
Exponential Families with External Parameters


{kind=link}
Abstract
:1. Introduction
Exponential Families in Statistical Thermodynamics
2. Statistical Models and Exponential Families
- 1.
- (injectivity) the map , is one to one,
- 2.
- (regularity) the d functions defined on Xare linearly independent as functions on X for every .
Exponential Family
3. Exponential Families Depending on External Control Parameters
3.1. Exponential Families with External Parameters
- (i)
- Z is open and we introduce the mapWe consider the following subset of the infinite dimensional spaceand we suppose that
- (ii)
- for every fixed the setis an exponential family. As a consequence is a convex subset in and are functions linearly independent over X.
3.2. Fisher Metric for an Exponential Family with External Parameters
4. A Synopsis of Ehresmann Connections
Parallel Transport Equation
5. Some Applications of Exponential Families with External Parameters
5.1. Thermodynamic Length
5.2. Isentropic Evolution Driven by External Parameters
6. Information Geometry of Gradient Systems
6.1. A Dynamic Approximation Problem
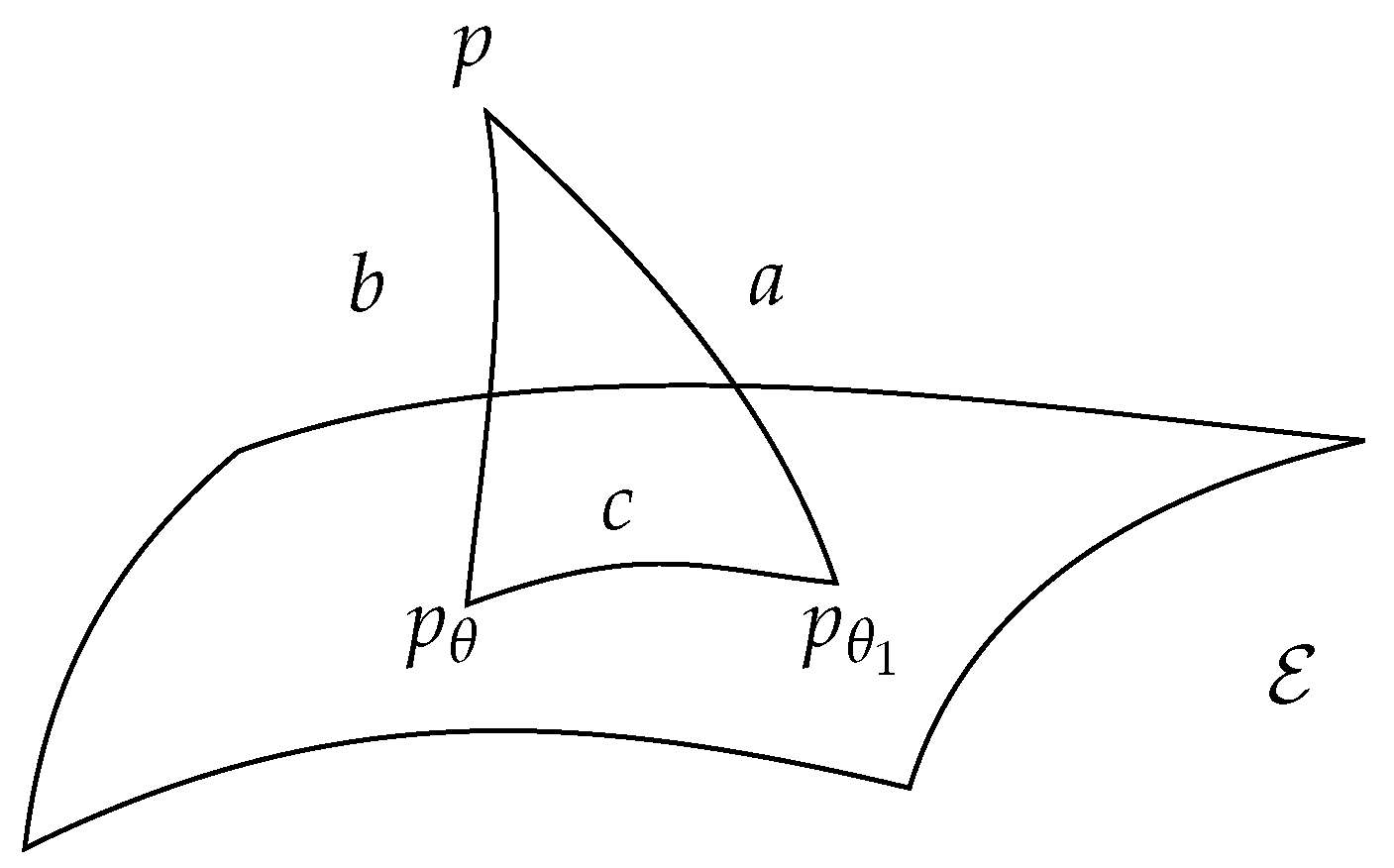
Triangular Relation
6.2. A Dynamic Approximation Problem with External Parameters
Funding
Acknowledgments
Conflicts of Interest
Appendix A. An Approximation Problem in Quantitative Genetics
References
- Jaynes, E.T. Probability Theory: The Logic of Science; Cambridge University Press: New York, NY, USA, 2003. [Google Scholar]
- De Vladar, H.P.; Barton, N.H. The statistical mechanics of a polygenic character under stabilizing selection, mutation and drift. J. R. Soc. Interface 2011, 8, 720–739. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bodova, K.; Haskovec, J.; Markowich, P. Well posedness and maximum entropy approximation for the dynamics of quantitative traits. Phys. D Nonlinear Phenom. 2018, 376, 108–120. [Google Scholar] [CrossRef] [Green Version]
- Bodova, K.; Szep, E.; Barton, N.H. Dynamic maximum entropy provides accurate approximation of structured population dynamics. PLoS Comput. Biol. 2021, 17, e1009661. [Google Scholar]
- Weinhold, F. Metric geometry of equilibrium thermodynamics. J. Chem. Phys. 1975, 63, 2479–2483. [Google Scholar] [CrossRef]
- Ruppeiner, G. Thermodynamics: A Riemannian geometric model. Phys. Rev. A 1979, 20, 1608. [Google Scholar] [CrossRef]
- Janke, W.; Johnston, D.A.; Kenna, R. Information geometry and phase transitions. Phys. A Stat. Mech. Its Appl. 2004, 336, 181–186. [Google Scholar] [CrossRef] [Green Version]
- Brody, D.; Rivier, N. Geometrical aspects of statistical mechanics. Phys. Rev. E 1995, 51, 1006. [Google Scholar] [CrossRef]
- Prokopenko, M.; Lizier, J.T.; Obst, O.; Wang, X.R. Relating Fisher information to order parameters. Phys. Rev. E 2011, 84, 041116. [Google Scholar] [CrossRef] [Green Version]
- Brody, D.C.; Ritz, A. Information geometry of finite Ising models. J. Geom. Phys. 2003, 47, 207–220. [Google Scholar] [CrossRef]
- Salamon, P.; Berry, R.S. Thermodynamic length and dissipated availability. Phys. Rev. Lett. 1983, 51, 1127–1130. [Google Scholar] [CrossRef]
- Crooks, G.E. Fisher information and statistical mechanics. Tech. Rep. 2011, 1–3. [Google Scholar]
- Crooks, G.E. Measuring thermodynamic length. Phys. Rev. Lett. 2007, 99, 100602. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ito, S. Stochastic thermodynamic interpretation of information geometry. Phys. Rev. Lett. 2018, 121, 030605. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Abiuso, P.; Miller, H.J.; Perarnau-Llobet, M.; Scandi, M. Geometric optimisation of quantum thermodynamic processes. Entropy 2020, 22, 1076. [Google Scholar] [CrossRef] [PubMed]
- Naudts, J. The q-exponential family in statistical physics. Cent. Eur. J. Phys. 2009, 7, 405–413. [Google Scholar] [CrossRef] [Green Version]
- Naudts, J. Generalised exponential families and associated entropy functions. Entropy 2008, 10, 131–149. [Google Scholar] [CrossRef] [Green Version]
- Amari, S.I.; Ohara, A. Geometry of q-exponential family of probability distributions. Entropy 2011, 13, 1170–1185. [Google Scholar] [CrossRef]
- Tsallis, C. Possible generalization of Boltzmann-Gibbs statistics. J. Stat. Phys. 1988, 52, 479–487. [Google Scholar] [CrossRef]
- Watanabe, S. Algebraic Geometry and Statistical Learning Theory; No. 25; Cambridge University Press: Cambridge, UK, 2009. [Google Scholar]
- Favretti, M. Geometry and Control of Thermodynamic Systems described by Generalized Exponential Families. J. Geom. Phys. 2022, 176, 104497. [Google Scholar] [CrossRef]
- Amari, S.; Nagaoka, H. Methods of Information Geometry; AMS: Premstätten, Austria; Oxford University Press: Oxford, UK, 2000. [Google Scholar]
- Barndorff-Nielsen, O. Information and Exponential Families: In Statistical Theory; John Wiley & Sons: Hoboken, NJ, USA, 2014. [Google Scholar]
- Calin, O.; Udriste, C. Geometric Modeling in Probability and Statistics; Springer: Berlin, Germany, 2014. [Google Scholar]
- Murray, M.K.; Rice, J.W. Differential Geometry and Statistics; CRC Press: Boca Raton, FL, USA, 1993; Volume 48. [Google Scholar]
- Souriau, J.-M. Structure of Dynamical Systems: A Symplectic View of Physics; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012; Volume 149. [Google Scholar]
- Amari, S. Information Geometry and Its Applications; Springer: Berlin/Heidelberg, Germany, 2016; Volume 194. [Google Scholar]
- Jaynes, E.T. Brandeis Lectures. In Papers on Probability, Statistics and Statistical Physics; Rosenkrantz, E.D., Ed.; Springer: Dordrecht, The Netherlands, 1989; pp. 39–76. [Google Scholar]
- Rubinstein, M.; Ralph, H.C. Polymer Physics; Oxford University Press: New York, NY, USA, 2003; Volume 23. [Google Scholar]
- Fisher, R.A. On the mathematical foundations of theoretical statistics. In Philosophical Transactions of the Royal Society of London; Series A, Containing Papers of a Mathematical or Physical Character; Royal Society of London: London, UK, 1922. [Google Scholar]
- Dubey, S.D. Compound gamma, beta and F distributions. Metrika 1970, 16, 27–31. [Google Scholar] [CrossRef]
- Marsden, J.E.; Montgomery, R.; Ratiu, T.S. Reduction, Symmetry, and Phases in Mechanics; American Mathematical Soc.: Providence, RI, USA, 1990; Volume 436. [Google Scholar]
- Souriau, J.M. Mecanique statistique, groupes de Lie et cosmologie. GeoM. Symplectique et Phys. Math. 1974, 237. [Google Scholar]
- Risken, H. The Fokker-Planck Equation. Methods of Solutions and Applications; Springer: Berlin/Heidelberg, Germany, 1984. [Google Scholar]
- Villani, C. Topics in Optimal Transportation; American Mathematical Soc.: Providence, RI, USA, 2021; Volume 58. [Google Scholar]
- Yamano, T. Phase space gradient of dissipated work and information: A role of relative Fisher information. J. Math. Phys. 2013, 54, 113301. [Google Scholar] [CrossRef] [Green Version]
- Rice, S. Evolutionary Theory: Mathematical and Conceptual Foundations; Sinauer Associates, Inc. Publishers: Sunderland, MA, USA, 2004. [Google Scholar]
- Wright, S. Evolution in Mendelian populations. Genetics 1931, 16, 97. [Google Scholar] [CrossRef] [PubMed]
- Kimura, M. Solution of a process of random genetic drift with a continuous model. Proc. Natl. Acad. Sci. USA 1955, 41, 144. [Google Scholar] [CrossRef] [Green Version]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Favretti, M. Exponential Families with External Parameters. Entropy 2022, 24, 698. https://doi.org/10.3390/e24050698
Favretti M. Exponential Families with External Parameters. Entropy. 2022; 24(5):698. https://doi.org/10.3390/e24050698
Chicago/Turabian StyleFavretti, Marco. 2022. "Exponential Families with External Parameters" Entropy 24, no. 5: 698. https://doi.org/10.3390/e24050698
APA StyleFavretti, M. (2022). Exponential Families with External Parameters. Entropy, 24(5), 698. https://doi.org/10.3390/e24050698