
Neural Adaptive Funnel Dynamic Surface Control with Disturbance-Observer for the PMSM with Time Delays


Abstract
:1. Introduction
- (a)
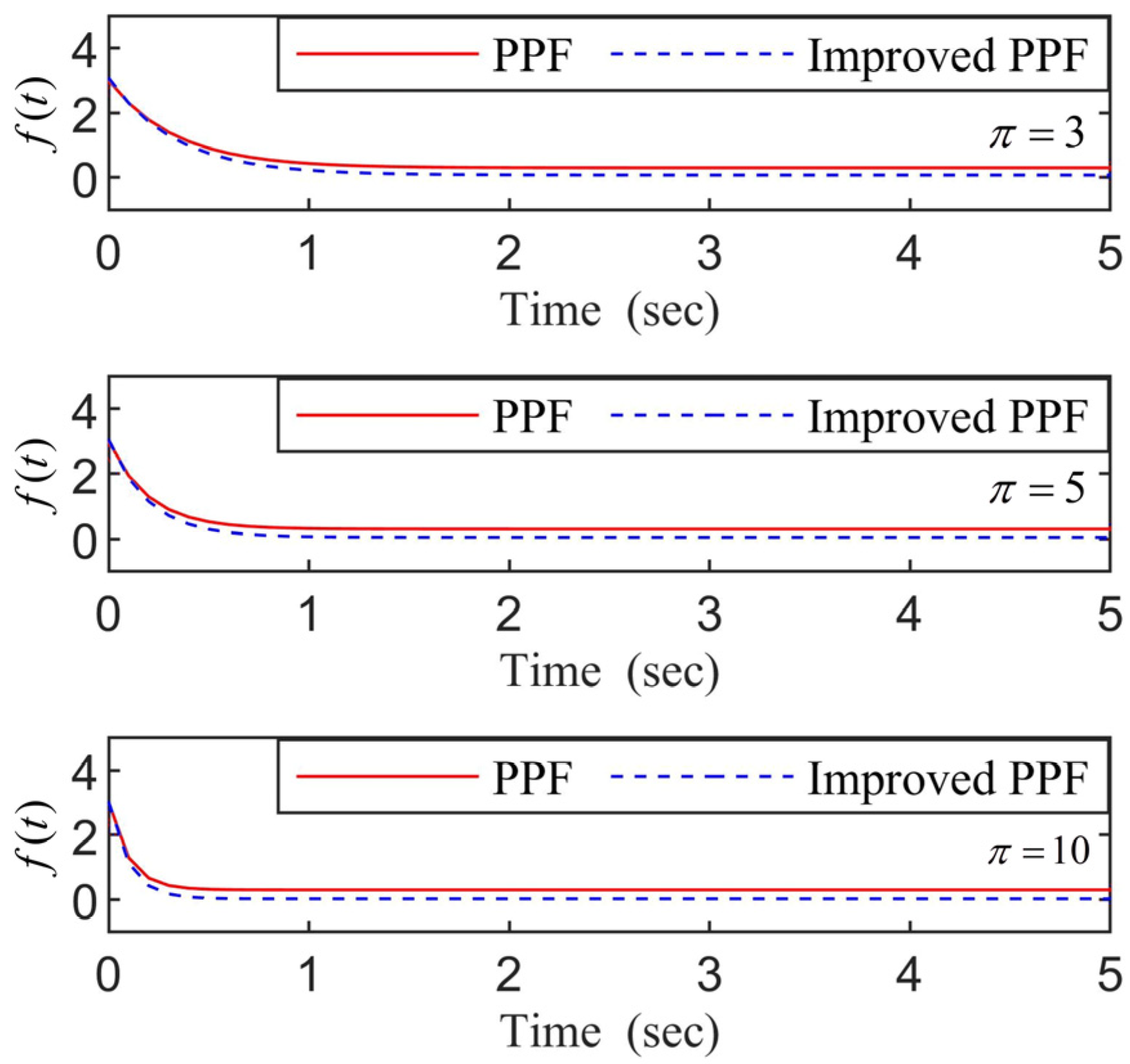
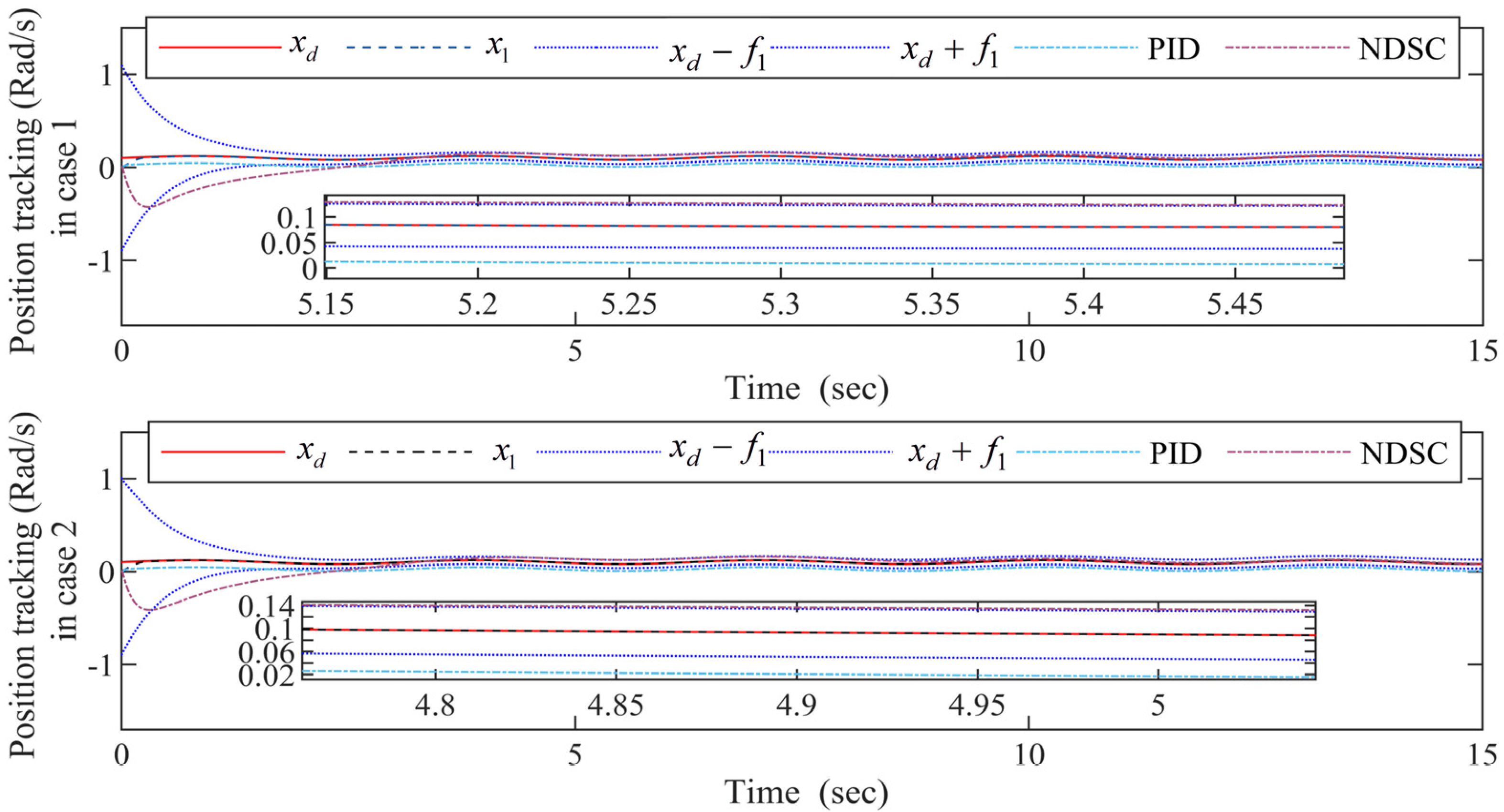
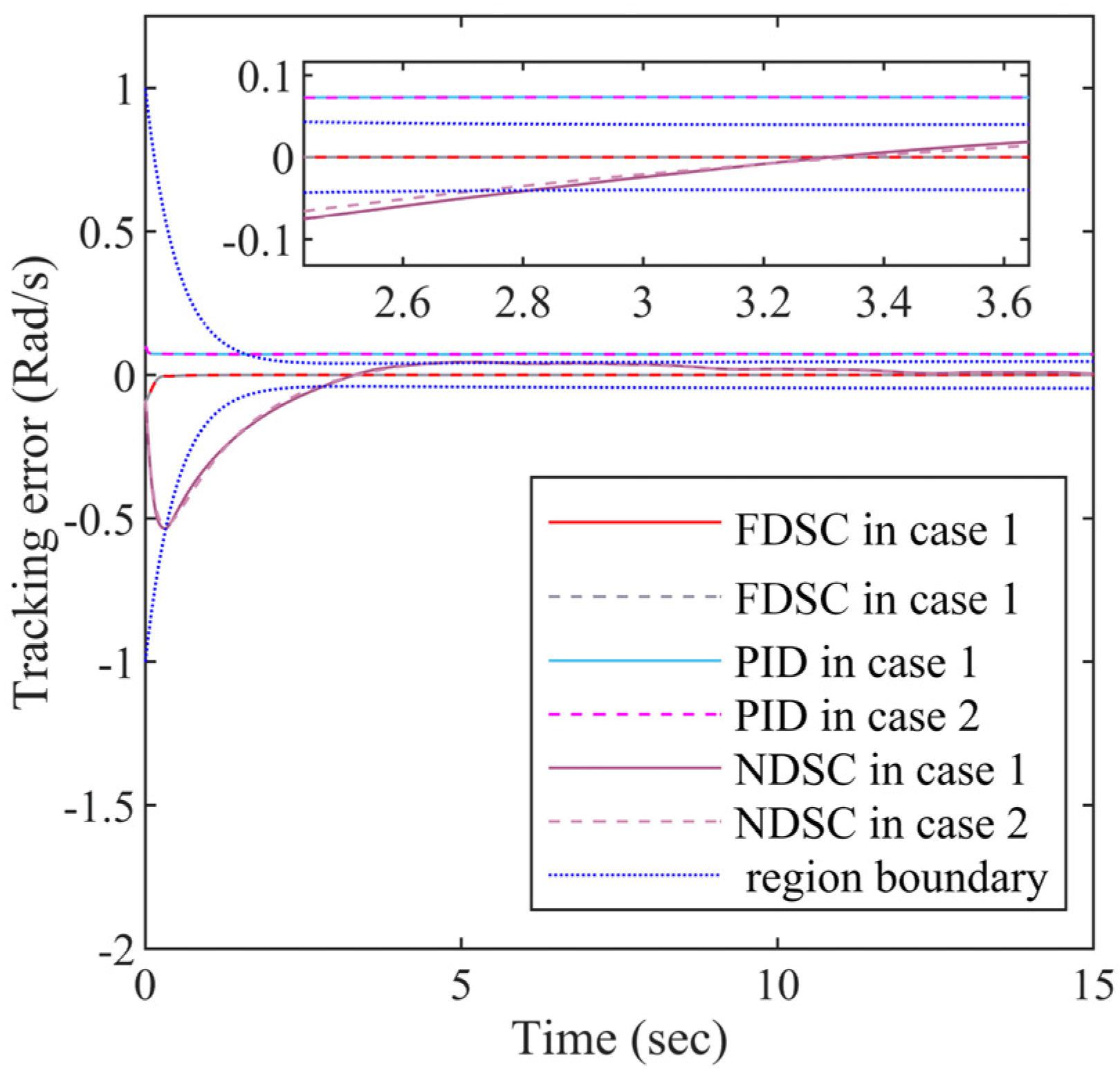
- The prescribed performance control method can ensure the tracking error converges to a predefined arbitrary small residual set [24,25]. However, the transient performance still needs to be improved. Upon this, a neural adaptive funnel control strategy with advanced transient performance is proposed to restrict the output response of PMSM into a certain funnel region. The simulation section compares the funnel control method with neural dynamic surface control (NDSC) and PID methods, and the funnel controller has smaller tracking error and better transient performance. The advanced transient performance makes the devised controller more applicable.
- (b)
- The constraint-considered controller can reasonably simulate the physical constraints in the actual operating environment of the PMSM [23,25]. Nevertheless, there are many other nonlinear factors in the actual industries that need to be taken into account. The FDSC method considers output constraints, time delays, and mismatched external load interference, which allows FDSC to simulate the actual situation more realistically. The Lyapunov-Krasovskii functionals and DO are devised to suppress the time delays and approximate the unmatched external load interference. The simulation section shows that the FDSC method has smaller steady-state and transient errors, and the robustness and dynamic performances are strengthened compared with the NDSC and the PID schemes.
2. System Formulation and Preliminaries
2.1. System Statement
- (a)
- The system output tracks the desired signal , where the transient control behavior of (3) can be retained by (4).
- (b)
- The other signals in the resulting system are bounded.
2.2. Neural Network Systems and Function Approximation
3. Design of Neural Adaptive Funnel Control
3.1. Funnel Control with Improved Prescribed Performance Function
3.2. Disturbance Observer
3.3. Neural Adaptive Funnel Controller Design
- Step 1. The design of the stunning control law and the adaptive law .
- Step 2. The design of the stunning control law and the adaptive law .
- Step 3. The design of the actual controller and the adaptive law .
- Step 4. The design of the actual controller and the adaptive law .
4. Stability Analysis
4.1. Verification of the Boundedness for All Variables
4.2. Deduction of the Binding Ranges for Variables
5. Simulation and Comparison Results
5.1. Design of Controllers
5.1.1. FDSC
5.1.2. NDSC
5.1.3. PID
- (a)
- Integration over the absolute value of the error (IAE):
- (b)
- Integration over time and the absolute value of the error (ITAE):
- (c)
- Integration over squared error (ISE):
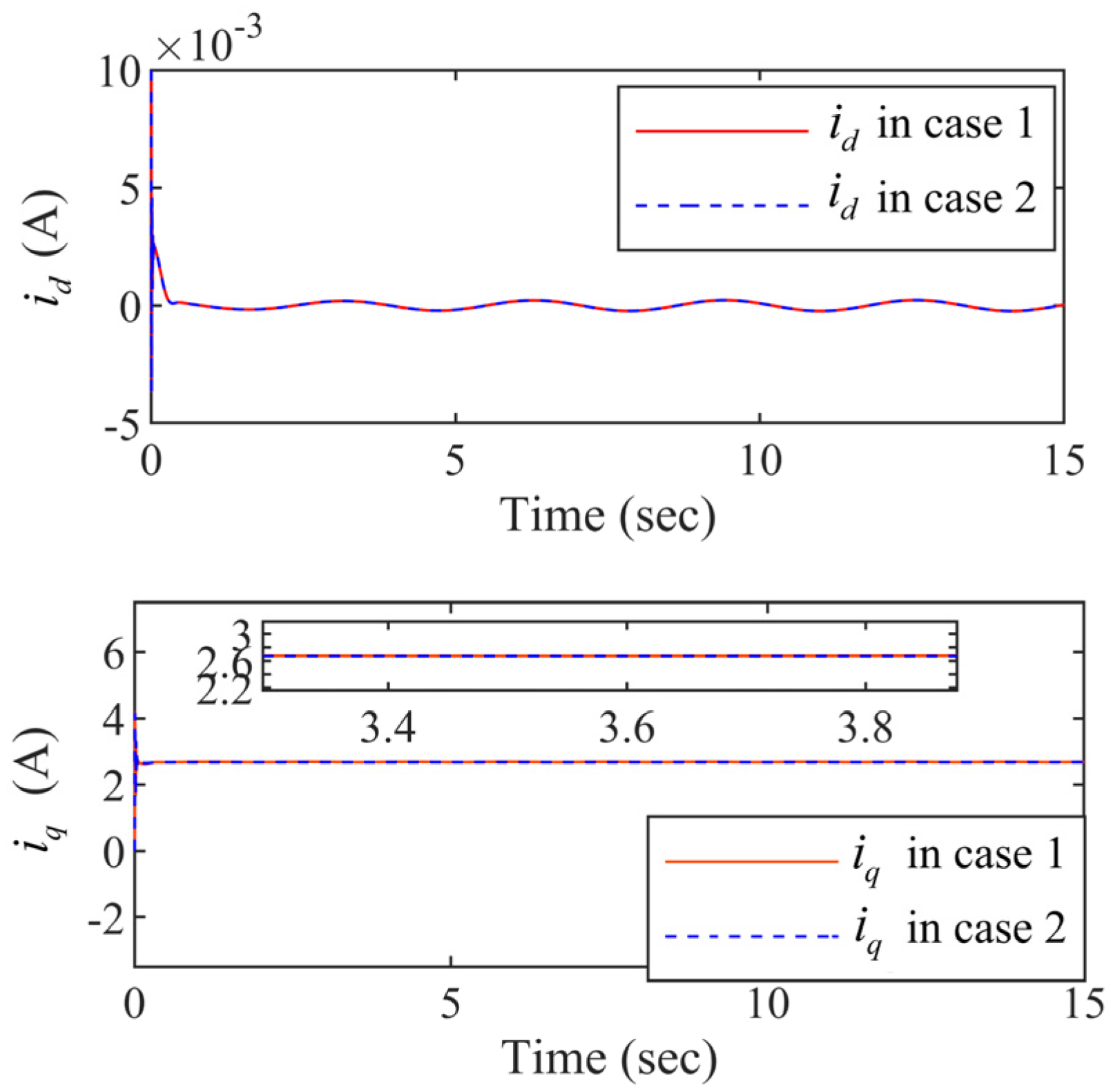
5.2. Simulation Comparison Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| Acronyms | |
| PMSM | Permanent magnetic synchronous motor |
| SVPWM | Space vector pulse width modulation |
| NN | Neural network |
| RBFNN | Radial basis function neural network |
| DO | Disturbance observer |
| PPF | Prescribed performance function |
| FDSC | Funnel dynamic surface control |
| NDSC | Neural dynamic surface control |
| PID | Proportion integral differential |
| IAE | Integration over the absolute value of the error |
| ITAE | Integration over time and the absolute value of the error |
| ISE | Integration over squared error |
| Variables | |
| State variables | |
| External disturbance term | |
| Time delay terms | |
| Desired weight vector of RBFNN | |
| Updated weight vector | |
| Estimation error | |
| Receptive field centers | |
| Unknown variables | |
| The output of first-order filters | |
| Virtual controllers, the input of first-order filters | |
| First-order filter errors | |
| Modified funnel variable | |
| Functions | |
| Positive funnel prescribed performance function | |
| Gain function over time | |
| Scaling function | |
| Parameters | |
| Node numbers of RBFNN | |
| Widths of the Gaussian functions |
References
- Sirimanna, S.; Thanatheepan, B.; Lee, D.; Agrawal, S.; Yu, Y.; Wang, Y.; Anderson, A.; Banerjee, A.; Haran, K. Comparison of electrified aircraft propulsion drive systems with different electric motor topologies. J. Propul. Power 2021, 37, 733–747. [Google Scholar] [CrossRef]
- Foitzik, S.; Doppelbauer, M. Fault tolerant control of a three-phase PMSM by limiting the heat of an inter-turn fault. IET Electr. Power Appl. 2022, 16, 158–168. [Google Scholar] [CrossRef]
- Qiu, Z.; Chen, Y.; Guan, Y.; Kang, Y. Vibration noise suppression algorithm of permanent magnet synchronous motor for new energy vehicles. Int. J. Heavy Veh. Syst. 2022, 29, 48–70. [Google Scholar] [CrossRef]
- Hu, D.; Yang, L.; Yi, F.; Hu, L.; Yang, Q.; Zhou, J. Optimization of speed response of super-high-speed electric air compressor for hydrogen fuel cell vehicle considering the transient current. Int. J. Hydrogen Energy 2021, 46, 27183–27192. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, S.; Li, S.; Zhou, P. Adaptive neural dynamic surface control for the chaotic PMSM system with external disturbances and constrained output. Recent Adv. Electr. Electron. Eng. 2020, 13, 894–905. [Google Scholar]
- Swaroop, D.; Hedrick, J.K.; Yip, P.P.; Gerdes, J.C. Dynamic surface control for a class of nonlinear systems. IEEE Trans. Autom. Control 2000, 45, 1893–1899. [Google Scholar] [CrossRef] [Green Version]
- Lv, Z.; Ma, Y.; Liu, J.; Yu, J. Full-state constrained adaptive fuzzy finite-time dynamic surface control for pmsm drive systems. Int. J. Fuzzy Syst. 2021, 23, 804–815. [Google Scholar] [CrossRef]
- Jiang, Y.; Xu, W.; Mu, C.; Zhu, J.; Dian, R. An improved third-order generalized integral flux observer for sensorless drive of PMSMs. IEEE Trans. Ind. Electron. 2019, 66, 9149–9160. [Google Scholar] [CrossRef]
- Ke, D.; Wang, F.; He, L.; Li, Z. Predictive current control for PMSM systems using extended sliding mode observer with hurwitz-based power reaching law. IEEE Trans. Power Electron. 2021, 36, 7223–7232. [Google Scholar] [CrossRef]
- Lian, C.; Xiao, F.; Liu, J.; Gao, S. Analysis and compensation of the rotor position offset error and time delay in field-oriented-controlled PMSM drives. IET Power Electron. 2020, 13, 1911–1918. [Google Scholar] [CrossRef]
- Ali, N.; Rehman, A.U.; Alam, W.; Maqsood, H. Disturbance observer based robust sliding mode control of permanent magnet synchronous motor. J. Electr. Eng. Technol. 2019, 14, 2531–2538. [Google Scholar] [CrossRef]
- Raj, F.V.A.; Kannan, V.K. Particle swarm optimized deep convolutional neural sugeno-takagi fuzzy PID controller in permanent magnet synchronous motor. Int. J. Fuzzy Syst. 2022, 24, 180–201. [Google Scholar] [CrossRef]
- Liu, M.; Lu, B.; Li, Z.; Jiang, H.; Hu, C. Fixed-time synchronization control of delayed dynamical complex networks. Entropy 2021, 23, 1610. [Google Scholar] [CrossRef] [PubMed]
- Xu, Y.; Li, S.; Zou, J. Integral sliding mode control based deadbeat predictive current control for PMSM drives with disturbance rejection. IEEE Trans. Power Electron. 2022, 37, 2845–2856. [Google Scholar] [CrossRef]
- Li, R.; Zhu, Q.; Yang, J.; Narayan, P.; Yue, X. Disturbance-Observer-Based U-Control (DOBUC) for nonlinear dynamic systems. Entropy 2021, 23, 1625. [Google Scholar] [CrossRef]
- Wang, Y.; Yu, H.; Liu, Y. Speed-current single-loop control with overcurrent protection for PMSM based on time-varying nonlinear disturbance observer. IEEE Trans. Ind. Electron. 2022, 69, 179–189. [Google Scholar] [CrossRef]
- Cho, H.J.; Kwon, Y.C.; Sul, S.K. Time-optimal voltage vector transition scheme for six-step operation of PMSM. IEEE Trans. Power Electron. 2021, 36, 5724–5735. [Google Scholar] [CrossRef]
- Dai, C.; Guo, T.; Yang, J.; Li, S. A disturbance observer-based current-constrained controller for speed regulation of PMSM systems subject to unmatched disturbances. IEEE Trans. Ind. Electron. 2021, 68, 767–775. [Google Scholar] [CrossRef]
- Ge, Y.; Yang, L.; Ma, X. HGO and neural network based integral sliding mode control for PMSMs with uncertainty. J. Power Electron. 2020, 20, 1206–1221. [Google Scholar] [CrossRef]
- Xu, M.; Huo, Z.; Li, S.; Jiang, L. Active steering PMSM speed control with wavelet neural network. Int. J. Veh. Des. 2020, 82, 64–74. [Google Scholar] [CrossRef]
- Xu, B.; Zhang, L.; Ji, W. Improved non-singular fast terminal sliding mode control with disturbance observer for PMSM drives. IEEE Trans. Transp. Electrif. 2021, 7, 2753–2762. [Google Scholar] [CrossRef]
- Hou, Q.; Ding, S.; Yu, X. Composite super-twisting sliding mode control design for PMSM speed regulation problem based on a novel disturbance observer. IEEE Trans. Energy Convers. 2021, 36, 2591–2599. [Google Scholar] [CrossRef]
- Shao, X.; Si, H.; Zhang, W. Event-triggered neural intelligent control for uncertain nonlinear systems with specified-time guaranteed behaviors. Neural Comput. Appl. 2021, 33, 5771–5791. [Google Scholar] [CrossRef]
- Zheng, Z.; Lau, G.-K.; Xie, L. Event-triggered control for a saturated nonlinear system with prescribed performance and finite-time convergence. Int. J. Robust Nonlinear Control 2018, 28, 5312–5325. [Google Scholar] [CrossRef]
- Shi, Y.; Shao, X. Neural adaptive appointed-time control for flexible air-breathing hypersonic vehicles: An event-triggered case. Neural Comput. Appl. 2021, 33, 9545–9563. [Google Scholar] [CrossRef]
- Zeng, Q.; Zhao, J. Event-triggered adaptive finite-time control for active suspension systems with prescribed performance. IEEE Trans. Ind. Inf. 2021. [Google Scholar] [CrossRef]
- Shao, X.; Si, H.; Zhang, W. Fuzzy wavelet neural control with improved prescribed performance for MEMS gyroscope subject to input quantization. Fuzzy Sets Syst. 2020, 411, 136–154. [Google Scholar] [CrossRef]
- Wang, S.; Li, S.; Chen, Q.; Ren, X.; Yu, H. Funnel tracking control for nonlinear servo drive systems with unknown disturbances. ISA Trans. 2021. [Google Scholar] [CrossRef]
- Liu, C.; Wang, H.; Liu, X.; Zhou, Y. Adaptive finite-time fuzzy funnel control for nonaffine nonlinear systems. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 2894–2903. [Google Scholar] [CrossRef]
- Wang, S.; Ren, X.; Na, J.; Zeng, T. Extended-state-observer-based funnel control for nonlinear servomechanisms with prescribed tracking performance. IEEE Trans. Autom. Sci. Eng. 2017, 14, 98–108. [Google Scholar] [CrossRef]
- Bao, J.; Wang, H.; Xiaoping Liu, P. Adaptive finite-time tracking control for robotic manipulators with funnel boundary. Int. J. Adapt. Control Signal Process. 2020, 34, 575–589. [Google Scholar] [CrossRef]
- Zhu, Q.; Xiong, L.; Liu, H. A robust speed controller with smith predictor for a PMSM drive system with time delay. Int. J. Control Autom. Syst. 2017, 15, 2448–2454. [Google Scholar] [CrossRef]
- Xing, H.; Ploeg, J.; Nijmeijer, H. Smith predictor compensating for vehicle actuator delays in cooperative ACC systems. IEEE Trans. Veh. Technol. 2019, 68, 1106–1115. [Google Scholar] [CrossRef]
- Vadivel, R.; Joo, Y.H. Reliable fuzzy H∞ control for permanent magnet synchronous motor against stochastic actuator faults. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 2232–2245. [Google Scholar] [CrossRef]
- Shanmugam, L.; Joo, Y.H. Design of interval type-2 fuzzy-based sampled-data controller for nonlinear systems using novel fuzzy Lyapunov functional and its application to PMSM. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 542–551. [Google Scholar] [CrossRef]
- Gong, C.; Hu, Y.; Gao, J.; Wang, Y.; Yan, L. An improved delay-suppressed sliding-mode observer for sensorless vector-controlled PMSM. IEEE Trans. Ind. Electron. 2020, 67, 5913–5923. [Google Scholar] [CrossRef]
- Si, W.; Qi, L.; Hou, N.; Dong, X. Finite-time adaptive neural control for uncertain nonlinear time-delay systems with actuator delay and full-state constraints. Int. J. Syst. Sci. 2019, 50, 726–738. [Google Scholar] [CrossRef]
- Wei, L.; Qian, C. Adaptive control of nonlinearly parameterized systems: The smooth feedback case. IEEE Trans. Autom. Control 2001, 47, 1249–1266. [Google Scholar]
- Qian, C.; Wei, L. Non-Lipschitz continuous stabilizers for nonlinear systems with uncontrollable unstable linearization. Syst. Control Lett. 2015, 42, 185–200. [Google Scholar] [CrossRef]
- Fang, W.; Bing, C.; Chong, L.; Jing, Z.; Meng, X. Adaptive neural network finite-time output feedback control of quantized nonlinear systems. IEEE Trans. Cybern. 2018, 48, 1839–1848. [Google Scholar]
- Wang, H.; Sun, W.; Liu, P.X. Adaptive intelligent control of nonaffine nonlinear time-delay systems with dynamic uncertainties. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 1474–1485. [Google Scholar] [CrossRef]
- Yang, X.; Zheng, X. Adaptive nn backstepping control design for a 3-dof helicopter: Theory and experiments. IEEE Trans. Ind. Electron. 2020, 67, 3967–3979. [Google Scholar] [CrossRef]
- Liu, H.; Pan, Y.; Cao, J.; Wang, H.; Zhou, Y. Adaptive neural network backstepping control of fractional-order nonlinear systems with actuator faults. IEEE Trans. Neural Networks Learn. Syst. 2020, 31, 5166–5177. [Google Scholar] [CrossRef]
- Wang, H.; Li, M.; Zhang, C.; Shao, X. Event-based prescribed performance control for dynamic positioning vessels. IEEE Trans. Circuits Syst. II Express Briefs 2021, 68, 2548–2552. [Google Scholar] [CrossRef]
- Li, F.; Liu, Y. Prescribed-performance control design for pure-feedback nonlinear systems with most severe uncertainties. SIAM J. Control Optim. 2018, 56, 517–537. [Google Scholar] [CrossRef]
- Levant, A.; Livne, M. Globally convergent differentiators with variable gains. Int. J. Control 2018, 91, 1994–2008. [Google Scholar] [CrossRef]
- Zhao, K.; Song, Y.; Zhang, Z. Tracking control of MIMO nonlinear systems under full state constraints: A single-parameter adaptation approach free from feasibility conditions. Automatica 2019, 107, 52–60. [Google Scholar] [CrossRef]
- Yue, H.; Wei, Z.; Chen, Q.; Zhang, X. Dynamic surface control for a class of nonlinearly parameterized systems with input time delay using neural network. J. Franklin Inst. 2020, 357, 1961–1986. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Descriptions | Units |
|---|---|---|
| Rotor angular | ||
| Rotor angular velocity, | ||
| First-order derivative of rotor angular velocity | ||
| Currents of axis | ||
| Voltages of axis | ||
| Stator inductances of axis | ||
| Inertia rotor moment | ||
| Friction coefficient | ||
| Inertia magnet flux linkage | ||
| Armature resistance | ||
| Pole pairs | ||
| Load torque |
| Parameters | Values | Parameters | Values | Parameters | Values |
|---|---|---|---|---|---|
| 0 | −0.05 | 0.65 | |||
| 0.5 | 0 | 0.95 | |||
| 0.1 | −0.5 | 0.75 | |||
| 0.01 | 0 | 35 | |||
| 10 | 60 | 0.06 | |||
| 20 | 4 | 0.3 | |||
| 20 | 60 | 0.1 | |||
| 1200 | 0.4 | 0.01 |
| Indicators | FDSC | PID | NDSC | |
|---|---|---|---|---|
| Case 1 | ISE | 0.000661 | 0.079390 | 0.244500 |
| ITAE | 0.005941 | 8.171000 | 2.801000 | |
| IAE | 0.012980 | 1.091000 | 0.978600 | |
| Case 2 | ISE | 0.000661 | 0.079010 | 0.247000 |
| ITAE | 0.005894 | 8.151000 | 2.764000 | |
| IAE | 0.012980 | 1.089000 | 0.970700 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, M.; Li, S.; Zhang, J.; Wu, F.; Zhang, T. Neural Adaptive Funnel Dynamic Surface Control with Disturbance-Observer for the PMSM with Time Delays. Entropy 2022, 24, 1028. https://doi.org/10.3390/e24081028
Li M, Li S, Zhang J, Wu F, Zhang T. Neural Adaptive Funnel Dynamic Surface Control with Disturbance-Observer for the PMSM with Time Delays. Entropy. 2022; 24(8):1028. https://doi.org/10.3390/e24081028
Chicago/Turabian StyleLi, Menghan, Shaobo Li, Junxing Zhang, Fengbin Wu, and Tao Zhang. 2022. "Neural Adaptive Funnel Dynamic Surface Control with Disturbance-Observer for the PMSM with Time Delays" Entropy 24, no. 8: 1028. https://doi.org/10.3390/e24081028