1. Introduction
Recently, UAV-assisted communication-network-supporting energy transfer has gained significant attention. With the advantages of flexible deployment and low-cost deployment, UAVs can quickly establish A2G links and transmit information and energy to ground users [
1,
2]. UAVs have been widely used in emergency communications to quickly restore ground equipment communications in disaster-stricken areas or improve the quality of service for degraded users in overloaded ground areas. UAV Base Stations (UAV-BSs) equipped with large-scale antenna arrays can provide directional transmission of information and energy, thereby avoiding interference between UAVs caused by strong Line-of-Sight (LoS) paths.
As predicted by Cisco, there will be 14.7 billion Machine-to-Machine (M2M) connections and on average 1.8 connections for each member of the global population by 2023 [
3]. M2M communication or D2D communication is playing a more important role in the industry of the Internet of Things (IoT), by providing a variety of services, such as smart manufacturing, home automation, video surveillance, etc. In addition, D2D communication can offload traffic for base stations by directly establishing a transmission link from the source to the destination [
4]. In mmWave-enabled 5G networks, the high directional beams can improve the link quality and boost the system capacity. However, mmWave networks operating at 30–300 GHz are susceptible to high path loss and are easily blocked by obstacles, which limits the long-distance propagation of signals [
5]. D2D devices can act as relays for the blocked mmWave link by establishing multi-hop communication or directly deliver the pre-cached content to the destinations [
6,
7]. In this case, integrating D2D communication into UAV networks can overcome the problem of the coverage limitation and alleviate the burden of UAVs.
In 5G networks, the transmission based on high directional beams will be widely used, thanks to the wide deployment of mmWave antenna arrays [
8]. At the same time, a huge energy consumption caused by large-scale antenna arrays is also incurred, especially for D2D links. Different from ground BSs or UAV-BSs, which have a stable energy supply, D2D devices equipped with massive antenna arrays are prone to suffer energy shortage. In addition, with the rapid increase of data traffic, the energy consumption of D2D devices has become a major concern in the industry, and the Energy Efficiency (EE) of D2D links needs to be urgently optimized. In this case, EH emerges as a promising way to increase the EE of D2D links by providing continuous energy supply for devices and sustaining the stability of links. Equipped with Radio-Frequency (RF) energy harvesters, D2D links are capable of harvesting energy from ambient RF signals while receiving information data. Not only the desired signal, but the interference and noise can be utilized to perform energy harvesting. This extends the battery life for devices and prolongs the communication period for D2D links, which is also beneficial to the improvement of the network EE.
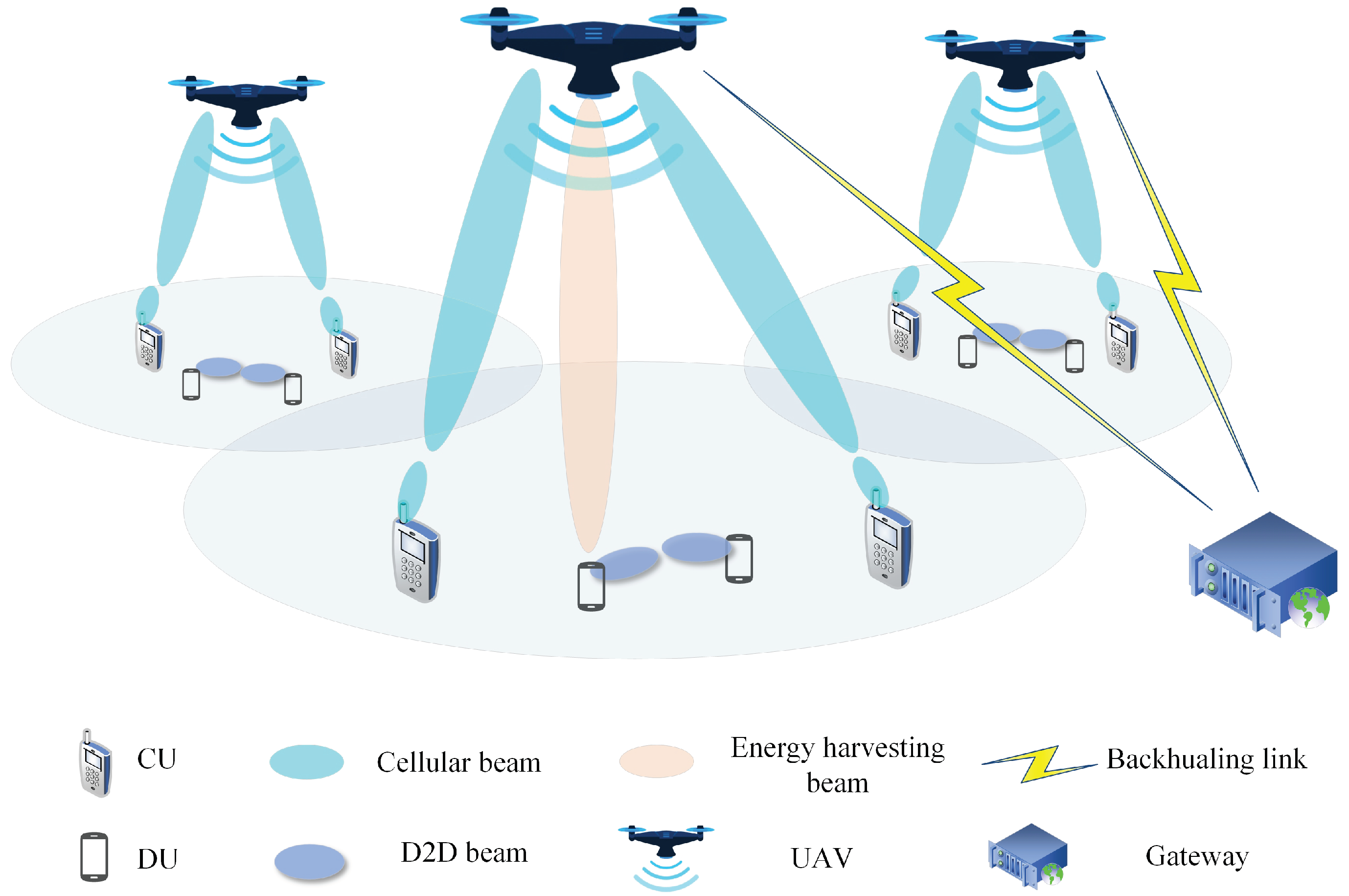
In this paper, we considered an EH-enabled D2D underlying UAV-assisted network scenario, where Simultaneous Wireless Information and Power Transfer (SWIPT) is adopted at the UAVs to enable the transmission of information and energy for ground devices. High directional beams were adopted for Air-to-Ground (A2G) and D2D transmission. While the CUs are receiving the information from the UAV-BSs, D2D transmitters are capable of harvesting energy from the A2G signal. We adopted the EH-BA-DT protocol [
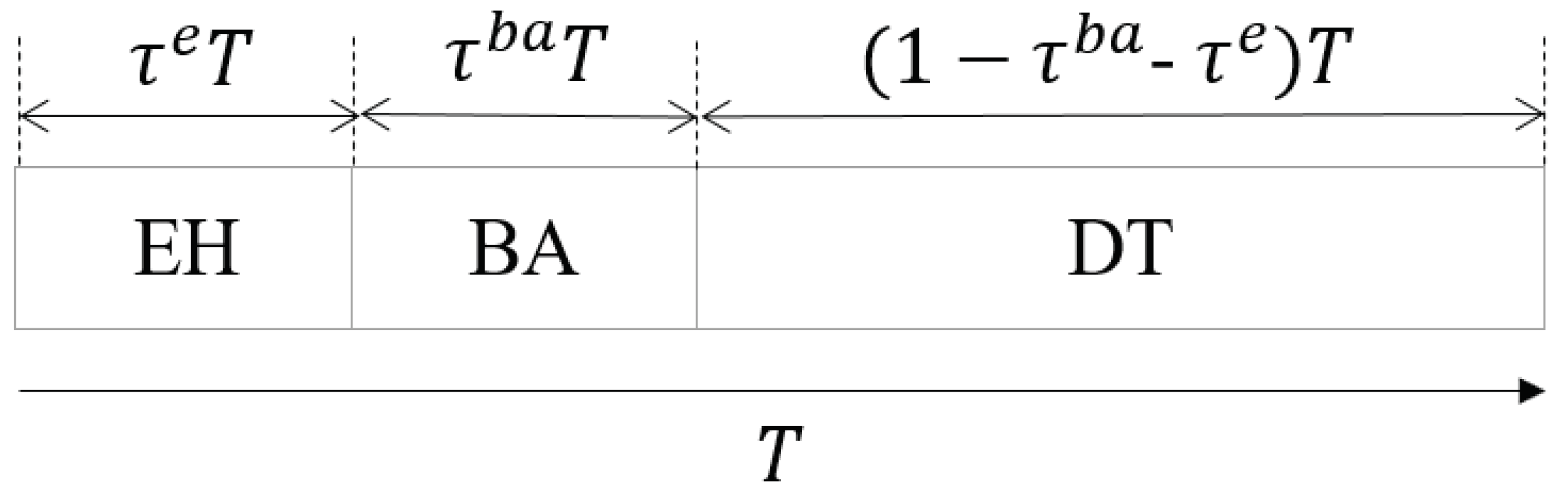
9,
10] for DUs in EH-enabled scenarios. The system time was divided into the EH phase, Beam Alignment (BA) phase, and Data Transmission (DT) phase. As known to all, the network EE is closely related to the user rate and energy consumption. Therefore, to achieve the maximal EE, a tradeoff between increasing the data rate and decreasing the consumed energy is required. In our scenario, the interference issue was complex, which greatly affects the network EE. Misaligned beams will cause severe interference among users, which will also impact the EE of D2D links. In addition, due to the proliferation of mobile devices and the ever-increasing network traffic, data transmission and signaling exchange quickly consume the energy of D2D links, which makes the limited battery capacity of D2D devices easily depleted. To tackle this problem, an effective method is to alleviate the interference and increase the network EE by performing the joint optimization of beamwidths, transmit power, and EH time ratio for D2D pairs.
The beamwidth of the DU is an important factor affecting the user rate and energy efficiency. For the beam-enabled D2D users, the beam alignment process is first executed to determine the best-matched beam pair at the transmitting and receiving side before the transmission process [
11], which means a long beam alignment time will shorten the time for EH and DT, and vice versa. Especially for high-speed mobile users, the process of beam alignment needs to be performed repeatedly. Therefore, controlling the time complexity of beam alignment is helpful to improve the transmission efficiency of the system. Although Exhaustive Search (ES) and Particle Swarm Optimization (PSO) can achieve excellent performance in beam alignment, the time complexity of the algorithms is too large to be effectively applied to the actual network. Therefore, to fully unleash the potential of the mmWave D2D link, it is of great significance to obtain the optimal/sub-optimal beamwidth in a short time to improve the network performance.
Besides, EH emerges as a promising technology to increase the EE of users relying on wireless charging. In traditional low-frequency scenarios, wireless charging has not shown great performance due to the low received signal strength. In 5G mmWave links, multi-antenna system can be employed at the transmitter to achieve effective RF energy harvesting through the enhanced transmission gain brought by beamforming. The authors in [
12,
13,
14] verified the feasibility of the combination of EH and mmWave technology. Although the optimization of the network EE in EH-enabled low-frequency scenarios has been widely studied, there still is a lack of an effective method to improve the network EE in mmWave scenarios. Hence, in this paper, we applied EH to mmWave D2D links and aimed to enhance the battery life of the links by increasing the network EE.
When a D2D link selects a large transmitting and receiving beamwidth, the beam-sweeping process is carried out in a large-angle manner, which will reduce the beam alignment time and increase the time for EH and DT. However, a large transmitting beamwidth will possibly degrade the performance of other links, and a large receiving beam will suffer more serious interference. On the contrary, reducing the transmitting and receiving beamwidth is beneficial to mitigate potential interference, but the time of the BA phase will be greatly prolonged because a huge number of pilot signals are needed to align the beams, which will shorten the time for energy harvesting and data transmission and degrade the system performance.
Moreover, for D2D links, the power and EH time ratio have a significant impact on the network EE. The transmit power not only affects the user’s achievable rate, but also the rate of other D2D links and the overall energy consumption. Therefore, the transmit power for DUs will have a complex impact on the network EE and needs to be optimized. Similarly, the network EE is also closely related to the EH time ratio. Fixing the BA time ratio and increasing the EH time ratio can increase the energy harvested, but this will also reduce the effective transmission time, and vice versa. Moreover, the performance of CUs should be protected by controlling the interference from DUs to CUs.
In this case, to improve the network EE, the three coupling variables, beamwidth, transmit power, and the EH time ratio, need to be considered comprehensively. In this paper, we propose a joint optimization of beamwidth selection, power control, and the EH time ratio to iteratively optimize the variables while fixing the other two. First, a low-complexity beamwidth selection scheme was designed to allow users to find the optimal/sub-optimal beamwidth in a short time. Specifically, DUs first form coalitions to choose different beamwidths. Then, the coalitions are continuously updated along the direction of improving the network utility (i.e., EE) until the final Nash equilibrium is reached. Next, a power control method was designed to suppress the interference and improve the EE. The power levels of D2D transmitters were optimized using the Dinkelbach method and SCA to obtain the sub-optimal power for DUs. Finally, the optimization of the EH time ratio was executed to further improve the EE. The EH time ratio was optimized by solving the convex linear fractional programming. The network EE was iteratively updated until reaching the convergence point.
In conclusion, the main contributions of this paper can be summarized as follows:
Different from existing research, we considered a downlink scenario of EH-enabled D2D underlying a UAV-assisted mmWave network and took into consideration the complex interference issue. We built an efficient framework for improving the EE of D2D links by jointly optimizing the beamwidth, transmit power, and EH time ratio of the D2D links using alternating optimization, while guaranteeing the rate requirements of CUs and DUs. The proposed algorithm has low computation complexity and is applicable to large-scale mmWave networks;
We constructed a coalition game model to solve the beamwidth selection problem for D2D users, which can explore the potential beamwidth combinations of DUs and converge to the beamwidth structure with sub-optimal utility. A low-complexity beamwidth selection algorithm was proposed to adjust the beamwidths of DUs for increasing the network EE;
The transmit power of D2D links was optimized to further improve the system EE. The original non-convex problem with regard to power optimization was solved by non-fractional programming and successive convex approximation. Specifically, we first transformed the non-convex fractional programming into a non-fractional problem using the Dinkelbach method. Next, we eliminated the non-convexity in the formula by approximating the non-convex part with its first-order Taylor expansion. Along with the power, we also optimized the EH time ratio. The problem with regard to the EH time ratio was proven to be a convex linear fractional programming, and hence, the optimal solution is readily obtained;
We validated the convergence and effectiveness of the proposed algorithm by performing numerical experiments with different settings for the network parameters. The proposed algorithm can converge to the optimal EE after finite iterations and effectively improve the network EE compared with the Fixed Beamwidth and Fixed Power (FBFP) scheme. Our proposed algorithm can achieve performance close to ES and PSO, but with much reduced complexity. The factors that potentially affect the network EE, such as the number of DUs, the number of CUs, the maximal power for DUs, the minimum harvested energy, and the minimum rate for CUs, are also thoroughly discussed and analyzed.
The rest of this paper is organized as follows: The related works are given in
Section 2. In
Section 3, the EH-enabled D2D underlying the UAV network model and problem formulation are presented in detail. In
Section 4, the alternating optimization method is employed to jointly optimize the beamwidth, transmit power, and EH time ratio to obtain the sub-optimal EE with a low time complexity. The simulation results are shown and discussed thoroughly in
Section 5. Finally, the conclusions are drawn in
Section 6.
2. Related Works
Under the mmWave network architecture, energy harvesting is capable of providing reliable and sustainable energy coverage and shows better performance than conventional low-frequency scenarios [
12,
13,
14]. The authors of [
15,
16] investigated the performance of energy harvesting in UAV-assisted mmWave technology. The authors of [
15] derived the energy and SINR coverage probability under the UAV mmWave network enabled by energy harvesting. In [
16], the authors analyzed the energy and SINR coverage probability in a hybrid network where sub-6G transmission and mmWave transmission coexist. In [
17], the trajectories of two UAVs for data gathering and energy transferring were optimized using the deep reinforcement learning approach to reduce the system energy consumption and improve the timeliness of service for users. The trajectory optimization was performed in [
18] to minimize the energy consumption of the UAV and guarantee the user rate. In [
19], the authors considered the effect of beam alignment error in an EH-enabled mmWave network and derived the energy coverage probability by assuming a non-linear EH process.
Moreover, energy harvesting can provide new possibilities for improving the performance of D2D communication [
20], which has been the focus of academia [
21,
22,
23,
24,
25,
26]. In [
21], the authors considered a non-linear energy harvesting model and classified the users into the EH group and the non-EH group based on the minimum harvested power threshold. Then, the resource allocation and power control were iteratively optimized to maximize the sum-EE using non-fractional programming and the Lagrange method. The authors of [
22] proposed a power control and time scheduling algorithm to improve the capacity of the system under a time splitting architecture, where each BS was equipped with a single antenna, and they further reformed the algorithm and applied it to the scenario where the BSs were equipped with multiple antennas in [
23]. The authors in [
24] used a stochastic model to derive the ergodic capacity of EH-enabled D2D communication and proposed an effective mode selection method to improve the system EE. The outage issue of EH-based D2D communication has also been widely studied [
25,
26]. In [
25], the outage probability of D2D links was analyzed considering the spectrum sharing between DUs and CUs. A power control scheme for DUs while ensuring the outage probability for CUs below the threshold was proposed in [
26].
In mmWave networks, another issue that attracts the attention of academia is the optimization of the beamwidth. To achieve the tradeoff between alleviating interference and reducing beam alignment complexity, there have been many research works on beamwidth selection in mmWave networks [
9,
10,
11,
27,
28,
29,
30,
31,
32,
33]. In [
11], we proposed an coalition-game-based beamwidth selection algorithm for mmWave-enabled D2D links. In [
27], the authors proposed two joint beamwidth selection and scheduling schemes. The authors exploited the method of interference estimation rather than precise calculation to measure the beam-level interference among the users, which achieved much improved throughput compared with existing standards [
34]. In [
28], the authors revealed the relationship between latency and overhead in the beam alignment process, which indicated that multi-beam simultaneous scan can provide the best tradeoff between latency and overhead. A recent research work [
29] used the geometry model to characterize the beamwidth selection and obtained the near-optimal solution for the beamwidths of users in mmWave networks. In [
30], the authors considered a simple full-duplex mmWave wireless network architecture and exploited the numerical solution to obtain the optimal beamwidth for the users to maximize the network energy efficiency. In D2D communication, the beamwidth design for devices is also a research hotspot. In [
9,
10], the authors considered a single D2D pair in a mmWave network without considering the inter-user interference. The throughput and EE were maximized in [
9,
10], respectively, by optimizing the beamwidth and EH ratio of the D2D pair. To overcome the complexity of ES, PSO has also been applied in beamwidth optimization of V2V communication [
31] and D2D communication [
32,
33] to obtain the sub-optimal solution.
5. Numerical Results
In this section, we present our numerical results to verify the convergence and effectiveness of the proposed algorithm. We considered a heterogeneous mmWave air-to-ground network scenario, where 10 UBSs were deployed above a circular area with a radius of 200 m [
21]. The height of the UAVs was fixed at 100 m [
41]. Multiple CUs and EH-enabled D2D pairs were randomly distributed within the target area. It is worthwhile to note that we assumed the power for each BS was fixed to 46 dBm, and we also set the maximum distance for each D2D link
−
to be 50 m. The minimum beamwidth for DU-
was set to
. The convergence criteria
and
were set to
. The other simulation parameters are shown in
Table 1.
To verify the effectiveness of our algorithm, we compared the performance of the proposed algorithm with the following algorithms:
ES: exhaustive search, which traverses each possible beamwidth combination of DUs in the beamwidth selection phase. ES can obtain the optimal solution to beamwidth selection, but incurs an unbearable time complexity;
PSO [
31]: the particle swarm optimization algorithm, which forms multiple feasible beamwidth solutions to continuously evolve along the direction of increasing the utility until reaching the local optimal/global optimal solution. The parameter in the execution of PSO was the same as in [
31];
GA [
42]: the genetic algorithm, which is also a population-based method. The GA evolves to the optimal/sub-optimal solution using the operations of mutation and crossover. In the simulation, the parameters including the population size and the probability for mutation and crossover were set the same as in [
42];
FBFP: the fixed beamwidth and fixed power strategy, in which the beamwidths and transmit power of all the D2D pairs are both fixed to a constant value and not varied with time;
Reference [
10]: Joint Optimization of the EH Time Ratio and Beamwidth (JOETRB). However, the interference between users was ignored, and the power optimization was not considered.
It is worth noting that ES, PSO, and the GA were only used in the beamwidth selection phase in our benchmark schemes. In the phase for optimizing and of the two algorithms, our proposed power optimization and time scheduling algorithm were adopted. The convergence analysis of ES, PSO, and the GA combined with the proposed power optimization and time scheduling was similar to our proposed algorithm; hence, we omit it here. It should also be noted that all the following tables and curves are the average result of 100 independent experiments.
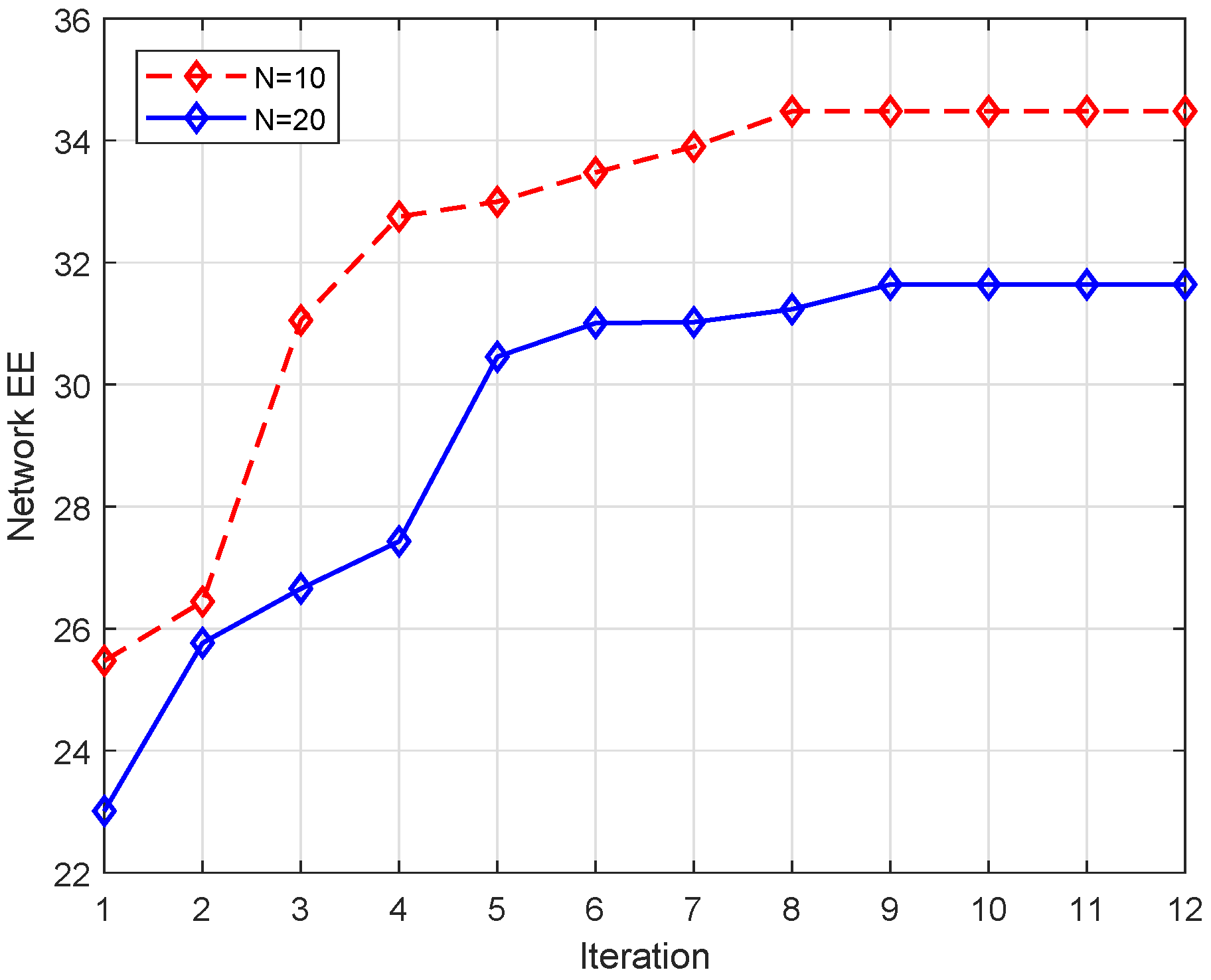
In
Figure 3, fixing
and the threshold of convergence
to
, we show the convergence behavior of the proposed algorithm. Under
, the proposed algorithm can converged within seven iterations. When the number of DU was increased to two, the number of iteration to converge was slightly increased to nine. This indicates that our proposed algorithm can converge within a small number of iterations and the fast convergence speed of the proposed algorithm is verified.
In
Table 2, we list the time complexity of the posed CG, PSO, GA and ES, where
and
denote the population size for PSO and Ga,
and
denote the maximum number of iterations to converge for PSO and GA. It can be seen that the proposed CG greatly reduced the complexity compared with ES, which had exponential complexity. Generally speaking, the execution of PSO and the GA required a large population and number iterations to converge. Therefore, the complexity of the proposed CG also outperformed PSO and the GA.
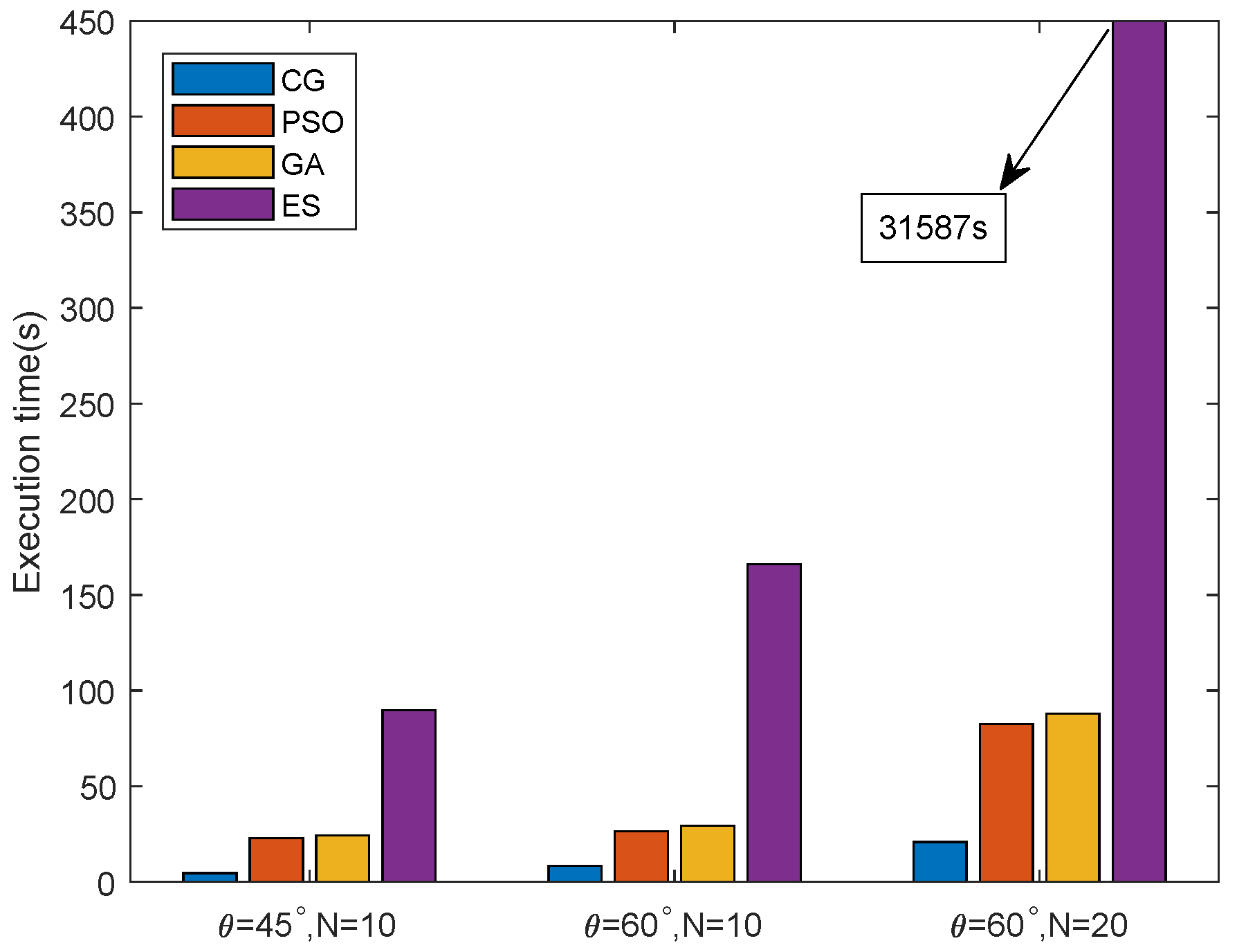
In
Figure 4, we study the MATLAB software running time of the beam alignment phase of the algorithms under different
and
N, to compare the time complexity of the proposed algorithm with ES and PSO. Obviously, the total time for the convergence of CG under different settings was much shorter than PSO and ES. For all the algorithms, when
increased from
to
, the required time to converge increased due to the expansion of the search range for the beamwidth. The figure also shows that when the number of DUs increased from 10 to 20, the time to converge for PSO under
increased from 26.44 s to 82.54 s, the time to converge for the GA increased from 29.36 s to 87.94 s, while for CG, under
, the convergence time only increased from 8.29 s to 20.63 s. Among the three algorithms, ES showed the worst-case scenario. As every candidate combination of beamwidths for the DUs needed to be evaluated, the total running time for ES was unacceptably long. Moreover, our proposed algorithm could obtain better performance than PSO. As a great number of candidate solutions needed to be evaluated and updated, the total time for PSO and the GA to converge was far over CG. Hence, the superiority of the CG-based beamwidth selection algorithm with regard to time complexity was verified. The proposed algorithm can obtain the beamwidths for the DUs in a short time, thus effectively increasing the transmission time.
Next, we evaluated the EE performance comparing the proposed algorithm with the benchmark schemes. To find the parameters that may affect the network EE, we compared the network EE versus the number of DUs N, the number of CUs M, the maximum power for DU , the minimum harvested power , and the minimum rate for CU , respectively.
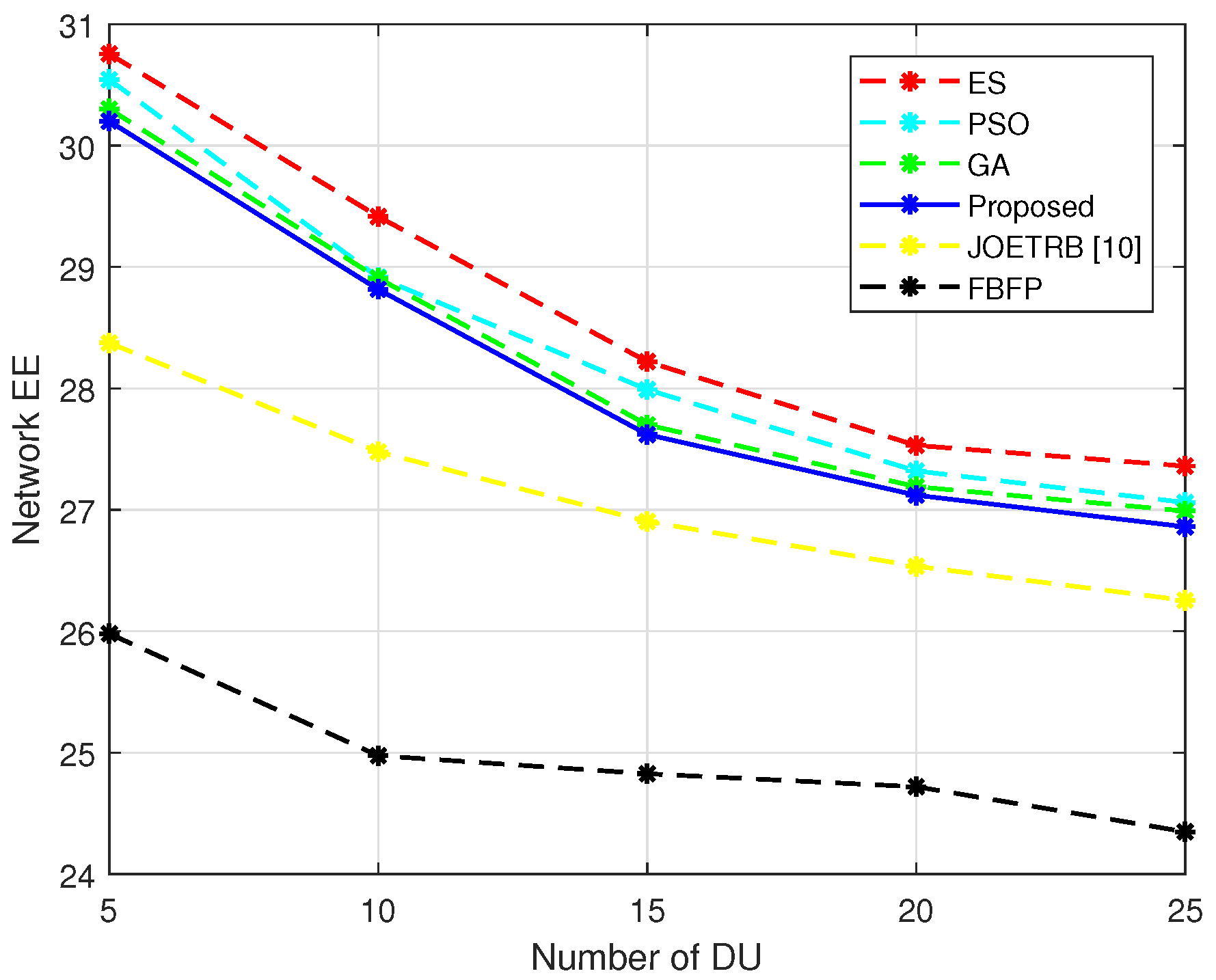
In
Figure 5, we fix
and plot the network EE versus the number of D2D links, comparing the proposed algorithm with the benchmark schemes under different
N. It can be seen that the proposed algorithm can achieve better performance than FBFP and a performance near PSO and ES. The beamwidth selection and power control in our algorithm were designed to improve the network EE, and the EH time ratio optimization could further increase the EE. Another observation is that the network EE decreased with
N. The reason lied in that although the narrow beams were adopted for the DUs, more D2D transmitters would potentially increase the interference between the DUs, thus degrading the transmission rate of the DUs, which degrades the network EE. A similar observation can be found by comparing the EE of the JOETRB [
10] and FBFP algorithms under different
N. However, it can be seen that the EE for the JOETRB [
10] and FBFP sharply decreased when
N exceeded 15, while our proposed algorithm still maintained a good level thanks to the dynamic adjustment of the beamwidths, power levels, and EH time ratio for the DUs.
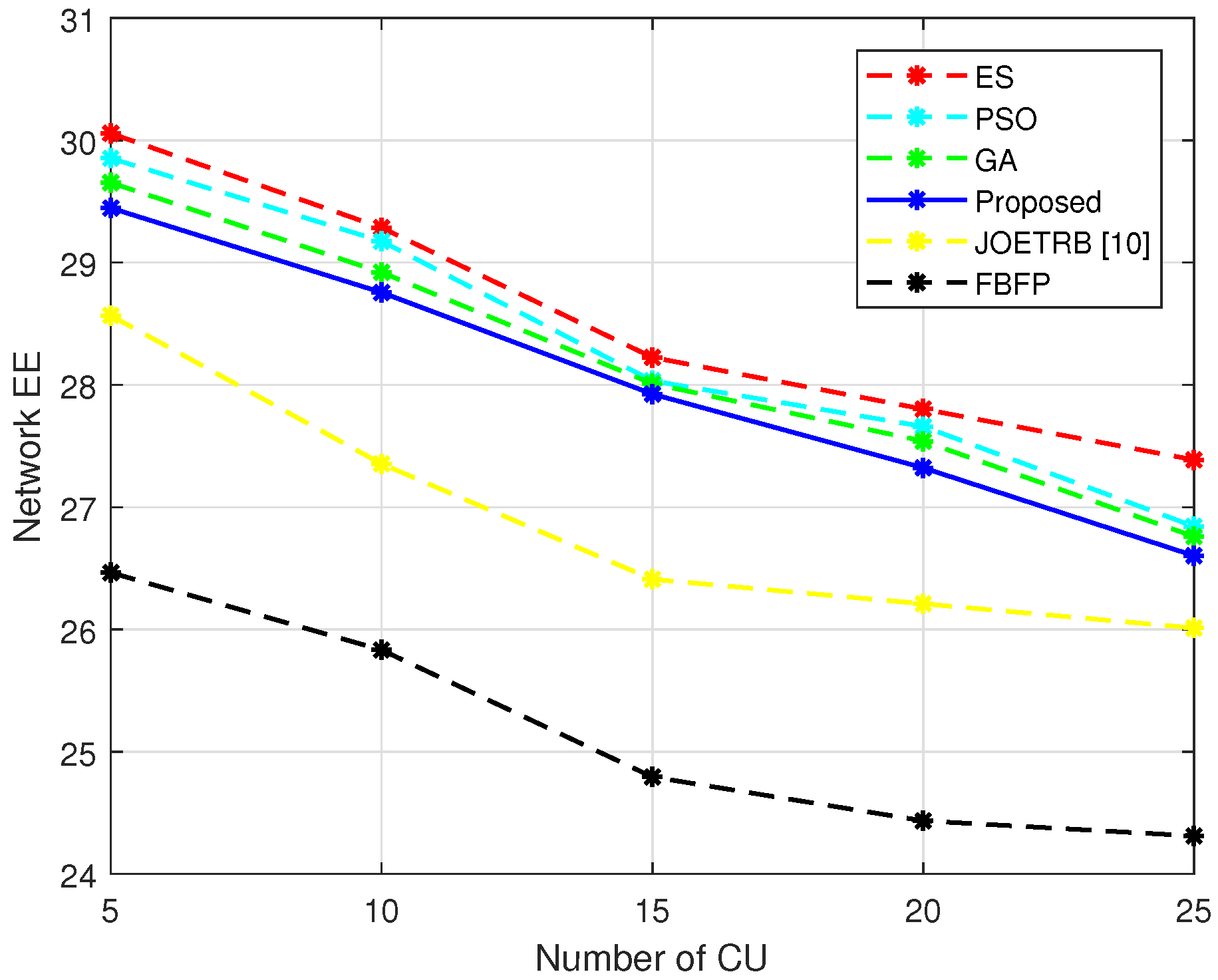
In
Figure 6, we plot the network EE versus different numbers of CUs to compare the performance of the proposed algorithm with ES and FBFP under different
M. It can be seen from the figure that the energy efficiency of the proposed algorithm and the benchmark schemes decreased with the increase of
M. The reason was that the growing of
M led to the increased interference from the CU, i.e.,
. At the same time, in order to meet the minimum rate constraint for the CUs, the DUs had to strictly control the transmit power, which degraded the transmission rate for the DUs. Although the growth in the number of CUs provided more energy for the DUs to harvest, it also led to the decrease of the user rate, which significantly impacted the EE. Therefore, in a heterogeneous network where CUs and DUs coexist and share the spectrum resources, the EE performance of the DUs will be degraded when the number of CUs increases. It can be seen from the figure that the performance of the proposed algorithm still approached PSO, the GA, and ES and outperformed the JOETRB [
10] and FBFP strategies, which further verified the effectiveness of the proposed algorithm.
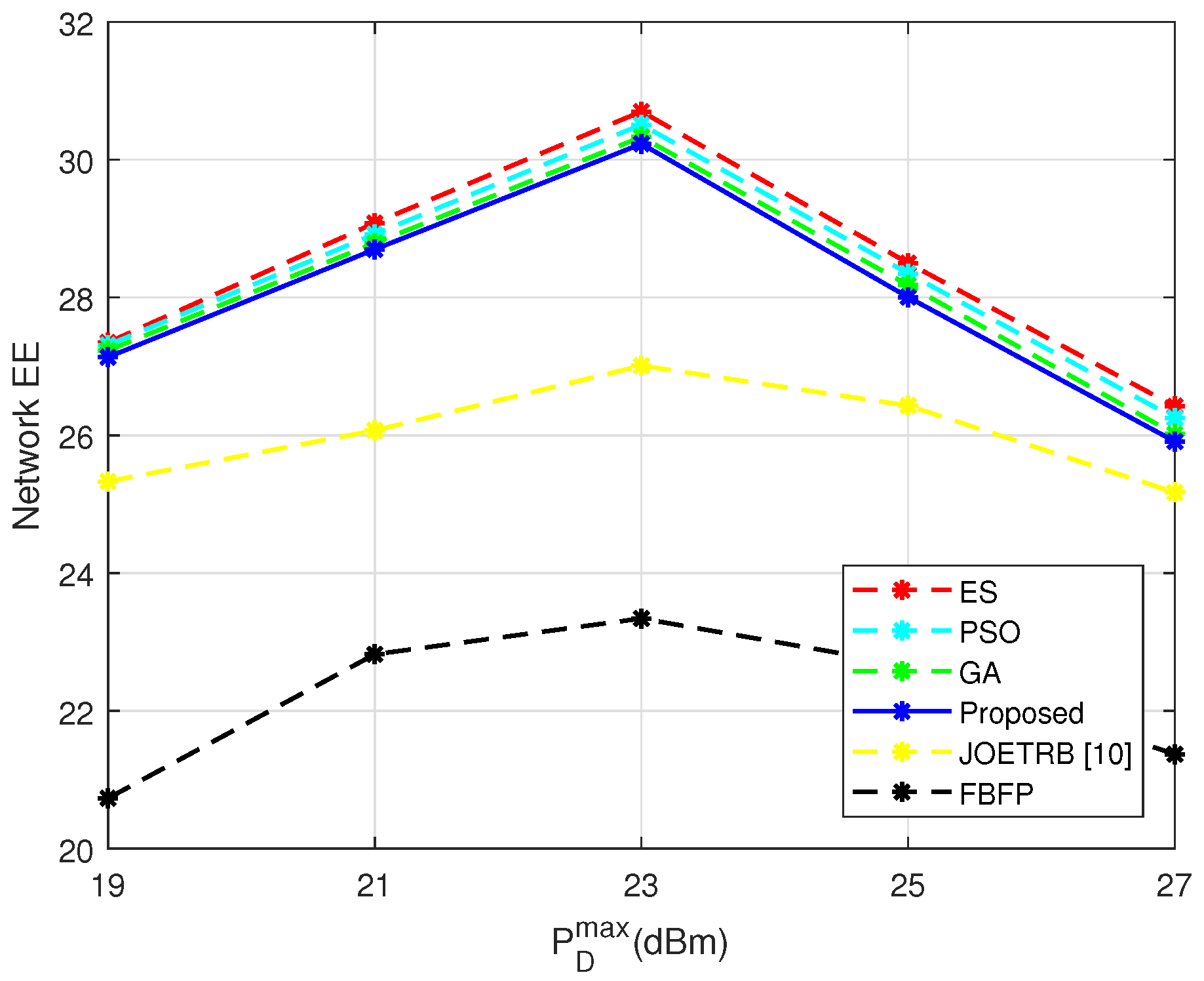
In
Figure 7, we change the maximum transmission power of the DU and plot the curve of EE. With the increasing of
, some users in the network would increase their power to improve the user rate. Therefore, the EE first increased with
. However, due to the existence of a minimum rate for the CU
, the EE did not always increase, but was upper bounded by a certain value. When
increased from 19 dBm to 23 dBm, the network EE increased. However, the EE began to fall when
was further increased to 25 dBm. In addition, we also set the fixed power under the JOETRB [
10] and FBFP to
to find the relationship between the EE and
under FBFP, and a similar finding could be obtained. Hence, we can reach the conclusion that the network EE was closely related to the transmit power of the DUs and first increased, then decreased with
.
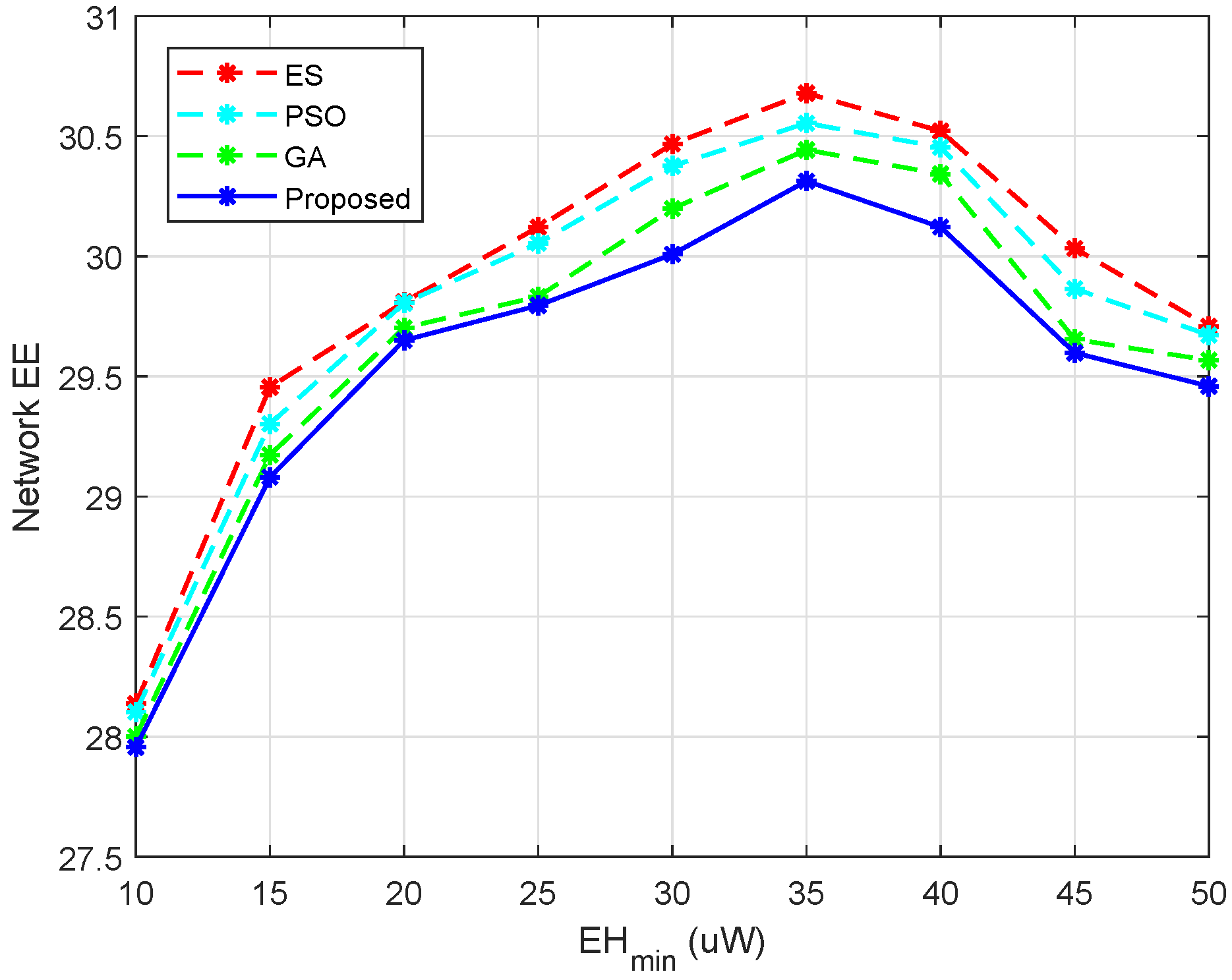
In
Figure 8, we evaluate the effect of
on the network EE. As
increased, the network EE gradually increased, which can be seen from the curves of the proposed algorithm, PSO, and ES. However, with the further growing of
, the network EE no longer had unlimited growth. The reason was that the increased
required the DUs to harvest more energy, so the DUs were more inclined to increase the power and increase the EH time ratio
. However, the EE will not monotonically increase with the EH time ratio, because with more energy harvested, less energy will be consumed and the user rate will decrease at the same time due to the reduction of the effective transmission time. Moreover, due to the existence of the
, the power of the DUs was also limited. It can be seen that the proposed algorithm could achieve a performance close to PSO, the GA, and ES.
In
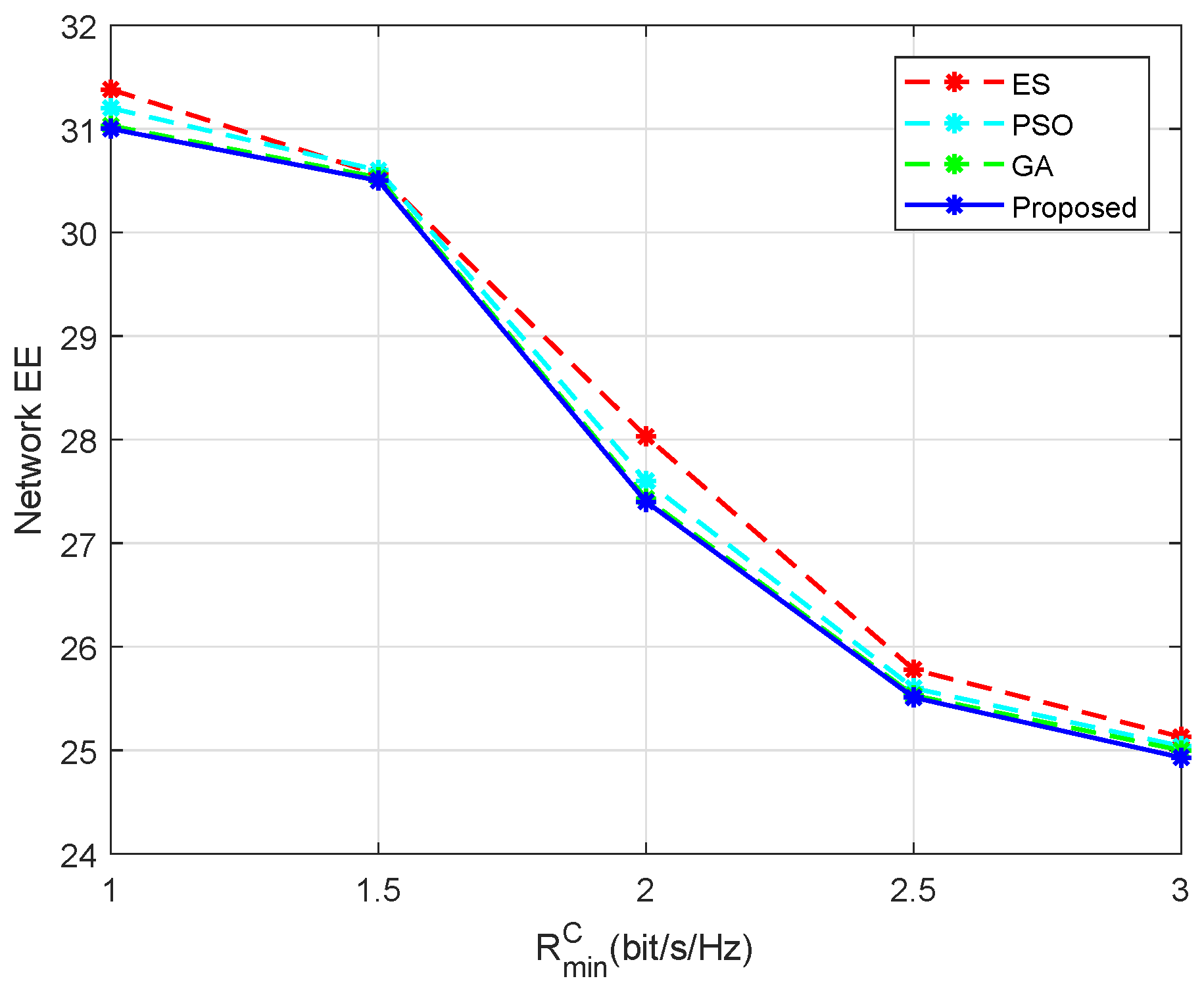
Figure 9, we plot the network EE under different
. As
increased, the EE of all three algorithms decreased. The reason was that when
increased, the DUs had to decrease their transmission power to reduce the interference to the CUs, so as to meet the rate requirement of the CUs. By comparing the performance of the three algorithms, a similar conclusion can be drawn that the proposed algorithm can achieve a close performance to PSO, the GA, and ES.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}