
Prediction Method of Soft Fault and Service Life of DC-DC-Converter Circuit Based on Improved Support Vector Machine


Abstract
:1. Introduction
2. Fault Prediction Model
2.1. Model Initialization
2.2. Online Model Updates
- (1)
- Adding samples
- (2)
- Removing samples
2.3. Adaptive Selection of the Sliding-Time-Window Length
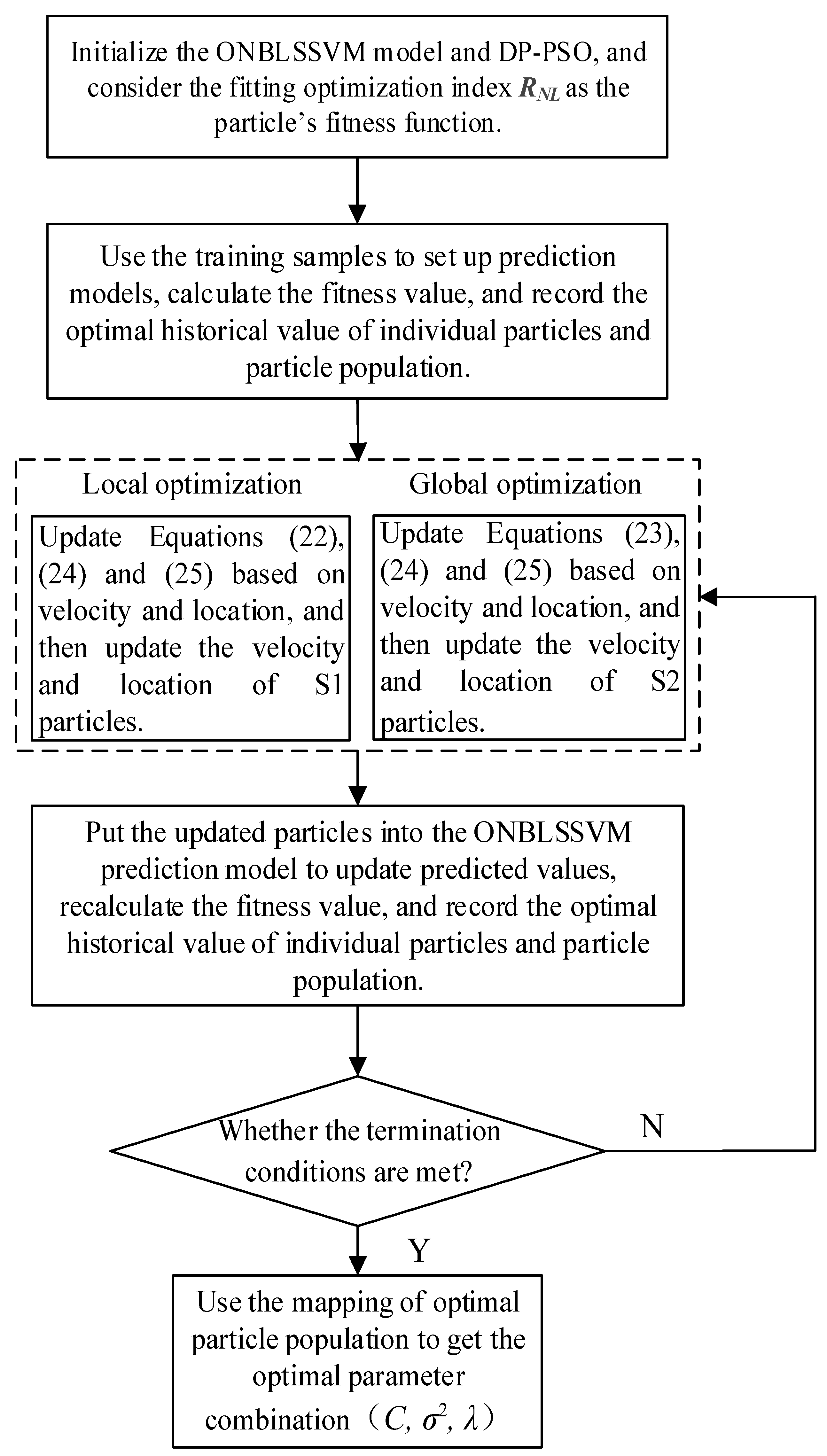
2.4. Optimized Computation of Model Parameters Based on DP-PSO
3. Simulation Experiments and Result Analyses
3.1. Establishment of Degradation Models for Key Components
- (1)
- Performance-Degradation Model of Electrolytic Capacitor
- (2)
- Performance-Degradation Model of Power MOSFET
- (3)
- Performance-Degradation Model of Inductor
- (4)
- Performance-Degradation Model of Power Diode
3.2. Selection of Characteristic Parameters for Circuit-Level Faults
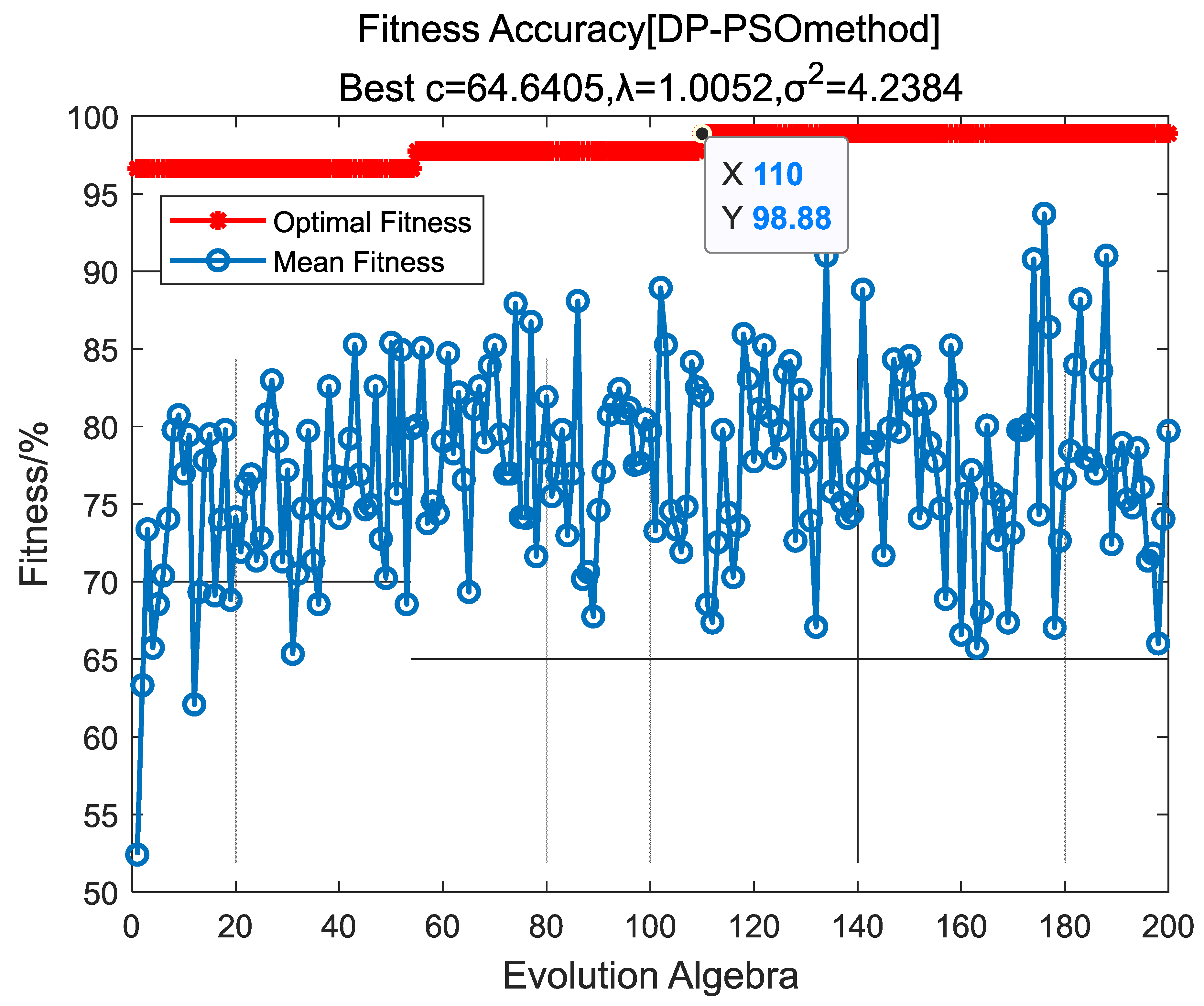
3.3. Determination of Parameters for the Prediction Model
3.4. Testing of Prediction-Model Performance
- (1)
- Testing of the Prediction Efficiency of the Model
- (2)
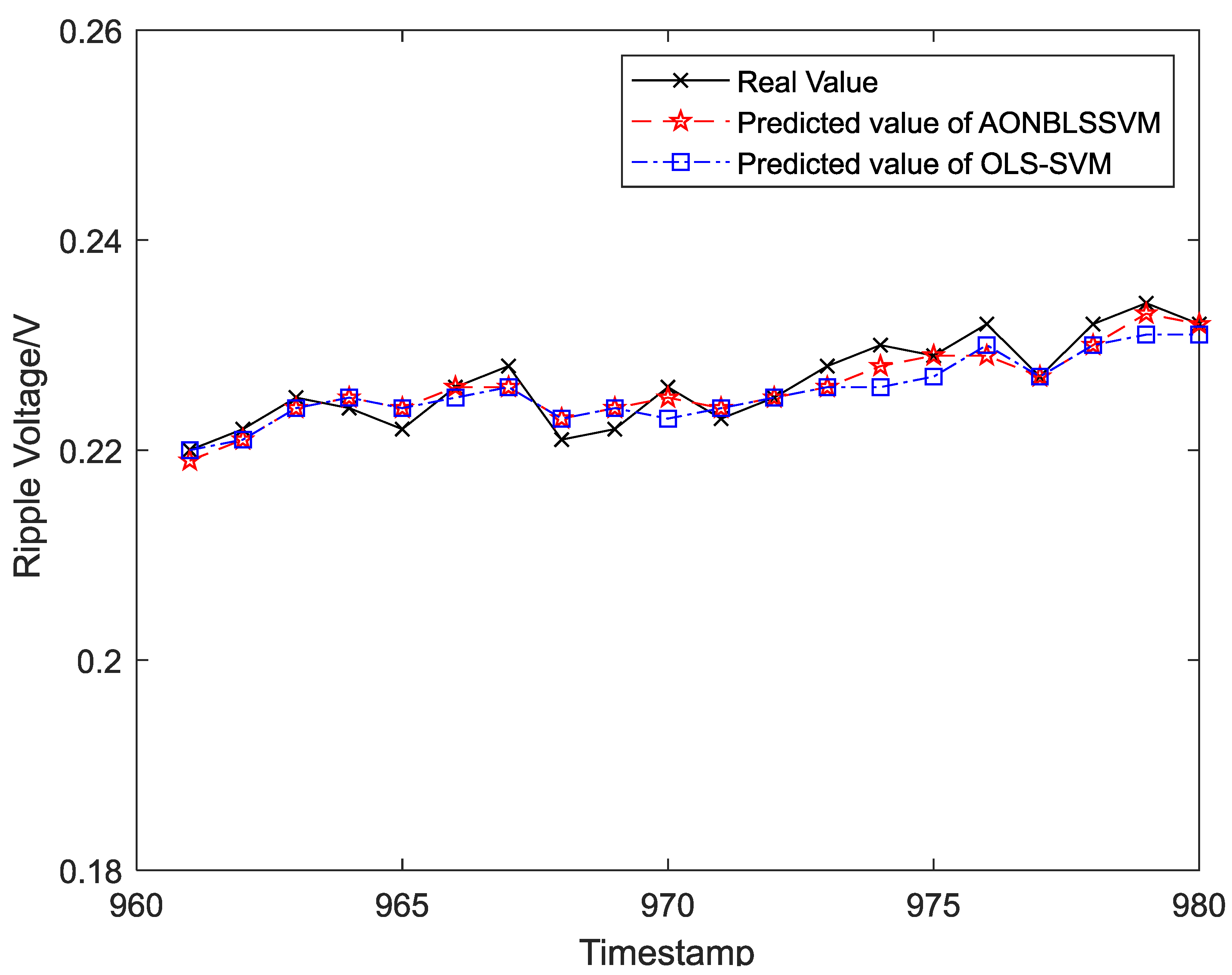
- Testing of Prediction Accuracy of the Model
3.5. Analysis of Simulation Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| DC–DC | Direct Current to Direct Current |
| AONBLSSVM | Adaptive Online Non-bias Least-Square Support-Vector Machine |
| DP-PSO | Double-Population Particle-Swarm Optimization |
| OLS-SVM | Online Least-Square Support-Vector Machine |
| MOSFET | Metal-Oxide-Semiconductor Field-Effect Transistor |
| IGBT | Insulated Gate Bipolar Translator |
| Rc | Equivalent-Series Resistance |
| Average Power Loss of Capacitor | |
| IC | Effective Value of Capacitive Current |
| Cvalue | Capacity of Capacitor |
| SISO | Single Input–Single Output |
| MISO | Multiple Input–Single Output |
| CCM | Continuous Conduction Mode |
| DCM | Discontinuous Conduction Mode |
| Ron | Drain-source On-resistance of Metal-Oxide-Semiconductor Field-Effect Transistor |
| SVM | Support-Vector Machine |
| LSSVM | Least-Square Support-Vector Machine |
| ONBLSSVM | Online Non-bias Least-Square Support-Vector Machine |
| KKT conditions | Karush–Kuhn–Tucker conditions |
| C | Penalty Factor |
| Introduced Parameter | |
| Gaussian Kernel Function Breadth Factor | |
| Prediction-Error Threshold | |
| Refers to The Relative Decrement Threshold | |
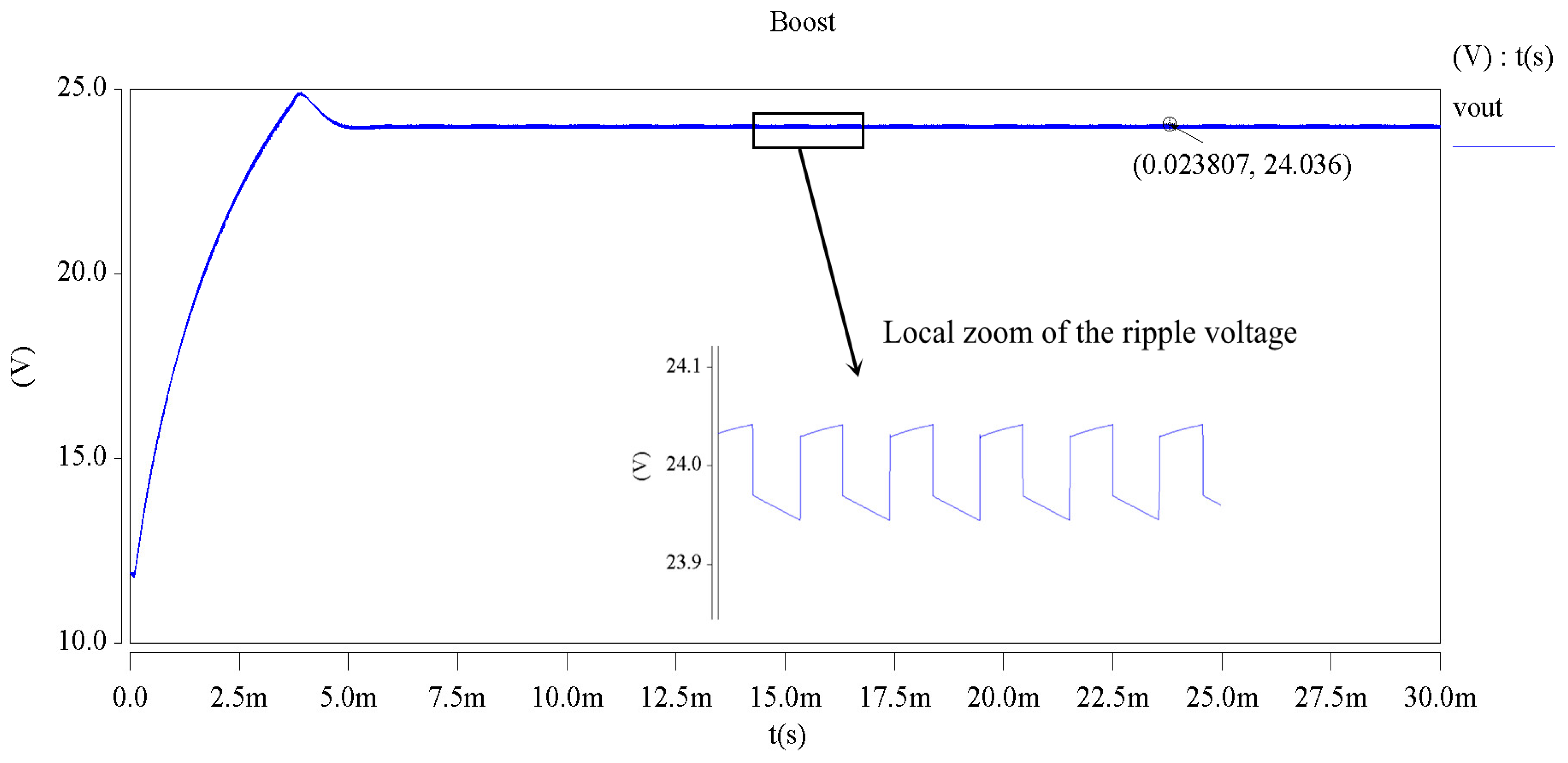
| Vout | Output Voltage of Direct Current to Direct Current |
| Pout | Output Power of Direct Current to Direct Current |
| Upp | Ripple Voltage |
| t | Time |
| ∆t | Time Interval |
| MAD | Mean Average Deviation |
| MAPE | Mean Average Percentage Error |
| Theil IC | Theil’s Inequality Coefficient |
References
- Gautam, P.V.; Kushwaha, H.; Kumar, A.; Kumar, D. Mechatronics Application in Precision Sowing: A Review. Int. J. Curr. Microbiol. Appl. Sci. 2019, 8, 1793–1807. [Google Scholar] [CrossRef]
- Lian, Z.; Wang, J.; Yang, Z.; Shang, S. Development of plot-sowing mechanization in China. Trans. Chin. Soc. Agric. Eng. 2012, 28, 140–145. [Google Scholar]
- Vichare, N.M.; Pecht, M.G. Prognostics and health management of electronics. IEEE Trans. Compon. Packag. Technol. 2006, 29, 222–229. [Google Scholar] [CrossRef]
- Saha, S.; Celaya, J.R.; Vashchenko, V.; Mahiuddin, S.; Goebel, K.F. Accelerated aging with electrical overstress and prognostics for power MOSFETs. In Proceedings of the IEEE 2011 EnergyTech, Cleveland, OH, USA, 25–26 May 2011; pp. 1–6. [Google Scholar]
- Patil, N.; Celaya, J.; Das, D.; Goebel, K.; Pecht, M. Precursor Parameter Identification for Insulated Gate Bipolar Transistor (IGBT) Prognostics. IEEE Trans. Reliab. 2009, 58, 271–276. [Google Scholar] [CrossRef]
- Zhou, Y.; Ye, X.; Zhai, G. Degradation model and maintenance strategy of the electrolytic capacitors for electronics applications. In Proceedings of the 2011 Prognostics and System Health Management Conference, Shenzhen, China, 24–25 May 2011; pp. 1–6. [Google Scholar]
- Ren, L.; Gong, C.; Zhao, Y. An Online ESR Estimation Method for Output Capacitor of Boost Converter. IEEE Trans. Power Electron. 2019, 34, 10153–10165. [Google Scholar] [CrossRef]
- Dusmez, S.; Heydarzadeh, M.; Nourani, M.; Akin, B. Remaining Useful Lifetime Estimation for Power MOSFETs Under Thermal Stress With RANSAC Outlier Removal. IEEE Trans. Ind. Inform. 2017, 13, 1271–1279. [Google Scholar] [CrossRef]
- Li, Z.; Zheng, Z.; Outbib, R. A prognostic methodology for power MOSFETs under thermal stress using echo state network and particle filter. Microelectron. Reliab. 2018, 88–90, 350–354. [Google Scholar] [CrossRef] [Green Version]
- Duan, X.; Zou, J.; Li, B.; Wu, Z.; Lei, D. An Online Monitoring Scheme of Output Capacitor’s Equivalent Series Resistance for Buck Converters Without Current Sensors. IEEE Trans. Ind. Electron. 2020, 68, 10107–10117. [Google Scholar] [CrossRef]
- Tang, S.; Dong, S.; Liu, Y.; Zhang, Q. Current-sensorless online ESR monitoring of capacitors in boost converter. J. Eng. 2019, 2019, 2569–2574. [Google Scholar] [CrossRef]
- Lu, W.G.; Lu, X.; Han, J.; Zhao, Z.; Du, X. Online Estimation of ESR for DC-Link Capacitor of Boost PFC Converter Using Wavelet Transform Based Time–Frequency Analysis Method. IEEE Trans. Power Electron. 2019, 35, 7755–7764. [Google Scholar] [CrossRef]
- Rodríguez-Blanco, M.A.; Cervera-Cevallos, M.; Vázquez-Ávila, J.L.; Islas-Chuc, M.S. Fault detection methodology for the IGBT based on measurement of collector transient current. In Proceedings of the 2018 14th International Conference on Power Electronics (CIEP), Cholula, Puebla, Mexico, 24–26 October 2018. [Google Scholar]
- Li, X.; Xu, D.; Zhu, H.; Cheng, X.; Yu, Y.; Ng, W.T. Indirect IGBT Over-Current Detection Technique Via Gate Voltage Monitoring and Analysis. IEEE Trans. Power Electron. 2018, 34, 3615–3622. [Google Scholar] [CrossRef]
- XSun, X.; Huang, M.; Liu, Y.; Zha, X. Investigation of artificial neural network algorithm based IGBT online condition monitoring. Microelectron. Reliab. 2018, 88–90, 103–106. [Google Scholar]
- Dusmez, S.; Bhardwaj, M.; Sun, L.; Akin, B. A software frequency response analysis method to monitor degradation of power MOSFETs in basic single-switch converters. In Proceedings of the 2016 IEEE Applied Power Electronics Conference and Exposition (APEC), Long Beach, CA, USA, 20–24 March 2016; pp. 505–510. [Google Scholar]
- Dusmez, S.; Bhardwaj, M.; Sun, L.; Akin, B. In Situ Condition Monitoring of High-Voltage Discrete Power MOSFET in Boost Converter Through Software Frequency Response Analysis. IEEE Trans. Ind. Electron. 2016, 63, 7693–7702. [Google Scholar] [CrossRef]
- Wu, Y.; Wang, Y.; Jiang, Y.; Sun, Q. Multiple parametric faults diagnosis for power electronic circuits based on hybrid bond graph and genetic algorithm. Measurement 2016, 92, 365–381. [Google Scholar] [CrossRef]
- Sun, Q.; Wang, Y.; Jiang, Y.; Wu, Y. Online component-level soft fault diagnostics for power converters. In Proceedings of the 2016 Prognostics and System Health Management Conference (PHM-Chengdu), Chengdu, China, 19–21 October 2016; pp. 1–5. [Google Scholar]
- Sun, Q.; Wang, Y.; Jiang, Y.; Shao, L. Condition Monitoring and Prognosis of Power Converters Based on CSA-LSSVM. In Proceedings of the 2017 International Conference on Sensing, Diagnostics, Prognostics, and Control (SDPC), Shanghai, China, 16–18 August 2017; pp. 524–529. [Google Scholar]
- Chen, C.; Ye, X.; Wang, H.; Zhai, G.; Wan, R. In-situ prognostic method of power MOSFET based on miller effect. In Proceedings of the 2017 Prognostics and System Health Management Conference (PHM-Harbin), Harbin, China, 9–12 July 2017; pp. 1–5. [Google Scholar]
- Sastry, A.; Kulasekaran, S.; Flicker, J.; Ayyanar, R.; TamizhMani, G.; Roy, J.; Srinivasan, D.; Tilford, I. Failure modes and effect analysis of module-level power electronics. In Proceedings of the 2015 IEEE 42nd Photovoltaic Specialist Conference (PVSC), New Orleans, LA, USA, 14–19 June 2015; pp. 1–3. [Google Scholar]
- Long, B.; Xian, W.; Li, M.; Wang, H. Improved diagnostics for the incipient faults in analog circuits using LSSVM based on PSO algorithm with Mahalanobis distance. Neurocomputing 2014, 133, 237–248. [Google Scholar] [CrossRef]
- Kordestani, M.; Samadi, M.F.; Saif, M.; Khorasani, K. A New Fault Prognosis of MFS System Using Integrated Extended Kalman Filter and Bayesian Method. IEEE Trans. Ind. Inform. 2018. [Google Scholar] [CrossRef]
- Wan, M.; Wang, Z.; Si, L.; Tan, C.; Wang, H. An Initial Alignment Technology of Shearer Inertial Navigation Positioning Based on a Fruit Fly-Optimized Kalman Filter Algorithm. Comput. Intell. Neurosci. 2020, 2020, 8876918. [Google Scholar] [CrossRef]
- Boškoski, P.; Gašperin, M.; Petelin, D.; Juričić, Đ. Bearing fault prognostics using Rényi entropy-based features and Gaussian process models. Mech. Syst. Signal Processing 2015, 52, 327–337. [Google Scholar] [CrossRef]
- Chen, N.; Yu, R.; Chen, Y.; Xie, H. Hierarchical method for wind turbine prognosis using SCADA data. IET Renew. Power Gener. 2017, 11, 403–410. [Google Scholar] [CrossRef]
- Elforjani, M.; Shanbr, S. Prognosis of Bearing Acoustic Emission Signals Using Supervised Machine Learning. IEEE Trans. Ind. Electron. 2018, 65, 5864–5871. [Google Scholar] [CrossRef] [Green Version]
- Javed, K.; Gouriveau, R.; Zerhouni, N. A New Multivariate Approach for Prognostics Based on Extreme Learning Machine and Fuzzy Clustering. IEEE Trans. Cybern. 2015, 45, 2626–2639. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shang, S.; He, K.-N.; Wang, Z.-B.; Yang, T.; Liu, M.; Li, X. Sea Clutter Suppression Method of HFSWR Based on RBF Neural Network Model Optimized by Improved GWO Algorithm. Comput. Intell. Neurosci. 2020, 2020, 8842390. [Google Scholar] [CrossRef] [PubMed]
- Li, G.; Ma, X.; Yang, H. A Hybrid Model for Forecasting Sunspots Time Series Based on Variational Mode Decomposition and Backpropagation Neural Network Improved by Firefly Algorithm. Comput. Intell. Neurosci. 2018, 2018, 3713410. [Google Scholar] [CrossRef] [PubMed]
- Gao, Q.; Ma, P. Graph Neural Network and Context-Aware Based User Behavior Prediction and Recommendation System Research. Comput. Intell. Neurosci. 2020, 2020, 8812370. [Google Scholar] [CrossRef]
- Daroogheh, N.; Baniamerian, A.; Meskin, N.; Khorasani, K. Prognosis and Health Monitoring of Nonlinear Systems Using a Hybrid Scheme Through Integration of PFs and Neural Networks. IEEE Trans. Syst. Man, Cybern. Syst. 2016, 47, 1990–2004. [Google Scholar] [CrossRef]
- Haque, M.S.; Choi, S.; Baek, J. Auxiliary Particle Filtering-Based Estimation of Remaining Useful Life of IGBT. IEEE Trans. Ind. Electron. 2017, 65, 2693–2703. [Google Scholar] [CrossRef]
- Tang, H.; Li, D.; Chen, W.; Xue, S. Uncertainty quantification using evidence theory in concrete fatigue damage prognosis. In Proceedings of the 2016 IEEE International Conference on Prognostics and Health Management (ICPHM), Ottawa, ON, Canada, 20–22 June 2016; pp. 1–7. [Google Scholar]
- Yang, Y.; Xue, D. Modified grey model predictor design using optimal fractional-order accumulation calculus. IEEE/CAA J. Autom. Sin. 2017, 4, 724–733. [Google Scholar] [CrossRef]
- Chen, L.; Tian, B.; Lin, W.; Ji, B.; Li, J.; Pan, H. Analysis and prediction of the discharge characteristics of the lithium–ion battery based on the Grey system theory. IET Power Electron. 2015, 8, 2361–2369. [Google Scholar] [CrossRef] [Green Version]
- Liu, T.; Zhu, K.; Zeng, L. Diagnosis and Prognosis of Degradation Process via Hidden Semi-Markov Model. IEEE/ASME Trans. Mechatron. 2018, 23, 1456–1466. [Google Scholar] [CrossRef]
- TKlingelschmidt, T.; Weber, P.; Simon, C.; Theilliol, D.; Peysson, F. Fault diagnosis and prognosis by using Input-Output Hidden Markov Models applied to a diesel generator. In Proceedings of the 2017 25th Mediterranean Conference on Control and Automation (MED), Valletta, Malta, 3–6 July 2017; pp. 1326–1331. [Google Scholar]
- Liu, Y.; Shuai, Q.; Zhou, S.; Tang, J. Prognosis of Structural Damage Growth Via Integration of Physical Model Prediction and Bayesian Estimation. IEEE Trans. Reliab. 2017, 66, 700–711. [Google Scholar] [CrossRef]
- Hu, X.; Jiang, J.; Cao, D.; Egardt, B. Battery Health Prognosis for Electric Vehicles Using Sample Entropy and Sparse Bayesian Predictive Modeling. IEEE Trans. Ind. Electron. 2015, 63, 2645–2656. [Google Scholar] [CrossRef]
- Suykens, J.A.K.; Vandewalle, J. Least Squares Support Vector Machine Classifiers. Neural Process. Lett. 1999, 9, 293–300. [Google Scholar] [CrossRef]
- Suykens, J.A.; Lukas, L.; Vandewalle, J. Sparse approximation using least squares support vector machines. In Proceedings of the 2000 IEEE International Symposium on Circuits and Systems (ISCAS), Geneva, Switzerland, 28–31 May 2000; Volume 2. [Google Scholar]
- Suykens, J.; Vandewalle, J.; De Moor, B. Optimal control by least squares support vector machines. Neural Netw. 2001, 14, 23–35. [Google Scholar] [CrossRef]
- Li, J.; Ye, M.; Meng, W.; Xu, X.; Jiao, S. A Novel State of Charge Approach of Lithium Ion Battery Using Least Squares Support Vector Machine. IEEE Access 2020, 8, 195398–195410. [Google Scholar] [CrossRef]
- Cheng, R.; Song, Y.; Chen, D.; Chen, L. Intelligent Localization of a High-Speed Train Using LSSVM and the Online Sparse Optimization Approach. IEEE Trans. Intell. Transp. Syst. 2017, 18, 2071–2084. [Google Scholar] [CrossRef]
- Kong, W.; Ding, J. Online Learning Algorithm for LSSVM Based Modeling with Time-varying Kernels. IFAC-Pap. 2018, 51, 626–630. [Google Scholar] [CrossRef]
- Liu, X.; Wang, Q.; Huang, R.; Wang, S.; Liu, X. A prediction method for deck-motion based on online least square support vector machine and genetic algorithm. J. Mar. Sci. Technol. 2018, 24, 382–397. [Google Scholar] [CrossRef]
- Ardakani, M.H.; Escudero, G.; Graells, M.; Espuña, A. Sliding Dynamic Data Window: Improving Properties of the Incremental Learning Methods. Comput. Aided Chem. Eng. 2017, 40, 1663–1668. [Google Scholar]
- Shao, S.; Xu, G.; Li, M.; Huang, G.Q. Synchronizing e-commerce city logistics with sliding time windows. Transp. Res. Part E Logist. Transp. Rev. 2019, 123, 17–28. [Google Scholar] [CrossRef]
- Youn, J.; Shim, J.; Lee, S.-G. Efficient Data Stream Clustering With Sliding Windows Based on Locality-Sensitive Hashing. IEEE Access 2018, 6, 63757–63776. [Google Scholar] [CrossRef]
- Song, X.; Zhao, J.; Song, J.; Dong, F.; Xu, L.; Zhao, J. Local Demagnetization Fault Recognition of Permanent Magnet Synchronous Linear Motor Based on S-Transform and PSO–LSSVM. IEEE Trans. Power Electron. 2020, 35, 7816–7825. [Google Scholar] [CrossRef]
- Liu, H.-H.; Chang, L.-C.; Li, C.-W.; Yang, C.-H. Particle Swarm Optimization-Based Support Vector Regression for Tourist Arrivals Forecasting. Comput. Intell. Neurosci. 2018, 2018, 6076475. [Google Scholar] [CrossRef] [PubMed]
- Cho, M.-Y.; Hoang, T.T. Feature Selection and Parameters Optimization of SVM Using Particle Swarm Optimization for Fault Classification in Power Distribution Systems. Comput. Intell. Neurosci. 2017, 2017, 4135465. [Google Scholar] [CrossRef] [PubMed]
- Qi, Y.; Ding, F.; Xu, F.; Yang, J. Channel and Feature Selection for a Motor Imagery-Based BCI System Using Multilevel Particle Swarm Optimization. Comput. Intell. Neurosci. 2020, 2020, 8890477. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, X.-H.; Wang, L.-Z.; Hu, X.-F.; Fan, W.-H. Research on electric vehicle (EV) driving range prediction method based on PSO-LSSVM. In Proceedings of the 2017 IEEE International Conference on Prognostics and Health Management (ICPHM), Dallas, TX, USA, 19–21 June 2017; pp. 260–265. [Google Scholar]
- Li, B.; Tian, X. An Effective PSO-LSSVM-Based Approach for Surface Roughness Prediction in High-Speed Precision Milling. IEEE Access 2021, 9, 80006–80014. [Google Scholar] [CrossRef]
- Sarayloo, M.; Gambi, E.; Spinsante, S. A New Approach to Sequence Construction With Good Correlation by Particle Swarm Optimization. J. Commun. Softw. Syst. 2015, 11, 127–135. [Google Scholar] [CrossRef]
- Elmasry, W.; Akbulut, A.; Zaim, A.H. Evolving deep learning architectures for network intrusion detection using a double PSO metaheuristic. Comput. Netw. 2019, 168, 107042. [Google Scholar] [CrossRef]
- Bangyal, W.H.; Hameed, A.; Alosaimi, W.; Alyami, H. A New Initialization Approach in Particle Swarm Optimization for Global Optimization Problems. Comput. Intell. Neurosci. 2021, 2021, 6628889. [Google Scholar] [CrossRef]
- Bilal; Rani, D.; Pant, M.; Jain, S.K. Dynamic programming integrated particle swarm optimization algorithm for reservoir operation. Int. J. Syst. Assur. Eng. Manag. 2020, 11, 515–529. [Google Scholar] [CrossRef]
- Tian, Y.; Tang, A.; Yu, Y. Transmission model and statistical analysis for indoor wireless sensor network channels. J. Control Decis. 2014, 29, 1135–1138. (In Chinese) [Google Scholar]
- Lahyani, A.; Venet, P.; Grellet, G.; Viverge, P.-J. Failure prediction of electrolytic capacitors during operation of a switchmode power supply. IEEE Trans. Power Electron. 1998, 13, 1199–1207. [Google Scholar] [CrossRef]
- Celaya, J.R.; Kulkarni, C.S.; Biswas, G.; Goebel, K. Towards a model-based prognostics methodology for electrolytic capacitors: A case study based on electrical overstress accelerated aging. Int. J. Progn. Health Manag. 2012, 3, 33. [Google Scholar] [CrossRef]
- Celaya, J.R.; Kulkarni, C.S.; Biswas, G.; Saha, S.; Goebel, K. A model-based prognostics methodology for electrolytic capacitors based on electrical overstress accelerated aging. In Proceedings of the Annual Conference of the PHM Society, Montreal, QC, Canada, 25–29 September 2011; Volume 3, p. 1. [Google Scholar]
- Kulkarni, C.S.; Celaya, J.R.; Biswas, G.; Goebel, K. Accelerated aging experiments for capacitor health monitoring and prognostics. In Proceedings of the 2012 IEEE AUTOTESTCON Proceedings, Anaheim, CA, USA, 10–13 September 2012; pp. 356–361. [Google Scholar]
- Celaya, J.R.; Saxena, A.; Kulkarni, C.S.; Saha, S.; Goebel, K. Prognostics approach for power MOSFET under thermal-stress aging. In Proceedings of the 2012 Proceedings Annual Reliability and Maintainability Symposium, Reno, NV, USA, 23–26 January 2012; pp. 1–6. [Google Scholar]
- Fukuda, Y.; Inoue, T.; Mizoguchi, T.; Yatabe, S.; Tachi, Y. Planar inductor with ferrite layers for DC-DC converter. IEEE Trans. Magn. 2003, 39, 2057–2061. [Google Scholar] [CrossRef]
- Givi, H.; Farjah, E.; Ghanbari, T. A Comprehensive Monitoring System for Online Fault Diagnosis and Aging Detection of Non-Isolated DC–DC Converters’ Components. IEEE Trans. Power Electron. 2018, 34, 6858–6875. [Google Scholar] [CrossRef]
- Jiang, X.; Zhai, D.; Chen, J.; Yuan, F.; Li, Z.; He, Z.; Shen, Z.J.; Wang, J. Comparison Study of Surge Current Capability of Body Diode of SiC MOSFET and SiC Schottky Diode. In Proceedings of the 2018 IEEE Energy Conversion Congress and Exposition (ECCE), Portland, OR, USA, 23–27 September 2018; pp. 845–849. [Google Scholar]
- THirao, T.; Hashimoto, T.; Shirai, N.; Arai, H.; Matsuura, N.; Matsuura, H. Low reverse recovery charge 30-V power MOSFETs for DC-DC converters. In Proceedings of the 2013 25th International Symposium on Power Semiconductor Devices & IC’s (ISPSD), Kanazawa, Japan, 26–30 May 2013; pp. 221–224. [Google Scholar]
- Shankar, B.; Soni, A.; Shrivastava, M. Electro-Thermo-Mechanical Reliability of Recessed Barrier AlGaN/GaN Schottky Diodes Under Pulse Switching Conditions. IEEE Trans. Electron. Devices 2020, 67, 2044–2051. [Google Scholar] [CrossRef]
- Casey, M.C.; Lauenstein, J.-M.; Ladbury, R.L.; Wilcox, E.P.; Topper, A.D.; Label, K.A. Schottky Diode Derating for Survivability in a Heavy Ion Environment. IEEE Trans. Nucl. Sci. 2015, 62, 2482–2489. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time | ESR/Ω | C/uF | RON/Ω | RD/Ω | L/uH | UPP/V |
|---|---|---|---|---|---|---|
| 0 | 0.0200 | 1000.0000 | 0.0200 | 0.0100 | 33.00 | 0.092 |
| 1∆t | 0.0209 | 997.7493 | 0.0206 | 0.0101 | 32.56 | 0.098 |
| 2∆t | 0.0219 | 994.9920 | 0.0213 | 0.0103 | 32.12 | 0.106 |
| 3∆t | 0.0230 | 991.6141 | 0.0222 | 0.0105 | 31.68 | 0.112 |
| 4∆t | 0.0243 | 987.4759 | 0.0233 | 0.0108 | 31.24 | 0.120 |
| 5∆t | 0.0257 | 982.4064 | 0.0246 | 0.0112 | 30.80 | 0.138 |
| 6∆t | 0.0272 | 976.1958 | 0.0261 | 0.0118 | 30.36 | 0.147 |
| 7∆t | 0.0290 | 968.5874 | 0.0280 | 0.0126 | 29.92 | 0.161 |
| 8∆t | 0.0310 | 959.2666 | 0.0302 | 0.0139 | 29.48 | 0.173 |
| 9∆t | 0.0333 | 947.8479 | 0.0329 | 0.0156 | 29.04 | 0.198 |
| 10∆t | 0.0360 | 933.8591 | 0.0361 | 0.0180 | 28.60 | 0.236 |
| 11∆t | 0.0390 | 916.7219 | 0.0400 | 0.0215 | 28.16 | 0.263 |
| 12∆t | 0.0428 | 895.7276 | 0.0446 | 0.0264 | 27.72 | 0.291 |
| 13∆t | 0.0473 | 870.0080 | 0.0502 | 0.0334 | 27.28 | 0.350 |
| 14∆t | 0.0528 | 838.3950 | 0.0570 | 0.0433 | 26.84 | 0.433 |
| 15∆t | 0.0600 | 799.8997 | 0.0065 | 0.0574 | 26.40 | 0.546 |
| AONBLSSVM Prediction Model | |||
|---|---|---|---|
| Experiment No. | MAD | MAPE (%) | Theil IC |
| 1 | 0.95 × 10−3 | 7.796 × 10−1 | 4.747 × 10−3 |
| 2 | 1.00 × 10−3 | 6.561 × 10−1 | 4.017 × 10−3 |
| 3 | 1.20 × 10−3 | 5.300 × 10−1 | 3.278 × 10−3 |
| 4 | 1.30 × 10−3 | 5.410 × 10−1 | 3.219 × 10−3 |
| 5 | 1.45 × 10−3 | 5.088 × 10−1 | 3.248 × 10−3 |
| OLS-SVM Prediction Model | |||
|---|---|---|---|
| Experiment No. | MAD | MAPE (%) | Theil IC |
| 1 | 1.15 × 10−3 | 9.405 × 10−1 | 5.049 × 10−3 |
| 2 | 1.10 × 10−3 | 7.201 × 10−1 | 4.279 × 10−3 |
| 3 | 1.60 × 10−3 | 7.035 × 10−1 | 4.197 × 10−3 |
| 4 | 1.65 × 10−3 | 6.867 × 10−1 | 3.879 × 10−3 |
| 5 | 1.90 × 10−3 | 6.655 × 10−1 | 3.912 × 10−3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hou, Y.; Wu, Z.; Cai, X.; Dong, Z. Prediction Method of Soft Fault and Service Life of DC-DC-Converter Circuit Based on Improved Support Vector Machine. Entropy 2022, 24, 402. https://doi.org/10.3390/e24030402
Hou Y, Wu Z, Cai X, Dong Z. Prediction Method of Soft Fault and Service Life of DC-DC-Converter Circuit Based on Improved Support Vector Machine. Entropy. 2022; 24(3):402. https://doi.org/10.3390/e24030402
Chicago/Turabian StyleHou, Yuntao, Zequan Wu, Xiaohua Cai, and Zhongge Dong. 2022. "Prediction Method of Soft Fault and Service Life of DC-DC-Converter Circuit Based on Improved Support Vector Machine" Entropy 24, no. 3: 402. https://doi.org/10.3390/e24030402