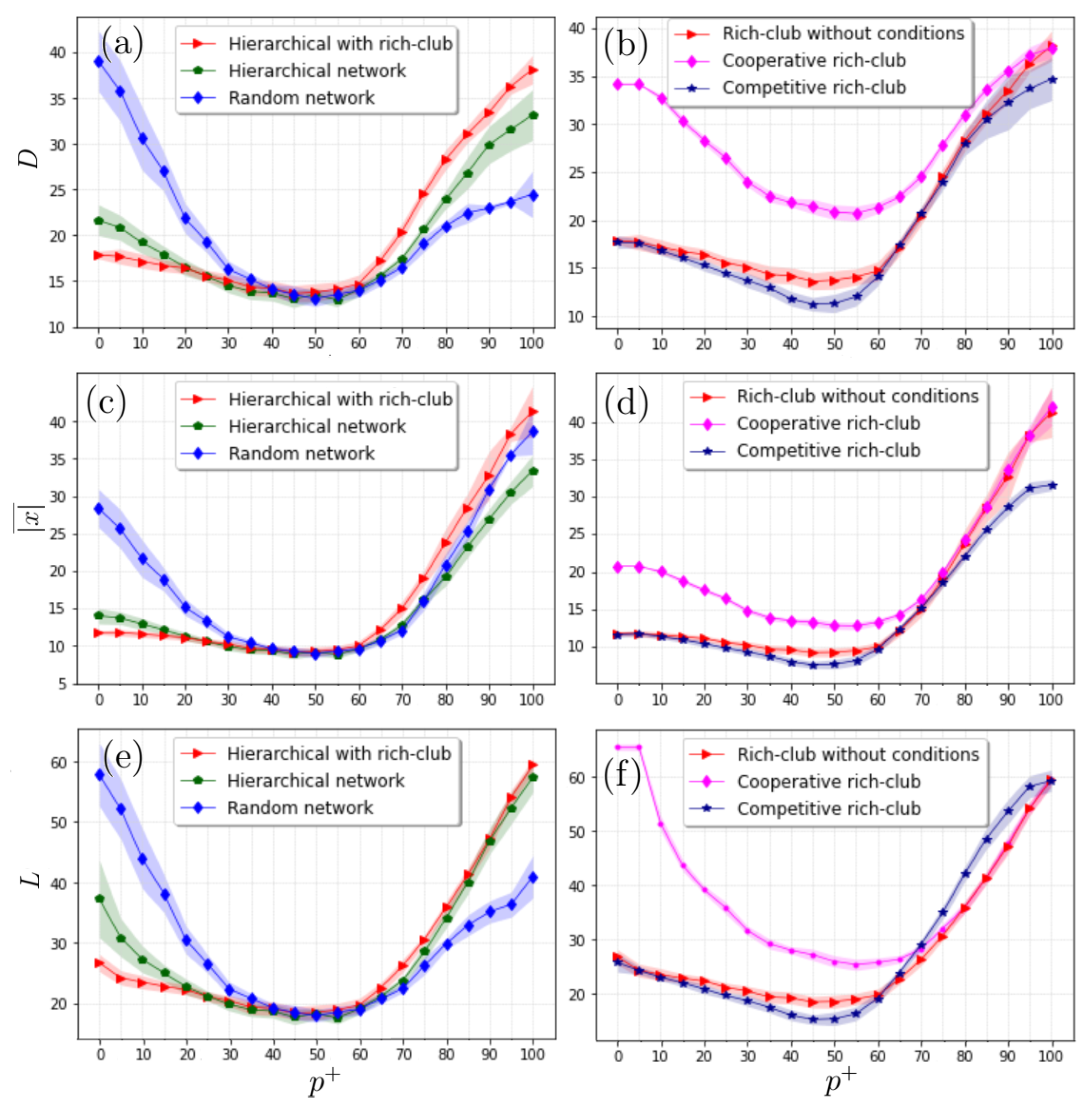
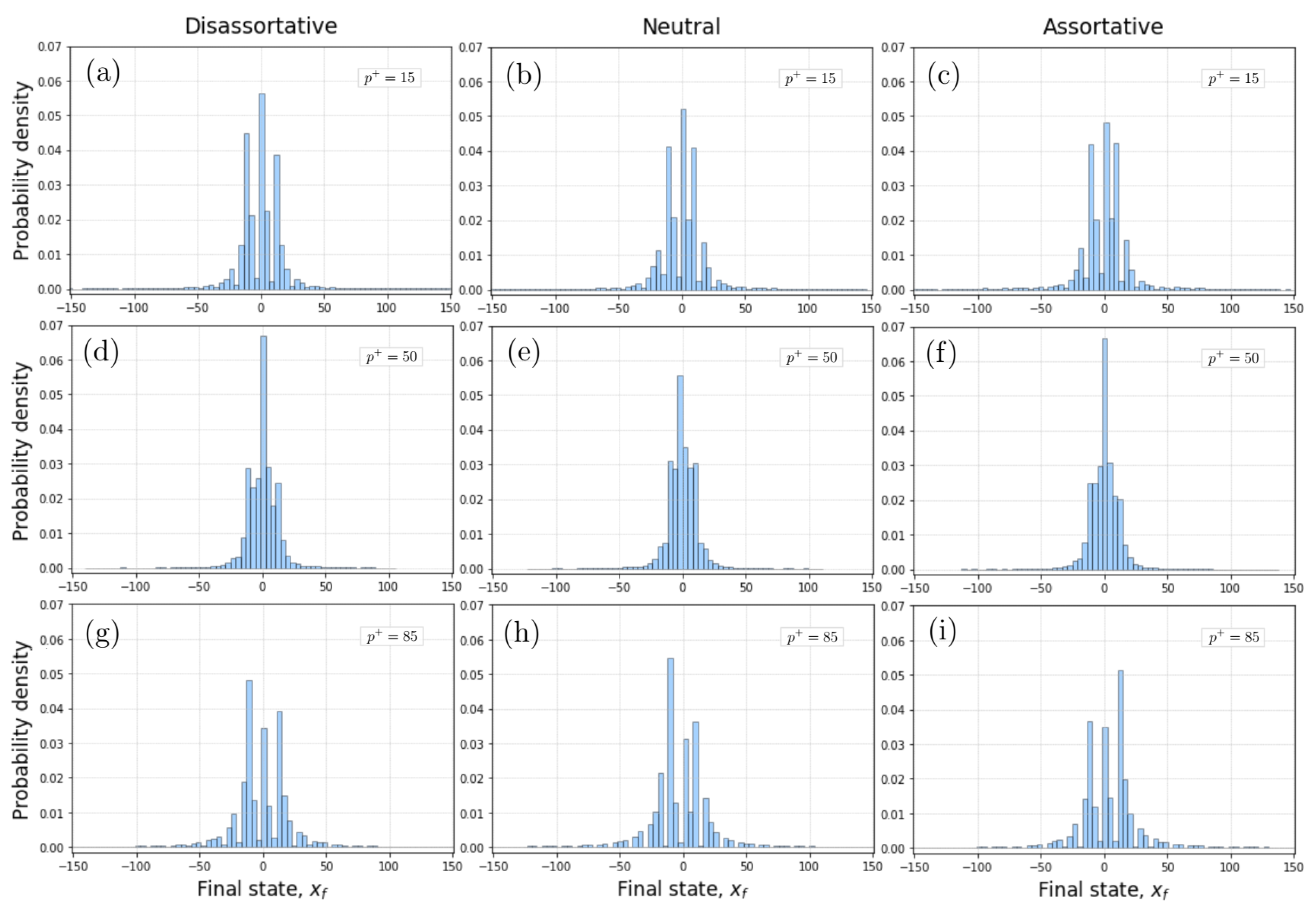
- The average of the absolute values of the final states is defined aswhere is the absolute value of the final state of actor i.
- The distance according to sign is defined aswhere () represents the average of all positive (negative) actor’s states.
- The mean global distance, D, is defined aswhere are the final states of the actors , respectively.
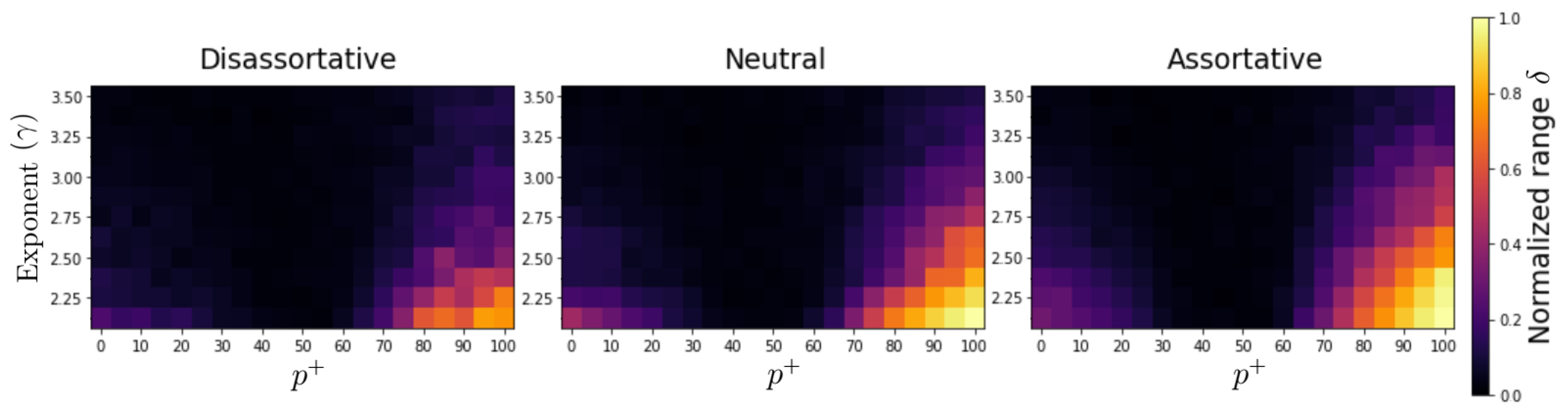
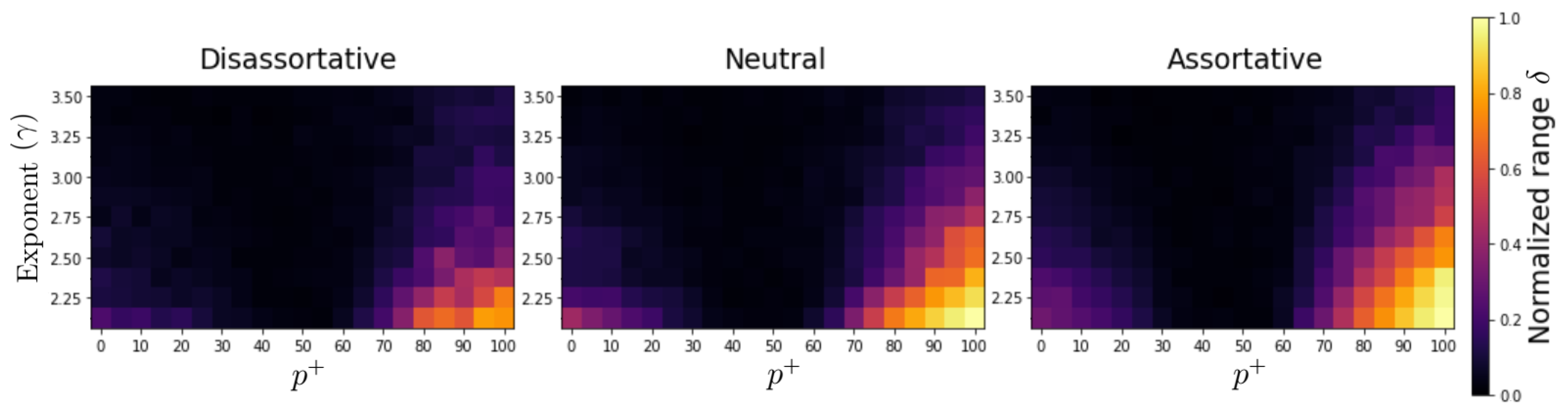
- The normalized range of the number of negative and positive nodes, , is defined aswhere () is the total number of positive (negative) final states.
3. Results
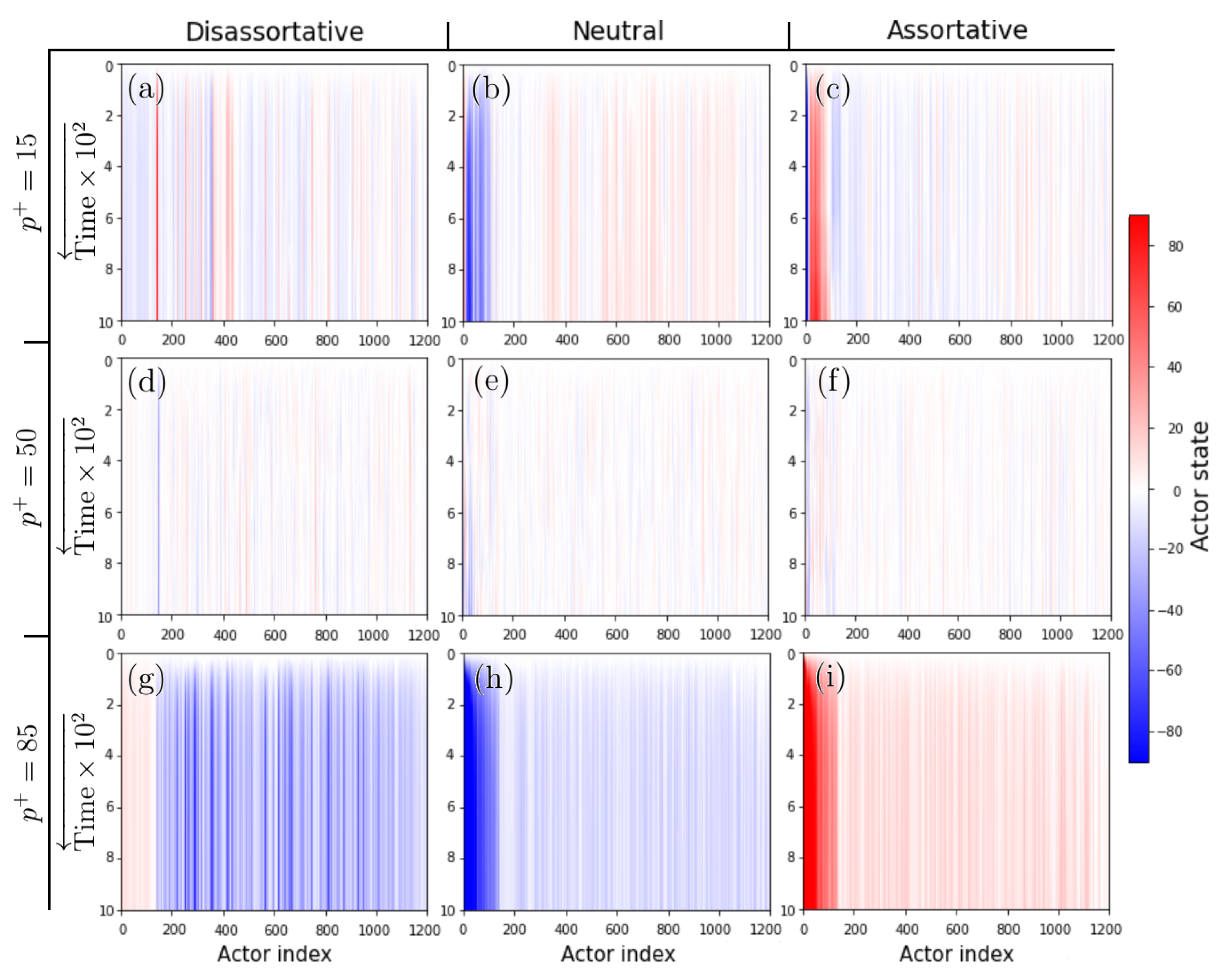
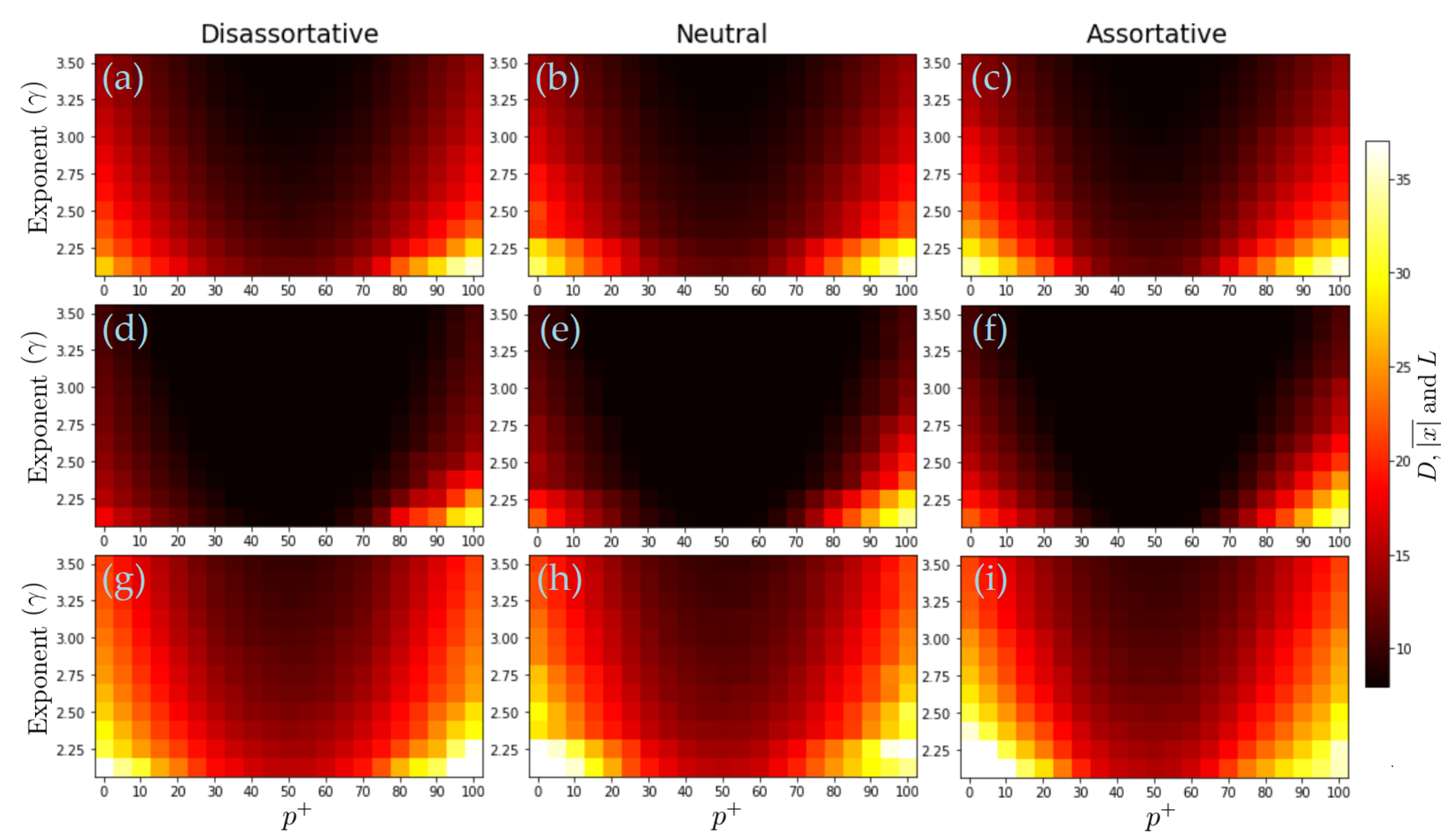
3.1. Scale-Free Networks with Degree–Degree Correlations
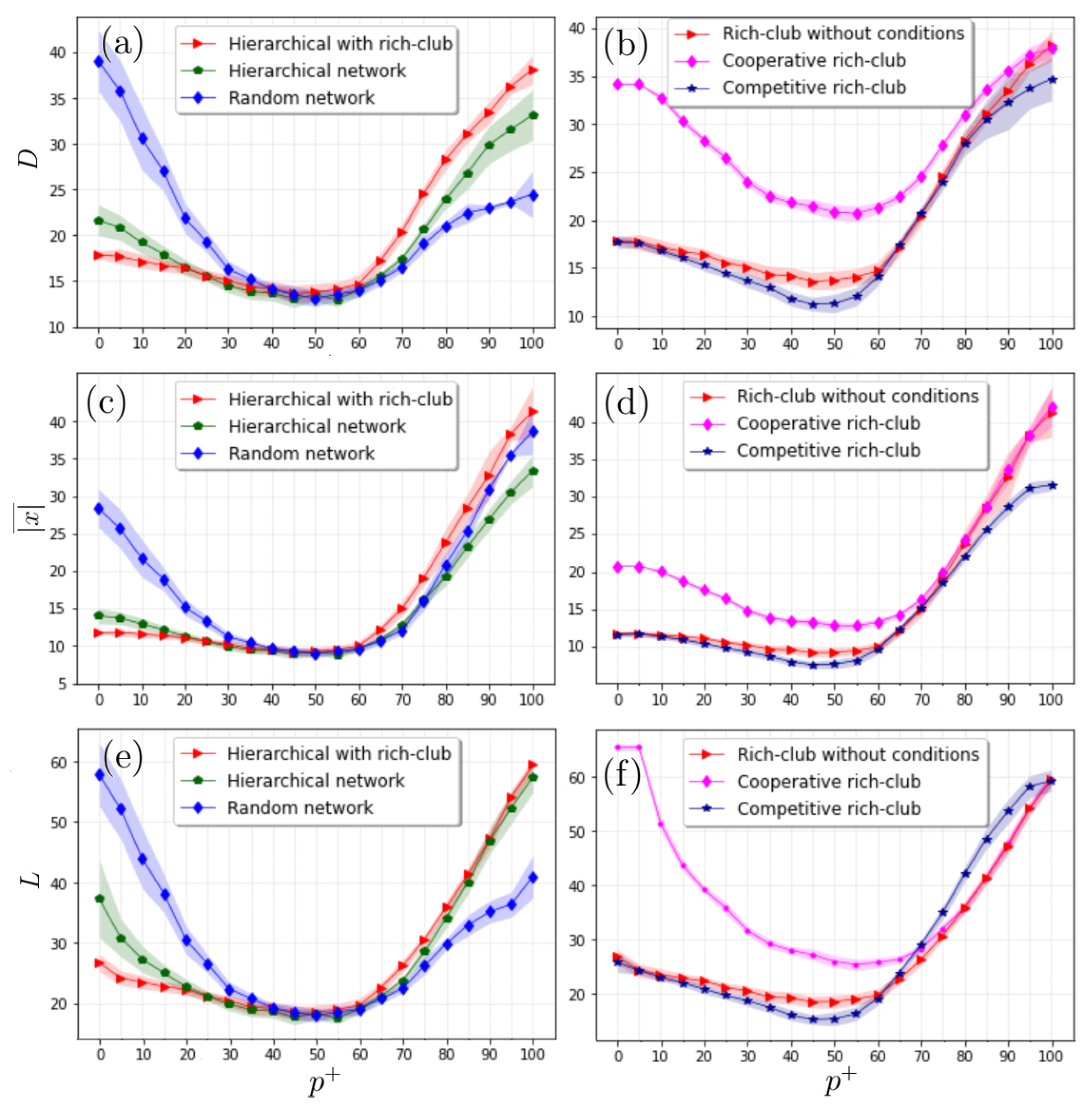
3.2. Hierarchical SF Networks and the Rich Club
4. Discussion and Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Portillo, J.R.; Soler-Toscano, F.; Langa, J.A. Cooperation enhances structural stability in mutualistic systems. bioRxiv 2022. [Google Scholar] [CrossRef]
- Maslov, S.; Sneppen, K.; Ispolatov, I. Spreading out of perturbations in reversible reaction networks. New J. Phys. 2007, 9, 273. [Google Scholar] [CrossRef] [PubMed]
- Stern, M.; Sompolinsky, H.; Abbott, L.F. Dynamics of random neural networks with bistable units. Phys. Rev. E 2014, 90, 062710. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lee, S.; Rocha, L.E.; Liljeros, F.; Holme, P. Exploiting temporal network structures of human interaction to effectively immunize populations. PLoS ONE 2012, 7, e36439. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Isakov, A.; Fowler, J.H.; Airoldi, E.M.; Christakis, N.A. The Structure of Negative Social Ties in Rural Village Networks. Sociol. Sci. 2019, 6, 197–218. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liebovitch, L.; Coleman, P.; Bechhofer, A.; Colon, C.; Donahue, J.; Eisenbach, C.; Guzmán-Vargas, L.; Jacobs, D.; Khan, A.; Li, C.; et al. Complexity analysis of sustainable peace: Mathematical models and data science measurements. New J. Phys. 2019, 21, 073022. [Google Scholar] [CrossRef]
- Li, Y.X.; Jin, X.G.; Kong, F.S.; Luo, H.L. Strategic games on a hierarchical network model. J. Zhejiang Univ. Sci. A 2008, 9, 271–278. [Google Scholar] [CrossRef]
- Fernández-Rosales, I.Y.; Liebovitch, L.S.; Guzmán-Vargas, L. The dynamic consequences of cooperation and competition in small-world networks. PLoS ONE 2015, 10, e0126234. [Google Scholar] [CrossRef]
- Hens, C.; Harush, U.; Haber, S.; Cohen, R.; Barzel, B. Spatiotemporal signal propagation in complex networks. Nat. Phys. 2019, 15, 403–412. [Google Scholar] [CrossRef]
- Li, A.; Zhou, L.; Su, Q.; Cornelius, S.P.; Liu, Y.Y.; Wang, L.; Levin, S.A. Evolution of cooperation on temporal networks. Nat. Commun. 2020, 11, 2259. [Google Scholar] [CrossRef]
- Pirani, M.; Costa, T.; Sundaram, S. Stability of dynamical systems on a graph. In Proceedings of the 53rd IEEE Conference on Decision and Control, Los Angeles, CA, USA, 15–17 December 2014; pp. 613–618. [Google Scholar]
- Barzel, B.; Barabási, A.L. Universality in network dynamics. Nat. Phys. 2013, 9, 673–681. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Santos, F.C.; Rodrigues, J.; Pacheco, J.M. Graph topology plays a determinant role in the evolution of cooperation. Proc. R. Soc. B Biol. Sci. 2006, 273, 51–55. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Erdös, P.; Rényi, A. On Random Graphs I. Publ. Math. Debr. 1959, 6, 290–297. [Google Scholar]
- Barabási, A.L.; Ravasz, E.; Vicsek, T. Deterministic scale-free networks. Phys. A Stat. Mech. Its Appl. 2001, 299, 559–564. [Google Scholar] [CrossRef] [Green Version]
- Posfai, M.; Barabási, A.L. Network Science; Cambridge University Press: Cambridge, UK, 2016. [Google Scholar]
- Newman, M. Networks; Oxford University Press: Oxford, UK, 2018. [Google Scholar]
- Aparicio, S.; Villazón-Terrazas, J.; Álvarez, G. A model for scale-free networks: Application to twitter. Entropy 2015, 17, 5848–5867. [Google Scholar] [CrossRef] [Green Version]
- Orabona, F.; Pál, D. Scale-free online learning. Theor. Comput. Sci. 2018, 716, 50–69. [Google Scholar] [CrossRef] [Green Version]
- Feng, R.; Yang, Y.; Hu, W.; Wu, F.; Zhang, Y. Representation learning for scale-free networks. In Proceedings of the AAAI Conference on Artificial Intelligence, New Orleans, LA, USA, 2–7 February 2018; Volume 32. [Google Scholar]
- Ji, J.; Song, S.; Tang, C.; Gao, S.; Tang, Z.; Todo, Y. An artificial bee colony algorithm search guided by scale-free networks. Inf. Sci. 2019, 473, 142–165. [Google Scholar] [CrossRef]
- Juárez-López, R.; Obregón-Quintana, B.; Hernández-Pérez, R.; Reyes-Ramírez, I.; Guzmán-Vargas, L. Evaluating the transport in small-world and scale-free networks. Chaos Solitons Fractals 2014, 69, 100–106. [Google Scholar] [CrossRef]
- Martinello, M.; Hidalgo, J.; Maritan, A.; Di Santo, S.; Plenz, D.; Muñoz, M.A. Neutral theory and scale-free neural dynamics. Phys. Rev. X 2017, 7, 041071. [Google Scholar] [CrossRef] [Green Version]
- Pastor-Satorras, R.; Castellano, C.; Van Mieghem, P.; Vespignani, A. Epidemic processes in complex networks. Rev. Mod. Phys. 2015, 87, 925. [Google Scholar] [CrossRef] [Green Version]
- Qiu, T.; Liu, J.; Si, W.; Wu, D.O. Robustness optimization scheme with multi-population co-evolution for scale-free wireless sensor networks. IEEE/ACM Trans. Netw. 2019, 27, 1028–1042. [Google Scholar] [CrossRef]
- Barabasi, A.L.; Oltvai, Z.N. Network biology: Understanding the cell’s functional organization. Nat. Rev. Genet. 2004, 5, 101–113. [Google Scholar] [CrossRef] [PubMed]
- Cho, D.Y.; Kim, Y.A.; Przytycka, T.M. Chapter 5: Network biology approach to complex diseases. PLoS Comput. Biol. 2012, 8, e1002820. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Perc, M. Evolution of cooperation on scale-free networks subject to error and attack. New J. Phys. 2009, 11, 033027. [Google Scholar] [CrossRef]
- Zhou, S.; Mondragón, R.J. The rich-club phenomenon in the Internet topology. IEEE Commun. Lett. 2004, 8, 180–182. [Google Scholar] [CrossRef] [Green Version]
- Gasparini, M.; Izquierdo, J.L.C.; Clarisó, R.; Brambilla, M.; Cabot, J. Analyzing rich-club behavior in open source projects. In Proceedings of the 15th International Symposium on Open Collaboration, Skövde, Sweden, 20–22 August 2019; pp. 1–9. [Google Scholar]
- McAuley, J.J.; da Fontoura Costa, L.; Caetano, T.S. Rich-club phenomenon across complex network hierarchies. Appl. Phys. Lett. 2007, 91, 084103. [Google Scholar] [CrossRef] [Green Version]
- Nowak, M.A.; May, R.M. Evolutionary games and spatial chaos. Nature 1992, 359, 826–829. [Google Scholar] [CrossRef]
- Santos, F.C.; Pacheco, J.M. Scale-free networks provide a unifying framework for the emergence of cooperation. Phys. Rev. Lett. 2005, 95, 098104. [Google Scholar] [CrossRef] [Green Version]
- Ashlock, D.A. Cooperation in prisoner’s dilemma on graphs. In Proceedings of the 2007 IEEE Symposium on Computational Intelligence and Games, Honolulu, HI, USA, 1–5 April 2007; pp. 48–55. [Google Scholar]
- Ichinose, G.; Sayama, H. Invasion of cooperation in scale-free networks: Accumulated versus average payoffs. Artif. Life 2017, 23, 25–33. [Google Scholar] [CrossRef] [Green Version]
- Guo, H.; Jia, D.; Sendiña-Nadal, I.; Zhang, M.; Wang, Z.; Li, X.; Alfaro-Bittner, K.; Moreno, Y.; Boccaletti, S. Evolutionary games on simplicial complexes. Chaos Solitons Fractals 2021, 150, 111103. [Google Scholar] [CrossRef]
- Civilini, A.; Anbarci, N.; Latora, V. Evolutionary game model of group choice dilemmas on hypergraphs. Phys. Rev. Lett. 2021, 127, 268301. [Google Scholar] [CrossRef] [PubMed]
- Xu, Y.; Feng, M.; Zhu, Y.; Xia, C. Multi-player snowdrift game on scale-free simplicial complexes. Phys. A Stat. Mech. Its Appl. 2022, 604, 127698. [Google Scholar] [CrossRef]
- Deutsch, M. A theory of co-operation and competition. Hum. Relations 1949, 2, 129–152. [Google Scholar] [CrossRef]
- Deutsch, M.; Coleman, P.T.; Marcus, E.C. The Handbook of Conflict Resolution: Theory and Practice; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Liebovitch, L.S.; Naudot, V.; Vallacher, R.; Nowak, A.; Bui-Wrzosinska, L.; Coleman, P. Dynamics of two-actor cooperation–competition conflict models. Phys. A Stat. Mech. Its Appl. 2008, 387, 6360–6378. [Google Scholar] [CrossRef]
- Ichinose, G.; Tenguishi, Y.; Tanizawa, T. Robustness of cooperation on scale-free networks under continuous topological change. Phys. Rev. E 2013, 88, 052808. [Google Scholar] [CrossRef] [Green Version]
- Barabási, A.L.; Albert, R. Emergence of scaling in random networks. Science 1999, 286, 509–512. [Google Scholar] [CrossRef] [Green Version]
- Ravasz, E.; Barabási, A.L. Hierarchical organization in complex networks. Phys. Rev. E 2003, 67, 026112. [Google Scholar] [CrossRef] [Green Version]
- Newman, M.E. Assortative mixing in networks. Phys. Rev. Lett. 2002, 89, 208701. [Google Scholar] [CrossRef] [Green Version]
- Cantwell, G.T.; Newman, M. Mixing patterns and individual differences in networks. Phys. Rev. E 2019, 99, 042306. [Google Scholar] [CrossRef] [Green Version]
- Rojas-Pacheco, A.; Obregón-Quintana, B.; Liebovitch, L.; Guzmán-Vargas, L. Time-delay effects on dynamics of a two-actor conflict model. Phys. A Stat. Mech. Its Appl. 2013, 392, 458–467. [Google Scholar] [CrossRef]
- Molloy, M.; Reed, B. A critical point for random graphs with a given degree sequence. Random Struct. Algorithms 1995, 6, 161–180. [Google Scholar] [CrossRef]
- Bertotti, M.L.; Modanese, G. The configuration model for Barabasi-Albert networks. Appl. Netw. Sci. 2019, 4, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Boguná, M.; Pastor-Satorras, R.; Vespignani, A. Cut-offs and finite size effects in scale-free networks. Eur. Phys. J. B 2004, 38, 205–209. [Google Scholar] [CrossRef]
- Doyle, J.C.; Alderson, D.L.; Li, L.; Low, S.; Roughan, M.; Shalunov, S.; Tanaka, R.; Willinger, W. The “robust yet fragile” nature of the Internet. Proc. Natl. Acad. Sci. USA 2005, 102, 14497–14502. [Google Scholar] [CrossRef] [Green Version]
- Everett, M.G.; Borgatti, S.P. Networks containing negative ties. Soc. Netw. 2014, 38, 111–120. [Google Scholar] [CrossRef]
- Rawlings, C.M.; Friedkin, N.E. The structural balance theory of sentiment networks: Elaboration and test. Am. J. Sociol. 2017, 123, 510–548. [Google Scholar] [CrossRef] [Green Version]
- Szell, M.; Lambiotte, R.; Thurner, S. Multirelational organization of large-scale social networks in an online world. Proc. Natl. Acad. Sci. USA 2010, 107, 13636–13641. [Google Scholar] [CrossRef]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jacobo-Villegas, E.; Obregón-Quintana, B.; Guzmán-Vargas, L.; Liebovitch, L.S. Conflict Dynamics in Scale-Free Networks with Degree Correlations and Hierarchical Structure. Entropy 2022, 24, 1571. https://doi.org/10.3390/e24111571
Jacobo-Villegas E, Obregón-Quintana B, Guzmán-Vargas L, Liebovitch LS. Conflict Dynamics in Scale-Free Networks with Degree Correlations and Hierarchical Structure. Entropy. 2022; 24(11):1571. https://doi.org/10.3390/e24111571
Chicago/Turabian StyleJacobo-Villegas, Eduardo, Bibiana Obregón-Quintana, Lev Guzmán-Vargas, and Larry S. Liebovitch. 2022. "Conflict Dynamics in Scale-Free Networks with Degree Correlations and Hierarchical Structure" Entropy 24, no. 11: 1571. https://doi.org/10.3390/e24111571
APA StyleJacobo-Villegas, E., Obregón-Quintana, B., Guzmán-Vargas, L., & Liebovitch, L. S. (2022). Conflict Dynamics in Scale-Free Networks with Degree Correlations and Hierarchical Structure. Entropy, 24(11), 1571. https://doi.org/10.3390/e24111571